









































































































































































































































































































































































 law
law industry
industrySimilar presentations:



")






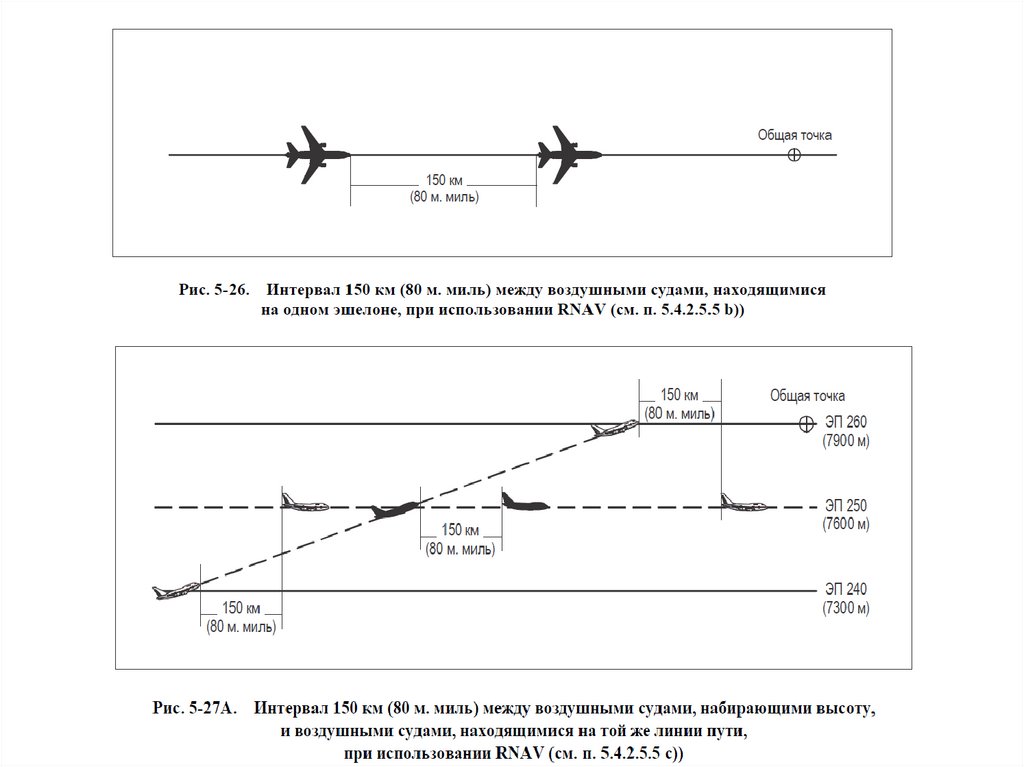
Документы ИКАО ОВД. Правила аэронавигационного обслуживания
1.
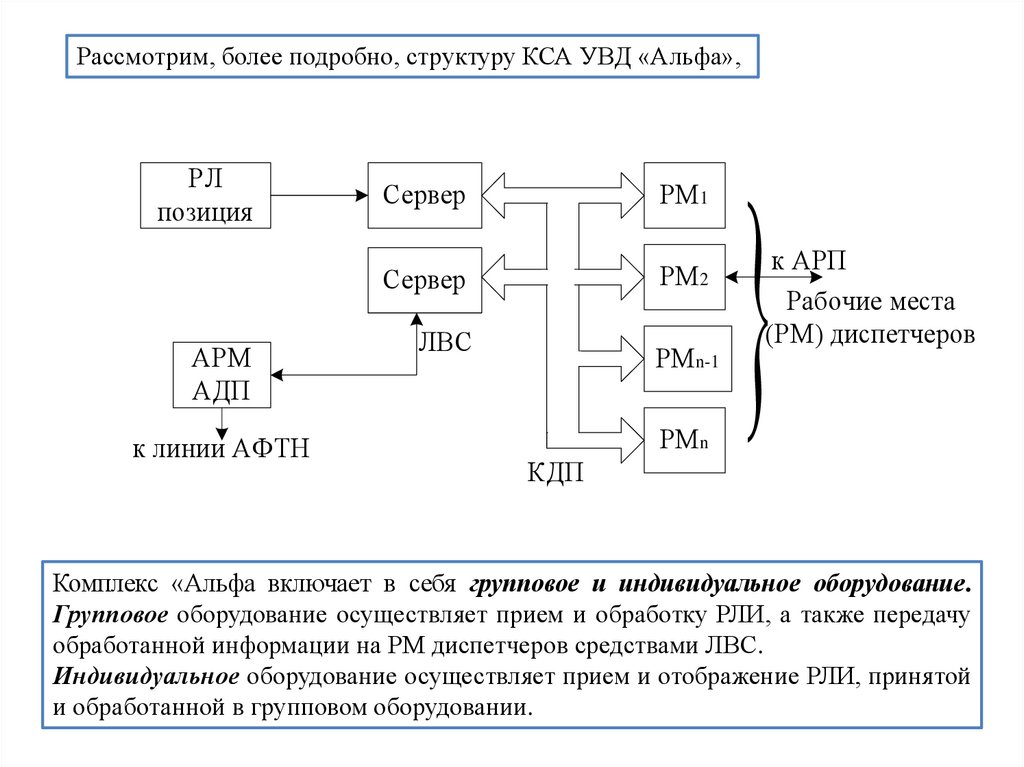
Автоматизированные системыуправления воздушным движением
– АС УВД
2.
УЧЕБНО-МЕТОДИЧЕСКОЕ И ИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕДИСЦИПЛИНЫ
а) литература
1. АС УВД. Под ред. Ю.Г. Шатракова, СПб.: ГУАП, 2013.
2. Логвин А.И., .Епифанцева Д.А Автоматизированные системы управления
воздушным движением. Учебное пособие. М.: МГТУ ГА, 2009.
3. Автоматизированные системы уравления воздушным движением. Новые
информационные технологии в авиации. Под. ред. С.Г.Пятко и А.И.Красова СПб: Политехника, 2004.
4. Рудельсон Л.Е. Программное обеспечение автоматизированных систем
управления воздушным движением. 3ч. Учебное пособие. - М.: МГТУ ГА, 20072009.
5. Логвин А.И. Автоматизированные системы управления воздушным
движением: пособие по проведению практических занятий. – М.: МГТУ ГА,
2013.
б) программное обеспечение и Интернет-ресурсы
- электронные ресурсы библиотеки Университета - электронные версии
пособий, методических разработок, указаний и рекомендаций по всем видам
учебной работы.
3.
ДОКУМЕНТЫВоздушный кодекс Российской Федерации
Указ Президента РФ от 11.09.2009 N 1033 (ред. от 11.03.2016) "О мерах по совершенствованию
государственного регулирования в области авиации»
Указ Президента РФ от 05.09.2005 N 1049 (ред. от 12.05.2008) "О Федеральной
аэронавигационной службе» Документ утратил силу в связи с изданием
Указа Президента РФ от 11.09.2009 N 1033.
