



 industry
industrySimilar presentations:










Система управления промышленным робототехническим комплексом аналитического контроля химического состава металла
1.
Ф Г Б ОУ ВО М ос ко вс к и й гос уд а р с т ве н н ы йтех н оло г и ч ес к и й ун и ве р с и т е т « СТА Н К И Н »
Кафедра «Робототехника и мехатроника»
Институт «Автоматизация и робототехника»
Курс: «Роботы, мехатроника и робототехнические системы»
ROBOTIZATION PROBLEMS OF ANALYTICAL CONTROL OF THE MELTS CHEMICAL
COMPOSITION IN METALLURGY
Выполнил:
аспирант группы АСП-20-02
Снопков Алексей Владимирович
Научный руководитель:
д.т.н., профессор Пряничников Валентин Евгеньевич
Москва 2023
2.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
Введение
В процессе работы промышленных робототехнических комплексов аналитического контроля
химического состава металла актуальной проблемой остаётся влияние человеческого фактора
в процессах взятия образца металла и его подготовки к анализу, что нередко приводит к
ошибкам в работе автоматизированных систем аналитического контроля.
(Промышленный) робототехнический комплекс [(industrial) robot system]: Комплекс, состоящий из промышленного
робота (3.6), рабочего органа (органов) (4.12), датчиков на рабочем органе и оборудования (например, системы
технического зрения, устройства для нанесения покрытия, сварочного контроллера), необходимого для выполнения
задач по назначению, а также программы выполнения задания.
[ГОСТ Р 60.0.0.4–2023, 3.9]
Промышленный poбoт (industrial robot): Автоматически управляемый, перепрограммируемый, универсальный
манипулятор (4.14), программируемый по трем или более степеням подвижности, который может быть установлен
стационарно либо на мобильной платформе (4.16) для применения в прикладных задачах автоматизации в
промышленной среде.
[ГОСТ Р 60.0.0.4-2023, п. 3.7.]
2/9
3.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
При выплавке сталей для поддержания качества продукции необходимо перед
охлаждением расплава [1] проводить аналитический контроль исходного образца [2]
сплава, который подтвердит, что химический состав соответствует ожидаемому для этой
марки стали.
Проводить аналитический контроль необходимо за как можно меньшее время по причине
высоких затрат на поддержание температуры расплава и с максимальной точностью, по
причине большого влияния химического состава сплавов на их дальнейшие
эксплуатационные характеристики [3].
3/9
4.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
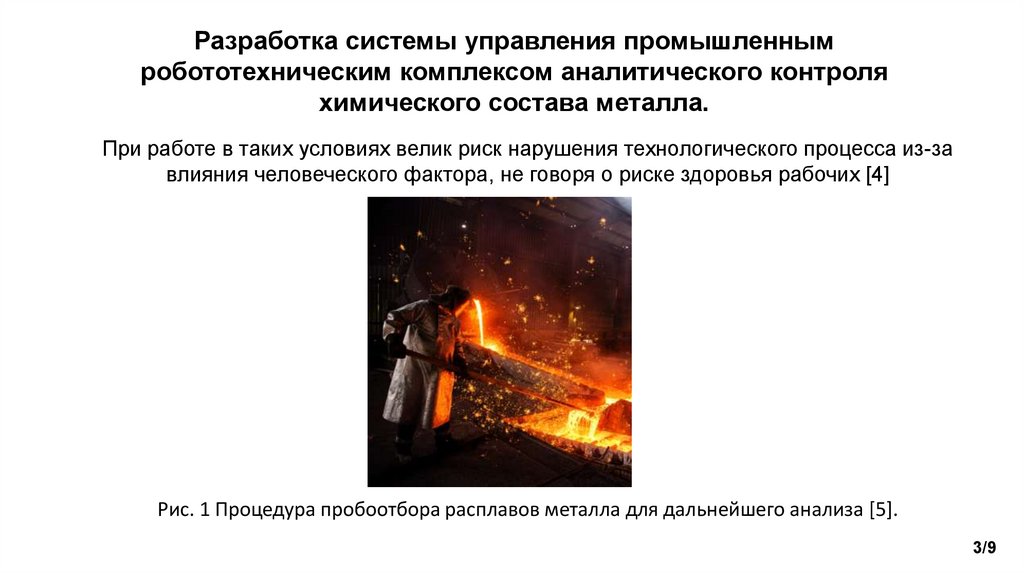
При работе в таких условиях велик риск нарушения технологического процесса из-за
влияния человеческого фактора, не говоря о риске здоровья рабочих [4]
Рис. 1 Процедура пробоотбора расплавов металла для дальнейшего анализа [5].
