



 software
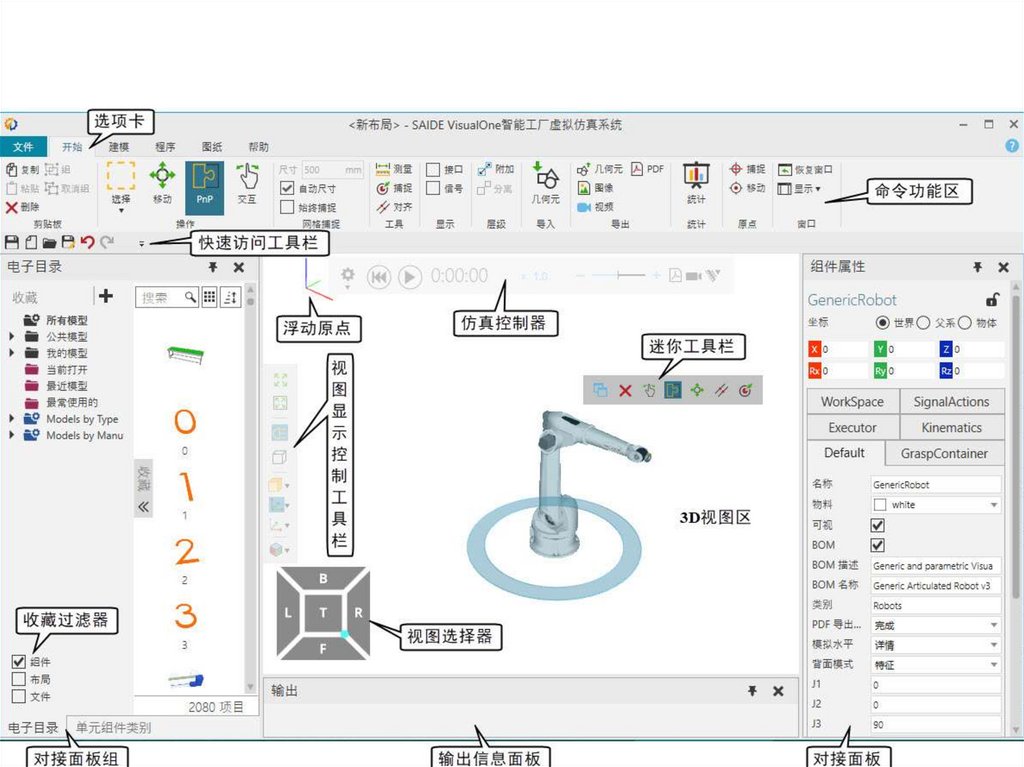
software工作界面介绍
1.
工作界面介绍2.
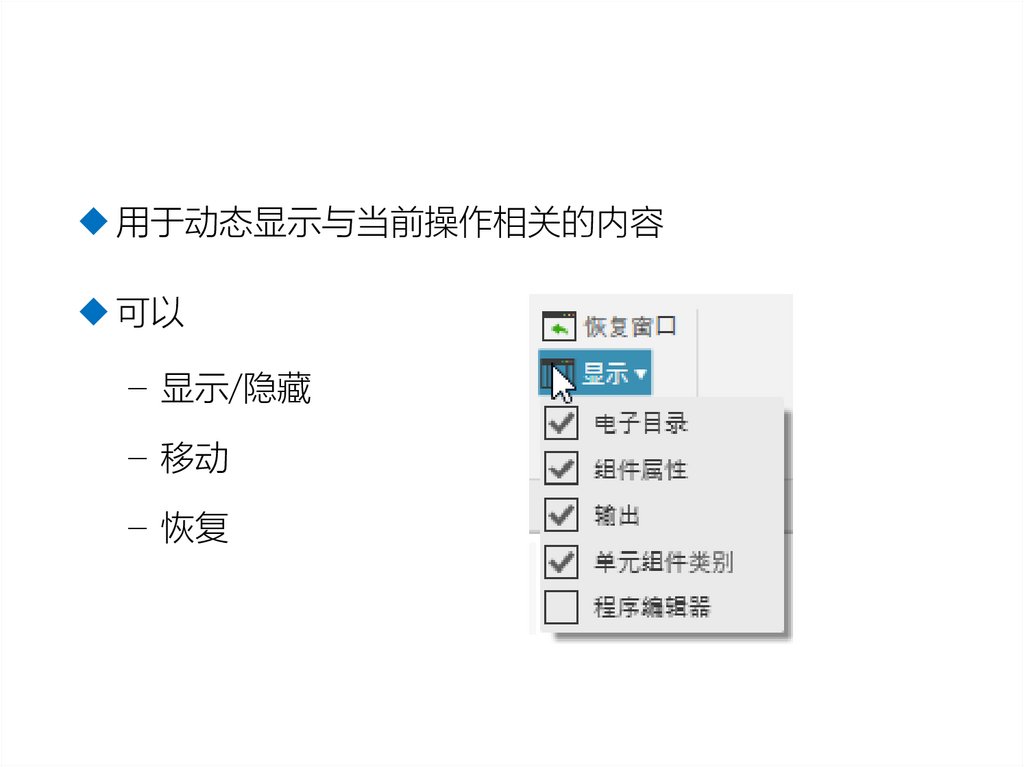
对接面板用于动态显示与当前操作相关的内容
可以
– 显示/隐藏
– 移动
– 恢复
3.
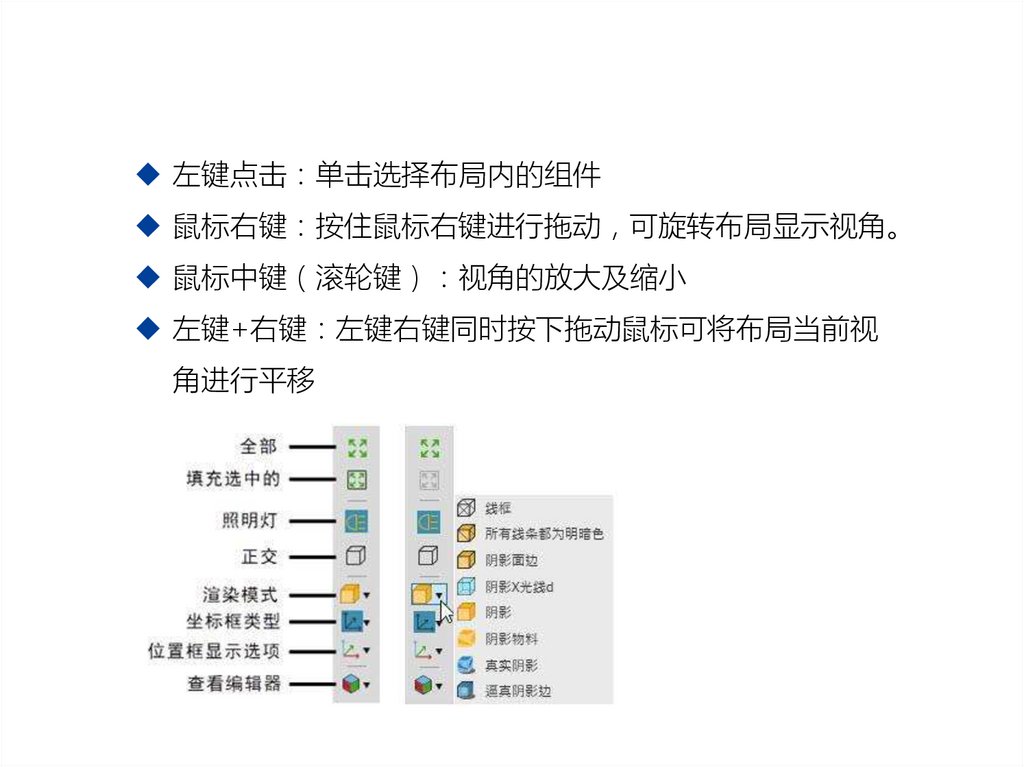
布局操作左键点击 单击选择布局内的组件
鼠标右键 按住鼠标右键进行拖动 可旋转布局显示视角。
鼠标中键 滚轮键 视角的放大及缩小
左键+右键 左键右键同时按下拖动鼠标可将布局当前视
角进行平移
4.
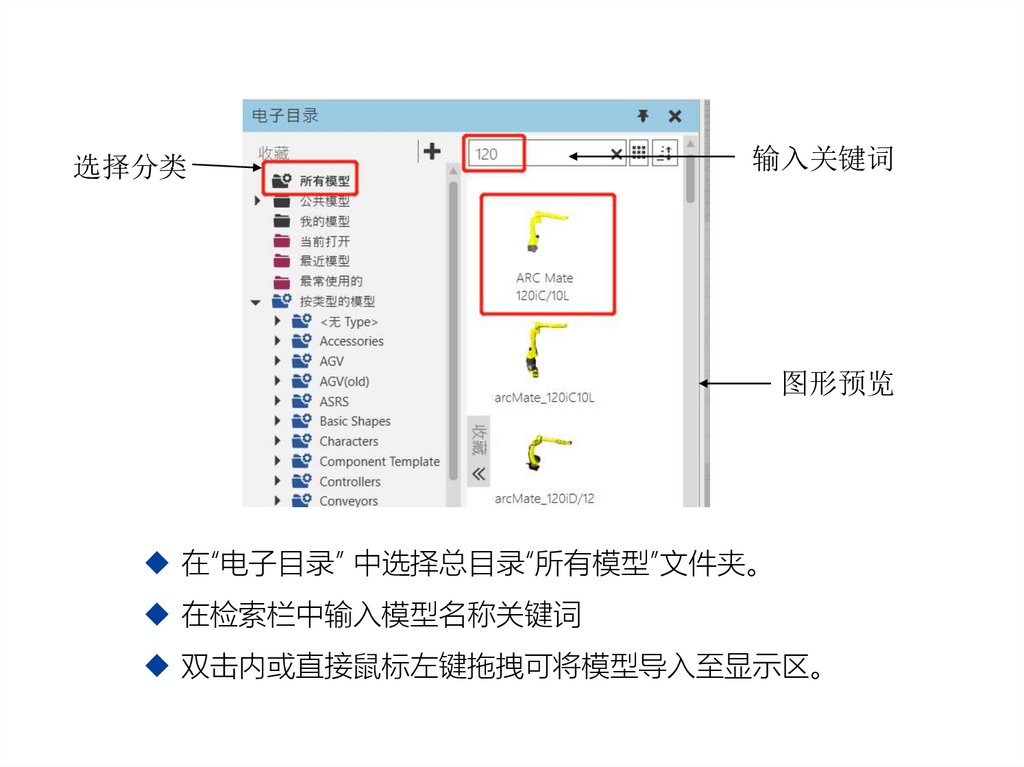
模型搜索导入选择分类
输入关键词
图形预览
在“电子目录” 中选择总目录“所有模型”文件夹。
在检索栏中输入模型名称关键词
双击内或直接鼠标左键拖拽可将模型导入至显示区。
5.
迷你工具栏当在3D视图中选择一个组件时 会短暂显示一个迷你工
具栏。
利用它可以快速执行诸如复制、删除、交互、PnP、移动、
对齐、捕捉等命令 加速布局的创建。
6.
模型搜索导入选择分类
输入关键词
图形预览
7.