• Постановление Правительства РФ от 30.07.2004 N 395 (ред. от 27.09.2016 не вступила в силу)
"Об утверждении Положения о Министерстве транспорта Российской Федерации" – раздел
5.2.53 ГА.
• Приказ от 14 октября 1999 г. №80 о создании и внедрении системы радиовещательного
автоматического зависимого наблюдения в гражданской авиации России.
• Приказ Минтранса России от 21.04.2015 N 152 "Об утверждении Положения об управлении
реализацией федеральной целевой программы "Модернизация Единой системы организации
воздушного движения Российской Федерации (2009 - 2020 годы).
• Постановление Правительства РФ от 28.08.2015 N 901 "О Единой системе организации
воздушного движения Российской Федерации» (вместе с "Положением о единой системе
организации воздушного движения Российской Федерации").
• Приказ министерства транспорта Российской Федерации №293 от 25.11.2011 г. (ред. от
21.07.2016) "Организация воздушного движения в Российской Федерации.
• Приказ Министерства транспорта Российской Федерации от 20.10.2014 г. № 297 «Об
утверждении Федеральных авиационных правил «Радиотехническое обеспечение полетов
воздушных судов и авиационная электросвязь в гражданской авиации» (взамен ФАП №115)
• Приказ Росавиации от 25.04.2016 N 282 «Об утверждении перечня оперативных органов
Единой системы организации воздушного движения Российской Федерации»
• Приказ министерства транспорта Российской Федерации от 16.01.2012 г. №6 «Организация
планирования использования воздушного пространства Российской Федерации»
4.
• Постановление правительства Российской Федерации №138 от 11.03.2010 г. (ред. от 12.07.2016) "Обутверждении Федеральных правил использования воздушного пространства Российской Федерации.
• Приказ Минтранса России от 26.09.2012 N 362 (ред. от 09.11.2016) "Об утверждении Федеральных
авиационных правил "Порядок осуществления радиосвязи в воздушном пространстве Российской
Федерации"
• Приказ Минтранса России от 25.09.2015 N 286 "Об утверждении Федеральных авиационных правил
"Требования к операторам аэродромов гражданской авиации. Форма и порядок выдачи документа,
подтверждающего соответствие операторов аэродромов гражданской авиации требованиям
федеральных авиационных правил"
• Приказ Минтранса России от 16.09.2015 N 274 (ред. от 06.09.2016) "Об утверждении маршрутов обслуживания
воздушного движения«
• Приказ Минтранса России от 15.03.2016 N 64 (ред. от 08.12.2016) "Об утверждении границ зон (районов)
Единой системы организации воздушного движения Российской Федерации, границ районов аэродромов
(аэроузлов, вертодромов), границ классов A, C и G воздушного пространства.
• Приказ Минтранса России от 01.11.2016 N 309 "О признании не подлежащим применению приказа
Федеральной аэронавигационной службы от 26 ноября 2007 г. N 116 "Об утверждении федеральных
авиационных правил "сертификация объектов единой системы организации воздушного движения»
• Приказ Минтранса России от 09.07.2012 N 208 Об утверждении Административного регламента
Федерального агентства воздушного транспорта предоставления государственной услуги по
аэронавигационному обслуживанию пользователей воздушного пространства Российской Федерации.
• Приказ министерства транспорта Российской Федерации №128 от 31.07.2009 г. (ред. от 15.06.2015)
"Подготовка и выполнение полетов в гражданской авиации Российской Федерации" (взамен ФАП
№108)
5.
• Приказ министерства транспорта Российской Федерации №31 от 18.04.2005 г. "Объекты единойсистемы организации воздушного движения»
• Приказ министерства транспорта Российской Федерации №262 от 25.08.2015 г. "Требования,
предъявляемые к аэродромам, предназначенным для взлета, посадки, руления и стоянки гражданских
воздушных судов
• Приказ Федеральной аэронавигационной службы № 119 от 28 ноября 2007 г. "Об утверждении
Федеральных авиационных правил "Размещение маркировочных знаков и устройств на зданиях,
сооружениях, линиях связи, линиях электропередачи, радиотехническом оборудовании и других
объектах, устанавливаемых в целях обеспечения безопасности полетов воздушных судов»
• Приказ министерства транспорта Российской Федерации №117 от 20.04.2011 г. "Летные проверки
наземных средств радиотехнического обеспечения полетов, авиационной электросвязи и систем
светосигнального оборудования гражданской авиации" (с изменениями приказа №1 от 18.01.2005 г.)
• Приказ Минтранса РФ №52 от 10.03.2016 г. О внесении изменений в Перечень и содержание вопросов
для проведения проверки знаний кандидата на получение свидетельства диспетчера управления
воздушным движением, утвержденный приказом Министерства транспорта.
• Приказ Минтранса России от 10.02.2014 N 32 "Об утверждении Федеральных авиационных правил
"Требования, предъявляемые к оформлению и форме свидетельств авиационного персонала
гражданской авиации»
• Приказ Минтранса России от 27.02.2014 ( ред. 10.03.2016) N 56 "Об утверждении перечня и
содержания вопросов для проведения проверки знаний кандидата на получение свидетельства
диспетчера управления воздушным движением. В соответствии с Пост. Правительства Российской
Федерации от 6 августа 2013 г. N 670
6.
• Росаэронавигация. ФГУП ГосНИИ "Аэронавигация". Методика по определениюнормативной численности персонала службы ЭРТОС.
• Перечень наименований сфер деятельности юридических лиц, осуществляющих
и обеспечивающих аэронавигационное обслуживание пользователей воздушного
пространства
Российской
Федерации,
и
областей применения объектов ЕС ОрВД. Утвержден Росавиацией 04.02.2011 г..
• Нормы проектирования командно-диспетчерских пунктов в аэропортах ВСН 1086
Ведомственные строительные нормы. Нормы проектирования объектов
управления воздушным движением, радионавигации и посадки. ВСН 7-86 МГА..
• Распоряжение о внесении изменений в распоряжение министерства транспорта
Российской Федерации от 24 августа 2005 г., №ИЛ-79-Р (Распоряжение
Минтранса России от 29.062012 № МС-82-Р).
• Разъяснение по порядку заполнения подаваемых юридическим лицом заявки и
доказательной документации для оценки соответствия требованиям ФАП
"Требования к юридическим лицам, осуществляющим аэронавигационное
обслуживание полетов воздушных судов пользователей воздушного пространства
Российской
Федерации.
Форма
и
порядок
получения
документа,
подтверждающего соответствие юридических лиц указанным требованиям" по
направлению аэронавигационного обслуживания "обеспечение авиационной
элетросвязью (предоставление радионавигационных средств, систем связи и
систем наблюдения)«
• Сертификаты типа на радиотехническое оборудование центров УВД, аэродромов
и воздушных трасс
7.
Документы ИКАООВД Правила аэронавигационного обслуживания. Dok 4444
Руководство по ОВЧ-линии цифровой связи (VDL) режима 2 Doc 9776
Справочник по спектру радиочастот для нужд гражданской авиации. Том 1.Doc 9718 AN/957
Справочник по спектру радиочастот для нужд гражданской авиации. Том II Doc 9718 AN/957
Приложение 10 Авиационная электросвязь. Том I. Радионавигационные средства
Приложение 10. Том II. Правила связи, включая правила, имеющие статус РАNS
Приложение 10 Том III. Часть I. Системы передачи цифровых данных; Часть II. Системы речевой
связи
Приложение 10 Том IV. Системы наблюдения и предупреждения столкновений
Руководство по авиационной подвижной спутниковой (маршрутной) службе Doc 9925
Руководство по авиационному наблюдению Doc 9924
Руководство по сети авиационной электросвязи (ATN), использующей стандарты и протоколы пакета
протоколов Интернет (IPS) Doc 9896
Руководство по глобальным характеристикам аэронавигационной системы Doc 9883
Руководство по испытаниям радионавигационных средств. Том III Испытания обзрных
радионавигационных систем Doc 8071
Руководство по требуемым характеристикам связи (RCP) Doc 9869
Руководство по приемопередатчику универсального доступа (UAT) Doc 9861
Руководство по глобальной навигационной спутниковой системе (GNSS) Doc 9849
Руководство по специальным услугам режима S Doc 9688
Руководство по вторичным обзорным радиолокационным (ВОРЛ) системам Doc 9684
Руководство по испытаниям радионавигационных средств Том I Испытания наземных
радионавигационных систем Doc 8071
Руководство по испытаниям радионавигационных средств Том II Испытания спутниковых
радионавигационных систем Doc 8071
Авиационная электросвязь Том V Использование авиационного радиочастотного спектра
Приложение 10
8.
