


 electronics
electronicsSimilar presentations:










Методы и системы встроенного контроля. Тема 1.1. Лекция 2
1.
Тема 1.1. Лекция 2. Методы исистемы встроенного контроля
2.
1.4. Методы и системы контроля САУ и ПНКДля обеспечения высокой эксплуатационной надежности
БСУ необходимо выполнить следующие требования:
-уменьшить
интенсивность
отказов
составляющих
элементов;
-обеспечить нормальное функционирование системы даже
при появлении отказов.
Реконфигурации системы, связанной с подключением резервных элементов, предшествует диагностирование БСУ, состоящее
в определении ее состояния в настоящий момент времени.
Процесс
установления
соответствия
фактического
технического состояния БСУ заданному называется
контролем.
Для решения задач контроля БСУ применяются различные
бортовые средства контроля (БСК) и наземно-бортовые
средства контроля (НБСК)
3.
Классификация БСК по следующим признакам: конструктивнойреализации, степени автоматизации, способу обработки
информации.
1. Согласно признаку конструктивной реализации БСК делятся
на встроенные и внешние. Встроенные средства контроля имеют
общее конструктивное исполнение с БСУ. Внешние средства выделяются в отдельные блоки.
2. По степени автоматизации БСК классифицируются на
неавтоматизированные,
автоматизированные
и
автоматические.
3. В зависимости от способа обработки информации БСК
можно разделить на аналоговые, цифровые и аналого-цифровые.
Наземно-бортовые средства контроля состоят из двух частей:
бортового устройства регистрации, устанавливаемого на ВС,
и аппаратуры
обработки
регистрируемой
в
полете
информации,
входящей
в
состав
средств
наземного
обслуживания.
4.
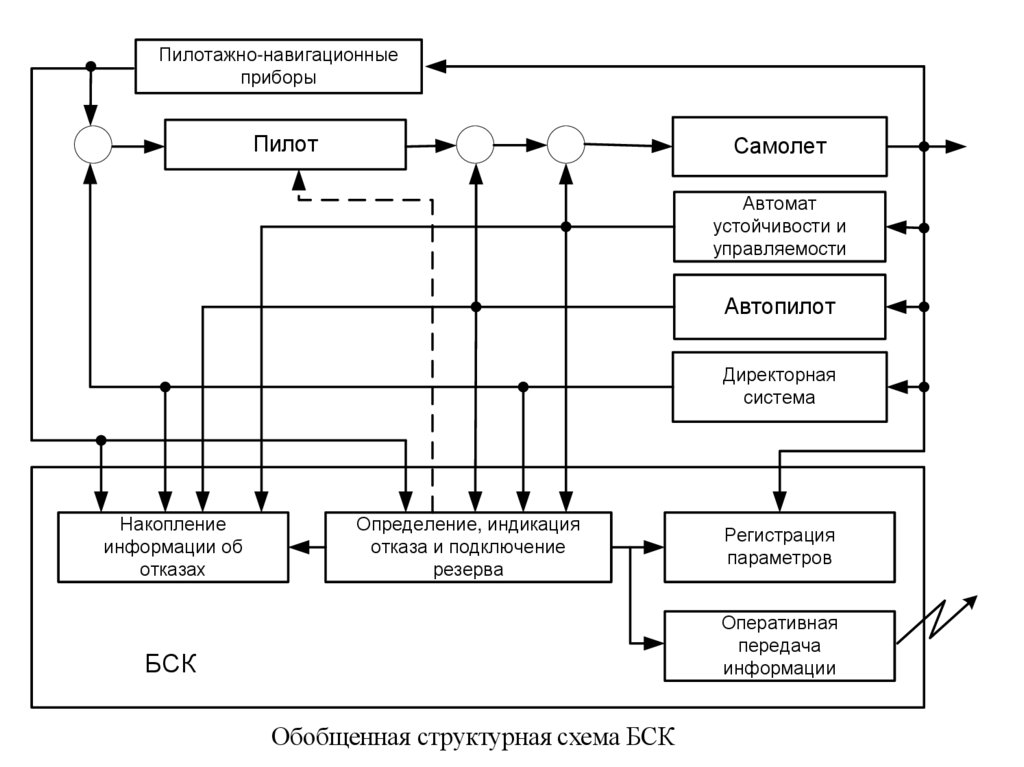
БСК в общем случае выполняют следующие функции:- определение в полете отказа контролируемых блоков с возможной выдачей
соответствующей информации экипажу;
- отключение отказавшего элемента и проведение реконфигурации контролируемой
системы для обеспечения ее работоспособности;
- регистрацию параметров и накопление информации об отказах элементов;
- оперативную передачу информации об отказах на землю.
Все подсистемы БСУ (штурвальное, директорное и автоматическое управление).
охвачены контролем.
В состав БСК в общем случае должны входить блоки:
- определения, индикации отказа и подключения резерва;
- регистрации параметров;
- накопления информации об отказах;
- оперативной передачи информации об отказах на Землю.
В аналоговых БСУ и существующих для них БСК, как правило, применяются
лишь первые два указанных блока. На современных ВС использование средств
цифровой техники позволяет эксплуатировать БСК с полным набором
функциональных возможностей, что приводит к повышению достоверности
результатов контроля бортовых систем управления.
5.
Пилотажно-навигационныеприборы
Пилот
Самолет
Автомат
устойчивости и
управляемости
Автопилот
Директорная
система
Накопление
информации об
отказах
Определение, индикация
отказа и подключение
резерва
Регистрация
параметров
Оперативная
передача
информации
БСК
Обобщенная структурная схема БСК
6.
1.5. Встроенные средства контроля САУ и ПНК.1.5.1. Функции встроенного контроля
Основными функциями ВСК в полете являются:
- контроль работоспособности устройств и блоков
средств автоматического управления;
- отключение отказавших и включение резервных
устройств;
- переключение с отказавшего (включенного) режима
работы средства автоматического управления на
исправный резервный режим работы;
- обработка информации о состоянии контролируемых
устройств и режимов работы средств автоматического
управления с последующей выдачей соответствующих
команд для необходимых переключений и отключений и
сигналов об интегральной исправности режимов на
световые табло.
7.
Основными функциями ВСК перед полетом и после полетаявляются:
автоматизированный самоконтроль ВСК;
автоматический
контроль
средств автоматического
управления с выдачей информации о неисправности до
съемного блока;
- автоматизированный поиск отказавших устройств.
Для контроля работоспособности средств автоматического
управления применяют различные методы.
Использование того или иного метода зависит от следующих
факторов:
- степени резервирования устройств, блоков или каналов;
- статических и динамических характеристик устройства и
контура, в котором это устройство работает;
- вида и основных характеристик входных и выходных сигналов
устройства
8.
1.5.2. Методы встроенного контроляМетод мажоритарной логики.
Используется для контроля систем со степенью резервирования > 2
Cодержит объекты контроля, кворум-элемент и компараторы.
Хо
Кворум-элемент
Хвых1
Сигнал отказа 1
Хвх1
Компаратор
Объект контроля
Хвх1
Хвых2
Объект контроля
Хвх1
Хвых3
Объект контроля
Компаратор
Компаратор
Сигнал отказа 2
Сигнал отказа 3
При больших различиях сигналов, поступающих с объектов контроля (ОК) кворумэлемент пропускает на выход сигнал промежуточной величины,
При малых расхождениях сигналов он работает в режиме осреднения и выдает сигнал, равный
среднему арифметическому трех сигналов.
X
X вых 2 X вых 3
X 0 вых1
3
если X вых 3 X кэ , то
Сигналы с каждого из ОК сравниваются на
компараторе (пороговом устройстве) с
осредненным сигналом КЭ.
X*0
X вых1 X вых 2
2
Сигнал отказа появляется при
| X вых X 0 | X комп
9.