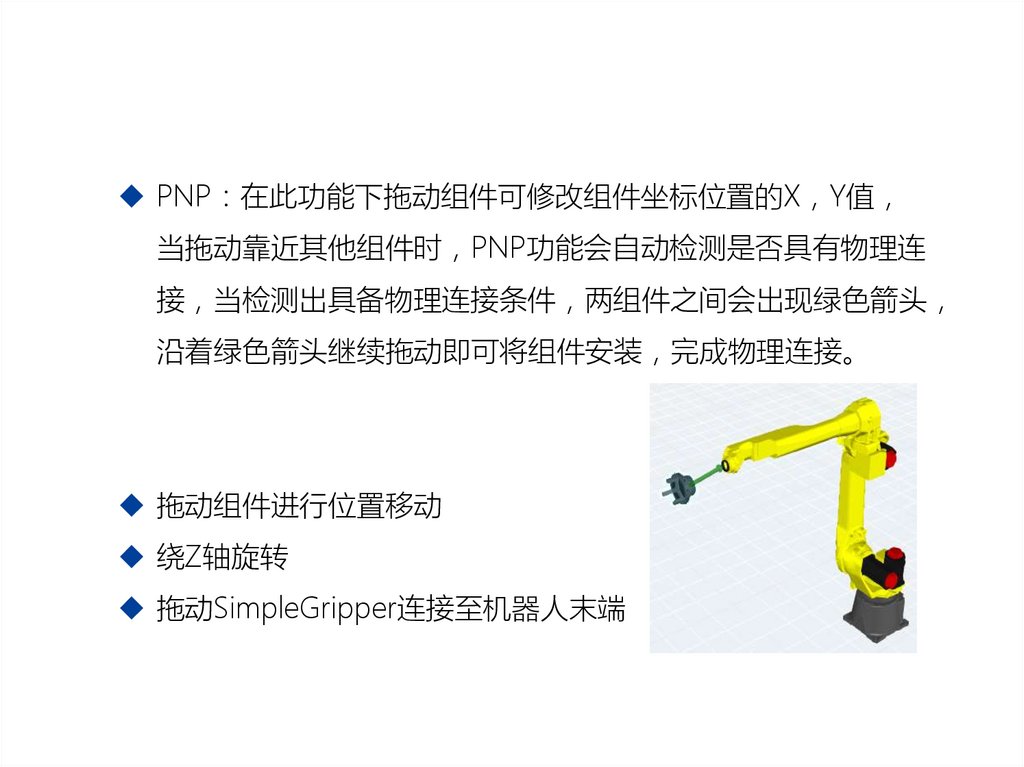
PNPPNP 在此功能下拖动组件可修改组件坐标位置的X Y值
当拖动靠近其他组件时 PNP功能会自动检测是否具有物理连
接 当检测出具备物理连接条件 两组件之间会出现绿色箭头
沿着绿色箭头继续拖动即可将组件安装 完成物理连接。
拖动组件进行位置移动
绕Z轴旋转
拖动SimpleGripper连接至机器人末端
8.
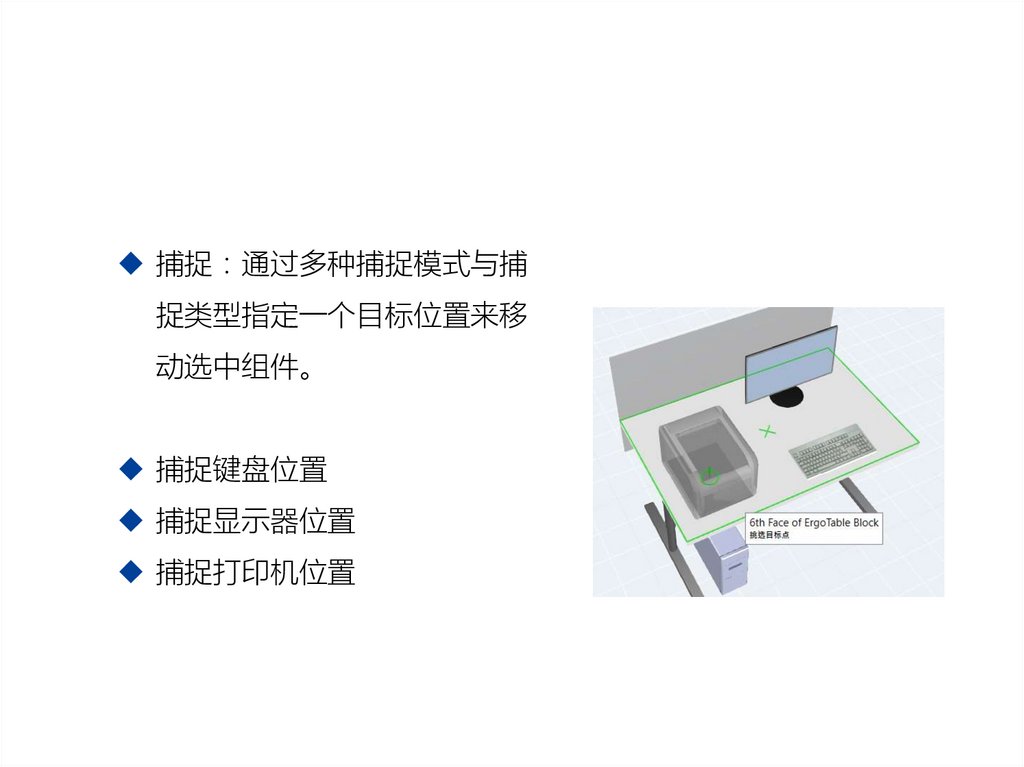
捕捉 这是一种定位方式捕捉 通过多种捕捉模式与捕
捉类型指定一个目标位置来移
动选中组件。
捕捉键盘位置
捕捉显示器位置
捕捉打印机位置
9.
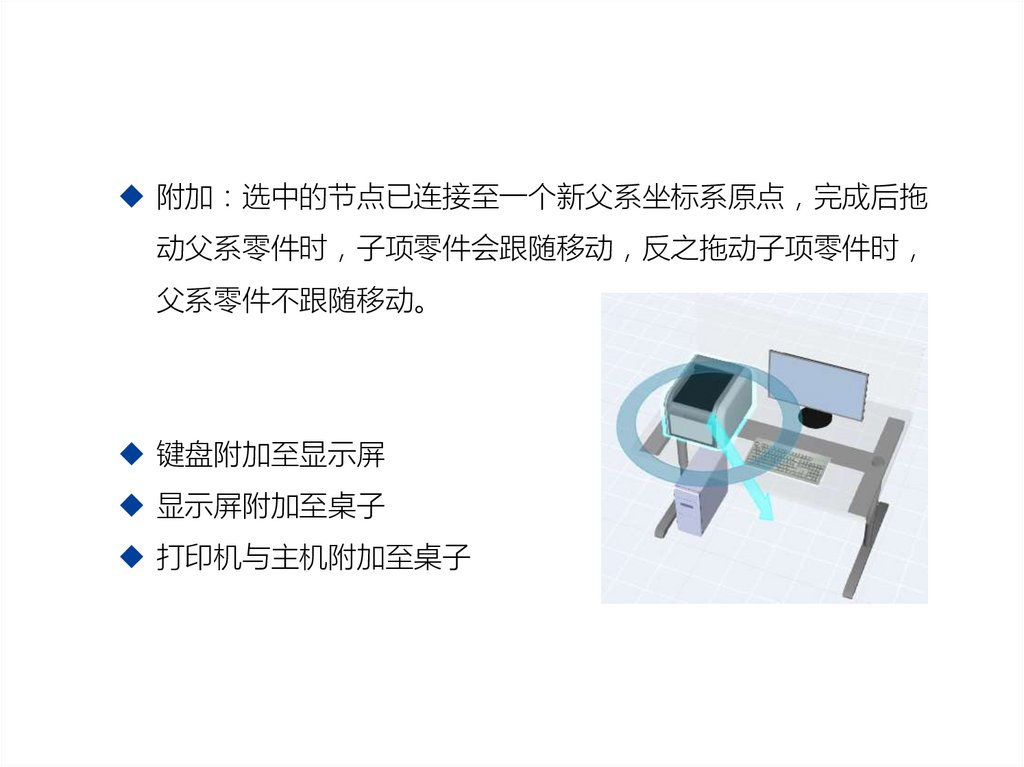
父子关系创建附加 选中的节点已连接至一个新父系坐标系原点 完成后拖
动父系零件时 子项零件会跟随移动 反之拖动子项零件时
父系零件不跟随移动。
键盘附加至显示屏
显示屏附加至桌子
打印机与主机附加至桌子
10.
问题解析PNP指令与移动指令哪个更适合于精细移动组件。
移动更适合于精细移动组件 移动指令可针对不同轴 不同
平面 不同角度进行更改设置 PNP主要应用与组件的简单移
动及组件物理连接
父子关系建立中在已建立的基础上是否可以再赋予新的主从关
系
可以赋予 可以在已赋予基础上再次添加主从关系 但一个
组件只能跟随一个主动件。
11.
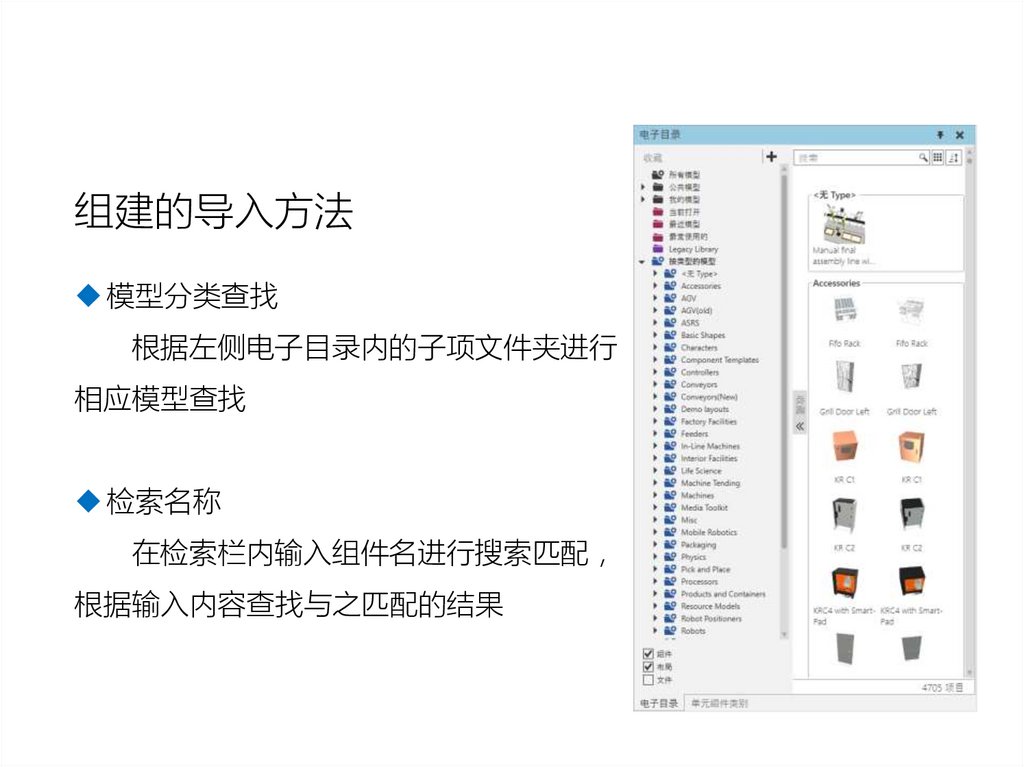
组件导入组建的导入方法
模型分类查找
根据左侧电子目录内的子项文件夹进行
相应模型查找
检索名称
在检索栏内输入组件名进行搜索匹配
根据输入内容查找与之匹配的结果
12.
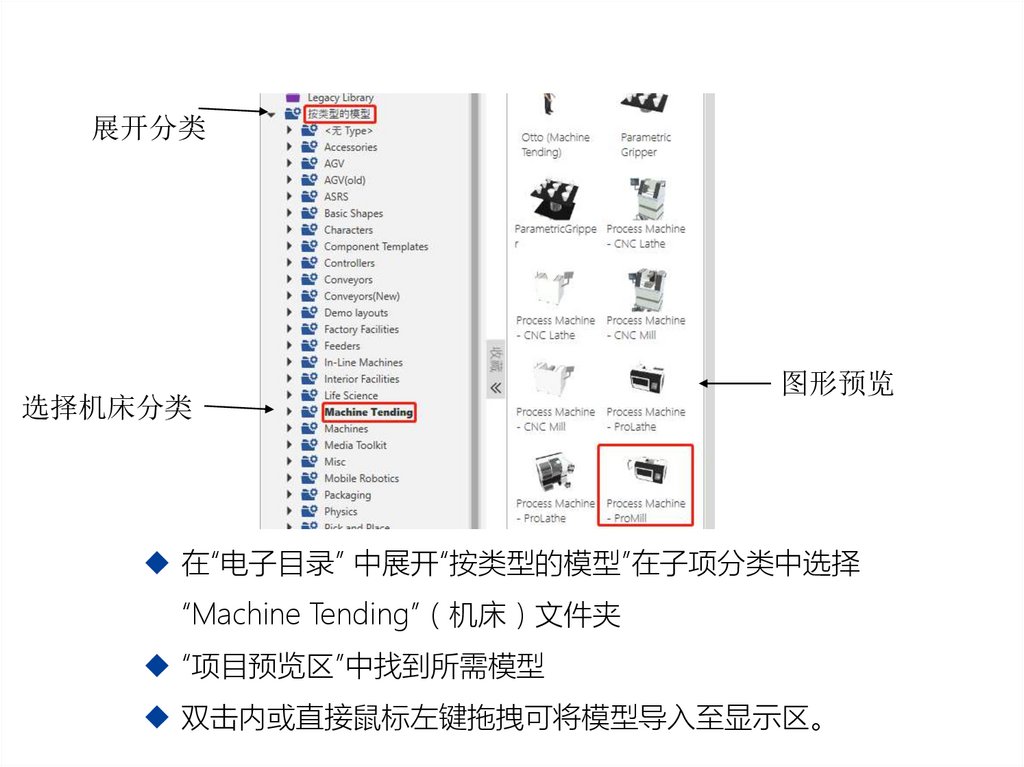
模型分类导入展开分类
选择机床分类
图形预览
在“电子目录” 中展开“按类型的模型”在子项分类中选择
“Machine Tending” 机床 文件夹
“项目预览区”中找到所需模型
双击内或直接鼠标左键拖拽可将模型导入至显示区。
13.
