

















")

















 mechanics
mechanicsSimilar presentations:


")







Винтовые механизмы
1. ВИНТОВЫЕ МЕХАНИЗМЫ
Посмотрите https://youtu.be/oyfa8MptZMwШВП
1
2. Назначение ВМ
• Винтовые передачислужат для
преобразования
вращательного движения
в поступательное, реже
наоборот. Основными
деталями винтовой
передачи являются винт
(1) в виде цилиндра с
наружной резьбой и гайка
(2) в виде втулки с
внутренней резьбой.
2
1
2
3. Силовые и кинематические ВМ
• По назначению винтовые механизмы делят насиловые и кинематические. Требования к ним :
• Силовые предназначены для передачи
значительных нагрузок. ТРЕБОВАНИЯ:
высокий КПД ; прочность элементов
передачи — резьбы.
• Кинематические применяют для точных
перемещений узлов машин и приборов.
• ПРОБЛЕМЫ:
• точность преобразования движения,
• минимальные мертвые ходы из-за
зазоров в резьбах,
• минимальные НАКОПЛЕННАЯ и
ПЕРИОДИЧЕСКАЯ (циклическая)
погрешности.
3
4. Достоинства винтовых механизмов
• 1.большое передаточное отношение, компактность.• 2. Посредством винтового механизма достигается и
очень большой выигрыш в силе (это используется в
домкратах, механических
устройствах и т. п.).
прессах,
зажимных
• 3. точность перемещения в системах с винтовыми
ПМ (станки, роботы, приводы устройств ЭВМ и т.д.)
• Относительная!!!
простота
изготовления
(ТЕХНОЛОГИЧНОСТЬ),
• В механизмах с трением скольжения легко
осуществляется надежное самоторможение.
• Возможность реализовать в ВМ РАЗЛИЧНЫЕ виды
трения
– трение
качения
(шариковинтовые
ШВП,
роликовинтовые),
– трение жидкостное (в гидростатических ВМ),
• ВМ с трением качения имеют высокий КПД до 95%.4
5. Недостатки ВМ
• Для винтовых передач с трениемскольжения существенными
недостатками являются невысокое
значение К.П.Д., повышенное трение
(повышенный износ).
• Наличие
мертвого
хода
при
реверсировании.
• Кинематическая
погрешность
и
непростые проблемы ее уменьшения.
• ВМ содержит длинномерные детали –
есть проблемы из-за температурных
и силовых деформаций винтов.
5
6. Схемы ВМ
32
1
3
а) винт (1) вращается и
перемещается поступательно,
гайка (2) неподвижна;
б) винт вращается, гайка
поступательно движется
вдоль винта;
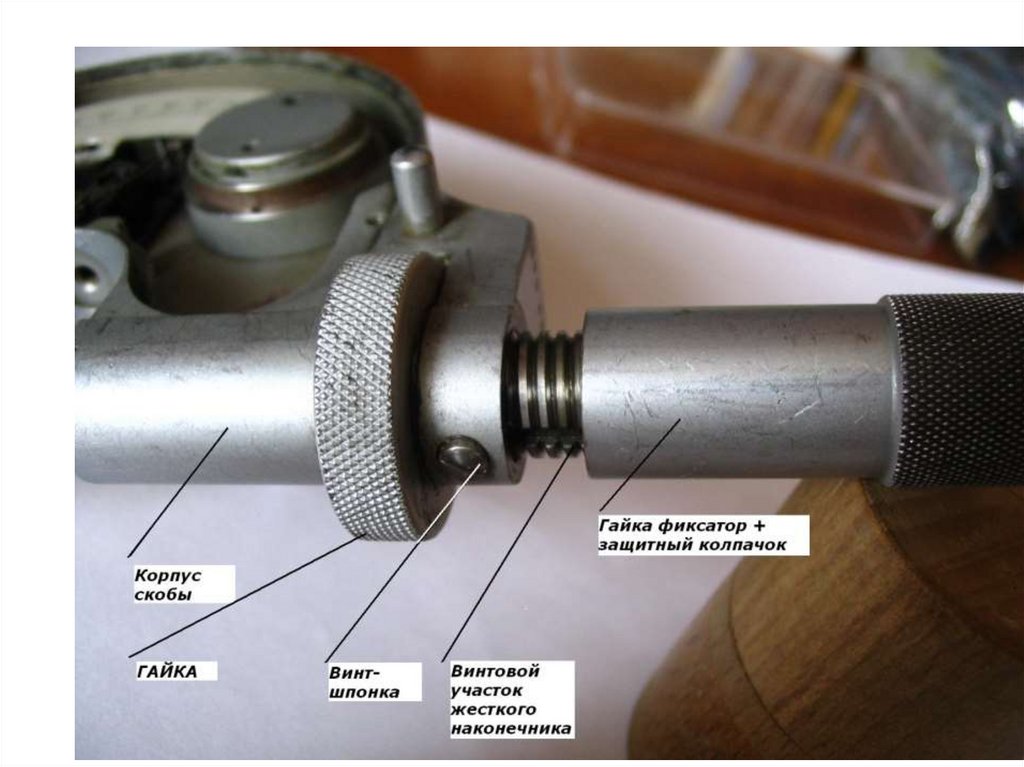
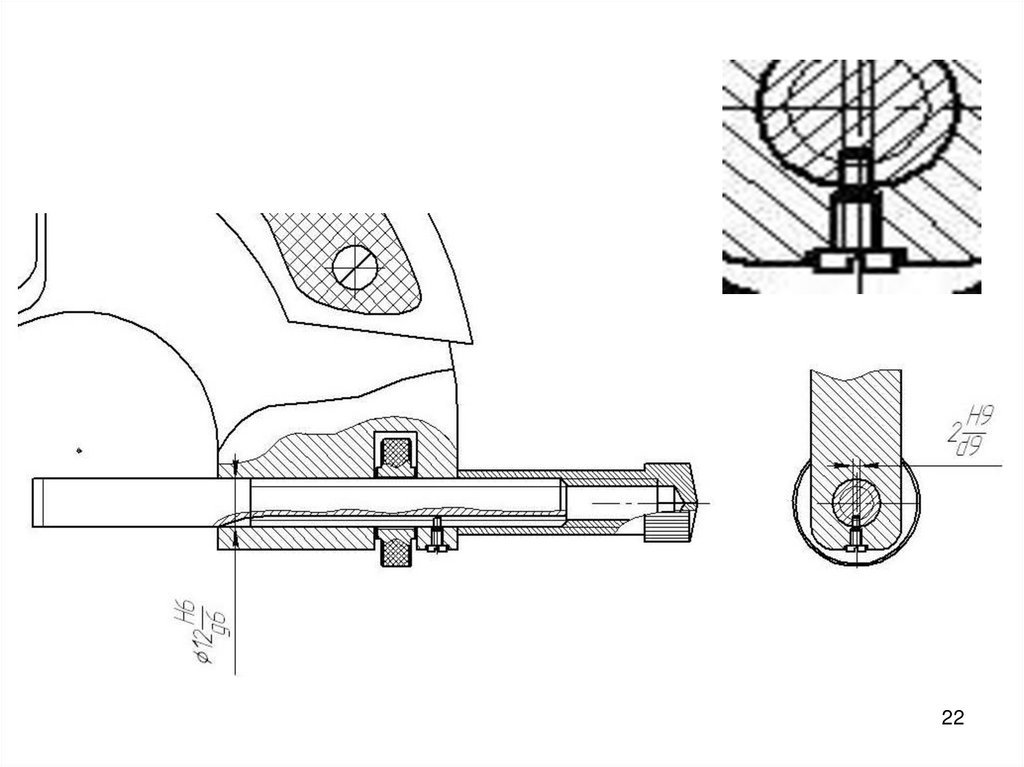
в) гайка вращается, но не
смещается в осевом
направлении, винт движется
поступательно. Вращение
винта заблокировано
шпонкой или ограничителем
поворота (3).