Список условных сокращенийАДП – аэродромно-диспетчерский пункт;
АЗН – автоматическое зависимое наблюдение;
АЗН-В – АЗН в радиовещательном диапазоне;
АКДП – аэродромный командно-диспетчерский пункт;
АПОИ – аппаратура первичной обработки информации;
АРМ – автоматизированное рабочее место;
АРП – автоматический радиопеленгатор;
АС – автоматизированная система;
АТС – автоматическая телефонная станция;
АФТН – авиационная фиксированная сеть электросвязи;
БСПС – бортовая система предупреждения столкновения;
БУ – блок управления;
ВД – воздушное движение;
ВО – воздушная обстановка;
ВП – воздушное пространство;
ВРЛ – вторичный радиолокатор;
ВРЦ – вспомогательный районный центр;
ВС – воздушное судно;
ГА – гражданская авиация;
ГЦ – главный центр;
ДВО – динамическая воздушная обстановка;
ЕС – единая система;
ЗЦ – зональный центр;
ИВО – индикатор воздушной обстановки;
ИВП – использование воздушного пространства;
ИВС – информационно-вычислительна система;
ИКМ – импульсно-кодовая модуляция;
КДП – командно-диспетчерский пункт;
9.
КС – конфликтная ситуация;КСА – комплекс средств автоматизации;
ЛВС – локальная вычислительная сеть;
ЛПД – линия передачи данных;
МДП – местный диспетчерский пункт;
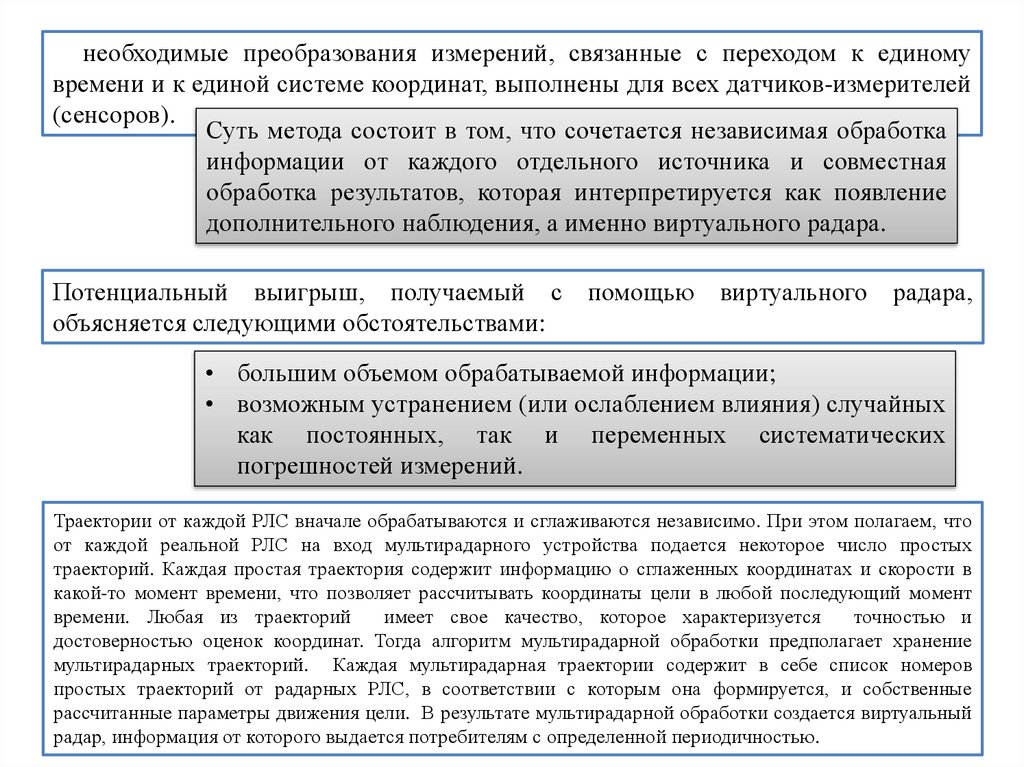
МРТ – мультирадарная траектория;
МСРП – многоканальная система регистрации параметров;
МЦ АУВД – Московский центр автоматизированного управления воздушным движением;
НПП – наставление по производству полетов;
ОВД – обслуживание воздушного движения;
ОрВД – организация воздушного движения;
ОРЛ-Т – обзорный радиолокатор трассовый;
ОРМ – оборудование рабочего места (диспетчера);
ПВД – планирование воздушного движения;
ПКС – потенциально конфликтная ситуация;
ПОД – пункт обязательного донесения;
ППЛ – предварительный план полетов;
ППЦ – приемо-передающий центр;
ПРЛ – первичный радиолокатор;
ПРМЦ – приемный радиоцентр;
ПРЦ – передающий радиоцентр;
РЛ – радиолокатор;
РЛИ – радиолокационная информация;
РЛК – радиолокационный комплекс;
РЛП – радиолокационная позиция;
РЛС – радиолокационная станция;
РМ – рабочее место;
РС – радиостанция связи;
РТОП – радиотехническое обеспечение полетов;
10.
РТС – радиотехнические средства;РЦ – районный центр;
СЕВ – система единого времени;
СИП – справочно-информационная система;
СПИ – совмещенный план-индикатор;
СРНС – спутниковая радионавигационная система;
СРС – система речевой связи;
ТТХ – тактико-технические характеристики;
ФАП – Федеральные авиационные правила;
ФГУП – Федеральное государственное унитарное предприятие;
ЦКС – центр коммутации сообщений;
ЦУП – центр управления полетами.
11.
16 февраля 2017г. исполнилось 67 лет дня издания Постановления ЦК КПСС иСовета Министров СССР от 16.02.1973г. № 130–49 «О мерах по повышению
безопасности полетов гражданской авиации», в соответствии с которым наряду с
другими мероприятиями Министерству обороны СССР предписывалось создать в
стране Единую систему управления воздушным движением гражданской
авиации, отвечающей требованиям мирного и военного времени. Указанная дата
считается началом создания в стране Единой системы (ЕС) организации
воздушного движения (ОрВД).
Во исполнение Постановления № 130–49 была построена Система с
иерархической трехуровневой структурой, включающая в себя Главный центр
(ГЦ) ЕС управления воздушного движения (УВД), шесть зональных центров (г.г.
Москва, Ленинград, Минск, Киев, Ростов-на-Дону, Куйбышев) и 22 районных
центра (РЦ), каждый из которых состояли из гражданского и военного секторов,
размещаемых совместно. РЦ
были организованы на основе районных
диспетчерских пунктов, подведомственных Министерству гражданской авиации,
а зональные – на основе командных пунктов объединений, подведомственных
Министерству обороны.
Единая системы УВД на всей территории страны практически стала
функционировать с начала 1983года и включала в своем составе один Главный,
двадцать зональных (с учетом вспомогательных) и 189 районных (с учетом
вспомогательных) центров.
12.
Следующим шагом в интересах построения рациональной структурыгосударственного управления гражданской авиации (ГА) и воздушным движением
(ВД) явилось издание Указа Президента РФ от 15 марта 1996г. №382 «О
совершенствовании системы государственного управления транспортным
комплексом РФ» (Документ утратил силу в связи с изданием Указа Президента
РФ от 09.08.2000 N 1476.) и принятие Постановления Правительства РФ от
14 мая 1996г. №583 «Вопросы федеральной авиационной службы России» (ред.