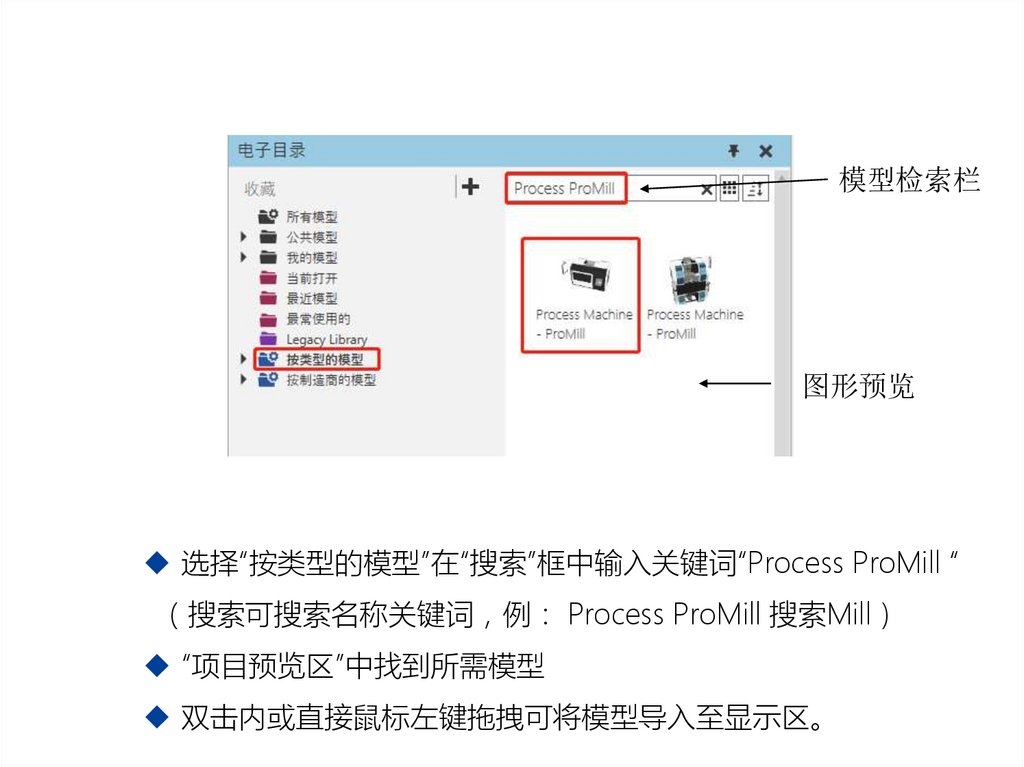
检索倒入模型检索栏
图形预览
选择“按类型的模型”在“搜索”框中输入关键词“Process ProMill “
搜索可搜索名称关键词 例 Process ProMill 搜索Mill
“项目预览区”中找到所需模型
双击内或直接鼠标左键拖拽可将模型导入至显示区。
14.
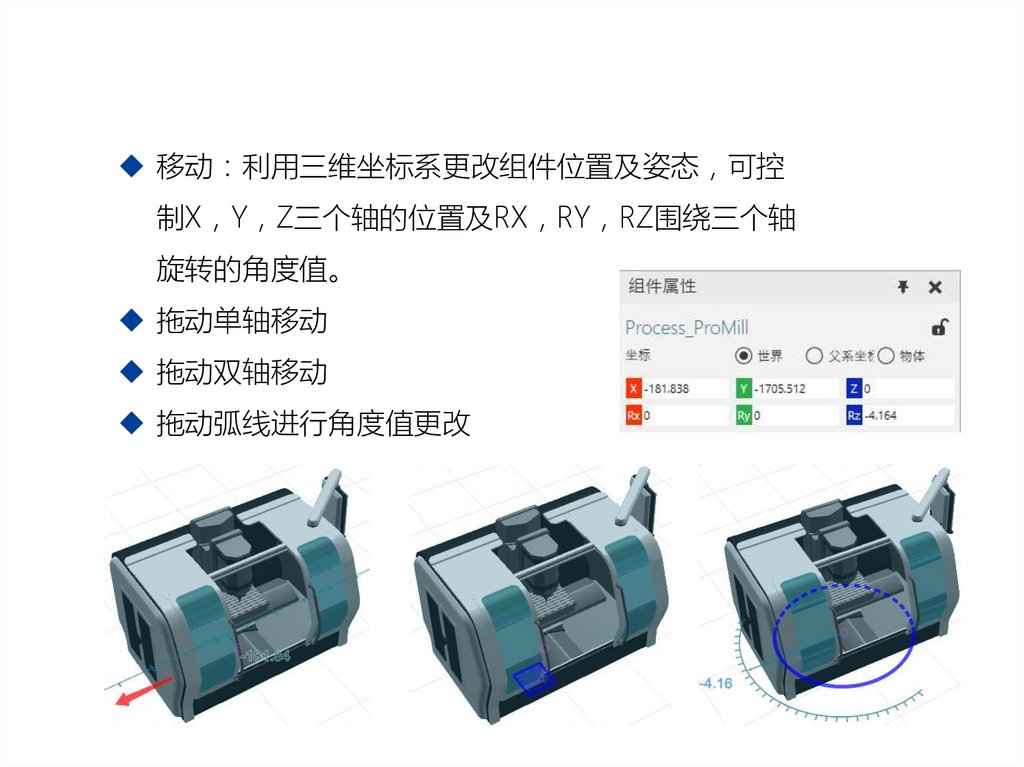
移动移动 利用三维坐标系更改组件位置及姿态 可控
制X Y Z三个轴的位置及RX RY RZ围绕三个轴
旋转的角度值。
拖动单轴移动
拖动双轴移动
拖动弧线进行角度值更改
15.
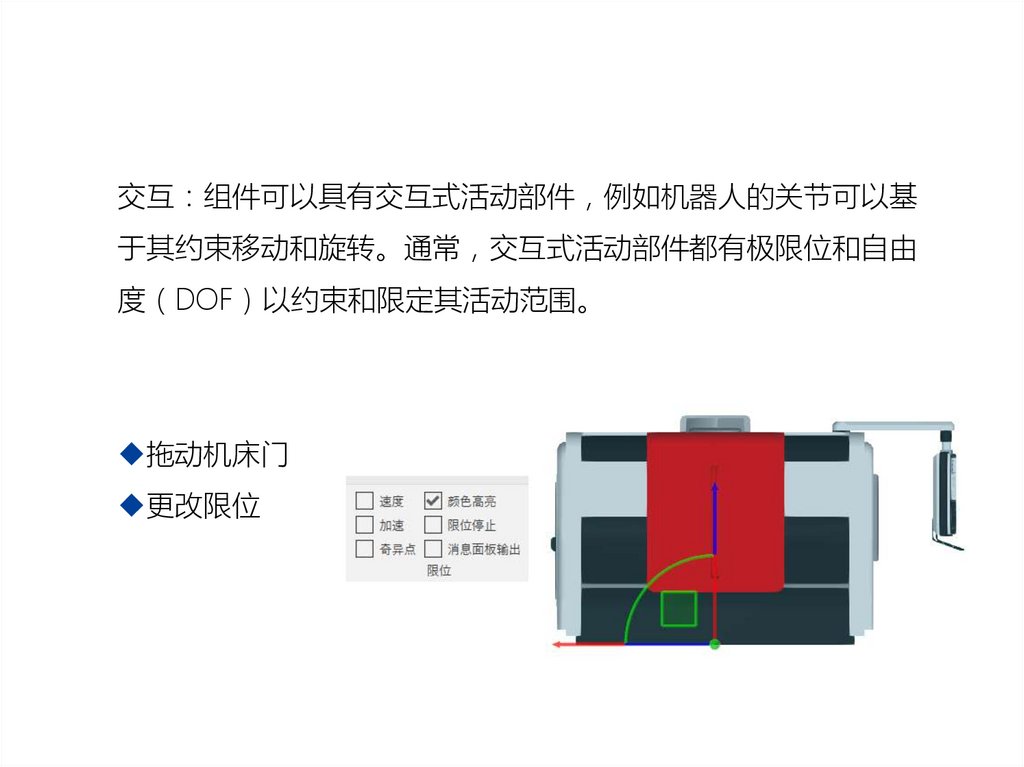
交互交互 组件可以具有交互式活动部件 例如机器人的关节可以基
于其约束移动和旋转。通常 交互式活动部件都有极限位和自由
度 DOF 以约束和限定其活动范围。
拖动机床门
更改限位
16.
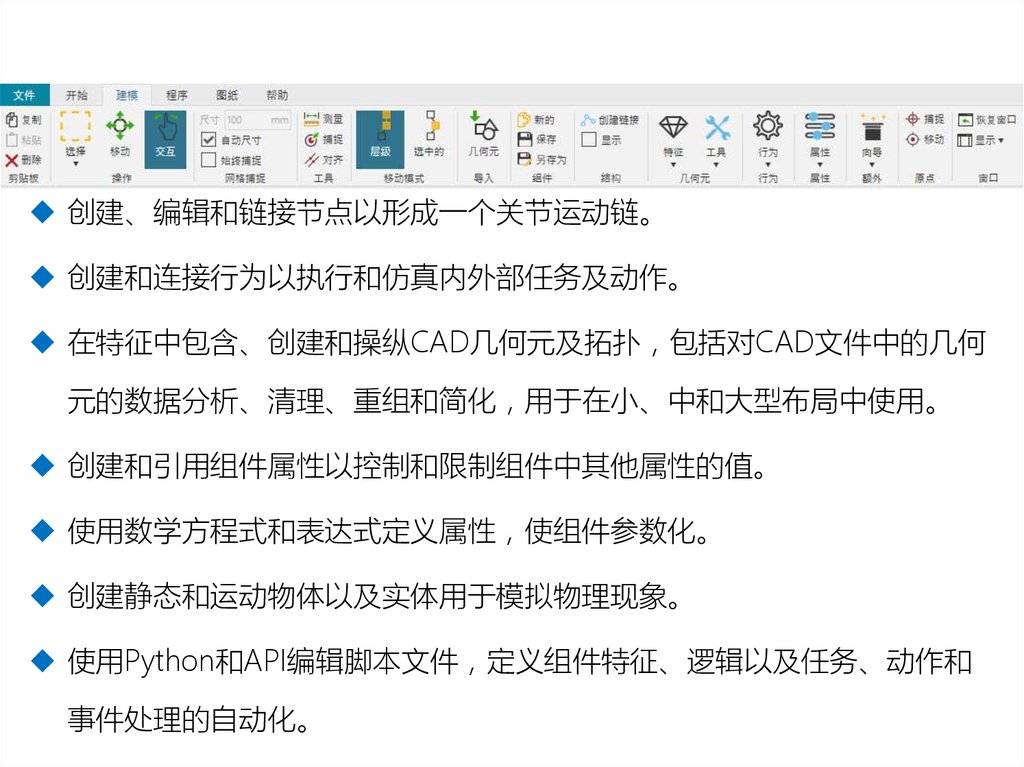
建模选项卡 建模视图创建、编辑和链接节点以形成一个关节运动链。
创建和连接行为以执行和仿真内外部任务及动作。
在特征中包含、创建和操纵CAD几何元及拓扑 包括对CAD文件中的几何
元的数据分析、清理、重组和简化 用于在小、中和大型布局中使用。
创建和引用组件属性以控制和限制组件中其他属性的值。
使用数学方程式和表达式定义属性 使组件参数化。
创建静态和运动物体以及实体用于模拟物理现象。
使用Python和API编辑脚本文件 定义组件特征、逻辑以及任务、动作和
事件处理的自动化。
17.