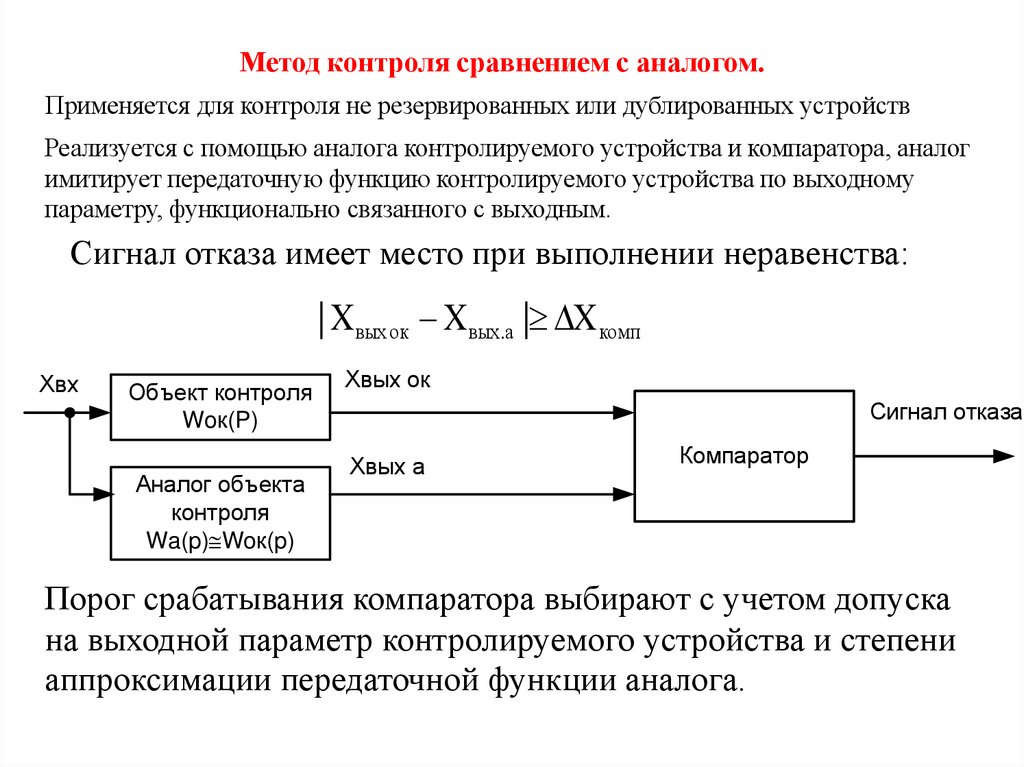
Метод контроля сравнением с аналогом.Применяется для контроля не резервированных или дублированных устройств
Реализуется с помощью аналога контролируемого устройства и компаратора, аналог
имитирует передаточную функцию контролируемого устройства по выходному
параметру, функционально связанного с выходным.
Сигнал отказа имеет место при выполнении неравенства:
| X вых ок X вых.а | X комп
Хвх
Объект контроля
Woк(P)
Аналог объекта
контроля
Wa(p)@Woк(p)
Хвых ок
Сигнал отказа
Хвых а
Компаратор
Порог срабатывания компаратора выбирают с учетом допуска
на выходной параметр контролируемого устройства и степени
аппроксимации передаточной функции аналога.
10.
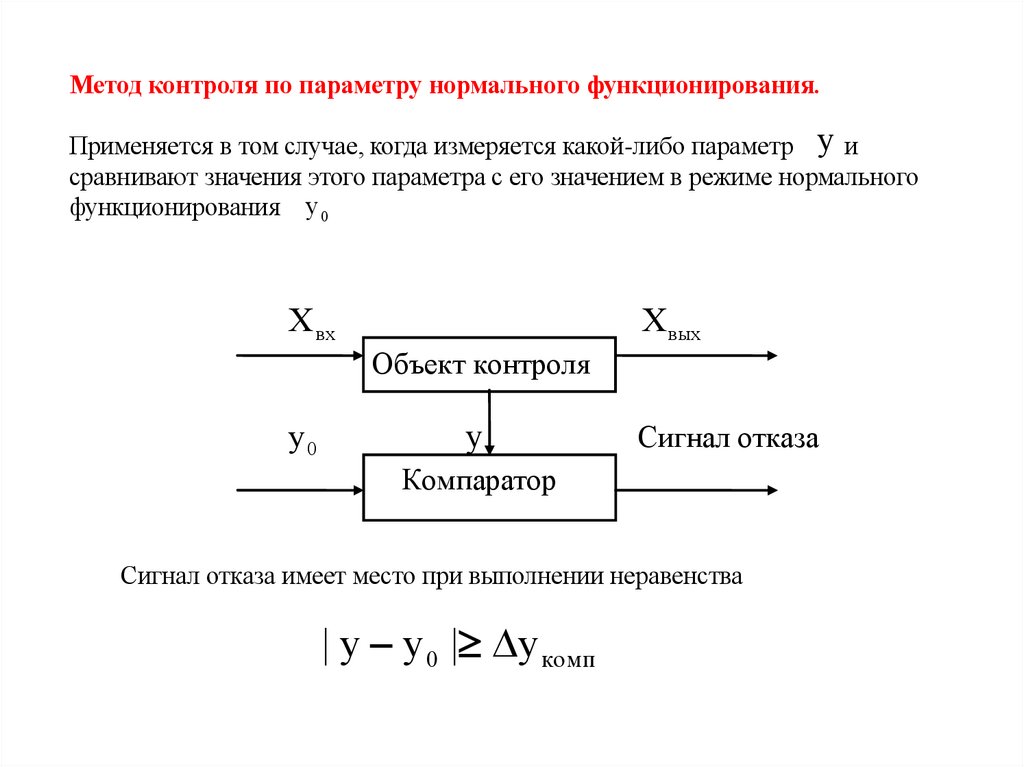
Метод контроля по параметру нормального функционирования.Применяется в том случае, когда измеряется какой-либо параметр y и
сравнивают значения этого параметра с его значением в режиме нормального
функционирования y 0
X вх
X вых
Объект контроля
y0
y
Сигнал отказа
Компаратор
Сигнал отказа имеет место при выполнении неравенства
| y y 0 | y комп
11.
Метод контроля по сигналу ошибки в контуре контролируемогоустройства.
Применяется для контроля работоспособности устройств,
представляющих собой самостоятельный замкнутый контур, время
переходного процесса в котором существенно меньше времени
переходного процесса в контуре управления, содержащем
контролируемое устройство.
Т.о. контур с контролирующим
устройством более быстрое и значит контролируемое устройство все
время работает в режиме обнуления рассогласования в
соответствующем контуре.
12.
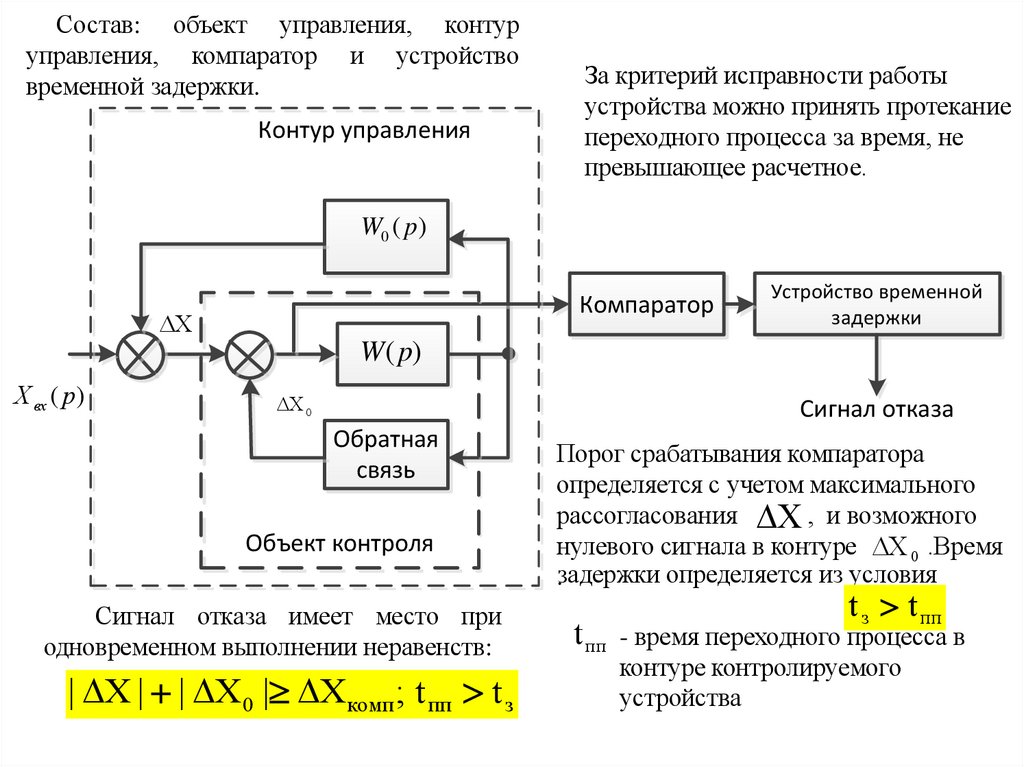
Состав: объект управления, контуруправления, компаратор и устройство
временной задержки.