6
7.
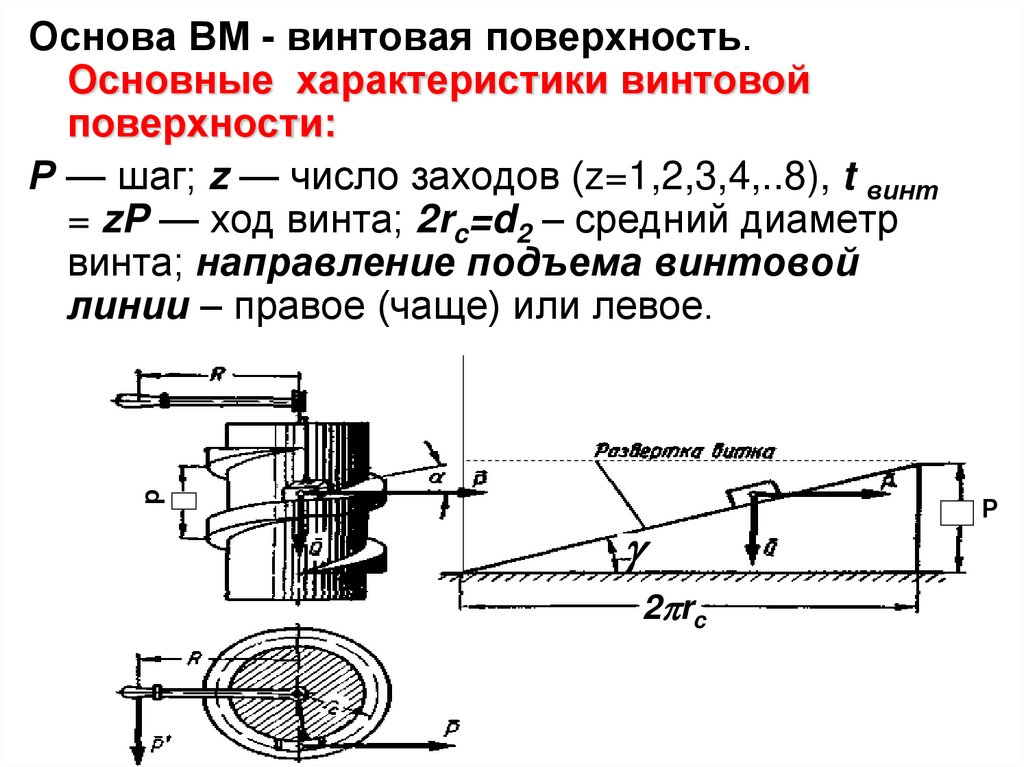
рОснова ВМ - винтовая поверхность.
Основные характеристики винтовой
поверхности:
Р — шаг; z — число заходов (z=1,2,3,4,..8), t винт
= zP — ход винта; 2rc=d2 – средний диаметр
винта; направление подъема винтовой
линии – правое (чаще) или левое.
рР
2 rc
7
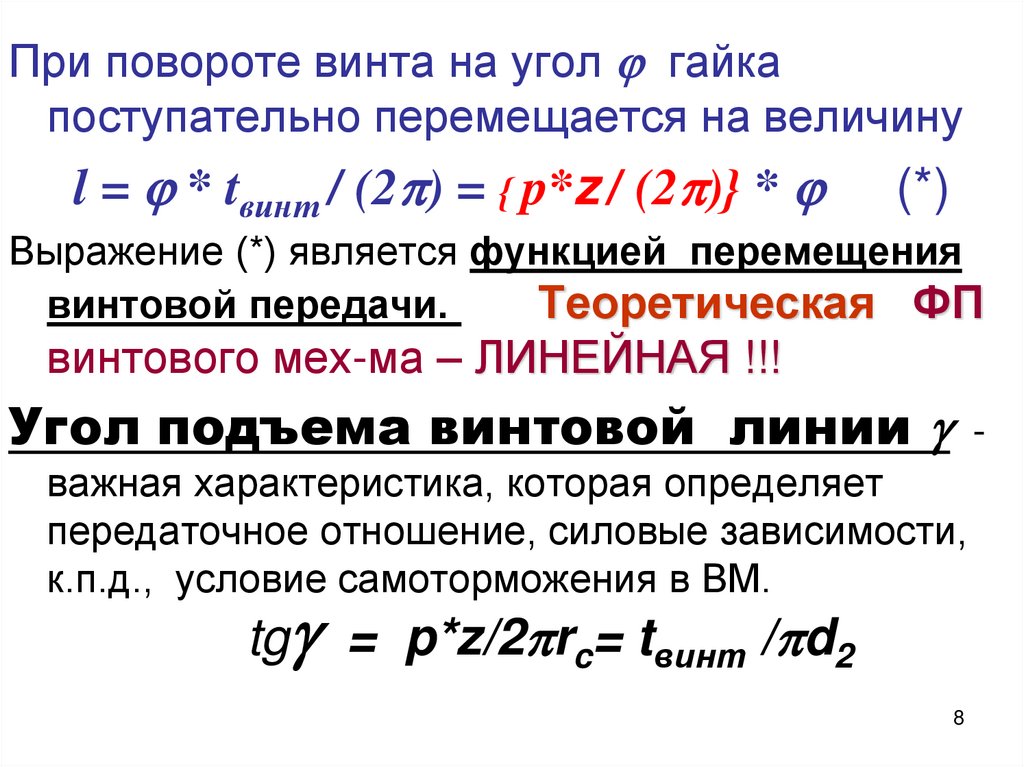
8.
При повороте винта на угол гайкапоступательно перемещается на величину
l = * tвинт / (2 ) = { p*z / (2 )} *
(*)
Выражение (*) является функцией перемещения
винтовой передачи.
Теоретическая ФП
винтового мех-ма – ЛИНЕЙНАЯ !!!