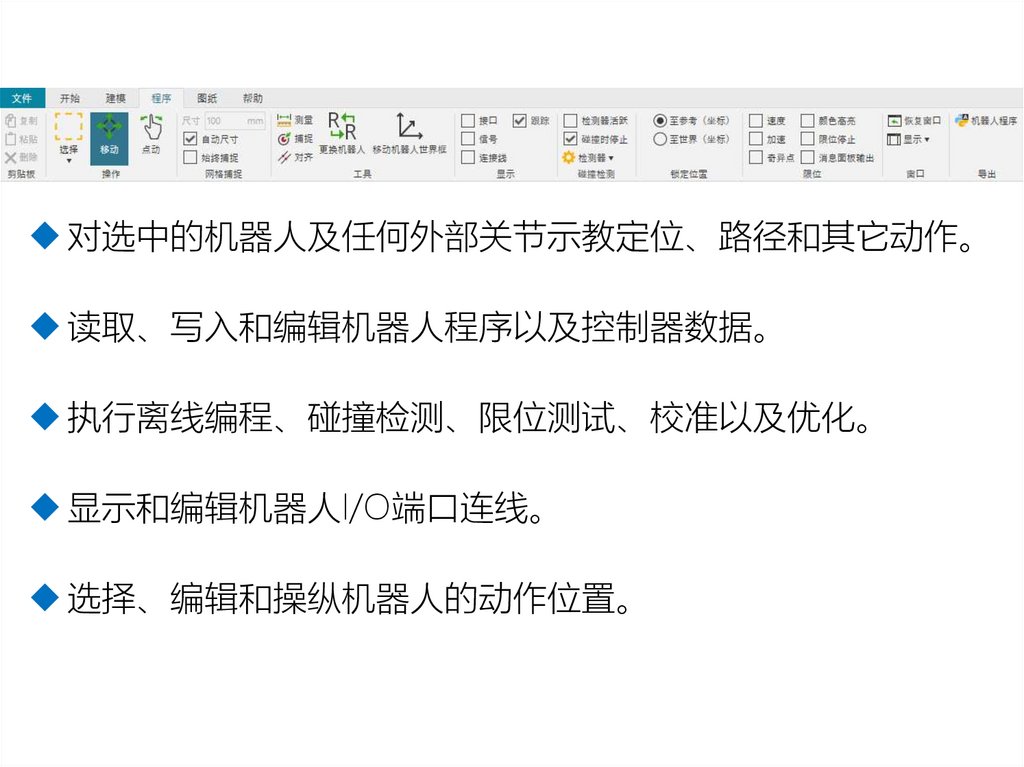
程序选项卡 机器人视图对选中的机器人及任何外部关节示教定位、路径和其它动作。
读取、写入和编辑机器人程序以及控制器数据。
执行离线编程、碰撞检测、限位测试、校准以及优化。
显示和编辑机器人I/O端口连线。
选择、编辑和操纵机器人的动作位置。
18.
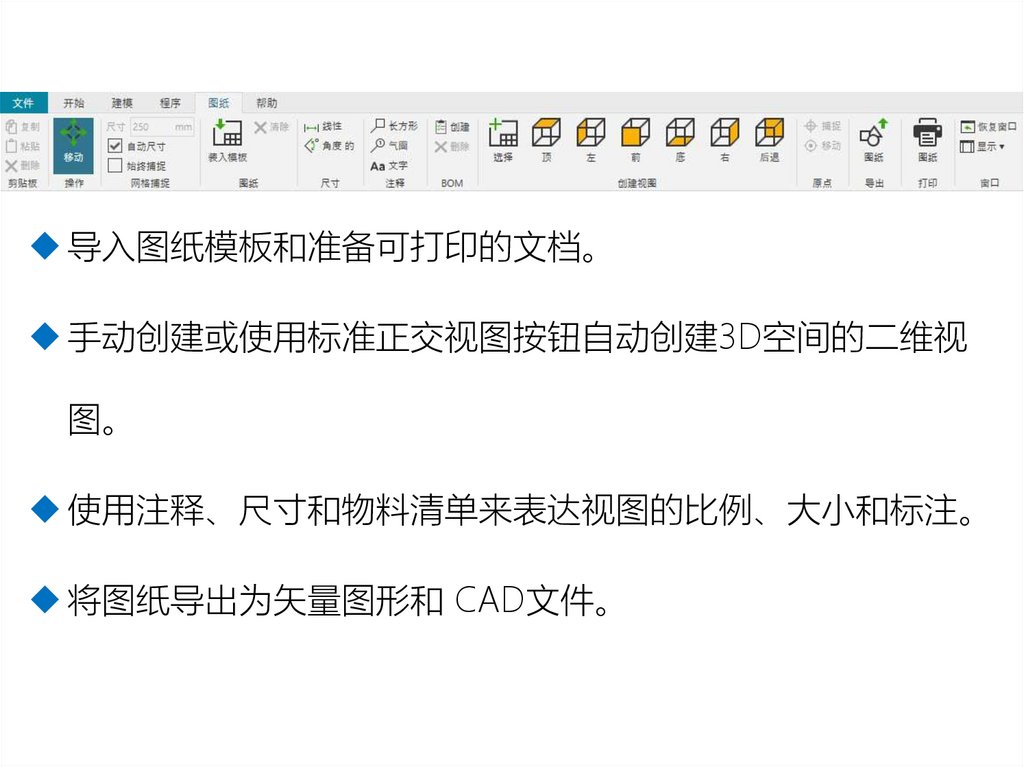
图纸选项卡 图纸视图导入图纸模板和准备可打印的文档。
手动创建或使用标准正交视图按钮自动创建3D空间的二维视
图。
使用注释、尺寸和物料清单来表达视图的比例、大小和标注。
将图纸导出为矢量图形和 CAD文件。
19.
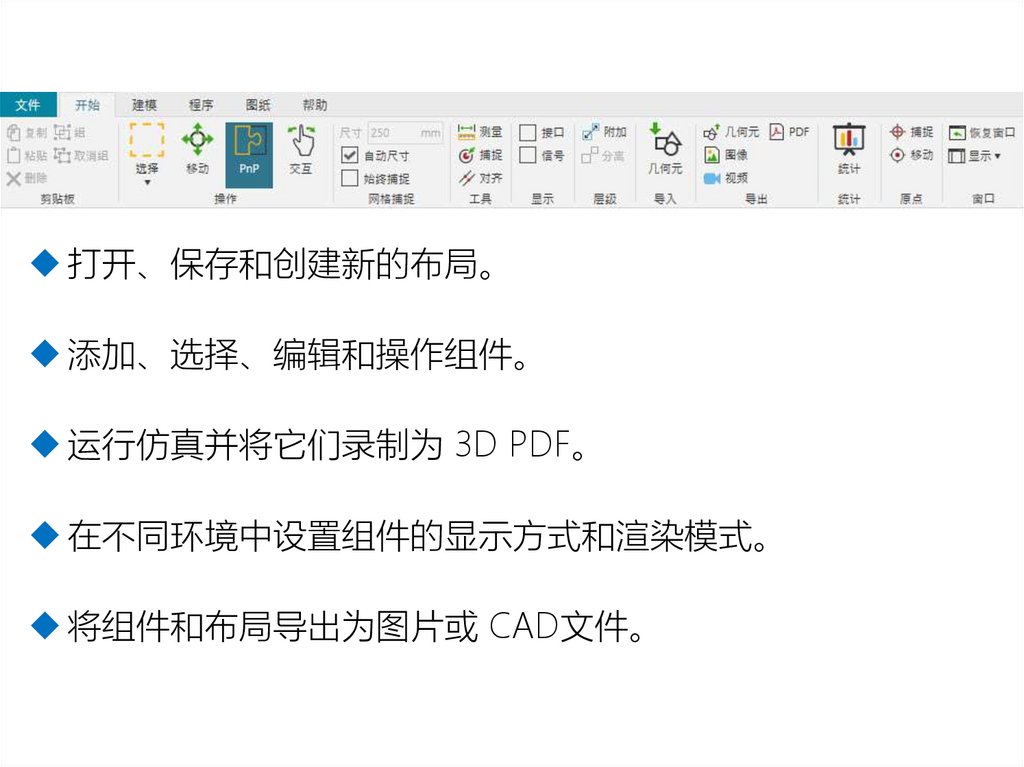
开始选项卡 布局视图打开、保存和创建新的布局。
添加、选择、编辑和操作组件。
运行仿真并将它们录制为 3D PDF。
在不同环境中设置组件的显示方式和渲染模式。
将组件和布局导出为图片或 CAD文件。
20.
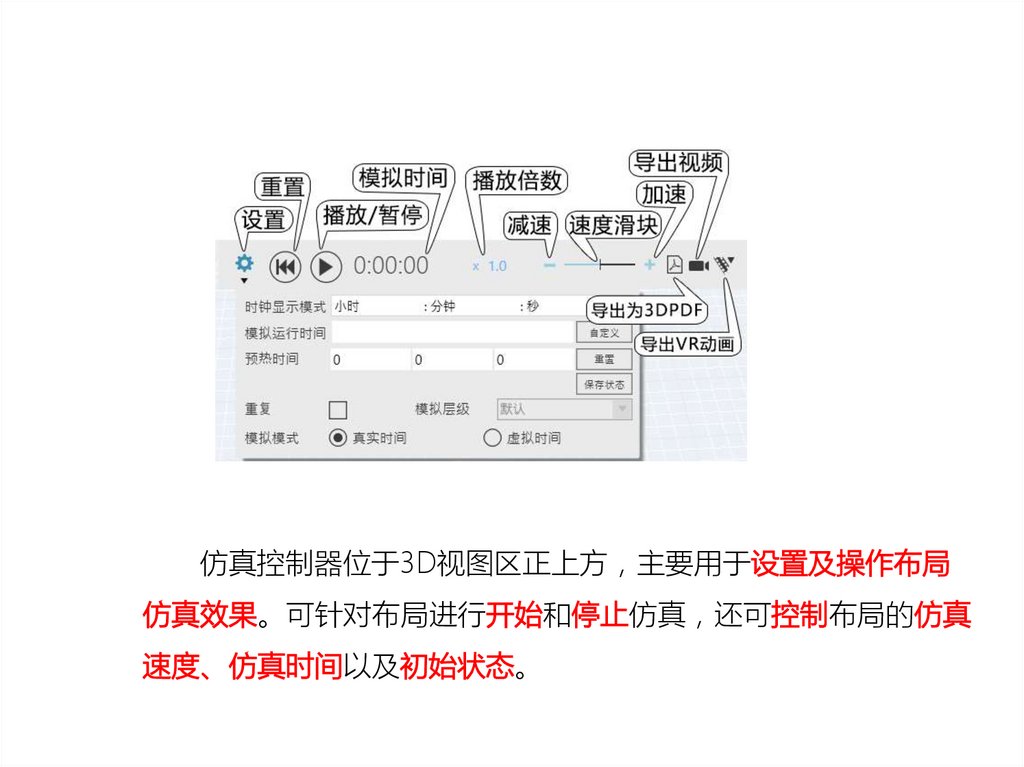
仿真控制器仿真控制器位于3D视图区正上方 主要用于设置及操作布局
仿真效果。可针对布局进行开始和停止仿真 还可控制布局的仿真
速度、仿真时间以及初始状态。
21.