от 25.07.2000). На основании этого Постановления в целях повышения
безопасности и регулярности полетов, а также в интересах формирования единой
хозяйственной системы УВД в 1996 году было создано Федеральное
государственное унитарное предприятие по организации воздушного движения –
ФГУП «Государственная корпорации по ОрВД».
Указом Президента РФ от 5 сентября 2005г. №1049 была образована
Федеральная аэронавигационная служба (Росаэронавигация) (отменен Указом
Президента РФ от 11.09.2009 N 1033 (ред. от 11.03.2016) "О мерах по
совершенствованию государственного регулирования в области авиации»), на
которую была возложена вся полнота ответственности за государственное
регулирование использования воздушного пространства (ИВП), а также
осуществление функций по решению всего комплекса задач по ИВП и
аэронавигационному облуживанию полетов воздушных судов (ВС), определенных
воздушным законодательством РФ (прежде всего Воздушным кодексом РФ).
13.
Современная Аэронавигационная система России предназначена для обеспеченияэффективного и безопасного ИВП, аэронавигационного обслуживания его
пользователей, авиационно-космического поиска и спасения. Она осуществляет
свою деятельность на всей территории РФ, а также за ее пределами в соответствии с
международными договорами.
Включает в себя:
• единые системы ОрВД и авиационно-космического поиска и спасения,
• службу аэронавигационной информации,
• систему метеорологического обслуживания аэронавигации с их персоналом
• наземные, бортовые, спутниковые средства связи, навигации, посадки,
наблюдения, поиска и спасения, информации и обслуживания.
Приказ Минтранса России от 21.04.2015 N 152 "Об утверждении Положения об
управлении реализацией федеральной целевой программы "Модернизация Единой
системы организации воздушного движения Российской Федерации (2009 - 2020
годы) является важнейшим инструментом для дальнейшего совершенствования
Единой системы и развитии в целом Аэронавигационной системы России, что
позволит практически укрепить систему организации ИВП РФ и аэронавигационного
обслуживания, в том числе в зонах ее международной ответственности, в интересах
эффективного использования этого пространства всеми пользователями, обеспечения
национальной безопасности и развития экономики государства.
14.
Важнейшим элементом модернизации ЕС ОрВД РФ является создание ивнедрение современных автоматизированных систем (АС) УВД и
автоматизированных систем ОрВД.
"Московский центр автоматизированного управления воздушным
движением" (МЦ АУВД) введён в эксплуатацию в 1981 году и предназначен
для обслуживания воздушного движения в Московском узловом
диспетчерском районе, на трассах и вне трасс в пределах Московской зоны
Единой системы организации воздушного движения (ЕС ОрВД). В 2006 году
введён филиалом в структуру ФГУП "Государственная корпорация по
организации воздушного движения в Российской Федерации" (Госкорпорация
по ОрВД).
Зона ответственности центра составляет 720 тыс. кв. км. Управление полётами
осуществляют аэроузловой и районный диспетчерский центры (АДЦ и РДЦ), а
также службы движения десяти центров ОВД. РДЦ обслуживает территорию
18 областей России. Зона ответственности протянулась от Великих Лук и
Беларуси до Республики Татарстан и от границ Украины до Вологды
15.
Программаиспытаний
новой
автоматизированной системы организации
воздушного
движения
(АС
УВД),
разработанной Концерном ВКО "АлмазАнтей", завершилась в Московском центре
автоматизированного управления воздушным
движением (МЦ АУВД, филиал ФГУП
"Госкорпорация по ОрВД"). Планируется, что
переход к новой АС будет осуществлён в
марте 2017 года, говорится в сообщении
пресс-службы Госкорпорации по ОрВД.
В ноябре 2016 года заместитель генерального директора ВКО "Алмаз-Антей" Дмитрий Савицкий
рассказал в интервью ТАСС, что старая система, введённая в эксплуатацию ещё в 1981 году,
безнадёжно устарела. Разработанная для МЦ АУВД система включает новое программное
обеспечение, а также новую технику: индикаторы воздушной обстановки, отказоустойчивые ЭВМ,
современные моноимпульсные адресные радиолокаторы для надёжного обнаружения воздушных
судов. у автоматизированной системы появились новые функции, позволяющие максимально
автоматизировать действия диспетчера. Кроме того, новая АС намного раньше предупреждает о
нарушениях эшелонирования: "В предыдущих системах предупреждение шло только о срочных
конфликтах - за одну-две минуты, сейчас определяются среднесрочные конфликты - за 20-30
минут"
Новая АС позволит увеличить пропускную способность Московского укрупнённого центра Единой
системы организации воздушного движения РФ (УЦ ЕС ОрВД) на 30-40%,
16.
Развитие системы УВДСистема УВД характеризуется скоротечностью процессов и невозможностью их
остановки, ограниченными возможностями человека, что диктует необходимость
автоматизации процессов УВД.
С развитием технических средств и методов самолетовождения развивалась и
система УВД. Под самолетовождением понимается комплекс действий экипажа и
работников наземных служб (движения, эксплуатации радиотехнического
оборудования и связи — ЭРТОС), направленных на обеспечение наибольшей
точности выполнения полета ВС по установленной трассе (маршруту) и
осуществление его посадки в заданном месте и в заданное время.
На первом этапе развития гражданской авиации (1925— 1950 гг.) ВС летали, как
правило, в условиях хорошей видимости, на малых высотах.
Скорости и дальности полета были небольшие. Для посадки ВС практически не
требовалось специально подготовленного аэродрома.
Пилот определял местоположение ВС визуально, ориентируясь относительно
пролетаемой местности. Диспетчерская служба, которая впервые была создана на
авиалинии Москва — Иркутск в 1929 г., укладывала посадочный знак и передавала
отдельные сообщения с помощью флажковой сигнализации, поддерживала
радиосвязь с экипажем.
17.
Антенна радиостанции "Брусника"18.
Типовой ламповый диспетчерский пульт. В наше время всё это оборудование заменяется ЖКмонитором, клавиатурой и мышкой.19.
В 1930 г. территория страны была разделена на диспетчерские районы вдольвоздушных трасс, число которых постоянно росло. В начале 30-х годов общая
протяженность авиалиний достигла почти 30000 км.
В 1934 г. в ряде аэропортов были установлены равносигнальные радиомаяки М-1
и радиомаркеры. Радиомаяки давали возможность экипажам летать по заданному
маршруту вне видимости Земных ориентиров.
В 1937 г. началось внедрение также радиопеленгаторов, радиокомпасов, а в 1939
г. была принята в эксплуатацию система слепой посадки СПН-3 «Ночь». В эти же
годы были введены в эксплуатацию коротковолновые радиопеленгаторы СПП-1.
После Великой Отечественной войны резко возросли воздушные перевозки, были
открыты новые авиалинии и аэропорты. На трассы вышли такие самолеты, как Ил12 со скоростью до 400 км/ч и дальностью полета 1900 км, Ил-14, Ан-2, Я к-12.
Оборудование большинства этих самолетов позволяло летать в сложных
метеоусловиях, в связи с чем уже в 1946 г. было смонтировано 20
радиопеленгаторов, 20 приводных и 30 командных радиостанций, 24 посадочные
станции и 17 светомаяков для обслуживания ночных полетов.
В 1950 г. была введена в эксплуатацию новая система посадки в сложных
метеоусловиях (СП-50).
20.
Структурная схема равносигнального радиомаяка21.
Принципы захода по РМСНаземная часть РМС состоит из двух
радиомаяков — курсового радиомаяка
(КРМ) и глиссадного радиомаяка (ГРМ),
которые излучают два наклонных луча
(равносигнальные зоны) в вертикальной и
горизонтальной плоскости. Пересечение
этих зон образует траекторию захода на
посадку. Самолетные приемные устройства
определяют
положение
самолета
относительно этой траектории и выдают
управляющие сигналы на команднопилотажный прибор ПКП-1 (авиагоризонт) и
планово-навигационный прибор ПНП-1
(указатель курса).