Угол подъема винтовой линии важная характеристика, которая определяет
передаточное отношение, силовые зависимости,
к.п.д., условие самоторможения в ВМ.
tg = p*z/2 rc= tвинт / d2
8
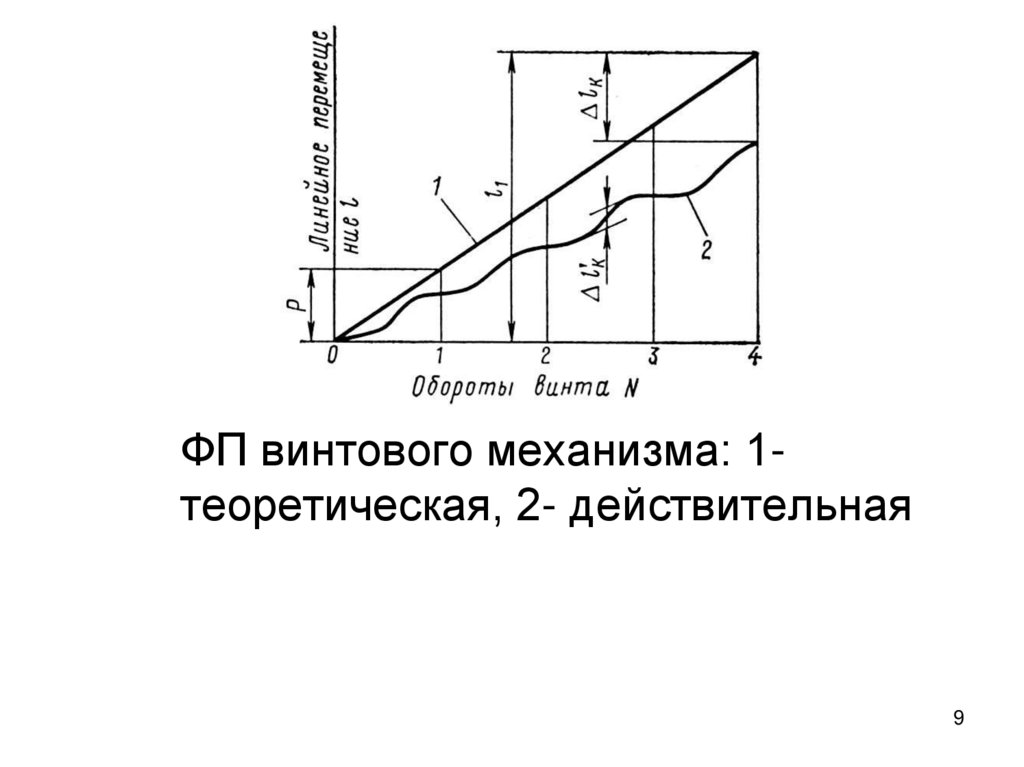
9.
ФП винтового механизма: 1теоретическая, 2- действительная9
10. Передаточное отношение
Передаточное отношение винтовой передачи находим из соотношенияскоростей одной и той же точки винта, совершающей два движения.
Для этого дифференцируем по времени функцию перемещения гайки (или
винта) в винтовом механизме — уравнение (1)
l = (tвинт/(2 ))*
(1),
где tВинт = zP — ход винта ; z — число заходов, Р — шаг.
V2 = 1 tвинт/(2л),
где V2 = dl/ (dt) — линейная скорость точки, движущейся поступательно вдоль
оси винта; 1 = dф/ (dt) — угловая скорость вращения винта.
Линейная скорость точки винта, лежащей на окружности среднего диаметра d2
резьбы,
V1 = 1d2/2.
Передаточное отношение винтовой передачи :
i= V1/V2 = d2 / tвинт = 1/tg
Практически у винтов угол подъема 20...25°и поэтому относительно
большое передаточное отношение винтовых передач обусловливает
возможность получения малых линейных перемещений при больших
угловых перемещениях звеньев.
10
11. Силы и моменты сил в ВМ Задача: определить момент М на винте при осевой силе Fa, действующей на гайке
1112.
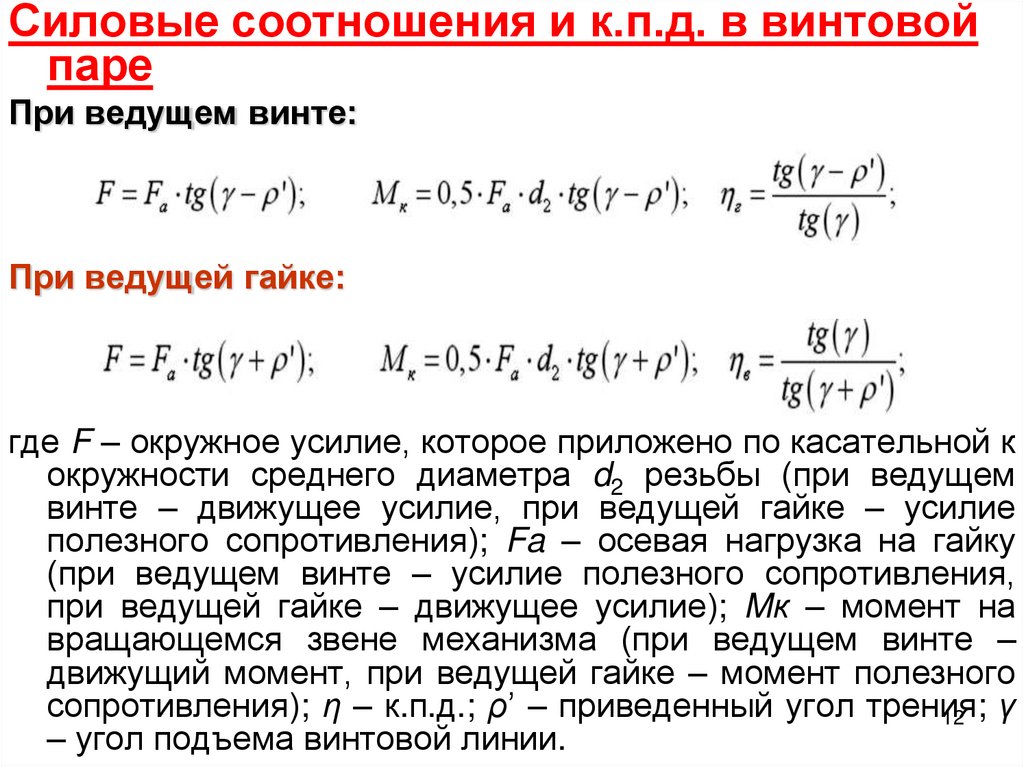
Силовые соотношения и к.п.д. в винтовойпаре
При ведущем винте:
При ведущей гайке:
где F – окружное усилие, которое приложено по касательной к
окружности среднего диаметра d2 резьбы (при ведущем
винте – движущее усилие, при ведущей гайке – усилие
полезного сопротивления); Fa – осевая нагрузка на гайку
(при ведущем винте – усилие полезного сопротивления,
при ведущей гайке – движущее усилие); Mк – момент на
вращающемся звене механизма (при ведущем винте –
движущий момент, при ведущей гайке – момент полезного
сопротивления); η – к.п.д.; ρ’ – приведенный угол трения;
γ
12
– угол подъема винтовой линии.