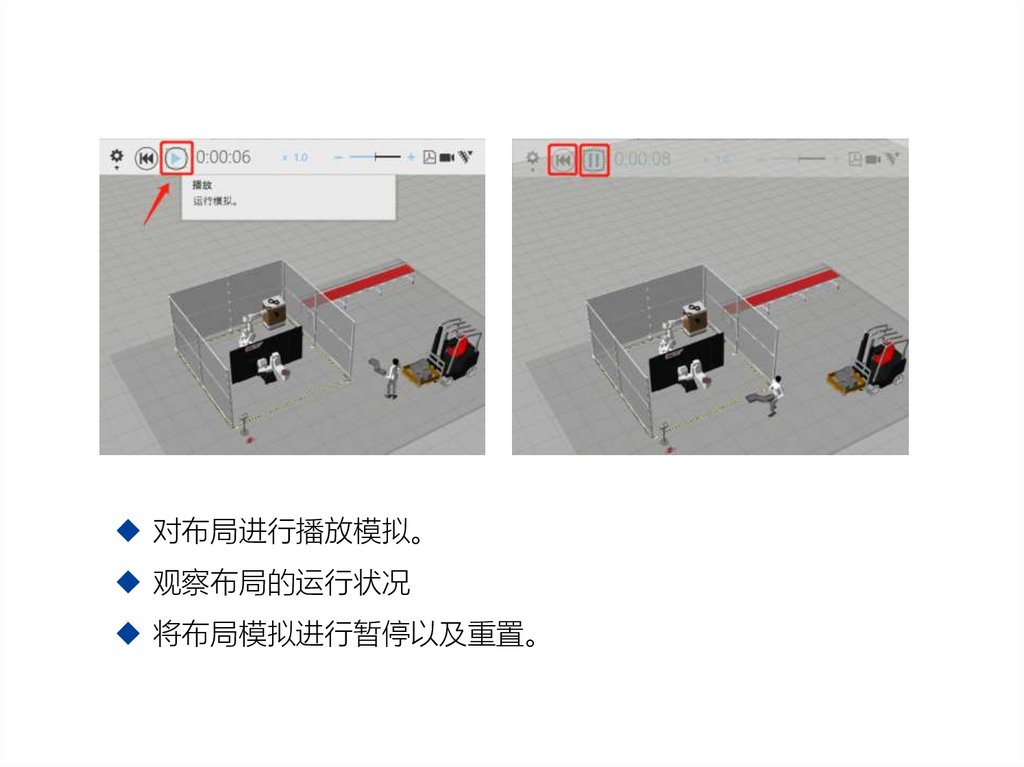
仿真控制器对布局进行播放模拟。
观察布局的运行状况
将布局模拟进行暂停以及重置。
22.
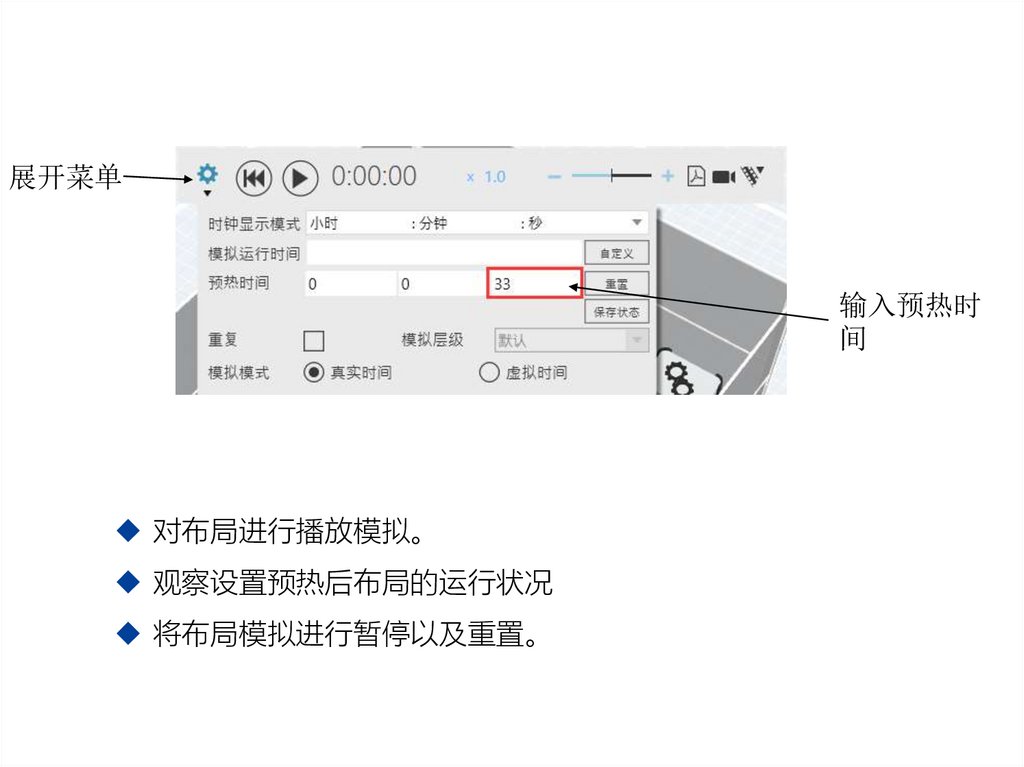
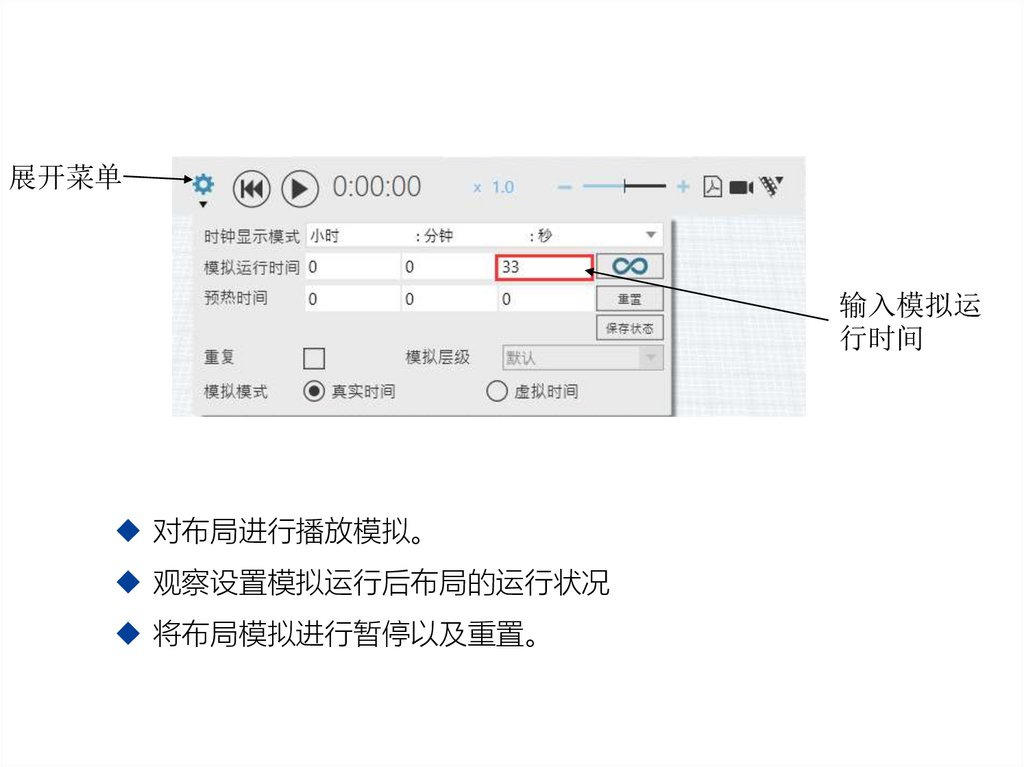
仿真控制器展开菜单
输入预热时
间
对布局进行播放模拟。
观察设置预热后布局的运行状况
将布局模拟进行暂停以及重置。
23.
仿真控制器展开菜单
输入模拟运
行时间
对布局进行播放模拟。
观察设置模拟运行后布局的运行状况
将布局模拟进行暂停以及重置。
24.
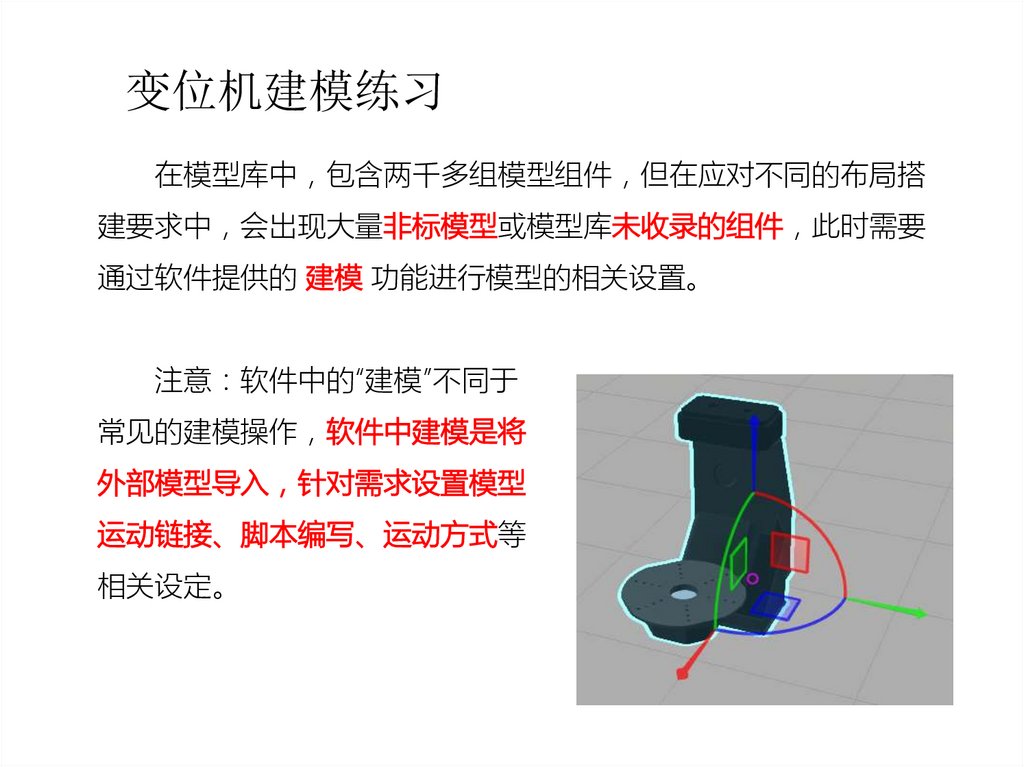
变位机建模练习在模型库中 包含两千多组模型组件 但在应对不同的布局搭
建要求中 会出现大量非标模型或模型库未收录的组件 此时需要
通过软件提供的 建模 功能进行模型的相关设置。
注意 软件中的“建模”不同于
常见的建模操作 软件中建模是将
外部模型导入 针对需求设置模型
运动链接、脚本编写、运动方式等
相关设定。
25.
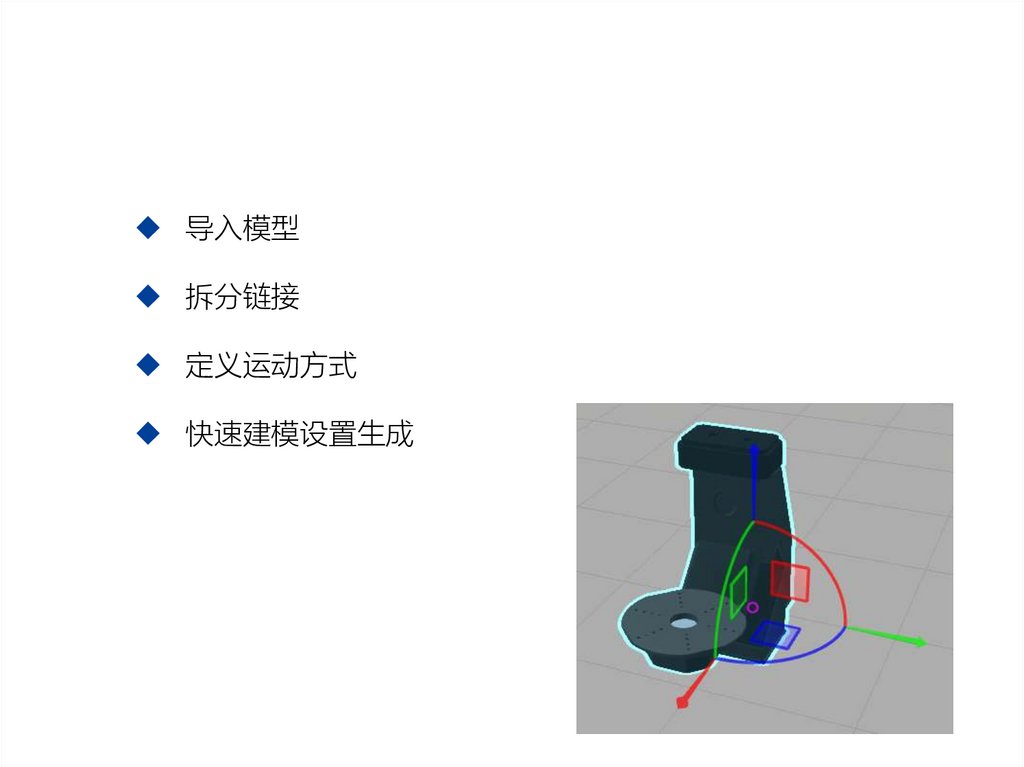
导轨建模导入模型
拆分链接
定义运动方式
快速建模设置生成
26.