22.
Глиссадный радиомаяк создаетравносигнальную
зону
в
вертикальной
плоскости.
Направление этой равносигнальной
зоны
соответствует
траектории
снижения
самолета.
Равносигнальная зона, как можно
увидеть
на
рисунке
ниже,
сформирована двумя диаграммами
направленности,
по
которым
излучаются сигналы, отличающиеся
частотой
модуляции.
Ширина
равносигнальной зоны глиссадного
маяка составляет 0,8о. Дальность
действия около 25 км.
Расположение наземной радиоаппаратуры
на аэродроме.
На
аэродроме
устанавливается
группа
радиомаяков, которые позволяют правильно
выдерживать направление полета при посадке
(курсовой маяк), правильно проводить снижение
самолета (глиссадный маяк) и, кроме того,
фиксировать момент начала снижения и момент
пролета границы аэродрома (маркерные маяки).
23.
24.
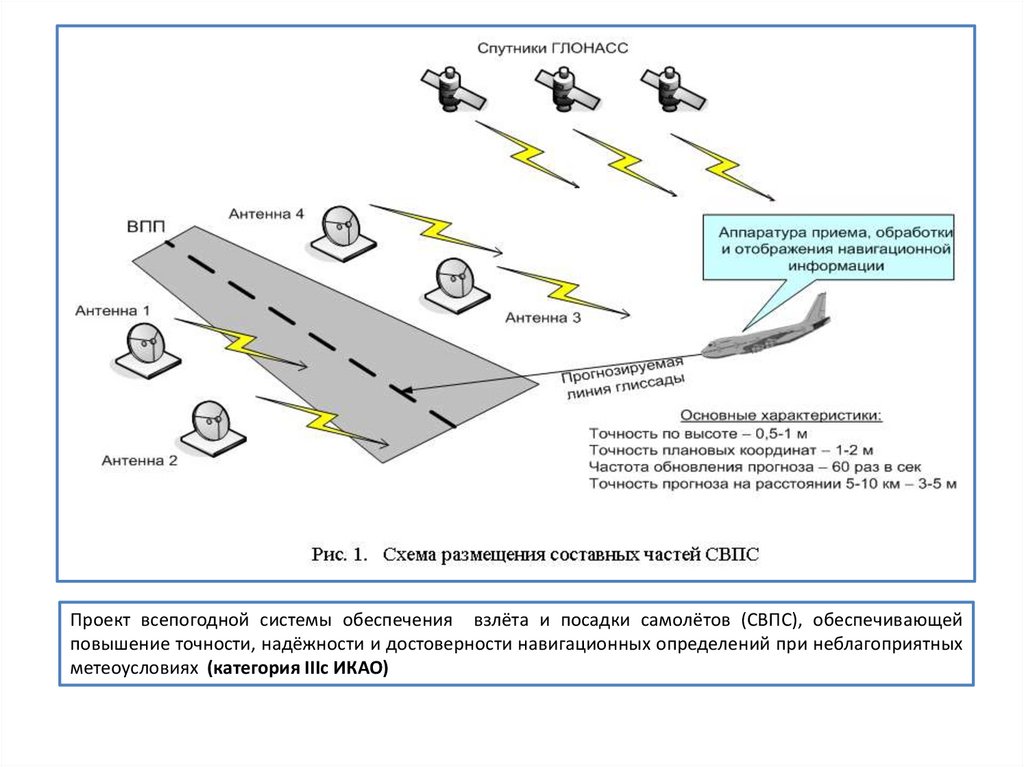
Проект всепогодной системы обеспечения взлёта и посадки самолётов (СВПС), обеспечивающейповышение точности, надёжности и достоверности навигационных определений при неблагоприятных
метеоусловиях (категория IIIс ИКАО)
25.
Сущность СВПС заключается в том, что навигационные определения по КНС«ГЛОНАСС»/GPS дополняются бортовой дальномерно-угломерной системой, которая в
условиях сплошной облачности на расстоянии 1км определяет точку посадки с
точностью 1м. При этом система посадки определяет с расстояния 100 км отклонение
ЛА от оси ВПП с точностью 3,6 угл. мин. При разработке СВПС основная нагрузка
ложится не на разработку и модернизацию средств измерений, а на разработку и
совершенствование программно-математического обеспечения (ПМО).
Выполняемые функции
• Определение с расстояния 200 км параметров движения в местной
топоцентрической системе координат на борту ЛА.
• Прогнозирование движения ЛА на заданный промежуток времени.
• Определение направления на точку приземления в горизонтальной и вертикальной
плоскостях.
• Расчёт траектории посадки (глиссады) с точки захода на посадку.
• Расчёт отклонения параметров движения от глиссады.
• Контроль параметров движения по 3D картам местности.
26.
27.
Разветвленная сеть авиалиний привела к необходимости перехода от трассовогометода организации УВД к площадному. В 1947 г. были созданы районы
диспетчерской службы (РДС) со специальными органами УВД в них —
районными диспетчерскими пунктами (РДП). Для контроля за воздушным
движением стали применяться первичные радиолокационные станции. РДП,
развернутые на трассах, оснащали средствами связи между собой (телеграф, КВрадиостанции).
Развитие системы УВД на втором этапе (середина 50-х — начало 70-х годов)
связано прежде всего с характерными особенностями новых реактивных
самолетов, (выполняющих полеты в сложных метеоусловиях на больших высотах.
Качественно изменяются принципы самолетовождения: сбор всей информации о
высоте, скорости, крене, тангаже и других параметрах полета почти полностью
переложен на приборы. Новое бортовое пилотажно-навигационное
оборудование не обеспечивает сокращение норм эшелонирования без наземных
средств слежения за движением ВС.
Основным средством получения информации о воздушной обстановке становятся
наземные радиолокационные станции. Высокие скороподъемность и
горизонтальные скорости полета в условиях большой плотности воздушного
движения потребовали оперативной передачи на землю информации о номере
ВС и высоте полета, что стало возможным с внедрением в конце 60-х годов
вторичной радиолокации (ВРЛ).
28.
Полеты самолетов реактивной авиации вызвали необходимость создания дляуправления воздушным движением значительно больших по своим размерам
Главных районов диспетчерской службы (ГРДС). УВД в этих районах
осуществляли Главные районные диспетчерские пункты (ГРДП), в которых при
высокой интенсивности полетов стали организовывать секторы управления.
Каждому сектору были выделены частоты для УКВ и КВ-радиосвязи.
Большие высоты полета и значительное число секторов УВД привели к
необходимости
внедрения
многоканальных
радиостанций
с
фиксированными частотами.
Установлены мощные радиопередатчики, ввод в эксплуатацию которых положил
начало организации радиотелетайпной связи. Увеличилось число
радиостанций с дистанционным управлением.
В 1958 г. без постоянного дежурного персонала работало уже 60% радиостанций
аэропортов. Получила дальнейшее распространение и проводная телеграфная
связь.
В 1956 г. начала эксплуатироваться система светосигнального оборудования
«Свеча-1», а в 1958 г.— система Д-1. Широкое распространение в аэропортах
получила инструментальная система посадки СП-50, а для обслуживания
рейсов иностранных авиакомпаний — система ILS.
29.
Ручной телефонный коммутатор и стойки с радиоэлектронным оборудованием второйполовины ХХ века.
30.
Аппаратура инструментальной системыпосадки СП-50Формирование линии курса посадки радиомаяки типа СП-50
31.
Курсовой радиомаяк системы посадки Thales ILS-410.32.
33.
34.
35.
Глиссадный радиомаяк системы посадки Thales ILS-41036.
37.
Определяети
выдает
навигационные параметры
местоположения
для:
полета воздушного судна
(ВС) по маршруту, привода
в заданную точку и захода
на посадку.