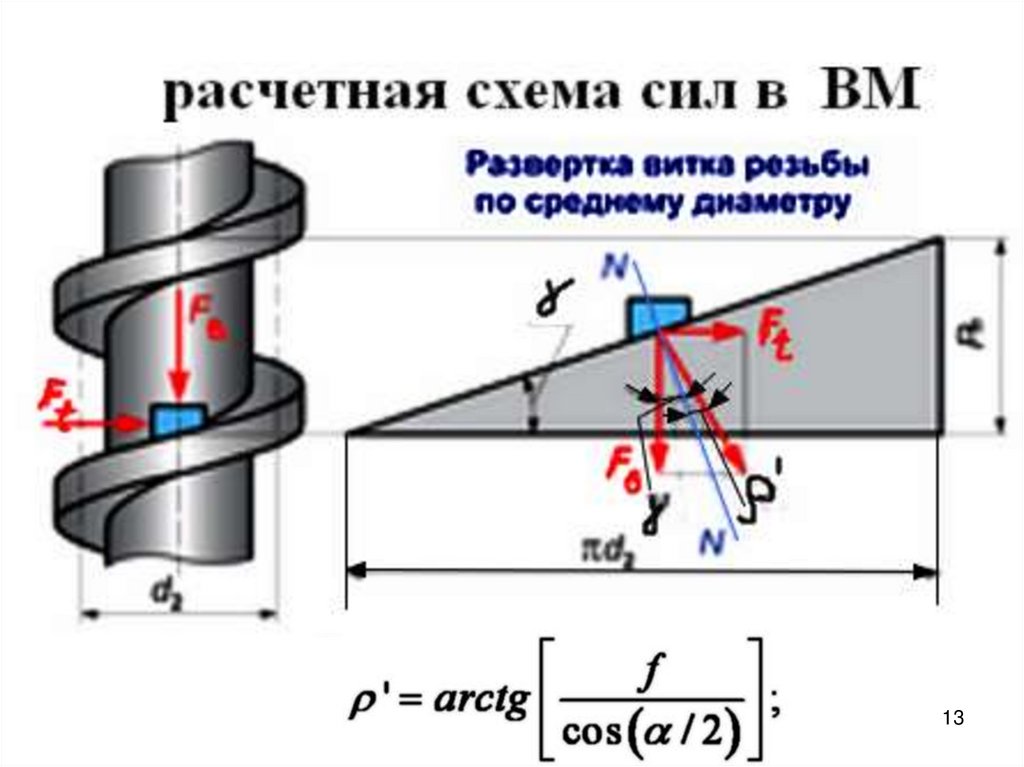
13.
1314.
Для резьбы приведенный угол тренияравен:
f
' arctg
;
cos / 2
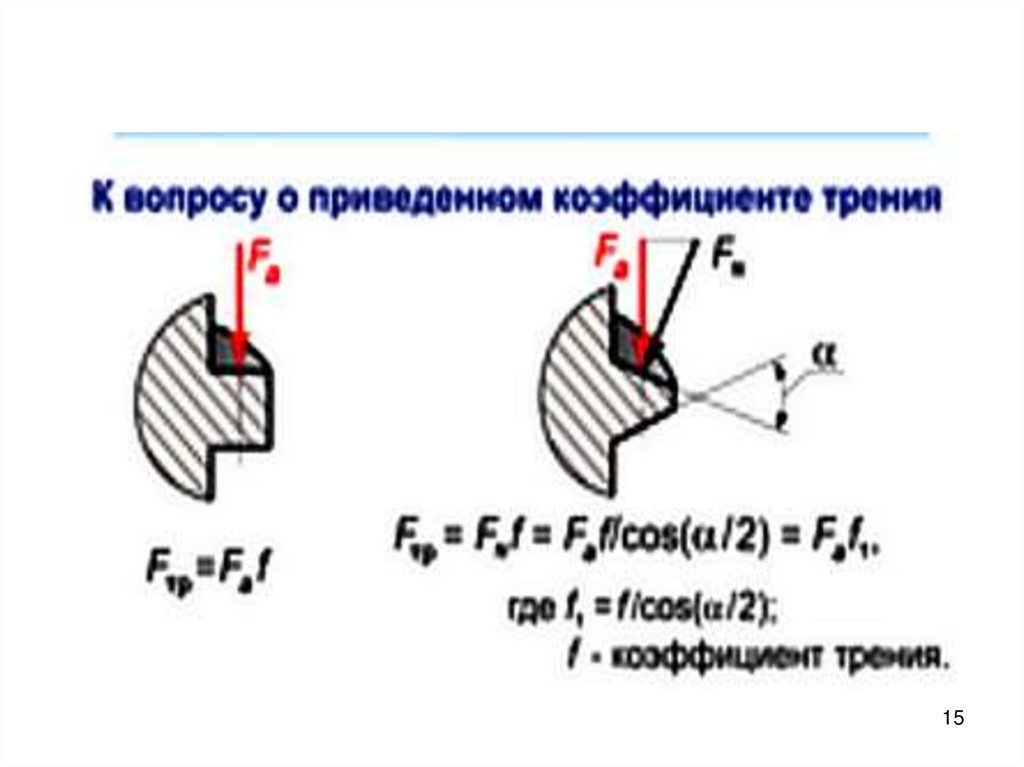
где f – коэффициент трения скольжения
между материалами винта и гайки; α –
угол профиля резьбы.
При этом для прямоугольной резьбы α =
0˚(КПД- максимальный);
для трапецеидальной резьбы α = 30˚; для
метрической резьбы α = 60˚ КПД -ниже
14
15.
1516. В винтовых механизмах применяют резьбы с различными профилями.
1617. Профили резьбы в ВМ и соединениях
Треугольные (метр и дюймовые)- в крепеж.соединениях, в приборных ВМ, низкий КПД,
большое трение, самоторможение….
Трапециидальные – в ВМ (силовых)
прочность и кпд больше, чем у метрической.
Прямоугольные – в ВМ (силовых), самый
высокий кпд ( =0) . Не стандартизованы.
Круглые – спец. назначение(лампочки, соедю
в противогазах, тонкостенных трубопроводах..
Применяют в ВМ – кран-буксы.
Упорные – преимущества трапец и прямоугол
17
18.
• Резьбу метрическую применяют длякрепежных деталей и кинематических
(приборных)винтовых механизмов; она, как
правило, имеет один заход.
• Основные параметры метрической
резьбы: d — номинальный диаметр
резьбы, равный наружному диаметру
болта и гайки (d = D); P — шаг резьбы; —
угол профиля резьбы, равный 60°.
Номинальный диаметр резьбы и ее шаг выбирают в соответствии со
стандартами ГОСТ 9150—81, ГОСТ 8104—81, ГОСТ 2485—81, ГОСТ
2486—81.
18
19.
1920. Схемы ВМ
21
3
а) винт вращается (1) и
перемещается поступательно,
гайка (2) неподвижна;
б) винт вращается, гайка
поступательно движется
вдоль винта;
в) гайка вращается, но не
смещается в осевом
направлении, винт движется
поступательно. Вращение
винта заблокировано
шпонкой или ограничителем
поворота (3).
20
21.
2122.
2223. Самоторможение ВМ
При ведущей гайке выражение преобразованиепоступательного движения гайки во
вращательное движение винта возможно
только при выполнении условия (*), которое
является критерием самоторможения
винтовой передачи.
(*)
‘ – есть самоторможение
> ‘ – нет самоторможения.
Таким образом, выполнение условия (*) зависит
от: 1) коэфф. трения - (материалы,
обработка и смазка), 2)угла подъема винта геометрия (шаг Р, число заходов Z, диаметр
резьбы d2, угол профиля резьбы ).
Наилучшими самотормозящими свойствами
обладает метрическая резьба с мелкими 23
шагами.
24. Пример
2425. Материалы для ВМ с трением скольжения
• ТРЕБОВАНИЕ к материалам: материалы винта игайки должны быть износостойкими и образовывать
антифрикционную пару для уменьшения
коэффициента трения и повышения КПД.
• Винты, не подвергаемые закалке, выполняют из
сталей 45, 50 или А45, А50, У10;
• подвергаемые закалке — из сталей 65Г, 40Х, 40ХГ
• азотируемые — из сталей 40ХФА, 18ХГТ и др.
