

 mechanics
mechanicsSimilar presentations:



")

")
")



Робот космічного призначення, анімація рухів ланок
1.
ДИПЛОМНА РОБОТАНА ТЕМУ
«РОБОТ КОСМІЧНОГО
ПРИЗНАЧЕННЯ, АНІМАЦІЯ
РУХІВ ЛАНОК»
Виконав: студент группи ТР-23м-1
Стешенко В.М.
Керівник: керівник кафедри механотроніки
Сокол Г.І.
2.
МЕТА РОБОТИМетою цієї кваліфікаційної роботи було дослідження
робота космічного призначення, створення кінематичної
схеми, проведення розрахунків характеристик та розробка
анімації
рухів
ланок
маніпулятора.
Використання
програмного середовища «1С: Математичний конструктор».
3.
ДЛЯ ДОСЯГНЕННЯ МЕТИ ТРЕБА ВИРІШИТИТАКІ ЗАДАЧІ:
Вибрати кінематичну, функціональну та
структурну схему робота
Провести кінематичний й силовий аналіз
Побудувати плани положень, швидкостей і
прискорень
Створити анімацію рухів ланок механізму
4.
ЗАГАЛЬНА ЧАСТИНАУ загальній частині розглянуто сучасні роботи космічного призначення,
їх функції та конструкцію.
5.
Планетохід«Місячник-1»
Марсохід
«Суінджер»
Планетохід
«Unary rover»
Планетохід
«Опортуніті»
Планетохід
«К'юріосіті»
«Robonaut-2»
6.
РОБОТ КОСМІЧНОГО ПРИЗНАЧЕННЯ«ROBONAUT-2»
7.
СПЕЦІАЛЬНІЙ ЧАСТИНАУ цій частині представлено кінематичну схему робота та
чотириланковий механізм, розрахунок яких підтвердив їхню
ефективність.
8.
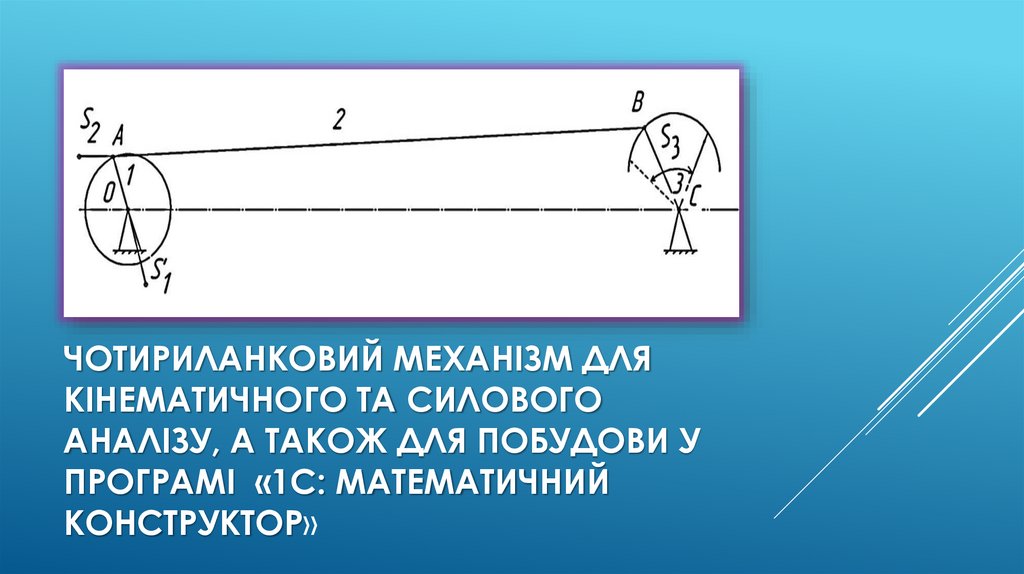
ЧОТИРИЛАНКОВИЙ МЕХАНІЗМ ДЛЯКІНЕМАТИЧНОГО ТА СИЛОВОГО
АНАЛІЗУ, А ТАКОЖ ДЛЯ ПОБУДОВИ У
ПРОГРАМІ «1С: МАТЕМАТИЧНИЙ
КОНСТРУКТОР»
9.
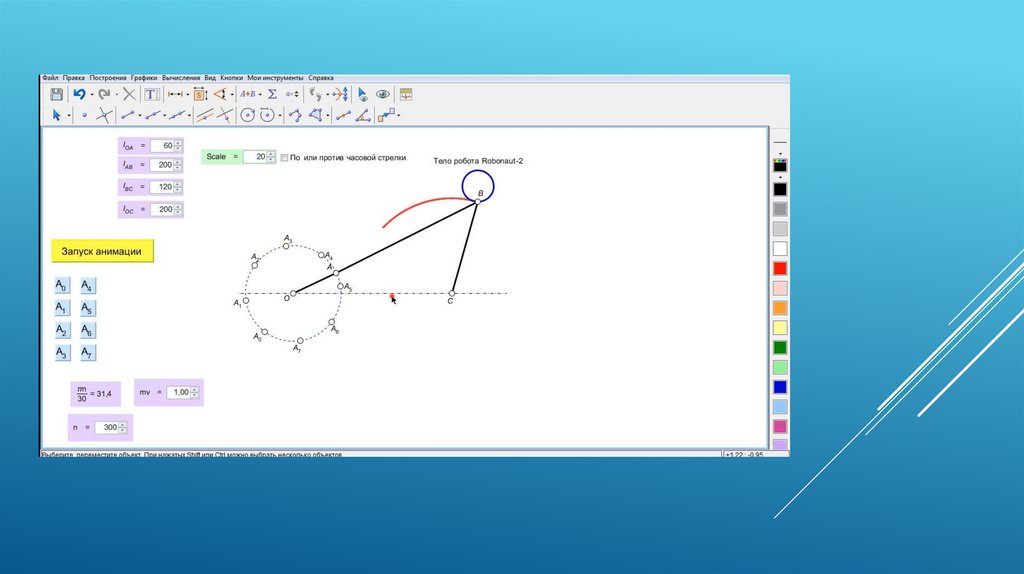
НАУКОВО-ДОСЛІДНА ЧАСТИНАПрограма «1С: Математичний конструктор» допомогла візуалізувати
траєкторії рухів ланок і оцінити їхню стабільність.
10.
ВИКОНАНО У ПРОГРАМІ1С:МАТЕМАТИЧНИЙ КОНСТРУКТОР
11.
12.
13.
ОХОРОНА ПРАЦІОкрім технічних аспектів, я врахував і безпеку. Аналіз показав, що
потрібно мінімізувати шум, забезпечити електробезпеку та створити
належне освітлення.
14.
ВИСНОВКИМоя робота дозволила визначити оптимальну кінематичну схему
механізму, створити анімацію рухів ланок, провести аналіз
кінематичних і силових характеристик.