Контур управления
За критерий исправности работы
устройства можно принять протекание
переходного процесса за время, не
превышающее расчетное.
W0 ( p)
Компаратор
Устройство временной
задержки
W ( p)
Х вх ( p)
0
Сигнал отказа
Обратная
связь
Объект контроля
Сигнал отказа имеет место при
одновременном выполнении неравенств:
| X | | X 0 | X комп ; t пп t з
Порог срабатывания компаратора
определяется с учетом максимального
рассогласования , и возможного
нулевого сигнала в контуре 0 .Время
.задержки определяется из условия
t з t пп
t пп - время переходного процесса в
контуре контролируемого
устройства
13.
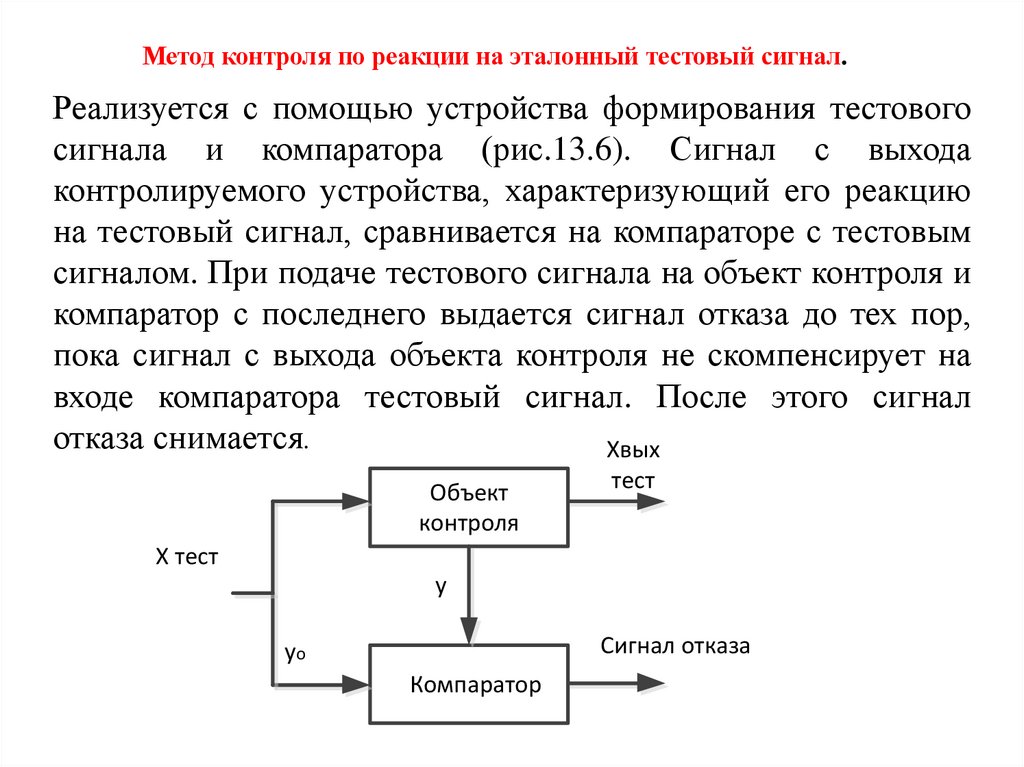
Метод контроля по реакции на эталонный тестовый сигнал.Реализуется с помощью устройства формирования тестового
сигнала и компаратора (рис.13.6). Сигнал с выхода
контролируемого устройства, характеризующий его реакцию
на тестовый сигнал, сравнивается на компараторе с тестовым
сигналом. При подаче тестового сигнала на объект контроля и
компаратор с последнего выдается сигнал отказа до тех пор,
пока сигнал с выхода объекта контроля не скомпенсирует на
входе компаратора тестовый сигнал. После этого сигнал
отказа снимается.
Хвых
Объект
контроля
тест
Х тест
у
Сигнал отказа
уо
Компаратор
14.
1.6. Бортовые средства контроля техническогосостояния современных самолетов.
СОДЕРЖАНИЕ
1.6. 1. Функциональная схема комплексной системы информации о
состоянии авиационной техники СИС
1.6.1.1. Система САС. Состав, назначение, функционирование.
1.6.1.2. Система КИСС. Состав, назначение, функционирование.
1.6.1.3 Система ССЛО. Состав, назначение, функционирование.
1.6.2. Общая методика поиска отказа в бортовом оборудовании.
1. стр.221-249, гл.11 В.Г. Воробьев, В.Д. Константинов «Техническое
обслуживание и ремонт АЭС и ПНК, 2007г
15.
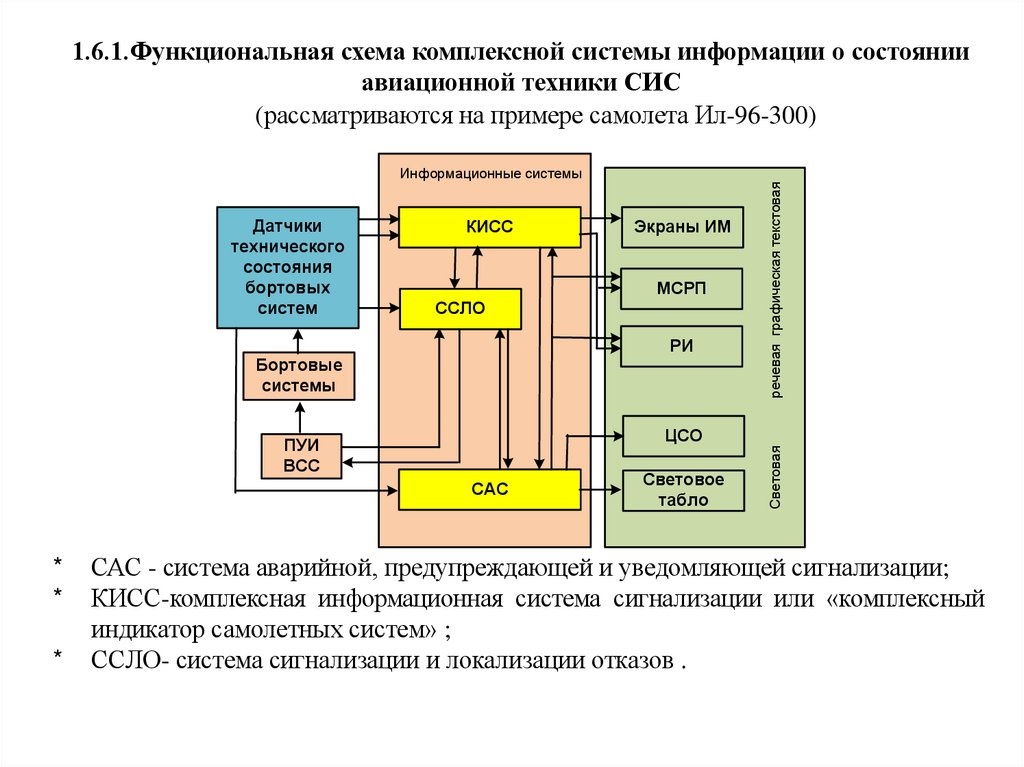
1.6.1.Функциональная схема комплексной системы информации о состоянииавиационной техники СИС
(рассматриваются на примере самолета Ил-96-300)
КИСС
Экраны ИМ
МСРП
ССЛО
РИ
Бортовые
системы
ЦСО
ПУИ
ВСС
САС
*
*
*
Световое
табло
Световая
Датчики
технического
состояния
бортовых
систем
речевая графическая текстовая
Информационные системы
САС - система аварийной, предупреждающей и уведомляющей сигнализации;
КИСС-комплексная информационная система сигнализации или «комплексный
индикатор самолетных систем» ;
ССЛО- система сигнализации и локализации отказов .
16.
1.6.1.1. СИСТЕМА АВАРИЙНОЙ, ПРЕДУПРЕЖДАЮЩЕЙ И УВЕДОМЛЯЮЩЕЙСИГНАЛИЗАЦИИ (САС)
САС является первым уровнем контроля исправности бортовых изделий.
При отказе КИСС и ССЛО она обеспечивает экипаж информацией об отказах и состояниях систем,
влияющих на безопасность полета.
Ввиду простоты ее устройства и невысокой глубины контроля технического состояния систем, она
обладает высокой надежностью и оперативностью.
В состав САС входят:
Регуляторы
яркости
Импульс
ный ген.