Азотирование обеспечивает высокую износостойкость и
минимальную деформацию при упрочнении материала, что важно
для точных винтовых передач приборов, которые должны быть
свободны от остаточных напряжений.
• Для материалов гаек ответственных винтовых передач
рекомендуют оловянные бронзы Бр.ОФЮ-1, Бр.ОЦС66-3 и др.
25
26. Погрешности винтовой передачи.
• Теоретическая ФП винтовогомеханизма –линейная,т.е. - нет схемной
погрешности!
• Причины погрешности ВМ технологические и эксплуатационные.
26
27. Погрешности ВМ.
Кинематические погрешности проявляются в том,что действительное линейное перемещение
гайки не пропорционально углу поворота винта
и передаточное отношение не постоянно.
При изменении направления движения и изменении
направления сил в ВМ возникает мертвый ход
ПРИЧИНЫ ПОГРЕШНОСТЕЙ:
• Кинематические: из-за погрешностей
изготовления деталей винтового механизма - в
основном погрешности шага Р.
• Мертвый (обратный) ход - из-за зазора между
профилем винта и гайки и упругих
27
деформаций.
28. Погрешности силовых ВМ.
Силовые погрешности проявляются в виде:Заеданий,
повышения нагрузки на привод вращения винта,
работа ВМ не плавная, с рывками.