Комплекс РСБН-85
38.
Автоматическое зависимое наблюдение(АЗН)Комплекс АЗН-В(S)
39.
Для улучшения качества навигации в 1960 г. началось внедрение в эксплуатациюрадиотехнических систем ближней навигации, имеющих значительно лучшую
точность определения местонахождения, чем другие средства навигации.
В середине 50-х годов - внедрение автоматизированных систем (АС) УВД.
Причина перехода к автоматизации УВД:
• интенсивный рост авиаперевозок, увеличение числа одновременно
находящихся в воздухе высокоскоростных ВС стали приводить к
появлению столь сложных ситуаций, при которых «ручные» методы
управления с использованием отдельных радиотехнических средств
оказались малоэффективными, не способными обеспечить
решение
системой УВД задач безопасности, экономичности и регулярности полетов;
• ограниченные возможности диспетчеров УВД по планированию,
управлению и контролю воздушного движения стали приводить к
значительным задержкам ВС в воздухе в районах с высокой
интенсивностью полетов,
• увеличение эксплуатационных расходов
• рост вероятности опасных сближений.
40.
Специалисты в области УВД прогнозировали, что к 1990— 1995 гг. числостолкновений ВС в воздухе может достигнуть нескольких десятков в год.
Ускорение
создания
и
автоматизированных систем УВД.
внедрения
Стали поступать на оснащение центров УВД с 1964 г.
В РФ работы по автоматизации процессов УВД были начаты в середине 60-х
годов. Развитие средств радиолокационного контроля, наземной и воздушной
связи и оснащение ими 'воздушных трасс, аэропортов и органов УВД позволило в
1967— 1970 гг. перейти на УВД по принципу «вижу — слышу — управляю».
Рост интенсивности полетов по трассам определил необходимость создания
специальных координирующих органов, планирующих воздушное движение с
учетом пропускной способности секторов УВД и аэропортов.
41.
Системы управления воздушным движением на основе технологии радиовещательногоавтоматического зависимого наблюдения (АЗН2В) и средств спутниковой навигации.
42.
Третий этап развития системы УВД (1970—2000 гг.) характеризуется внедрениемавтоматизированных систем УВД и более совершенных ВС третьего и четвертого
поколений.
Необходимо улучшение координации гражданских и военных
органов планирования и управления воздушным движением.
Данная задача была решена путем создания в 1974—1981 гг. в стране
совмещенной Единой системы (ЕС) УВД.
С середины 70-х годов началось внедрение автоматизированных систем УВД.
Первая отечественная система «Старт» внедрена в аэропорту Пулково, а затем в
аэропортах Сочи, Ростова, Краснодара, Волгограда и др. Благодаря ей значительно
расширились оперативные возможности диспетчеров, повысилась пропускная
способность районов аэродромов.
На замену системы «Старт» разработана и внедрена в 1989 г. в аэропорту Пулково
АС «Спектр», обладающая повышенным уровнем автоматизации.
В 1980—1981 гг. введен в действие комплекс автоматизированных систем УВД
«Теркас». Для районов УВД со средней интенсивностью воздушного движения в
1988 г. введена в действие Симферопольская районная автоматизированная
система «Трасса».
В 1990 г. передана в эксплуатацию отечественная районная автоматизированная
система «Стрела», которая по своим возможностям превосходит систему
«Теркас».
43.
IBM-совместимая система хранения и вывода данных, производства шведской компанииDatasaab (80-е годы ХХ века)
44.
Пульт Аэродромного диспетчерского центра (TERCAS). «Теркас» одна из первых во всем СССРавтоматизированных систем
45.
единая информационная система московскогоавиационного узла.
46.
История развития АС УВДРаботы в этом направлении, интенсивно проводившиеся в 60-е годы прошлого века,
привели к созданию в США одной из наиболее совершенных АС УВД первого
поколения, получившей название ARTS (AirportRadarTerminalSystem). Она была
предназначена для установки в аэропортах с интенсивным воздушным движением и
выпускалась в нескольких модификациях. Впервые прототип системы ARTS был
испытан в аэропорту г. Атланты в 1965 г.
Наибольшее распространение в США в то время получил вариант системы ARTS-3,
разработанный фирмой Sperry Rand Univac Division и впервые испытанный в 1971 г. в
аэропорту О'Нага. Модификация ARTS-2 разрабатывалась фирмой Lockheed
Electronics Co, Inc и была предназначена для аэропортов со средней интенсивностью
движения.
В состав системы входили две довольно мощные (для того времени) ЦВМ типа
UNIVAC 1219-B. Было разработано шесть вариантов системы, соответствующих
различным степеням (категориям) автоматизации. Они предназначались для работы
в качестве аэродромных и аэроузловых при различной интенсивности ВД, в связи с
чем акроним ARTS получил более универсальную расшифровку: Automated Radar
Terminal System. К 1980 г. общее число аэропортов США, оснащенных этими
системами, достигло 200.
47.
В Великобритании в 1972 г. была введена в эксплуатацию ACMediator с тремяЦВМ типа Miriad-1 фирмы Marconi. В аэропорту г. Монреаля (Канада), «столице»
ICAO, в 1975 г. была создана объединенная аэродромно-трассовая система JETS, и
примерно в то же время появились АС УВД во Франции, Швеции и других
странах.
Первая отечественная аэродромная система «Старт» полностью была введена в
эксплуатацию в аэропорту Пулково (Ленинград) в 1975 г. и впоследствии
установлена в АП Сочи, Краснодара, Волгограда и др.
В 1980-1981 гг. был введен в строй комплекс АС УВД «Теркас» (шведского
производства), а в Симферополе установлена районная система «Трасса». С 1990 г.
проводились пусконаладочные работы и испытания АСУВД «Спектр» в аэропорту
Пулково, которая должна была заменить морально и физически устаревший
«Старт»; другая районная АС УВД типа «Стрела» была передана в эксплуатацию в
1992 г. в аэропорту Ростова.
АС УВД, которые выпускались в СССР, по своим тактико-техническим
характеристикам уступали зарубежным аналогам. Это отставание вызывалось
рядом причин, среди которых были недостаток вычислительных ресурсов и
устаревшая элементная база, низкая культура и затратный принцип производства,
отсутствие экономических стимулов и слабая восприимчивость к новым идеям,
недостатки планового метода управления и распределения ресурсов и др.
48.
Стрела49.
«Уже в настоящее время существует принципиальная возможность построенияполностью автоматической системы УВД, работающей без участия человекаоператора, <.. > роль диспетчера в такой системе сводится только к контролю
исправности системы. Вмешательство в ее работу необходимо лишь при
возникновении ситуаций, не предусмотренных программой обработки
информации».
В. М. Кейн «Радиотехнические средства управления воздушным движением» 1975 г.
Однако при реализации такой полностью автоматической системы возникнут
серьезные трудности как технического, так и технологического, психологического,
юридического и иного порядка.
В настоящее время область обеспечения воздушного движения принадлежит к тем
немногим отраслям народного хозяйства Российской Федерации, которые в
условиях перехода к рыночной экономике и структурных преобразований
переживают период радикального и интенсивного технического обновления на
основе новых информационных технологий.
50.
Несмотря на существенное снижение объема внутренних воздушных перевозок,интенсивность воздушного движения в ряде регионов даже выросла.
• Первая причина - большая открытость и, как следствие, в увеличении
количества трансконтинентальных трасс и объема международных перевозок.
• Вторая - международный характер воздушного движения и интеграция РФ в
мировую систему воздушного транспорта требуют повышения уровня
аэронавигационного обслуживания и безопасности полетов, приведения их в
соответствие с международными требованиями ИКАО и Евроконтроля и новой
стратегией CNS/ATM.
Необходима модернизация и коренное обновление морально и физически
устаревших технических средств аэронавигации и управления воздушным
движением.
? Документы ИКАО ?
51.