БСС-1 №1
БСС-1 №9
Кнопкитабло
ЦСО
«ГОНГ»
Световое
табло
…
…..
…..
Датчики
Транзисторный
ключ
Световое
табло
…..
Датчики
КИСС
Транзисторный
ключ
…..
Датчики
ВСК
Усилитель
-инвертор
…..
…
Датчики
Бортовых
систем
ЦСО
блоки световой сигнализации (БСС-1);
центральные световые огни (ЦСО);
управляющие
кнопки
со
световой
сигнализацией;
ручные регуляторы яркости световых
сигналов.
От датчиков объектов контроля в САС
поступают сигналы в виде наличия или
отсутствия напряжения, замкнутой или
разомкнутой цепи.
Применяется два типа датчиков:
• 1-го типа: при наличии сигнала выдается
+27; при отсутствии сигнала — разрыв
цепи;
• 2-го типа: при наличии сигнала выдается
«замыкание на корпус»; при отсутствии
сигнала — разрыв цепи.
Датчики этого типа подключаются к транзисторному ключу блока БСС через усилители-инверторы,
которые преобразуют сигнал «замыкание на корпус» в сигнал +27 В. В качестве датчиков могут
использоваться также выходы системы встроенного контроля (СВК) отдельных блоков изделий.
17.
Управляемые этими сигналами транзисторные ключи включают соответствующие лампысветовых табло и кнопок-табло
САС обеспечивает выдачу сигналов трех категорий:
• аварийной — красного цвета;
• предупреждающей — желтого цвета;
• уведомляющей — зеленого, синего или белого цвета.
Светосигнализаторы дублируют сигнальную информацию КИСС и указывают место
расположения органов управления системами, которые связаны с сигнализируемым отказом.
Кнопки расположены на пультах управления соответствующих бортовых систем:
электроснабжения, гидросистемы, топливной системы, авиадвигателей, радиосистем и т.д.
Количество блоков БСС-1 зависит от типа самолета. Так, на Ил-96-300 установлено 9
блоков. Каждый блок обеспечивает возможность управления до 60 каналов сигнализации
(каждый канал включает в себя датчик сигнала, транзисторный ключ и светосигнальное
табло или управляющую кнопку со световой индикацией).
В каждом блоке БСС предусмотрено по два канала для включения ЦСО — со
светофильтрами красного и желтого цвета. В эти каналы включены схемы импульсных
генераторов, обеспечивающих импульсный режим работы светового сигнала при появлении
аварийного или предупреждающего сигнала. При этом может выдаваться и звуковой сигнал
(«гонг»).
Для регулировки яркости световых табло имеются специальные шестипозиционные
регуляторы ручного управления, подключаемые к блокам БСС.
Подключение элементов САС и бортовой аппаратуры (светосигнальных устройств,
датчиков, кнопок контроля, регуляторов яркости, ЦСО, КИСС и бортовой сети) к блокам
БСС выполняется с помощью электрических соединителей типа s-600
18.
1.6.1.2 КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА СИГНАЛИЗАЦИИ (КИСС)КИСС (комплексный индикатор самолетный систем) обеспечивает:
* предупреждение экипажа о возникновении опасных ситуаций (сигнальная
информация);
* выдачу информации о параметрах и состоянии систем самолета и двигателей,
которая отображается на соответствующих мнемокадрах многофункциональных
индикаторов (ИМ) в виде графиков и текстов;
* отображение информации о результате контроля систем.
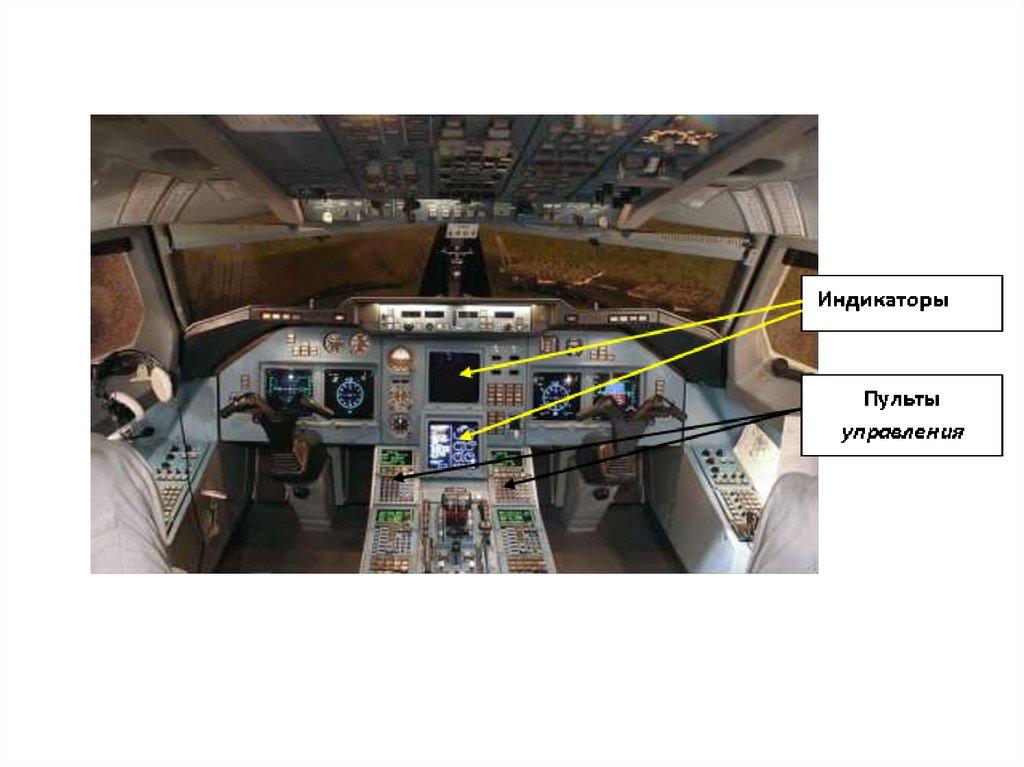
В КИСС на экранах двух многофункциональных индикаторов ИМ отображается
информация о текущих параметрах авиадвигателей и других бортовых систем, о
появившихся отказах систем и, в ряде случаев, отдельных блоков систем.
Информация об отказах и об опасных режимах работы систем через САС
обеспечивает включение соответствующей световой и звуковой сигнализации. Кроме
того, эта информация регистрируется в ССЛО и в магнитной системе регистрации
параметров (МСРП).
19.
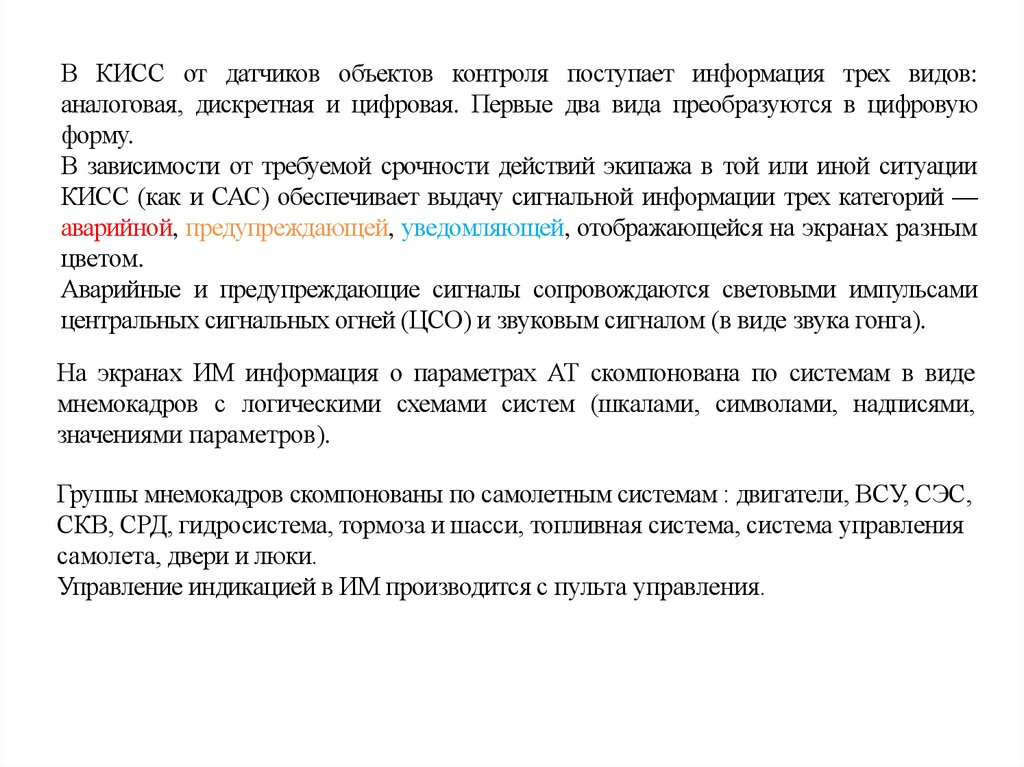
В КИСС от датчиков объектов контроля поступает информация трех видов:аналоговая, дискретная и цифровая. Первые два вида преобразуются в цифровую
форму.