3/9
5.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
Необходимость оперативно получать высокоточные лабораторные анализы в условиях
производства привели к созданию автоматизированных систем аналитического контроля
химического состава металлов [6] (рис.2,3,4). В таких системах анализ образцов металла,
ранее проводившийся обученным персоналом в лабораторных условиях выполняет
автоматика в условиях плавильного цеха.
На сегодняшний день ведущими
производителями таких систем являются «Термо Техно Инжиниринг»[6], «HERZOG» [7], «ARL» [8]
«flsmidth»[9] и другие.
Рис. 2 Автоматизированная лаборатория
«Термо Техно Инжиниринг»
Рис. 3 Автоматизированная лаборатория
«ARL»
Рис. 4 Автоматизированная лаборатория
«flsmidth»
3/9
6.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
Такие сложные системы в большинстве случаев состоят из схожего ряда подсистем,
каждая из которых способна выполнять свои задачи самостоятельно. На рисунке 5 описан
обобщённый состав автоматизированной системы аналитического контроля на примере
контейнерной лаборатории «Термо Техно Инжиниринг» (рис.5).
Рис. 5 Обобщённый состав
автоматизированной контейнерной
лаборатории «Термо Техно
Инжиниринг»[11]:
1 – блок регистрации образцов;
2 – манипуляционный робот;
3 – блок пробоподготовки;
4 – блок спектрального анализа;
5 – система технического зрения;
6 – блок хранения проб.
3/9
7.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
Однако большинство подобных систем анализируют образцы металла, которые отбираются
и подготавливаются к анализу в процессе ручного труда. Влияние человеческого фактора
во время процедур взятия образца металла и его подготовки к анализу нередко приводят к
ошибкам в работе автоматизированных систем аналитического контроля.
Рис. 3 Процесс пробоотбора и пробоподготовки
3/9
8.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
К примеру, при нарушении процесса охлаждения металл пробы может испытать
перекаливание (рис. 4 п.3), что негативно влияет на точность результатов анализа. Не
менее важно соблюдать технологический процесс отсечения литника пробы, неправильно
отсечённый литник (рис 4 п.4) может помешать захвату пробы манипулятором
автоматизированной контейнерной лаборатории.
Рис. 4 Проба для спектрального анализа: 1 в момент пробоотбора; 2 после отделения от
пробоотборника [9]; 3 после охлаждения; 4 после отсечения литника пробы.
3/9
9.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
3/9
10.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
В данной работе предлагается исследование качественных и количественных
характеристик объектов манипулирования при различных подходах к тактильному
очувствлению схвата, различных способов фильтрации данных и выработке оптимального
подхода к управлению манипулятором промышленного робота с тактильной обратной
связью при использовании недорогих и распространённых тензорезистивных датчиков.
3/9
11.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
Цель:
Цель диссертационной работы состоит снижении влияния человеческого фактора на работу
промышленных робототехнических комплексов аналитического контроля химического
состава металла
Объект исследования:
Объектом диссертационного исследования является фильтрация и обработка данных с
датчиков тактильного очувствления в момент захвата хрупкого объекта схватами
манипуляторов различных конструкций .
Предмет исследования:
Предметом разработки являются зависимость качественных и количественных
характеристик захвата хрупкого объекта манипулирования от выбора подхода к фильтрации
и обработке данных, получаемых с датчиков тактильного очувствления.
Гипотеза: Повышение точности работы схватов с тактильным очувствлением возможно не
только при использовании более точных и дорогих сенсоров, но и при использовании
мультисенсорной системы обработки данных на базе простых тензорезистивных датчиков .
4/9
12.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
Своевременное обнаружение объекта при выполнении задачи захвата схватом
манипулятора решается путём использования мультисенсорной системы обработки данных
на базе массива тензорезистивных датчиков, различных методов программной фильтрации
сигналов этих датчиков, сложных алгоритмов обработки данных, а так же применением
материалов с естественной податливостью в конструкции схвата.
5/9
13.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
Решения, которые применены в данной работе отличаются комплексностью,
объединяя различные подходы к реализации задач исследования
Научная новизна обусловлена результатами исследований сравнительных
характеристик захвата объектов при различных подходах к очувствлению
данного схвата.