Создание нового поколения автоматизированных систем управлениявоздушным движением (АС УВД) и комплексов средств автоматизации
обработки информации (КСА) стало возможным благодаря разработке новых
информационных технологий на базе современных программных и аппаратных
компьютерных средств. Научную базу разработок составляют методы теории
управления, наблюдения и обработки информации.
Возможности современных компьютерных систем позволяют реализовать
алгоритмы и программы как приложения фундаментальных математических
теорий, которые еще недавно были недоступны для использования в АС УВД и
по этой причине (как полагали разработчики информационных систем)
причислялись к категории абстрактных. Это относится в первую очередь к
двум ветвям математической теории управления-наблюдения в условиях
неопределенности:
к
теории
дифференциальных
игр
и
теории
последовательных статистических правил принятия решений.
Реализованные в ранее разработанных АС УВД алгоритмы первичной и
вторичной
обработки
радиолокационной
информации
основаны
наспектрально-корреляционных методах фильтрации и оценивания (в
частности, использующих критерий Неймана-Пирсона).
52.
Методологическую основу создания современных систем УВД составляют новыеинформационные технологии. Их реализация базируется на широком использовании
стандартных аппаратных и программных средств современных вычислительных
систем, включающих серверы, видеомониторы, адаптеры, модемы и другое
оборудование. Совокупность приемов и методов физической реализации таких систем
и составляет информационное конструирование.
Для повышения эффективности разработки и эксплуатации таких наукоемких изделий,
как системы УВД, в последние годы применяются информационные технологии:
• PDM (ProductDataManagement) — повысить эффективность управления при
создании изделия
• CALS (ContinuousAcquisitionandLife-cycleSupport) — обеспечить эффективность не
только разработки изделия, но и эксплуатации на всем протяжении его жизненного
цикла.
CALS (Continuous Acquisition and Lifecycle
Support
—
непрерывная
информационная
поддержка поставок и жизненного цикла)
означает совокупность принципов и технологий
информационной поддержки жизненного цикла
продукции на всех его стадиях.
Русскоязычный аналог понятия CALS —
Информационная Поддержка жизненного цикла
Изделий (ИПИ).
PDM-система (англ. Product Data
Management — система управления
данными об изделии) — организационнотехническая система, обеспечивающая
управление всей информацией об изделии.
При этом в качестве изделий могут
рассматриваться различные сложные
технические объекты.
53.
ПРОЦЕССЫ ОРГАНИЗАЦИИ ВОЗДУШНОГО ДВИЖЕНИЯКлассификация процессов организации воздушного движения.
Организация воздушного движения
включает в себя комплекс мероприятий,
направленных на обеспечение безопасных и эффективных полетов ВС и
предусматривающих выполнение функций по организации воздушного пространства,
организации потоков воздушного движения и обслуживанию воздушного движения
(ОВД).
Организация ВП представляет собой процесс обеспечения эффективного и безопасного
совместного ИВП всеми пользователями. Его основная задача – получение наиболее полной
пропускной способности ВП, которая решается путем гибкого использования отдельных частей
ВП всеми пользователями с учетом фактических потребностей в данное время..
Пропускной способностью элемента ВП называется максимально допустимая интенсивность
ВД в данном элементе ВП, где, в свою очередь, интенсивность ВД – число ВС, проходящих через
определенные сечения ВП в единицу времени. Под определенным сечением ВП обычно
понимают границы зон ответственности тех или иных органов УВД, а максимально допускаемая
интенсивность ВД определяется требованиями безопасности полетов
Организация (планирование) потоков ВД – это процесс формирования оптимального потока ВС
через элементы ВП в период, когда потоки ВС приближаются к значению пропускной
способности отдельных элементов ВП, аэроузлов и (или) системы УВД, действующей в данном
регионе. Процессы организации ВП и организации потоков ВД в совокупности составляют
процесс планирования использования ВП.
54.
Обслуживание ВД может быть диспетчерским, полетно-информационным,консультативным и аварийным.
Диспетчерское обслуживание, называемое также управлением воздушным
движением (УВД), является основным процессом организации ВД в РФ. Его
задача – предотвращение столкновений ВС между собой в воздухе, и на земле, с
наземными препятствиями, включая транспортные средства аэродрома.
Под полетно-информационным обслуживанием ВД следует понимать
предоставление консультаций и информации, необходимой для обеспечения
безопасного и эффективного выполнения полетов. Оно осуществляется при всех
видах ВД.
Консультативное обслуживание имеет своей основной целью обеспечение
оптимального эшелонирования ВС, выполняющих полеты по правилам
визуальных полетов.
Аварийное обслуживание – это вид ОВД, при котором соответствующие
организации получают, возможно более полную информацию о ВС, нуждающемся
в помощи.
55.
Модель взаимосвязи эффективности системы ОрВДМодель иллюстрирует, способность диспетчеров УВД адаптироваться к изменениям в динамической
окружающей среде воздушного движения и воздействует на эффективность системы ОрВД в целом. Диспетчеры
УВД должны обладать способностью мобилизации своих возможных профессиональных ресурсов для того,
чтобы управлять в этой системе, не ставя под угрозу ее безопасность или эффективность.
56.
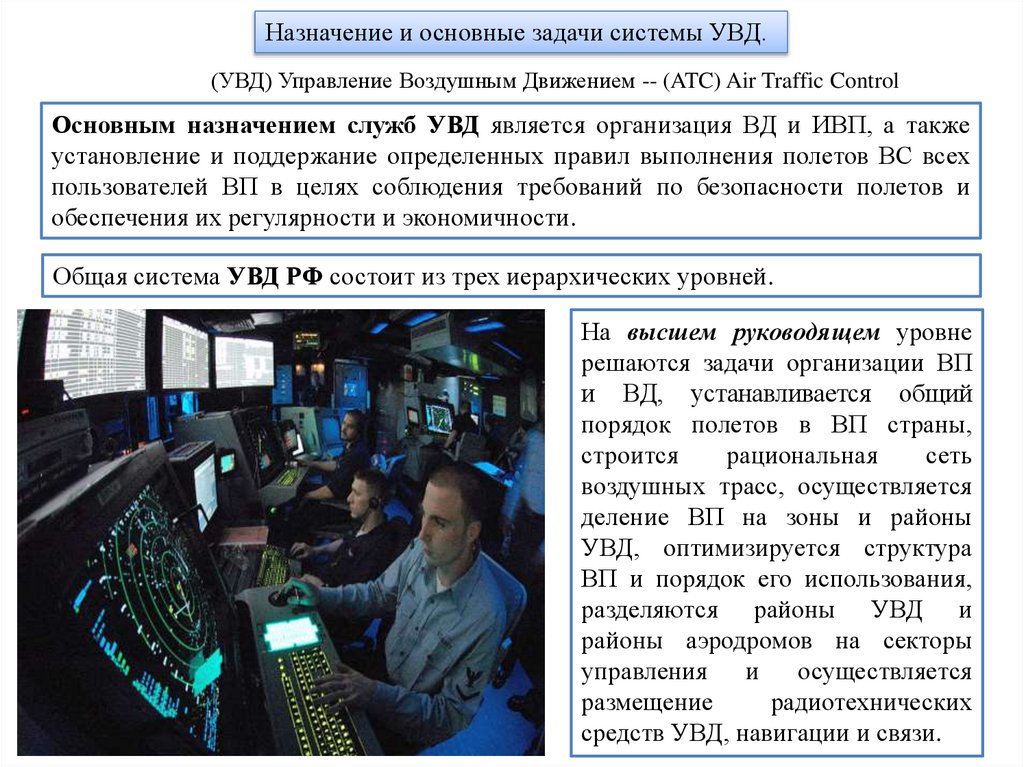
Назначение и основные задачи системы УВД.(УВД) Управление Воздушным Движением -- (ATC) Air Traffic Control
Основным назначением служб УВД является организация ВД и ИВП, а также
установление и поддержание определенных правил выполнения полетов ВС всех
пользователей ВП в целях соблюдения требований по безопасности полетов и
обеспечения их регулярности и экономичности.