Доп. Нелинейности ФП от силовых деформаций деталей
ВМ
• упругого мертвого хода.
ПРИЧИНЫ СИЛОВЫХ ПОГРЕШНОСТЕЙ:
• погрешности изготовления винта и гайки (неодинаковые
моменты трения в резьбе на разных участках),
• деформации элементов ВМ под действием нагрузки и под
собственным весом, (сжатие, изгиб и кручение винта,
упругое смятие зоны контакта винта и гайки).
• изменения сил трения в направляющих каретки,
28
соединенной с гайкой.
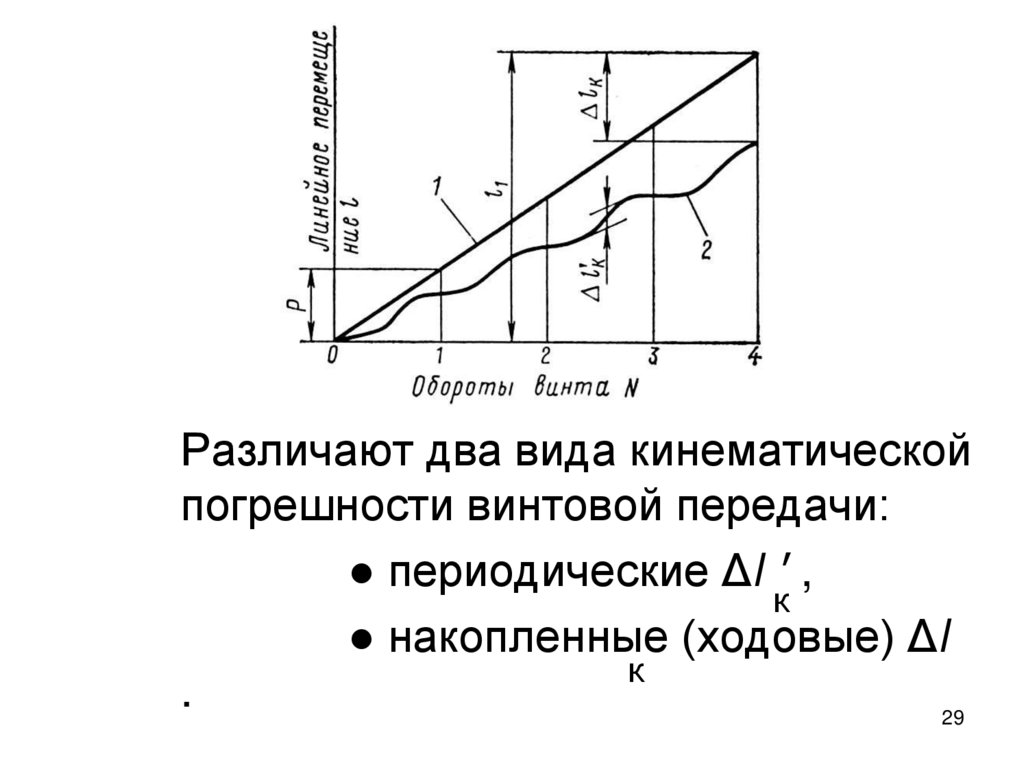
29.
Различают два вида кинематическойпогрешности винтовой передачи:
,
● периодические Δl ,
к
● накопленные (ходовые) Δl
к
.
29
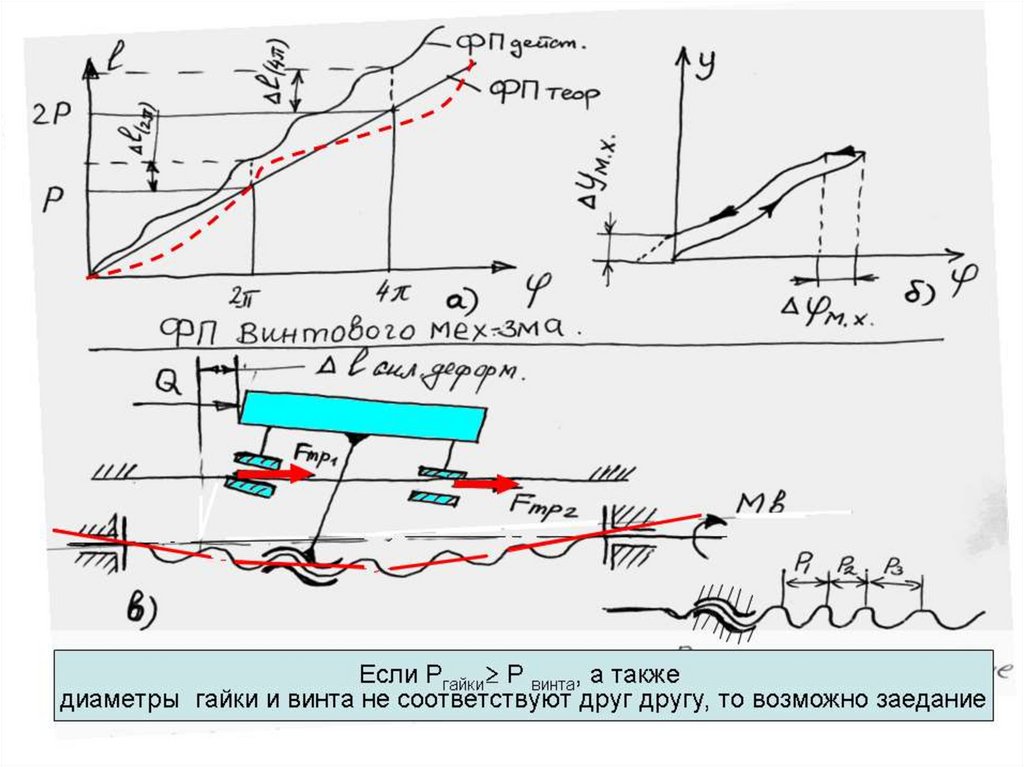
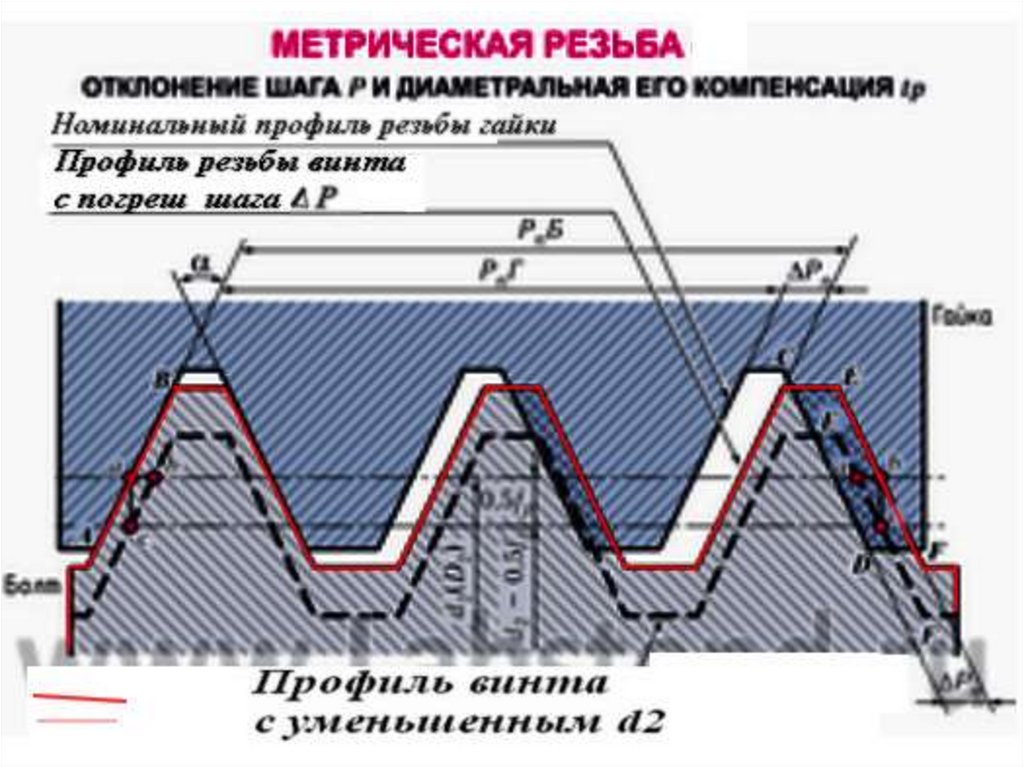
30.
Если Ргайки Р винта, атакжедиаметры гайки и винта не соответствуют друг другу, то возможно заедание
30
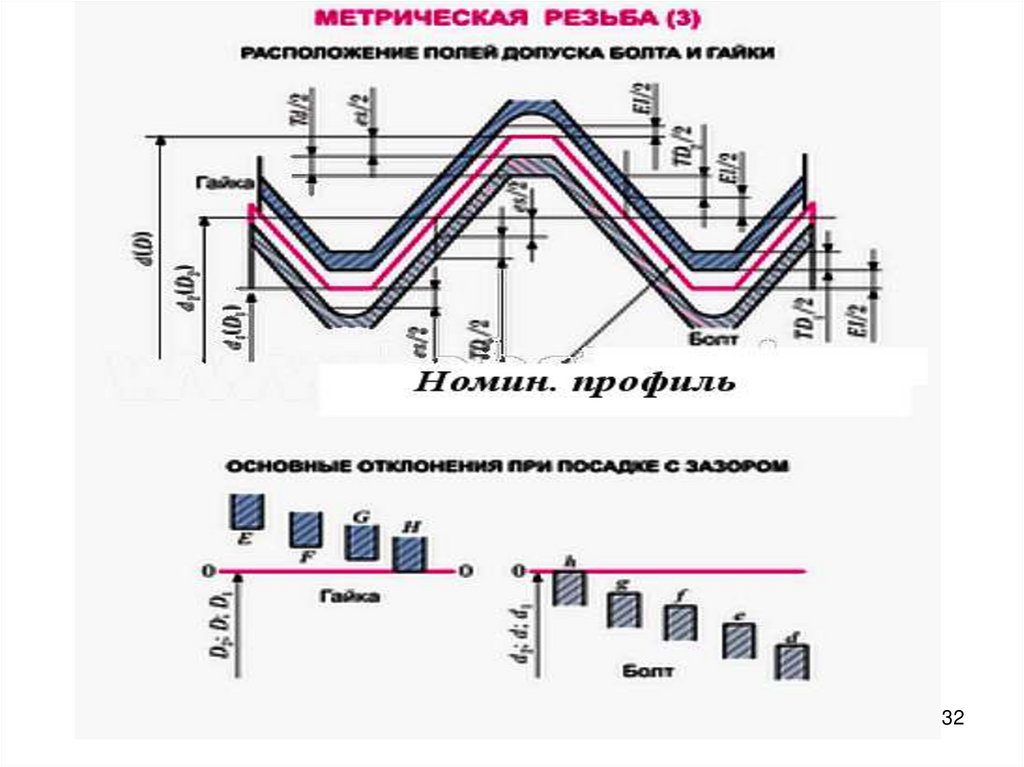
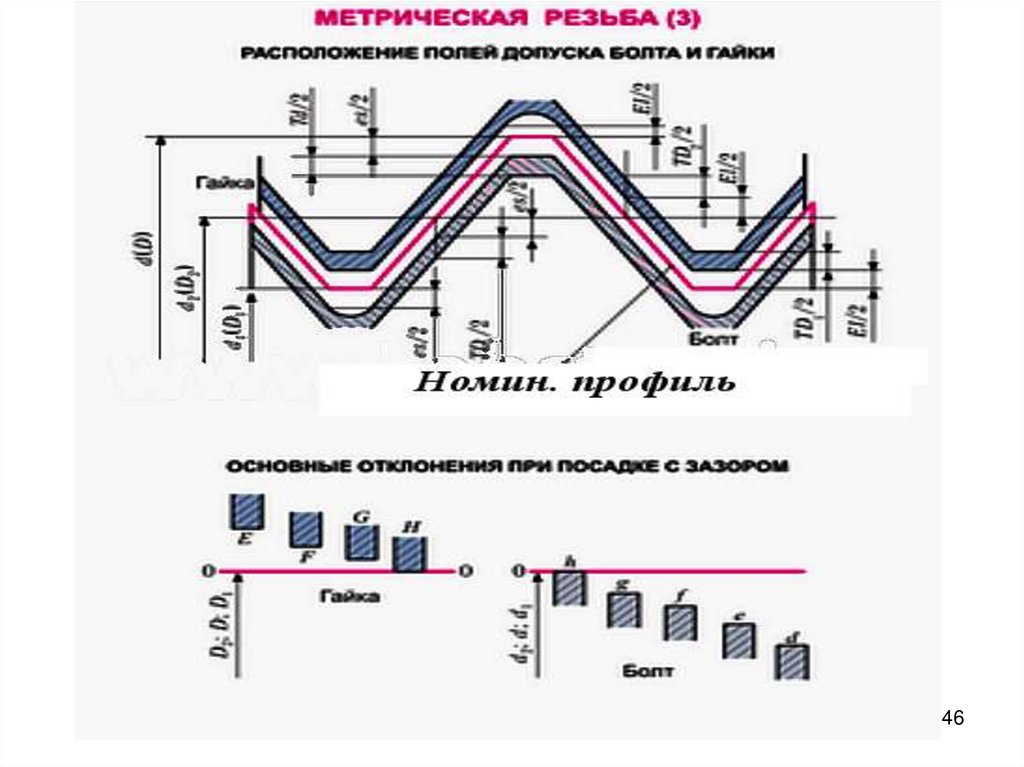
31. Зазор в резьбе ( на примере метрической /2 = 300)
Зазор в резьбе ( на примереметрической /2 = 300)
Для обеспечения свинчиваемости винтового
соединения
при
неизбежных
(из-за
погрешностей) различиях шага Р и угла
профиля резьбы винта и гайки создают
зазор в области среднего диаметра d2.