В зависимости от требуемой срочности действий экипажа в той или иной ситуации
КИСС (как и САС) обеспечивает выдачу сигнальной информации трех категорий —
аварийной, предупреждающей, уведомляющей, отображающейся на экранах разным
цветом.
Аварийные и предупреждающие сигналы сопровождаются световыми импульсами
центральных сигнальных огней (ЦСО) и звуковым сигналом (в виде звука гонга).
На экранах ИМ информация о параметрах АТ скомпонована по системам в виде
мнемокадров с логическими схемами систем (шкалами, символами, надписями,
значениями параметров).
Группы мнемокадров скомпонованы по самолетным системам : двигатели, ВСУ, СЭС,
СКВ, СРД, гидросистема, тормоза и шасси, топливная система, система управления
самолета, двери и люки.
Управление индикацией в ИМ производится с пульта управления.
20.
21.
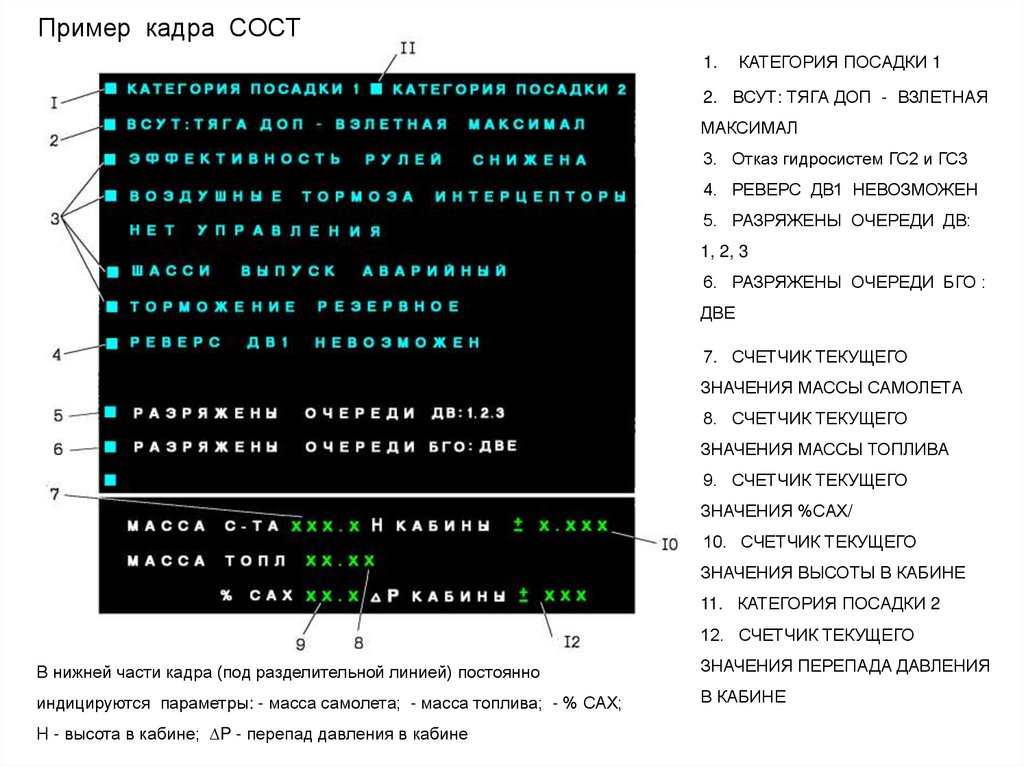
Пример кадра СОСТ1.
КАТЕГОРИЯ ПОСАДКИ 1
2. ВСУТ: ТЯГА ДОП - ВЗЛЕТНАЯ
МАКСИМАЛ
3. Отказ гидросистем ГС2 и ГС3
4. РЕВЕРС ДВ1 НЕВОЗМОЖЕН
5. РАЗРЯЖЕНЫ ОЧЕРЕДИ ДВ:
1, 2, 3
6. РАЗРЯЖЕНЫ ОЧЕРЕДИ БГО :
ДВЕ
7. СЧЕТЧИК ТЕКУЩЕГО
ЗНАЧЕНИЯ МАССЫ САМОЛЕТА
8. СЧЕТЧИК ТЕКУЩЕГО
ЗНАЧЕНИЯ МАССЫ ТОПЛИВА
9. СЧЕТЧИК ТЕКУЩЕГО
ЗНАЧЕНИЯ %САХ/
10. СЧЕТЧИК ТЕКУЩЕГО
ЗНАЧЕНИЯ ВЫСОТЫ В КАБИНЕ
11. КАТЕГОРИЯ ПОСАДКИ 2
12. СЧЕТЧИК ТЕКУЩЕГО
В нижней части кадра (под разделительной линией) постоянно
ЗНАЧЕНИЯ ПЕРЕПАДА ДАВЛЕНИЯ
индицируются параметры: - масса самолета; - масса топлива; - % САХ;
В КАБИНЕ
Н - высота в кабине; P - перепад давления в кабине
22.
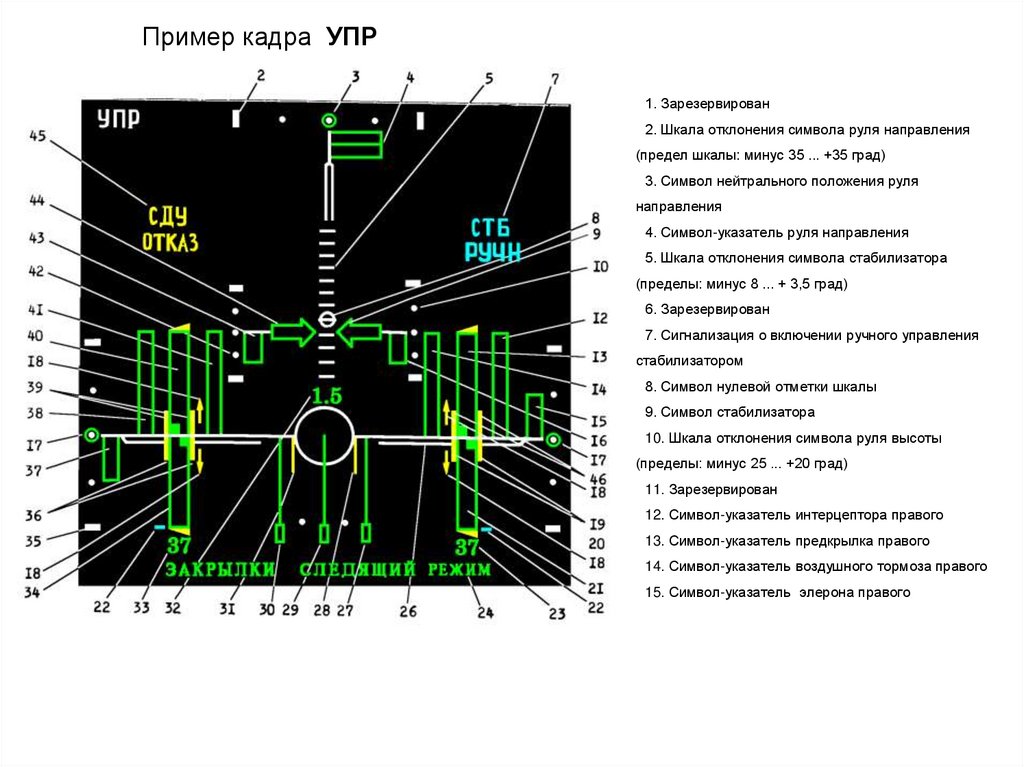
Пример кадра УПР1. Зарезервирован
2. Шкала отклонения символа руля направления
(предел шкалы: минус 35 ... +35 град)
3. Символ нейтрального положения руля
направления
4. Символ-указатель руля направления
5. Шкала отклонения символа стабилизатора
(пределы: минус 8 ... + 3,5 град)
6. Зарезервирован
7. Сигнализация о включении ручного управления
стабилизатором
8. Символ нулевой отметки шкалы
9. Символ стабилизатора
10. Шкала отклонения символа руля высоты
(пределы: минус 25 ... +20 град)
11. Зарезервирован
12. Символ-указатель интерцептора правого
13. Символ-указатель предкрылка правого
14. Символ-указатель воздушного тормоза правого
15. Символ-указатель элерона правого
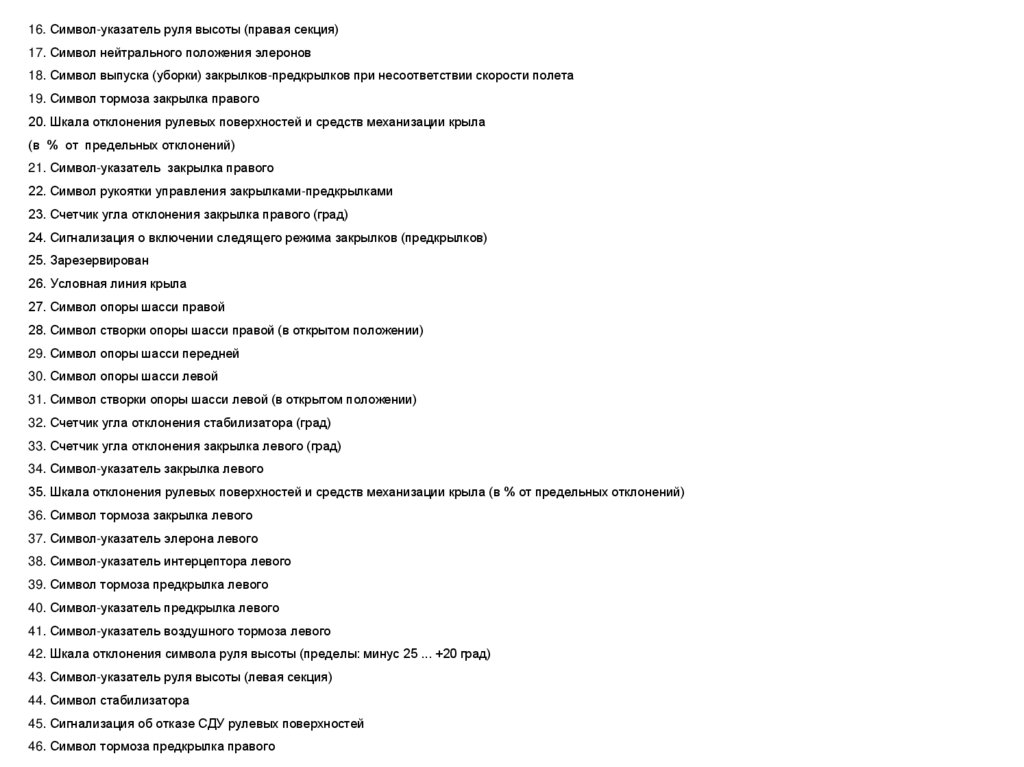
23.
16. Символ-указатель руля высоты (правая секция)17. Символ нейтрального положения элеронов