模型的导入设置模型导入有两种方式 拖拽与参数设置两种方式
拖拽 将模型文件直接拖入3D显示区内
直接导入软件内 导入设置延续上一次的参数设置内容 若
无参数设置内容将按照默认进行导入
参数设置 通过“导入几何元”按钮进行操作
详细化将模型导入的设置进行罗列 其中包含特征树、模型
整理、轴方向等设置进行详细导入
27.
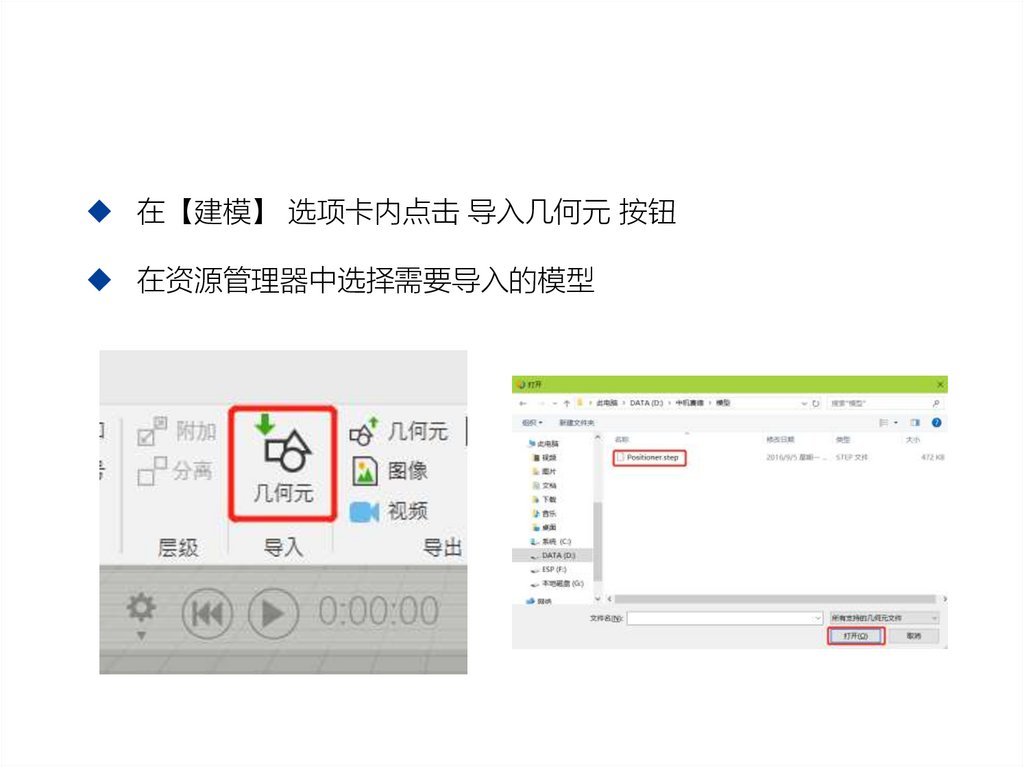
模型的导入设置在【建模】 选项卡内点击 导入几何元 按钮
在资源管理器中选择需要导入的模型
28.
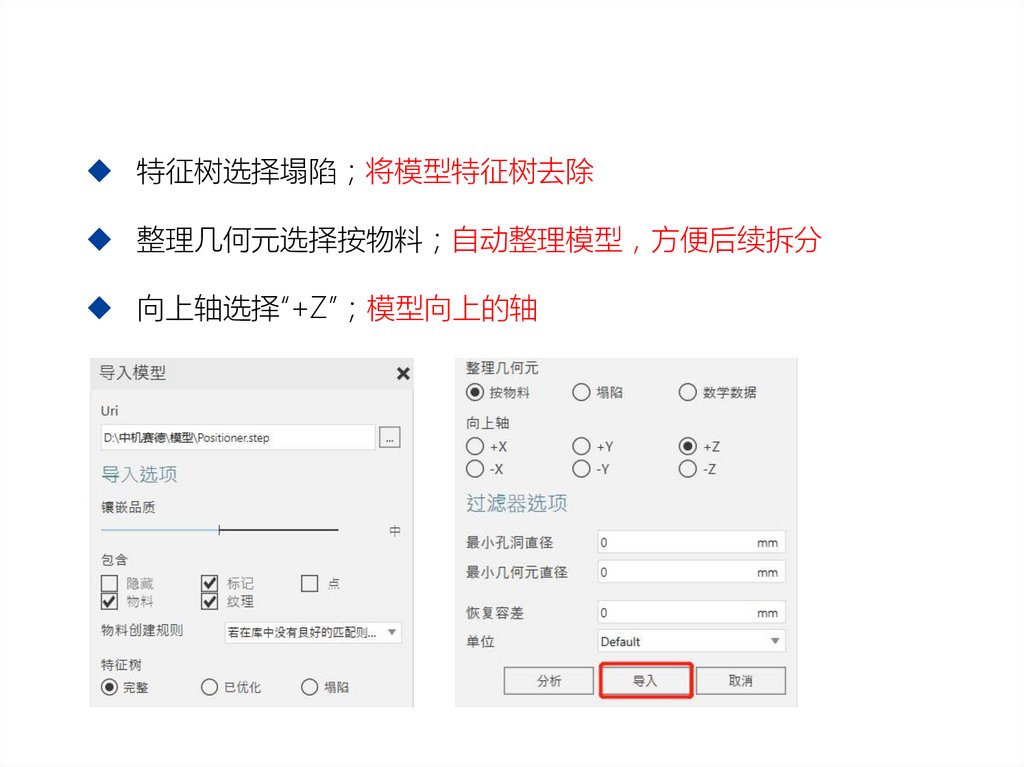
模型的导入设置特征树选择塌陷 将模型特征树去除
整理几何元选择按物料 自动整理模型 方便后续拆分
向上轴选择“+Z” 模型向上的轴
29.
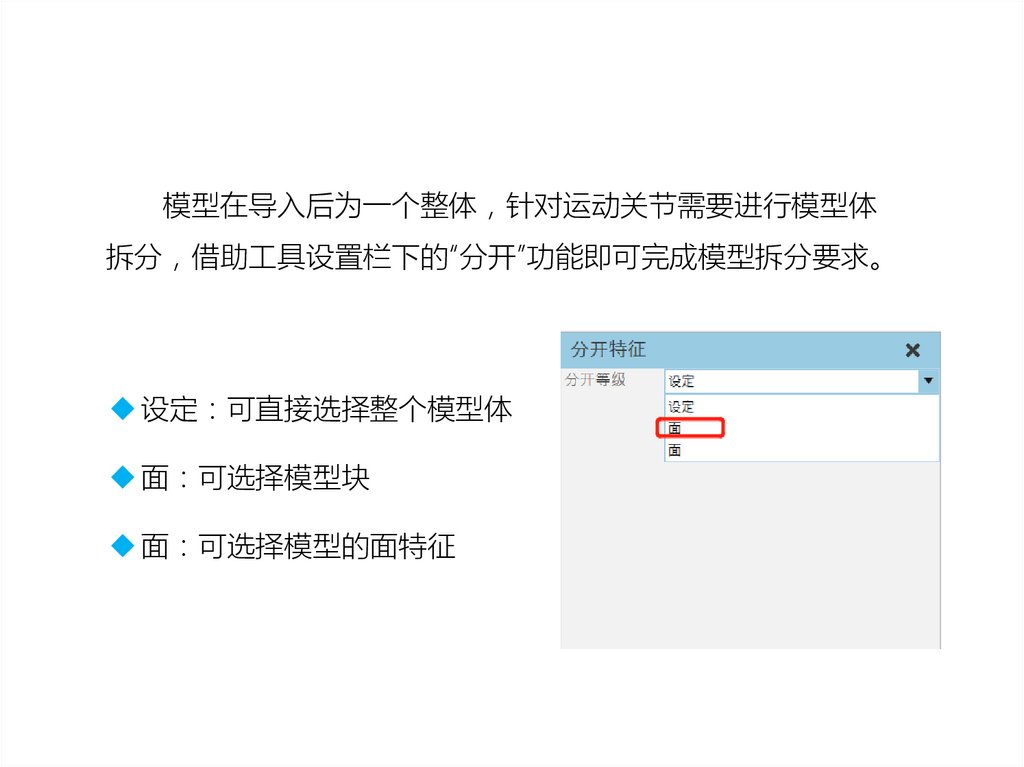
模型拆分模型在导入后为一个整体 针对运动关节需要进行模型体
拆分 借助工具设置栏下的“分开”功能即可完成模型拆分要求。
设定 可直接选择整个模型体
面 可选择模型块
面 可选择模型的面特征
30.
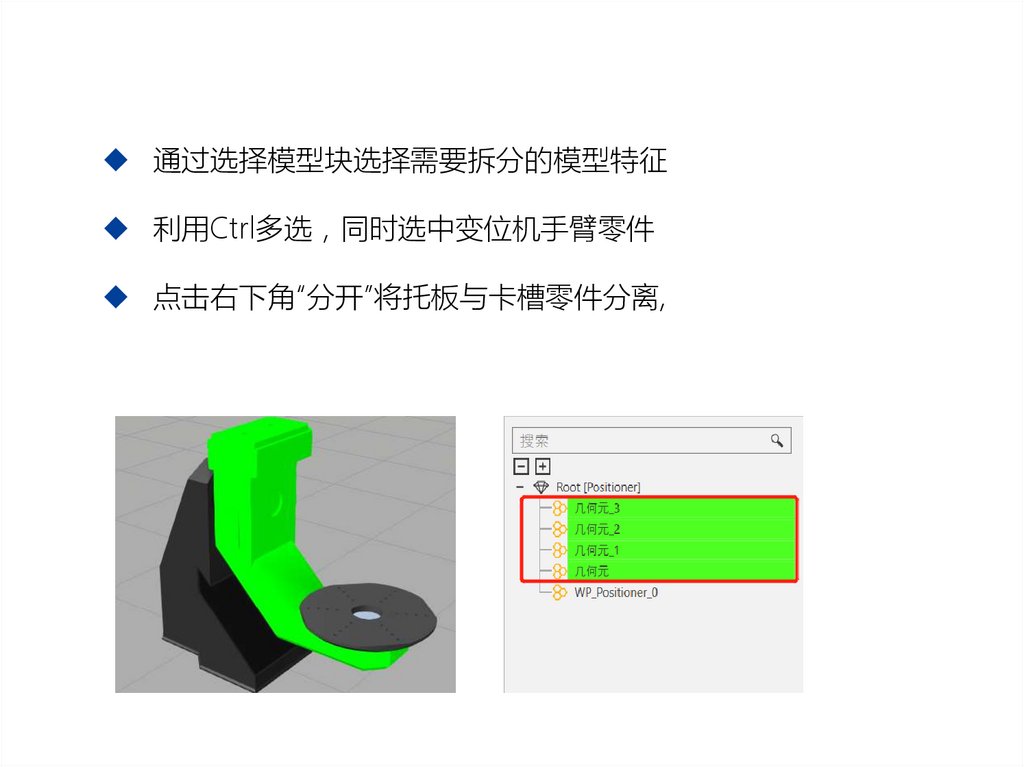
模型拆分通过选择模型块选择需要拆分的模型特征
利用Ctrl多选 同时选中变位机手臂零件
点击右下角“分开”将托板与卡槽零件分离,
31.