(Сред. диаметр винта d2 уменьшают, а
ср. диам. гайки D2- увеличивают на
величину диаметральной компенсации
погреш. Шага и угла)(см схемы далее..).
«Плата» за это – зазор и мертвый ход в
винтовом ПМ.
31
32.
3233.
3334.
3435.
Расчёты прочности винтапроводятся, в основном, для силовых ВМ.
Допустимые величины осевой нагрузки соответственно для растяжения и сжатия:
или
где: Q – сила, действующая вдоль оси винта, Н;
[σ р ] – допустимое напряжение растяжения, Па;
[σ ] –допустимое напряжение сжатия, Па;
сж
d - внутренний диаметр резьбы винта, мм.
1
35
36.
Откуда:или
где: Q = (1,3…1,4) Q – фиктивная нагрузка
п
Длина гайки:
Число витков гайки из условия прочности:
где : Е – модуль упругости.
5
для бронзы Е = (75…125) 10 Па.
36
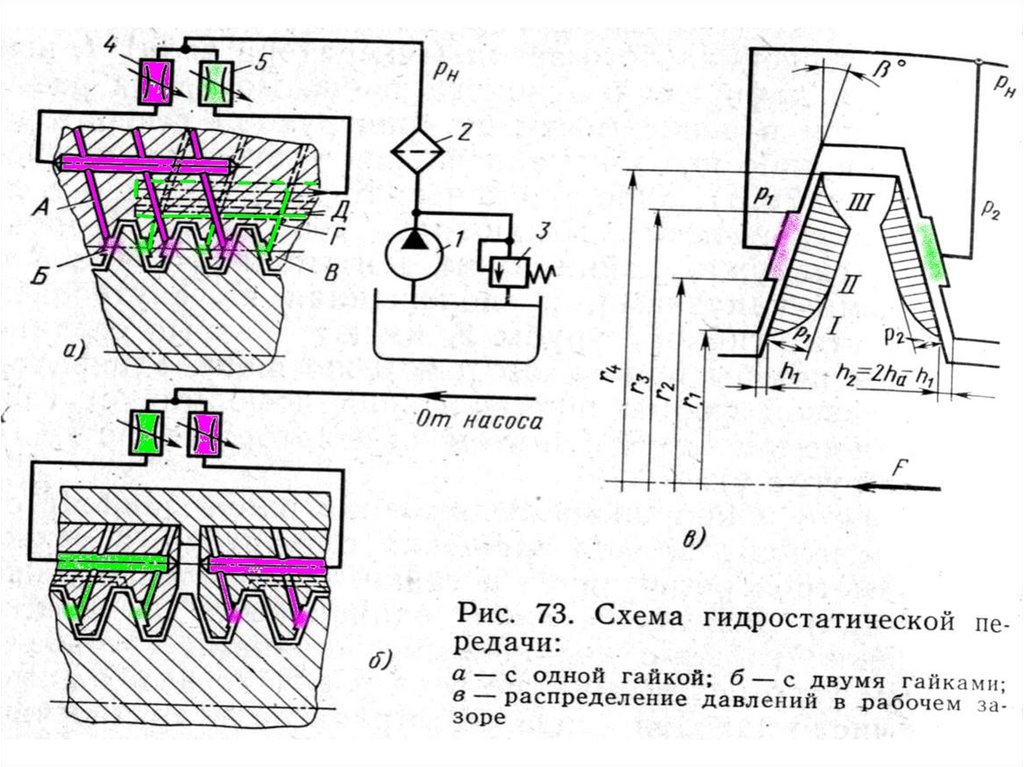
37. Распределение нагрузки в резьбе
3738.
3839. Дифференциальный ВМ
В дифференциальной винтовой передаче винт 1 имеет дверезьбы с разными шагами р1 и р2 одного направления
(правого или левого).
При вращении винта 1 гайка 2 совершает два
поступательных движения: переносное движение вместе
с винтом 1 относительно стойки 3; движение
относительно винта1. В связи с этим полное
поступательное перемещение Lдифф гайки 2 относительно
стойки 3
Lдифф = ( 1Р1 - 2Р2)/(2 ),
где 1 — угол поворота винта 1 относительно стойки 5;
2 — угол поворота гайки 2 относительно винта 1.
Так как угол поворота гайки 2 в абсолютном движении равен
нулю, то 1 = - 2 = . С учетом этого
Lдифф = (р1-р2) / (2 ).
39
40. Дифференциальные ВМ
Из формулы Lдифф = (р1-р2)/(2 ) следует,что дифференциальная винтовая
передача обеспечивает малые
линейные перемещения, меньшие,
чем с применением существующей
стандартной «мелкой» метрической
резьбы. (0,25спец., 0,5; 0,75мм)
Например,
ЕСЛИ р1 - р2 = 0,8 - 0,75 = 0,05 мм, ТО
перемещение в механизме
за оборот
винта составит Lдифф =0,05 мм.
40
41. К вопросу о чувствительности механизмов перемещений и применении Диф.ВМ
Угол поворота винта связан сперемещением S, жестко закрепленного
на нем
маховичка или отсчетного
барабанчика радиусом r зависимостью
S = r . Экспериментально установлено,
что наименьший угол поворота
винта, ощутимый оператором, при
диаметре барабанчика 2r = 20...50 мм
равен = 0,5...1°. Следовательно,
винтовая передача с однозаходной
резьбой z = 1 с шагом р = 0,5 мм при =
0,5° дает L min = 0,0007 мм.
В дифференциальной винтовой передаче
при z = 1, = 0,5° с резьбами p1 = 0,5
мм, р2 = 0,6 мм
Lдифф min = 0,00014 мм.