18. Символ выпуска (уборки) закрылков-предкрылков при несоответствии скорости полета
19. Символ тормоза закрылка правого
20. Шкала отклонения рулевых поверхностей и средств механизации крыла
(в % от предельных отклонений)
21. Символ-указатель закрылка правого
22. Символ рукоятки управления закрылками-предкрылками
23. Счетчик угла отклонения закрылка правого (град)
24. Сигнализация о включении следящего режима закрылков (предкрылков)
25. Зарезервирован
26. Условная линия крыла
27. Символ опоры шасси правой
28. Символ створки опоры шасси правой (в открытом положении)
29. Символ опоры шасси передней
30. Символ опоры шасси левой
31. Символ створки опоры шасси левой (в открытом положении)
32. Счетчик угла отклонения стабилизатора (град)
33. Счетчик угла отклонения закрылка левого (град)
34. Символ-указатель закрылка левого
35. Шкала отклонения рулевых поверхностей и средств механизации крыла (в % от предельных отклонений)
36. Символ тормоза закрылка левого
37. Символ-указатель элерона левого
38. Символ-указатель интерцептора левого
39. Символ тормоза предкрылка левого
40. Символ-указатель предкрылка левого
41. Символ-указатель воздушного тормоза левого
42. Шкала отклонения символа руля высоты (пределы: минус 25 ... +20 град)
43. Символ-указатель руля высоты (левая секция)
44. Символ стабилизатора
45. Сигнализация об отказе СДУ рулевых поверхностей
46. Символ тормоза предкрылка правого
24.
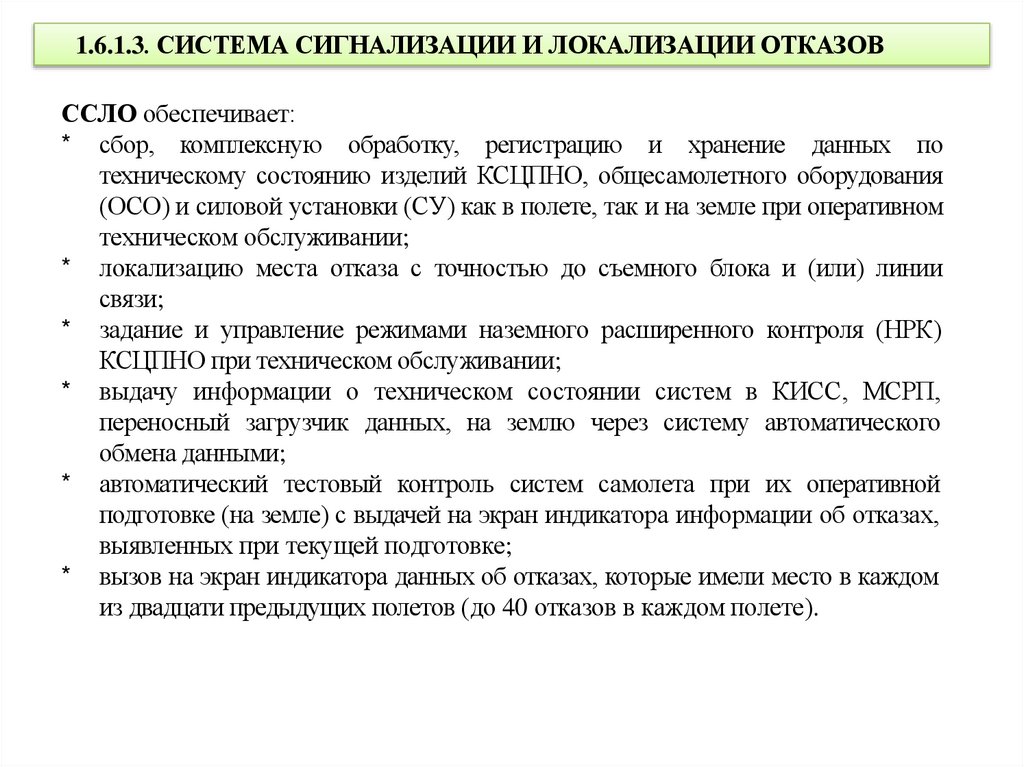
1.6.1.3. СИСТЕМА СИГНАЛИЗАЦИИ И ЛОКАЛИЗАЦИИ ОТКАЗОВССЛО обеспечивает:
* сбор, комплексную обработку, регистрацию и хранение данных по
техническому состоянию изделий КСЦПНО, общесамолетного оборудования
(ОСО) и силовой установки (СУ) как в полете, так и на земле при оперативном
техническом обслуживании;
* локализацию места отказа с точностью до съемного блока и (или) линии
связи;
* задание и управление режимами наземного расширенного контроля (НРК)
КСЦПНО при техническом обслуживании;
* выдачу информации о техническом состоянии систем в КИСС, МСРП,
переносный загрузчик данных, на землю через систему автоматического
обмена данными;
* автоматический тестовый контроль систем самолета при их оперативной
подготовке (на земле) с выдачей на экран индикатора информации об отказах,
выявленных при текущей подготовке;
* вызов на экран индикатора данных об отказах, которые имели место в каждом
из двадцати предыдущих полетов (до 40 отказов в каждом полете).
25.