{Диссертация на соискание учёной степени кандидата наук должна быть «научноквалификационной работой, в которой изложены новые научно обоснованные
технические, технологические или иные решения и разработки, имеющие
существенное значение для развития страны»
Новые решения, предложенные соискателем, должны быть строго
аргументированы и критически оценены по сравнению с известными
решениями.}
6/9
14.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
Полученные новые научные результаты и методологические обоснования:
имеют научно-практическую ценность и содержат конструктивные
предложения по применению в областях промышленного, медицинских,
патрульных роботов, в разработке роботов-аватаров, экзоскелетов верхних
конечностей и иных областях, где требуются человеко-машинные интерфейсы
с тактильной обратной связью.
7/9
15.
Разработка системы управления промышленнымробототехническим комплексом аналитического контроля
химического состава металла.
Список использованной литературы
1.
2.
3.
4.
5.
6.
7.
8.
9.
ГОСТ Р ИСО 14284-2009 п3.4
ГОСТ Р ИСО 14284-2009 п3.14
ГОСТ 7565-81 (ИСО 377-2-89) п1.1
Головина Е.И. Опасные и вредные факторы литейного производства и их влияние на состояние атмосферы в рабочей зоне // Вестник Казанского
технологического университета. 2016. №23.
Процедура пробоотбора https://uralsteel.com/media/
https://www.thermotechno.ru/catalog/312/597/
https://www.herzog-maschinenfabrik.de/ru/produkcija/standartnaja-avtomatizacija/metallab/
WWW.KRSK.KP.RU: https://www.krsk.kp.ru/daily/26272/3149953/
https://www.flsmidth.com/en-gb/customer-stories/ese-odin-vladelec-sahty-pozinaet-plody
10. Д. Е. Охоцимский, С. С. Камынин, С. И. Гримайло и др. « Реализация сборочных операций на роботе ПРАГМА А-3000» Препринты ИПМ им. М.В.
Келдыша. — 1985. — № 82. — С. 1–47.
11. Д. Е. Охоцимский, В. А. Сарычев, Ю. А. Садов и др., «Моделирование на ЭВМ управления роботом-манипулятором» Препринты ИПМ им. М.В.
Келдыша. — 1974. — № 104. — С. 1–41.
12. Д. Е. Охоцимский, Е. Ю. Зуева, М. М. Комаров и др., «Моделирование на ЭВМ интегрального робота, производящего укладку деталей по чертежу»
Известия Академии наук СССР. Техническая кибернетика. — 1980. — № 4. — С. 73–80.
13. И. Р. Белоусов, А. А. Богуславский, С. Н. Емельянов и др., «Взаимодействие робота-манипулятора с подвижными объектами» Известия Российской
академии наук. Механика твердого тела. — 2001. — № 1. — С. 194–204.
14. Д. Е. Охоцимский, С. И. Гримайло, С. С. Камынин, Е. И. Кугушев, «Адаптивное управление роботом на основе простейших средств очувствления» //
Препринты ИПМ им. М.В. Келдыша. — 1986. — № 45. — С. 1–26.
15. И. Р. Белоусов, А. И. Богуславский, Г. К. Боровин, С. Н. Емельянов, М. М. Комаров, Д. Е. Охоцимский, А. К. Платонов, В. В. Сазонов, С. М. Соколов,
“Автоматический захват подвижного объекта роботом-манипулятором”, Препринты ИПМ им. М. В. Келдыша, 1996, 078
16. Гримайло С. И., Кугушев Е. И., Ярошевский В. С. Цифровая следя щая система для управления манипуляторами в процессе сборки // Препринты
ИПМ им. М.В. Келдыша. — 1982. — № 98. — С. 1–28.
17. Барбашова Т. Ф., Кугушев Е. И. Определение веса предмета в схвате при управлении движением манипулятора // Препринты ИПМ им. М.В.
Келдыша. — 1983. — № 3. — С. 1–28.
18. Гримайло С. И., Кугушев Е. И., Камынин С. С. Программное обеспечение манипуляторов с очувствленными схватами // Препринты ИПМ им. М.В.
Келдыша. — 1981. — № 104. — С. 1–26.
8/9
16.
Ф Г Б О У ВО М о с к о вс к и й г о с уд а р с т в е н н ы йт е х н ол о г и ч е с к и й у н и в е р с и т е т « СТА Н К И Н »
Кафедра «Робототехника и мехатроника»
Институт «Автоматизация и робототехника»
Курс: «Роботы, мехатроника и робототехнические системы»
Разработка системы управления промышленным
робототехническим комплексом аналитического контроля
химического состава металла.
(Специальность 2.5.4: «Роботы, мехатроника и робототехнические системы»)
СПАСИБО ЗА ВНИМАНИЕ
Выполнил:
аспирант группы АСП-20-02
Снопков Алексей Владимирович
Научный руководитель:
д.т.н., профессор Пряничников Валентин Евгеньевич
Москва 2023