S= r
r
41
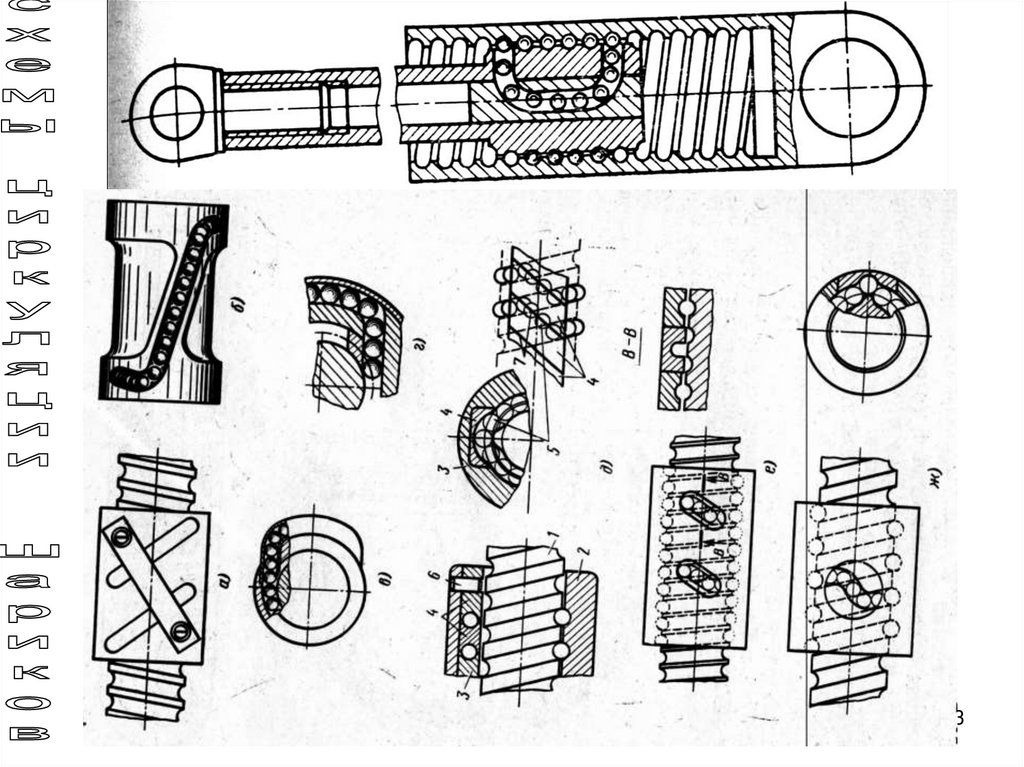
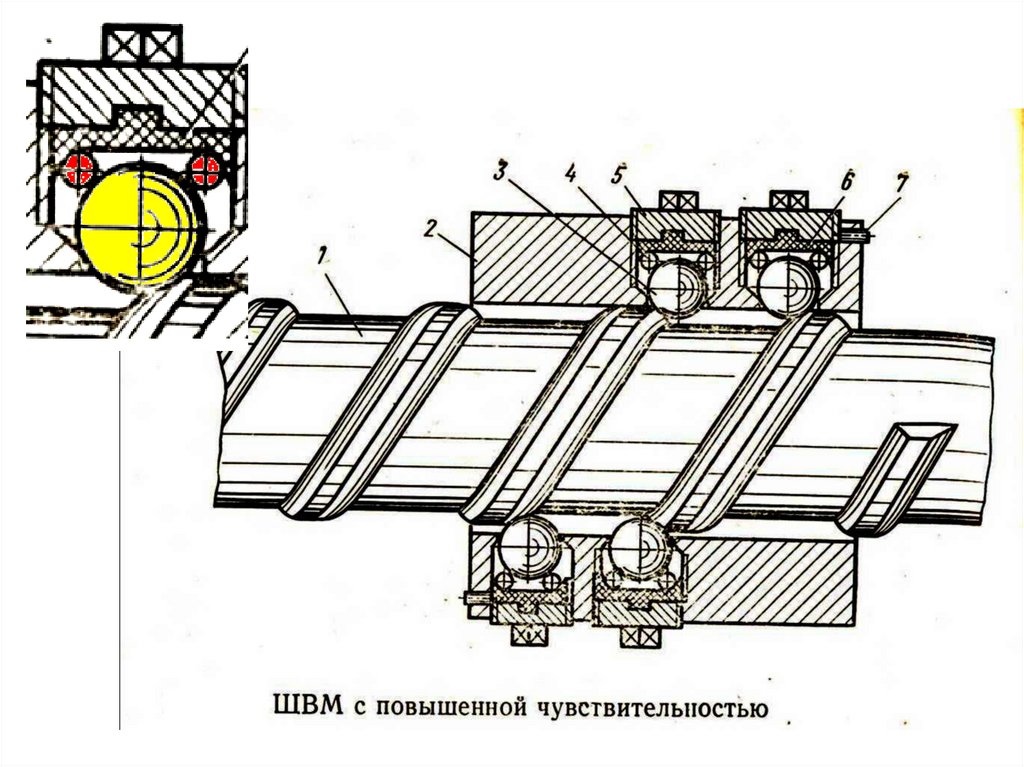
42. Шариковые ВМ
Трение скольжение заменено трением качения.Шарики (ролики) выполняют роль
промежуточных тел качения между винтом и
гайкой, образуя высшие кинематические пары.
(+++)Высокий КПД, малый износ, возможность
создания натяга в паре винт-гайка как в
радиальном , так и в осевом направлении- это
позволяет полностью?!! устранить мертвый ход.
(---) сложность конструкции (рециркуляция шариков
по спец. каналам), стоимость изготовления,
большие габариты (dв min = 12,7 мм).
Рециркуляцию шариков организуют в основном в
теле гайки, редко в теле винта.
42
43.
4344.
4445. Мертвый ход в ВМ и его устранение.
Зазоры по сопрягаемым поверхностям винта и гайкиприводят к мертвому ходу в винтовой передаче,
когда при изменении направления движения
ведущего звена перемещение ведомого звена
начинается только после поворота механизма на
угол, соответствующий выборке зазора.
Для уменьшения мертвого хода точные винтовые
передачи
приборов
и
машин
снабжают
устройствами,
обеспечивающими
выборку
бокового зазора в резьбе.
Различают два способа выборки бокового
зазора — радиальный и осевой
При радиальном способе обеспечивается сжатие
гайки в поперечном направлении относительно
винта (для треугольной и трапециидальной
резьб).
При осевом способе — смещение гайки или ее витков
относительно винта в осевом направлении (подходит
45
для всех видов резьб)
46.
4647. К радиальному методу уменьшения мертвого хода.
Сравним метрическую (а) и трапециидальную (б) резьбу.При одинаковом значении нормальной составляющей бокового
зазора Sn радиальные составляющие бокового зазора Sp
значительно отличаются: больше у трапецеидальной и меньше
для метрической резьбы.
Сжимать гайку для устранения бокового зазора для трапециидальной
резьбы нужно больше, чем для метрической.
47
48.
42
1
1
3
2
48
49.
На схеме 1 показано устройство, в котором выборка осевойсоставляющей бокового зазора осуществляется
поворотом гайки 2, при этом обеспечивается
одновременный контакт правых и левых профилей
резьбы винта 1 и гаек 2 и 3 при сжатии витков винта.
На схеме 2 пружина 5 отжимает гайку от корпуса,
обеспечивая двухпрофильный контакт резьбы винта с
резьбами гайки и корпуса. Устройства в целом можно
рассматривать как сложные, составные гайки.
2
1
49
50. Устранение м.х. в винтовой передаче осевым методом
5051.
• Устройства, обеспечивающие выборку радиальнойсоставляющей бокового зазора, представляют собой
разрезные гайки. Наиболее простая по конструкции
разрезная гайка (схема 3) со стягивающим винтом,
но она создает неравномерное обжатие винта и,
следовательно, вызывает неравномерный износ
резьбы гайки.
• В кинематических винтовых передачах для лучшей
выборки
мертвого
хода
и
равномерного
распределения радиальной силы по поверхности
винта на гайках выполняют разрезные цанги 1
(схема
4),
радиальное
сжатие
которых
обеспечивается вспомогательной гайкой 2 с
конической поверхностью, сжимающей цангу.
3
51