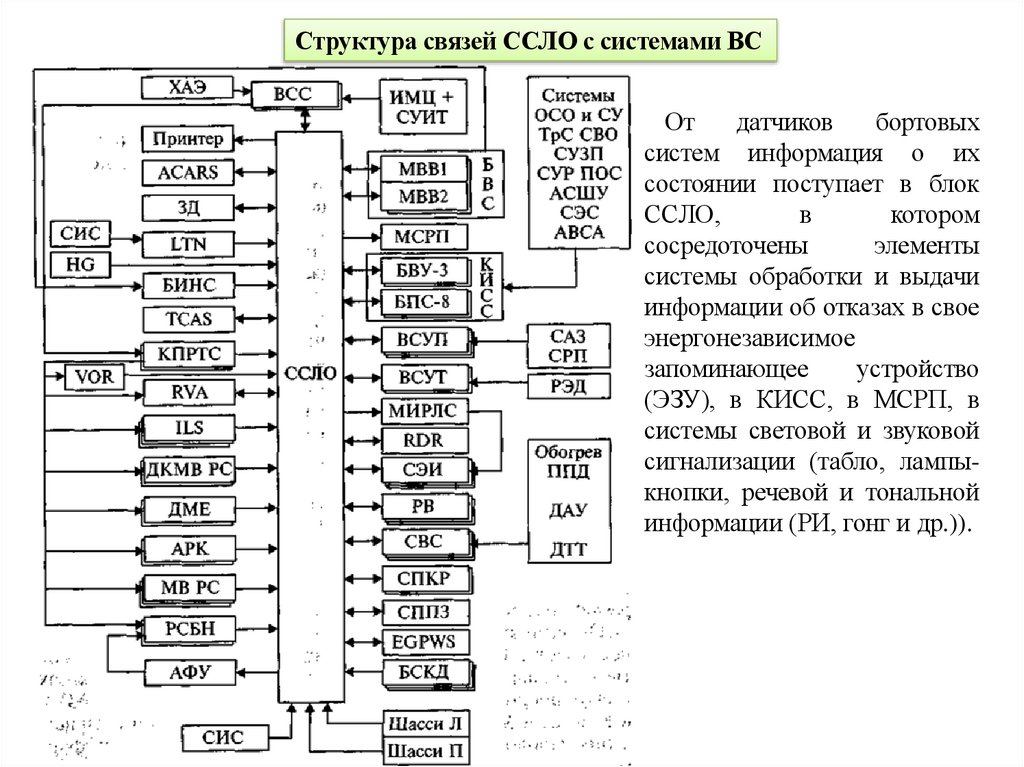
Структура связей ССЛО с системами ВСОт
датчиков
бортовых
систем информация о их
состоянии поступает в блок
ССЛО,
в
котором
сосредоточены
элементы
системы обработки и выдачи
информации об отказах в свое
энергонезависимое
запоминающее
устройство
(ЭЗУ), в КИСС, в МСРП, в
системы световой и звуковой
сигнализации (табло, лампыкнопки, речевой и тональной
информации (РИ, гонг и др.)).
26.
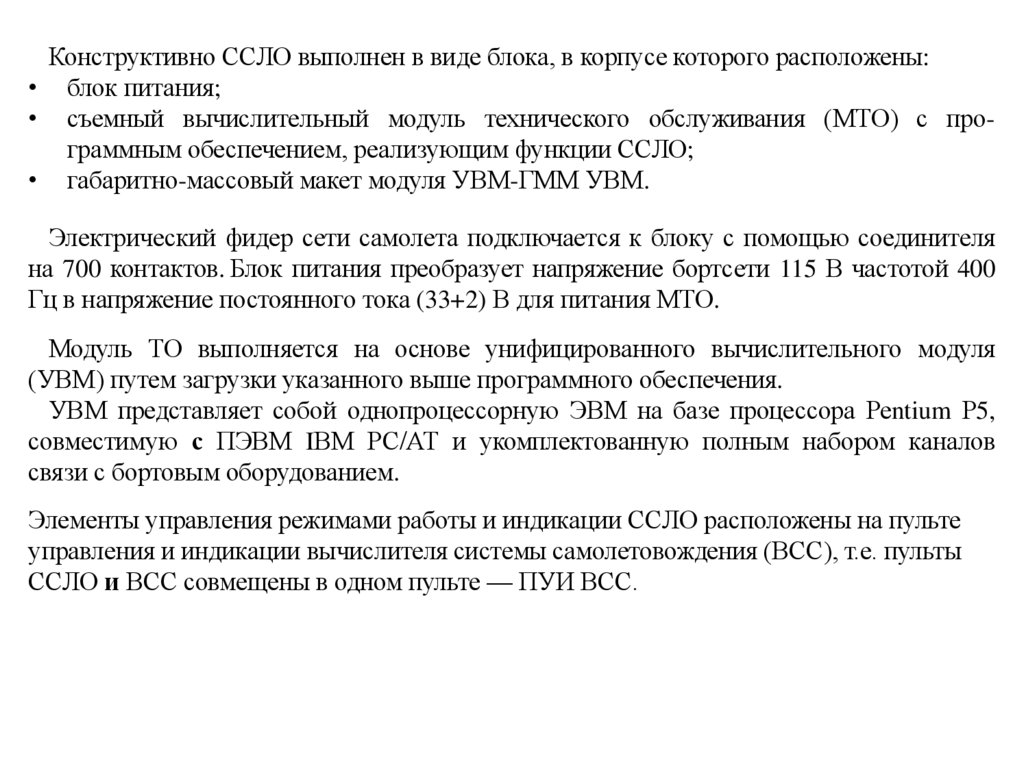
Конструктивно ССЛО выполнен в виде блока, в корпусе которого расположены:• блок питания;
• съемный вычислительный модуль технического обслуживания (МТО) с программным обеспечением, реализующим функции ССЛО;
• габаритно-массовый макет модуля УВМ-ГММ УВМ.
Электрический фидер сети самолета подключается к блоку с помощью соединителя
на 700 контактов. Блок питания преобразует напряжение бортсети 115 В частотой 400
Гц в напряжение постоянного тока (33+2) В для питания МТО.
Модуль ТО выполняется на основе унифицированного вычислительного модуля
(УВМ) путем загрузки указанного выше программного обеспечения.
УВМ представляет собой однопроцессорную ЭВМ на базе процессора Реntium Р5,
совместимую с ПЭВМ IВМ РС/АТ и укомплектованную полным набором каналов
связи с бортовым оборудованием.
Элементы управления режимами работы и индикации ССЛО расположены на пульте
управления и индикации вычислителя системы самолетовождения (ВСС), т.е. пульты
ССЛО и ВСС совмещены в одном пульте — ПУИ ВСС.
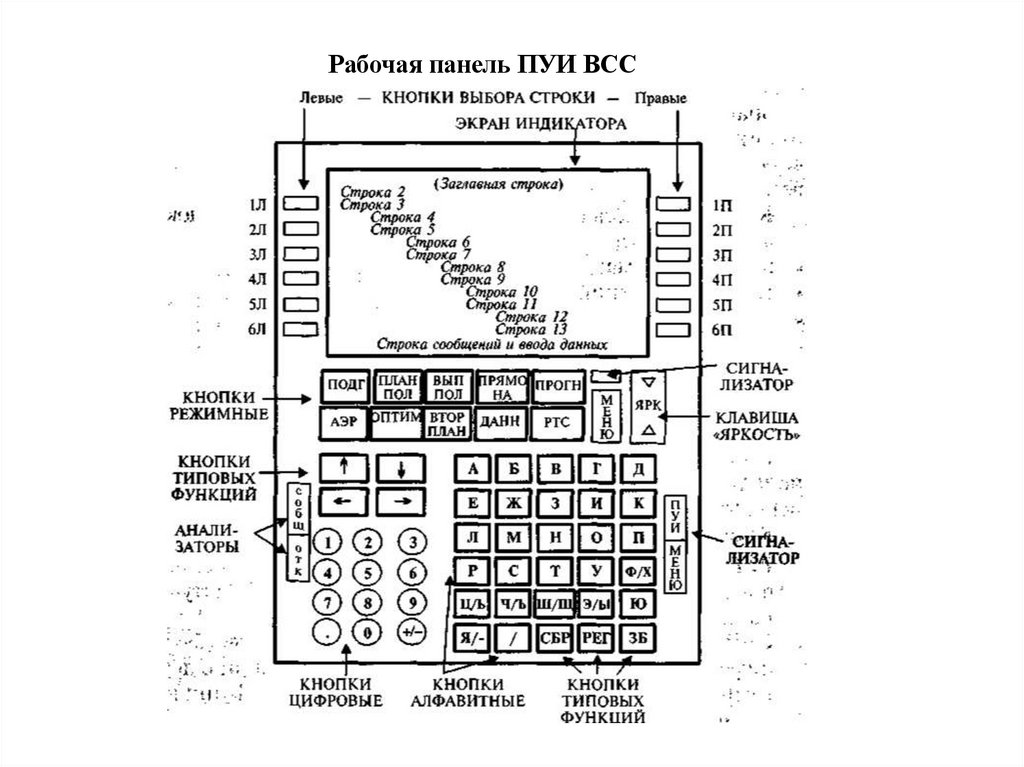
27.