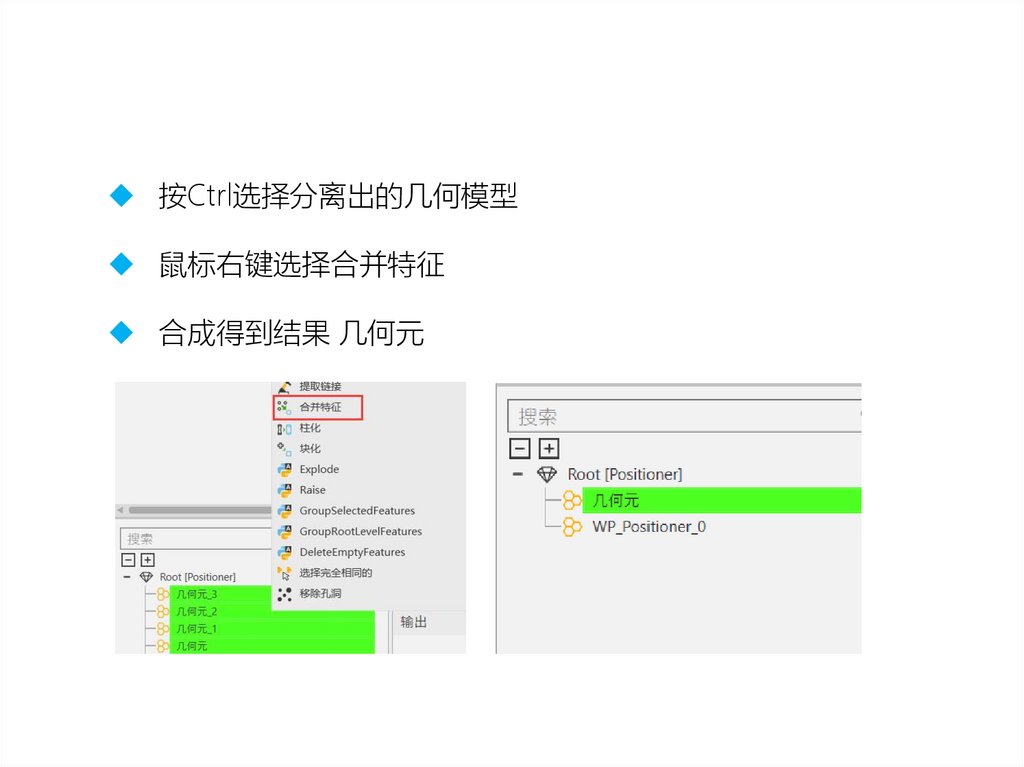
模型拆分按Ctrl选择分离出的几何模型
鼠标右键选择合并特征
合成得到结果 几何元
32.
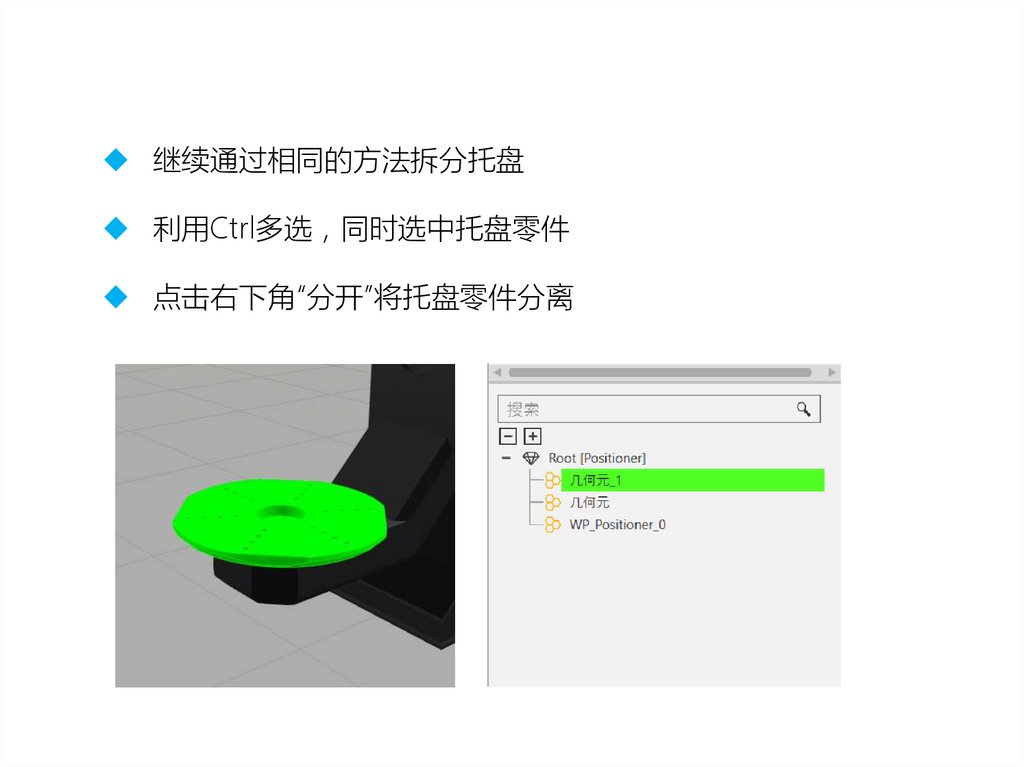
模型拆分继续通过相同的方法拆分托盘
利用Ctrl多选 同时选中托盘零件
点击右下角“分开”将托盘零件分离
33.
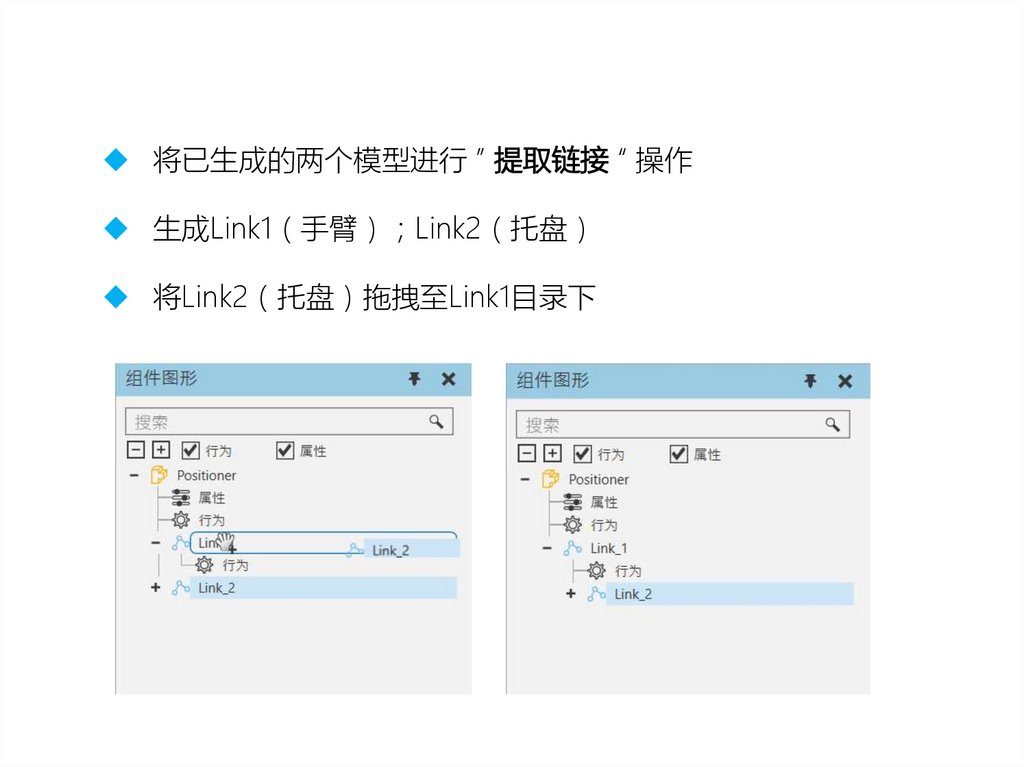
模型拆分将已生成的两个模型进行 ” 提取链接 “ 操作
生成Link1 手臂 Link2 托盘
将Link2 托盘 拖拽至Link1目录下
34.
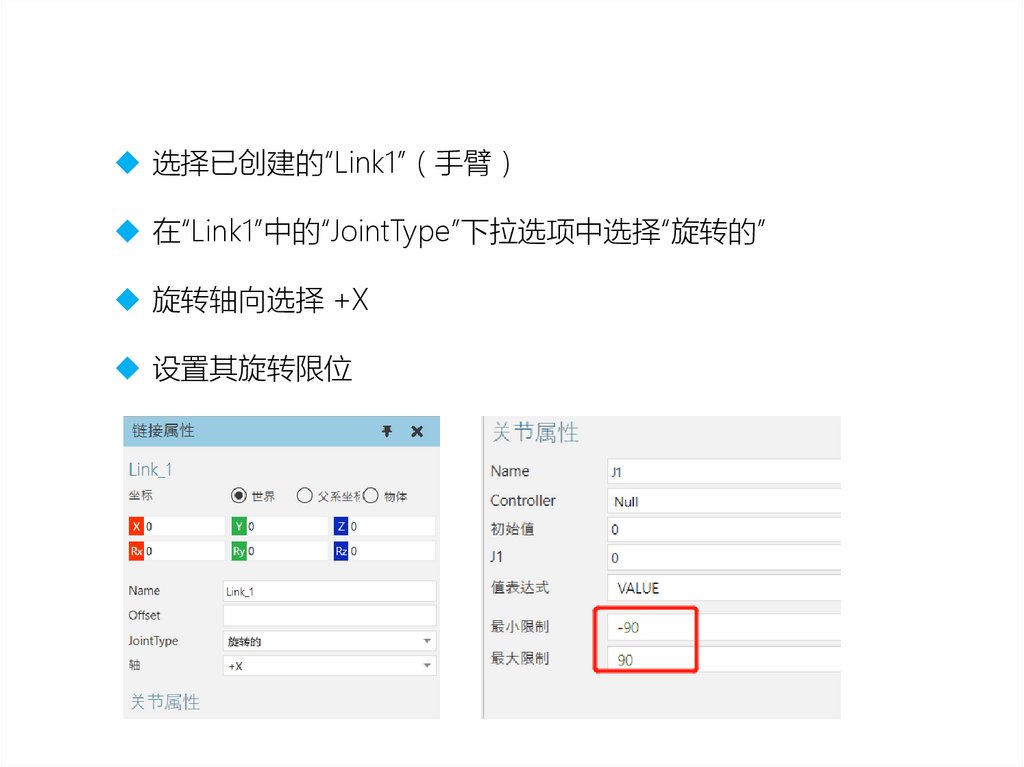
定义运动特征选择已创建的“Link1” 手臂
在“Link1”中的“JointType”下拉选项中选择“旋转的”
旋转轴向选择 +X
设置其旋转限位
35.
定义运动特征选择已创建的“Link2” 托盘
在“Link2”中的“JointType”下拉选项中选择“旋转的”
旋转轴向选择 +Z
设置其旋转限位
36.
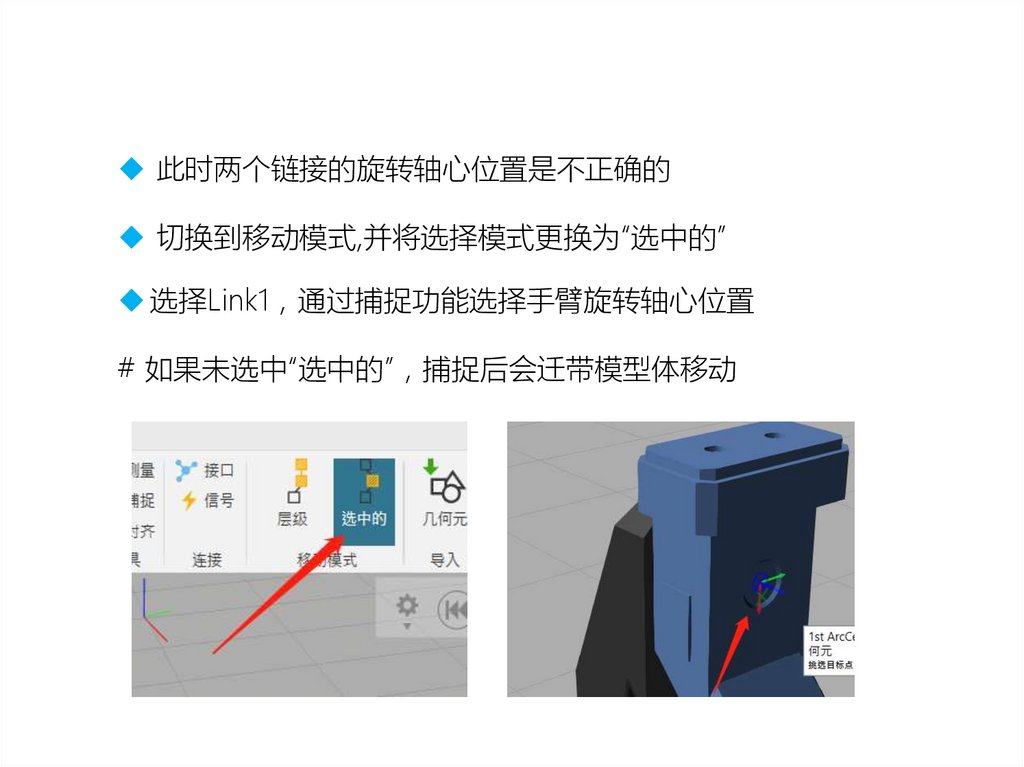
定义运动特征此时两个链接的旋转轴心位置是不正确的
切换到移动模式,并将选择模式更换为“选中的”
选择Link1 通过捕捉功能选择手臂旋转轴心位置
# 如果未选中“选中的” 捕捉后会迁带模型体移动
37.