Рабочая панель ПУИ ВСС28.
1.6.2. ОБЩАЯ МЕТОДИКА ПОИСКА ОТКАЗА В БОРТОВОМОБОРУДОВАНИИ ВС
Если при контроле работоспособности бортового оборудования КПСС и САС
указывают на наличие отказа в какой-то системе, возникает задача поиска места
отказа. В ряде случаев на ССЛО, на ИМ КИСС указывается конкретно отказавший
блок. Однако во многих случаях определяется только наличие отказа системы.
Тогда возникает задача поиска конкретного места (блока) отказа. Эта же задача
возникает и для ВС, которые не оборудованы системами КИСС, ССЛО. Для
решения этой задачи для каждой бортовой системы ВС разработан алгоритм
(схема) поиска неисправности. В основу этого алгоритма положена поэтапная
проверка работоспособности системы. Алгоритм представляется в виде
разветвленной логической последовательности проверок (действий) —
пооперационных блоков.
29.
Схема алгоритма разделена на две ветви: «Исправно» и «Неисправно». Ветвь«Исправно» определяет собой поэтапную последовательную проверку
работоспособности всех элементов системы. В каждом пооперационном блоке
ветви указываются операции, входящие в данный этап проверки; даются
указания, на что следует обратить внимание; могут быть приведены параметры,
характеризующие исправность проверяемого участка.
Каждый блок ветви «Исправно» имеет одно или несколько ответвлений в блоки,
которые составляют ветвь «Неисправно». В каждом блоке этой ветви записана
возможная неисправность, ее признак. Для каждой возможной неисправности дан
отдельный блок. В этом блоке дается ссылка на номер соответствующей схемы
(алгоритма, процедуры), к которой надо обратиться для определения отказавшего
элемента.
В схеме процедуры перечислены возможные неисправности, которые могут
приводить к указанному в начале процедуры признаку неисправности и даются
способы их устранения.
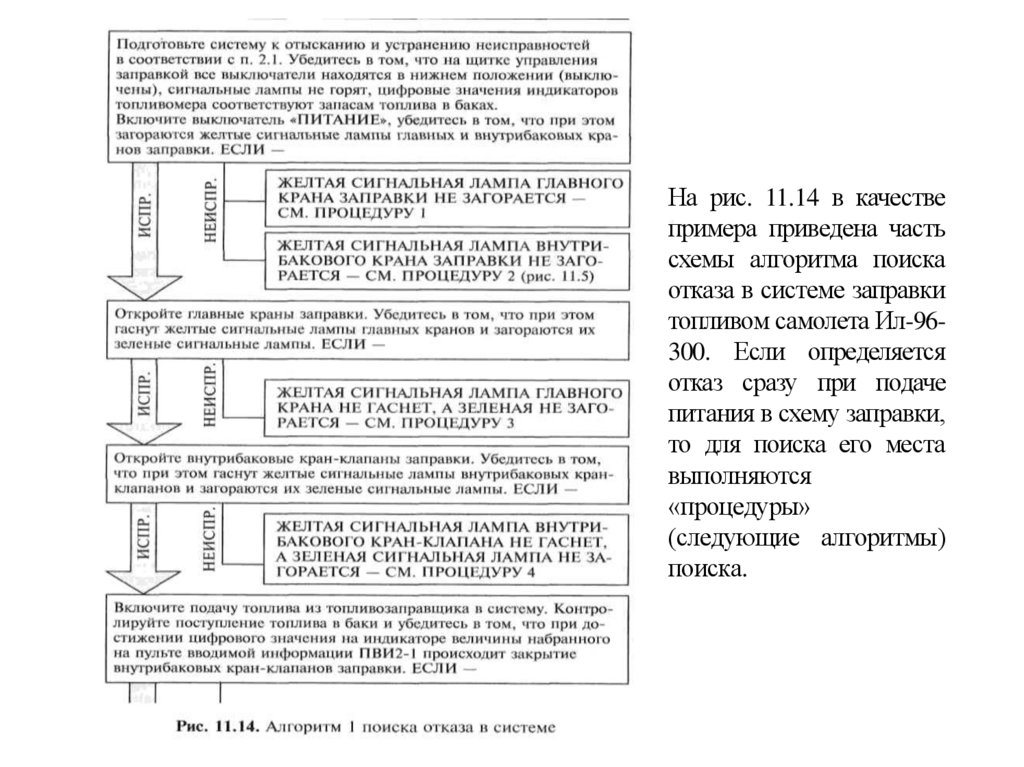
30.
На рис. 11.14 в качествепримера приведена часть
схемы алгоритма поиска
отказа в системе заправки
топливом самолета Ил-96300. Если определяется
отказ сразу при подаче
питания в схему заправки,
то для поиска его места
выполняются
«процедуры»
(следующие алгоритмы)
поиска.
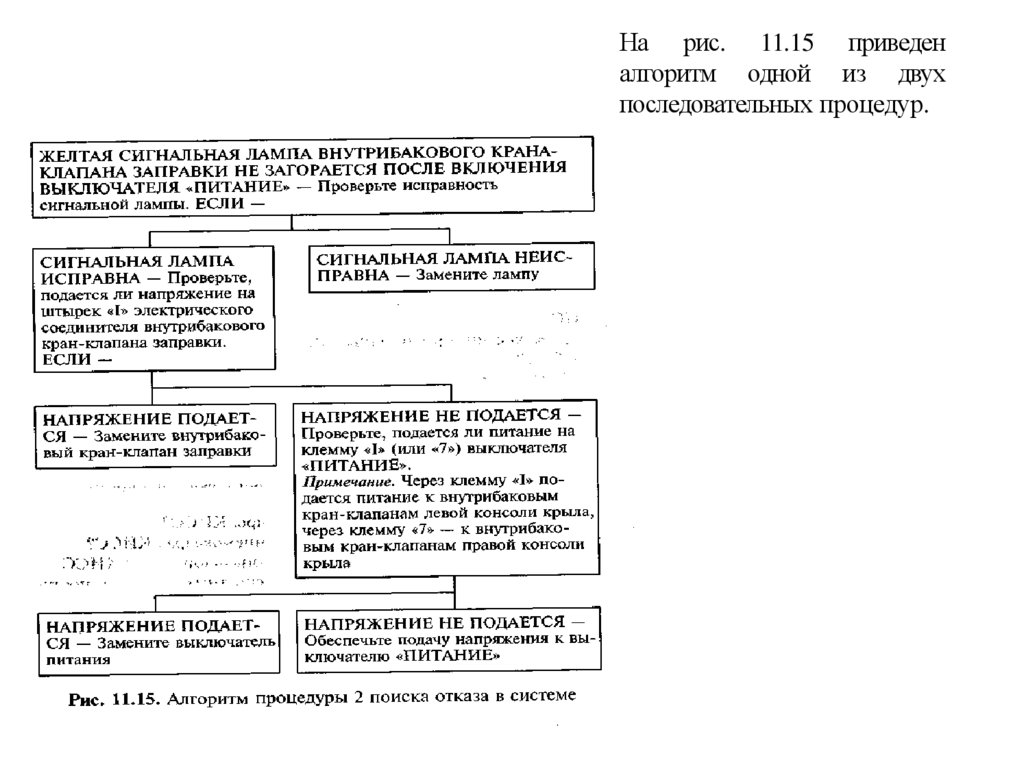
31.
На рис. 11.15 приведеналгоритм одной из двух
последовательных процедур.
32.
Аналогично создаются алгоритмы неавтоматического поиска отказа длядругих бортовых систем. Эти алгоритмы могут использоваться при
создании автоматических систем контроля состояния бортовых систем.
Примером может служить рассмотренная выше ССЛО. К сожалению,
она не охватывает все изделия бортового оборудования.
Разработка указанных алгоритмов определения места отказа в сложных
системах выполняется разработчиками ВС и соответствующих систем и
является довольно трудоемкой задачей. Данные алгоритмы приводятся в
Руководстве по технической эксплуатации типа ВС.