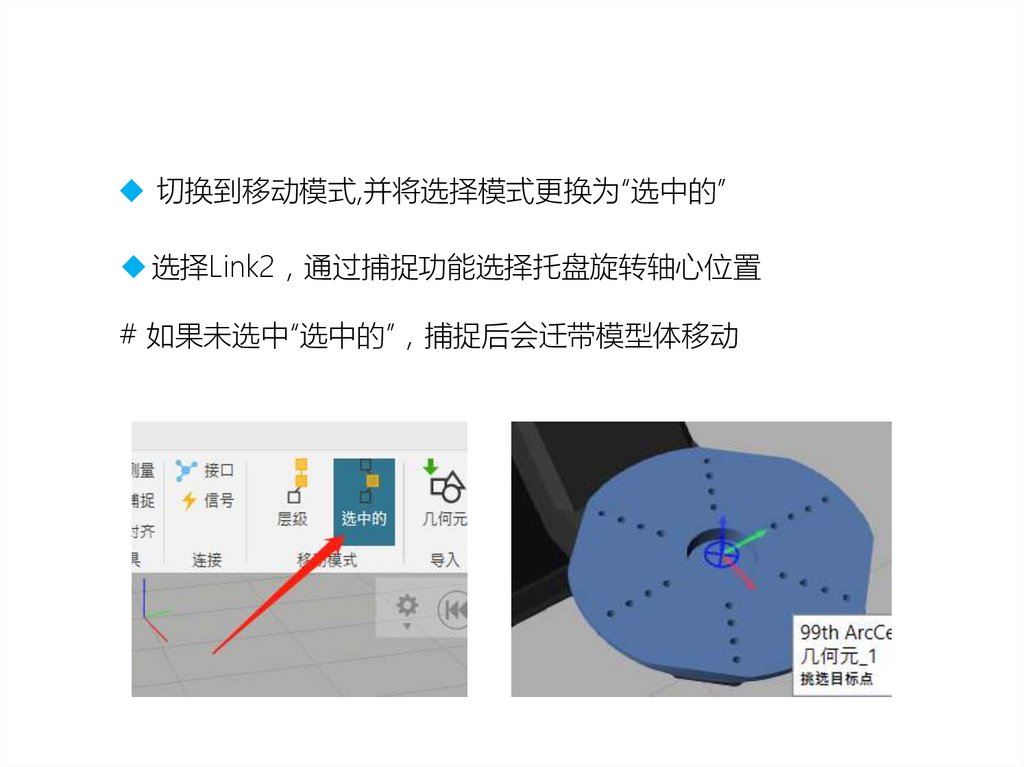
定义运动特征切换到移动模式,并将选择模式更换为“选中的”
选择Link2 通过捕捉功能选择托盘旋转轴心位置
# 如果未选中“选中的” 捕捉后会迁带模型体移动
38.
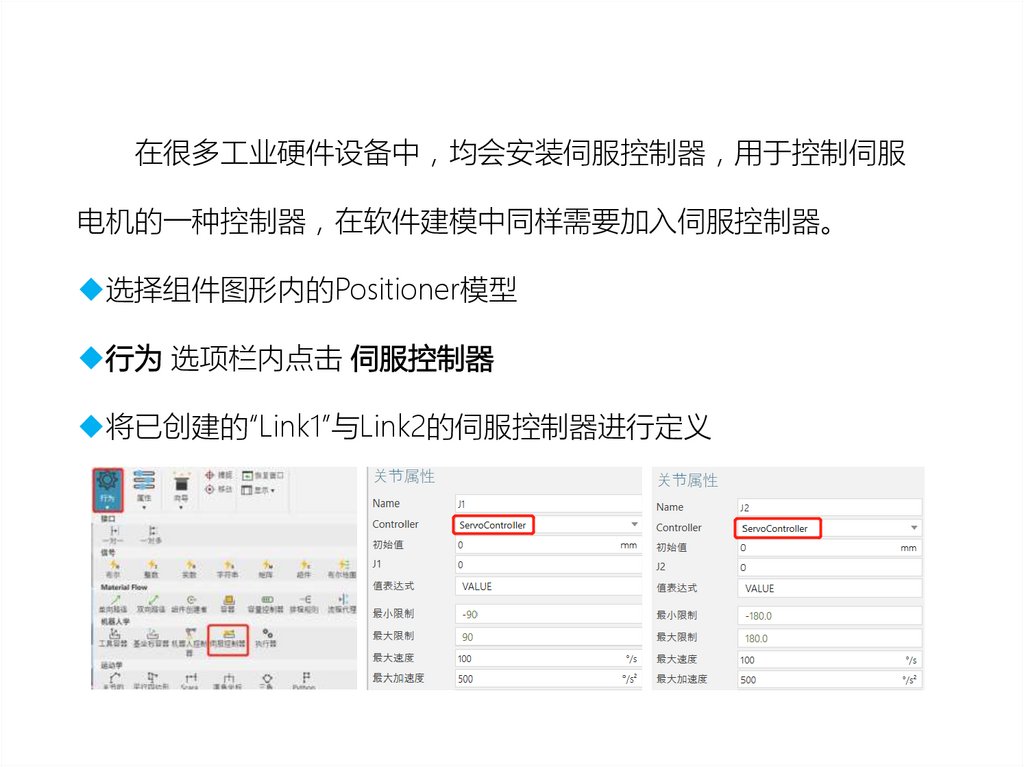
定义运动特征在很多工业硬件设备中 均会安装伺服控制器 用于控制伺服
电机的一种控制器 在软件建模中同样需要加入伺服控制器。
选择组件图形内的Positioner模型
行为 选项栏内点击 伺服控制器
将已创建的“Link1”与Link2的伺服控制器进行定义
39.
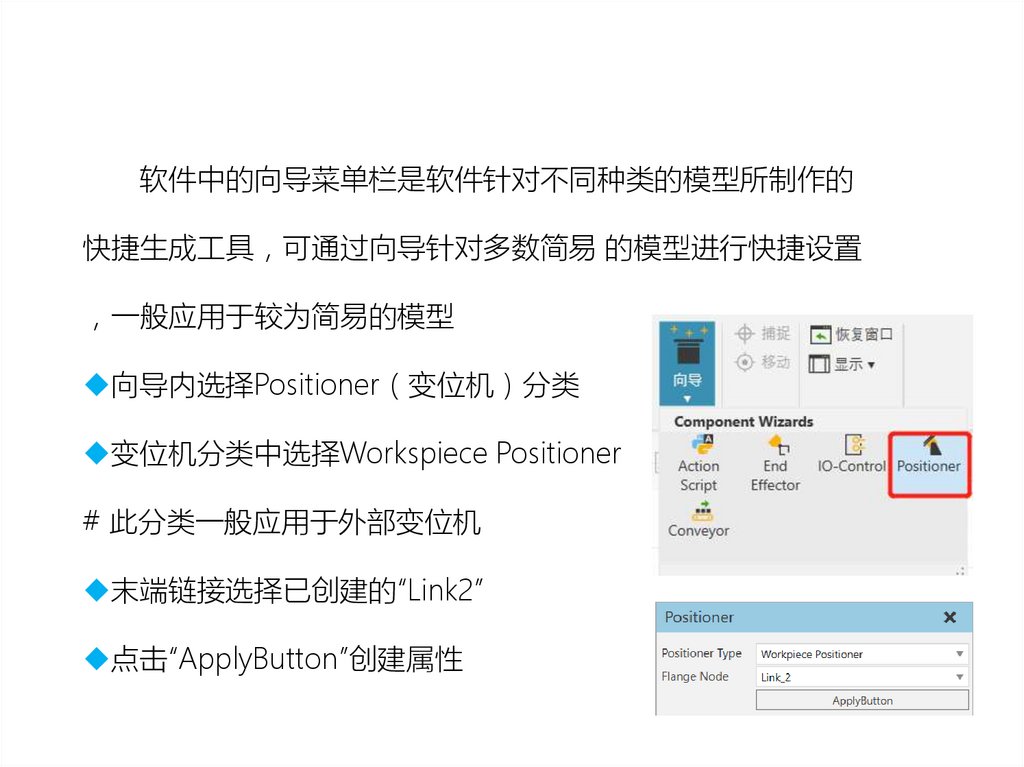
快捷生成模型配置软件中的向导菜单栏是软件针对不同种类的模型所制作的
快捷生成工具 可通过向导针对多数简易 的模型进行快捷设置
一般应用于较为简易的模型
向导内选择Positioner 变位机 分类
变位机分类中选择Workspiece Positioner
# 此分类一般应用于外部变位机
末端链接选择已创建的“Link2”
点击“ApplyButton”创建属性
40.
模型验证导入一个机器人 例如 IRB120
连接接口
手动示教并模拟进行验证
41.
代码语法• https://www.runoob.com/python/pythonwhile-loop.html
42.
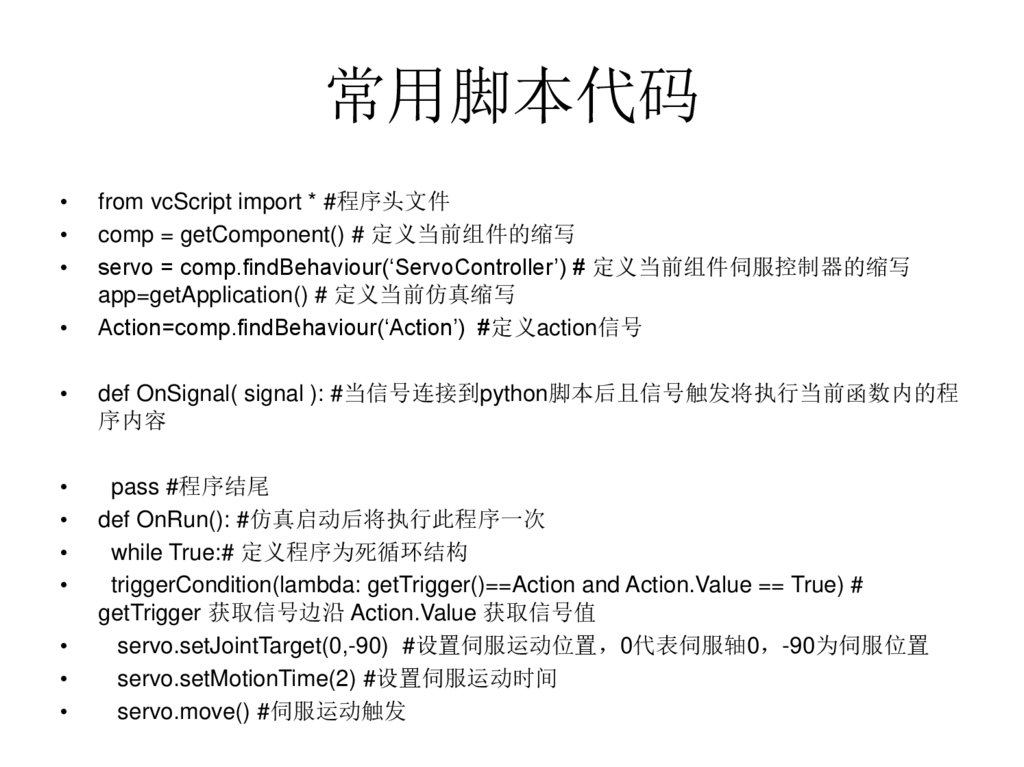
常用脚本代码from vcScript import * #程序头文件
comp = getComponent() # 定义当前组件的缩写
servo = comp.findBehaviour(‘ServoController’) # 定义当前组件伺服控制器的缩写
app=getApplication() # 定义当前仿真缩写
Action=comp.findBehaviour(‘Action’) #定义action信号
def OnSignal( signal ): #当信号连接到python脚本后且信号触发将执行当前函数内的程
序内容
pass #程序结尾
def OnRun(): #仿真启动后将执行此程序一次
while True:# 定义程序为死循环结构
triggerCondition(lambda: getTrigger()==Action and Action.Value == True) #
getTrigger 获取信号边沿 Action.Value 获取信号值
servo.setJointTarget(0,-90) #设置伺服运动位置 0代表伺服轴0 -90为伺服位置
servo.setMotionTime(2) #设置伺服运动时间
servo.move() #伺服运动触发