Общая система УВД РФ состоит из трех иерархических уровней.
На высшем руководящем уровне
решаются задачи организации ВП
и ВД, устанавливается общий
порядок полетов в ВП страны,
строится
рациональная
сеть
воздушных трасс, осуществляется
деление ВП на зоны и районы
УВД, оптимизируется структура
ВП и порядок его использования,
разделяются районы УВД и
районы аэродромов на секторы
управления и осуществляется
размещение
радиотехнических
средств УВД, навигации и связи.
57.
На среднем уровне системы УВД решаются задачи долгосрочного ипредварительного планирования ИВП и ВД и обеспечивается непосредственное
выполнение этих планов.
См слайд 67-68
Долгосрочное (предварительное) планирование – это составление расписания (зимнего,
летнего) и его коррекция, а также заблаговременное распределение ВП между ведомствами.
При суточном планировании составляют расписание на сутки в определенных частях ВП,
выделенного для использования каждому потребителю с учетом предотвращения
одновременного использования его различными пользователями, допустимой разгрузки
органов УВД, пропускной способности ВП наиболее загруженных зон УВД. Этот план
координируется с планами различных зон УВД и службами обеспечения полетов, а также
контролируют выполнение суточного плана и, в случае возникновения непредвиденных
обстоятельств, составляют новый план на оставшуюся часть суток.
Третий уровень иерархии системы УВД – непосредственное управление ВД –
является наиболее сложным и ответственным, так как именно непосредственное
(оперативное) УВД напрямую связано с обеспечением безопасности полетов.
Основными звеном на третьем уровне являются диспетчеры УВД. Они следят за потоком ВС,
которые должны соблюдать план полета, выдерживать нормы эшелонирования. Диспетчеры
УВД должны обеспечивать такое движение ВС, чтобы исключить опасные сближения ВС в
воздухе, т.е. предотвращать их сближение на расстояние менее установленного по
требованиям безопасность полетов. То же относится к предотвращению опасного сближения
ВС с наземными препятствиями, включая автотранспорт аэродромов.
58.
пПринципы автоматизации процессов УВД.
Три основных показателя:
- безопасность,
- регулярность,
- экономичность полетов,
тесно связаны друг с другом и существенно зависят от эффективности УВД.
Радикальным методом решения возникающих при этом проблем, как было выяснено еще в 50-х
годах ХХ века, является автоматизация сбора, передачи и обработки информации о воздушной
обстановке.
Основной и главной составляющей частью первых автоматизированных систем управления
воздушным движением были средства радиолокационного наблюдения,
Основу создания современных систем УВД составляют новые информационные технологии. Их
реализация базируется на широком использовании стандартных аппаратных и программных
средств современных вычислительных систем, включающих серверы, видеомониторы, адаптеры,
модемы и другое оборудование. Совокупность приемов и методов физической реализации таких
систем и составляет информационное конструирование.
Для повышения эффективности разработки и эксплуатации таких наукоемких изделий, как системы
УВД, в последние годы применяются информационные технологии PDM (Product Data
Management) и CALS (Continuous Acquisition and Life-cycle Support). Если первая из них имеет
целью повысить эффективность управления при создании изделия, то задача второй – обеспечить не
только эффективность разработки изделия, но и эксплуатации на всем протяжении его жизненного
цикла.
59.
Автоматизированные системы управления воздушным движением (АС УВД)от других широко распространенных в технике средств автоматизации
отличались тем, что их целью была передача техническим средствам функции,
а не выполнение отдельных операций.
Первые АС УВД должны были обладать высокой степенью сложности, так как были
призваны исполнять цепочки действий, заменяя, таким образом, действия диспетчера
службы УВД. Эти функции включали различные этапы обработки информации о
воздушной обстановке (ВО) и регулировались в виде некоторых алгоритмов, т.е.
определенных предписаний.
Диспетчер, как правило, выполняет следующие функции:
наблюдение – получение информации о ВО и первичное оценивание данных измерений;
анализ данных – оценка их достоверности, идентификация, классификация и оценка
параметров движения каждого ВС;
обобщение – формирование общей картины ВО;
оценивание – распознавание опасных ситуация: отклонений от плановой траектории,
потенциально конфликтных ситуаций, опасных сближений и т.д.;
выработка решений – рассмотрение возможностей разрешения стандартных и нестандартных
ситуаций;
передача команд на ВС, контроль правильности их получения и исполнения.
60.
особенности этого процесса:функции и входящие в них операции всегда выполняются последовательно во времени;
общая последовательность действий носит циклический характер, т.е. перечисленные
выше действия периодически повторяются;
все технологические операции выполняются в реальном масштабе времени (это очень
важный момент).
С ростом интенсивности и плотности ВД загрузка диспетчера УВД возрастает
настолько, что существенно повышается вероятность принятия им ошибочного
решения или пропуска опасных ситуаций. Возникает необходимость передачи
части функций диспетчера УВД вычислительной системе.
плотность ВД ???
АС УВД могут вырабатывать соответствующие решения для конкретной ВО в
типовых (стандартных) ситуациях, но они не в состоянии принимать решения в
нестандартных ситуациях, предусмотреть разнообразие которых заранее
невозможно. По этой причине не рассматривается и не ставится вопрос о
создании полностью автоматических систем УВД. Речь может идти только о
создании автоматизированных систем, в которых участие человека является
необходимым и обязательным.
61.
Плотность ВД характеризуется общим числом ВС, одновременно находящихся вединице объема (площади) ВП, контролируемого органом УВД.
62.
Системы УВД строятся как автоматизированные, вычислительным средствампередается лишь определенная часть функций и операций обработки информации
по жестким алгоритмам,
Зв человеком-оператором остаются те задачи, которые требуют творческого
подхода и принятия нестандартных решений в сложных ситуациях.
По мере совершенствования АС УВД перечень функций и операций, которые
полностью автоматизированы, будет расширяться и, следовательно, будет
расширяться общий уровень автоматизации АС УВД
Автоматизация функций УВД является главным фактором повышения
безопасности полетов, увеличения пропускной способности и эффективности
систем УВД на всех фазах полета ВС. При этом улучшаются условия работы для
диспетчерского и инженерного персонала, повышается производительность их
труда.
Важнейшей задачей автоматизации процессов УВД является снижение риска
диспетчерских ошибок.
Автоматизация обеспечивает обработку, хранение и обмен все большими объемами
информации, с постоянно возрастающей скоростью функционирования при
повышении уровня достоверности и точности получаемой информации.
63.
Эксплуатационные задачи, стоящие перед автоматизацией в целях увеличенияпропускной способности и безопасности УВД при улучшении условий труда
диспетчеров, заключаются в следующем:
1. Улучшение процессов наблюдения, включая сбор, обработку и хранение
информации от различных источников, а именно:
обзорных радиолокационных систем (РЛС), посадочных РЛС, вторичных радиолокаторов
(ВРЛ), автоматических радиопеленгаторов (АРП);
систем автоматического зависимого наблюдения (АЗН);
планов полетов;
метеорологических данных;
2. Развитие цифровой связи для обмена сообщениями между органами УВД и для
обеспечения диалога между экипажем ВС и диспетчером УВД по специальной
линии цифровой связи;
3. Реализация и развитие функций предотвращения столкновений:
между ВС в полете;
между ВС на земле;
между ВС и землей;
4. Совершенствование интерфейса человек-машина за счет использования
современных средств диалога (экран с высоким разрешением, многооконный
интерфейс и т.д.);
64.
5. Развертывание средств наблюдения и помощи в принятии решений:прогнозирование траекторий полета;
обнаружение конфликтных ситуаций;
разрешение конфликтов;
автоматическое обнаружение отклонений от заданной траектории;
6. Развитие элементов искусственного интеллекта;
7. Корреляция между бесконфликтными траекториями и данными наблюдений
(текущими и экстраполированными).
65.
66.
67.
68.
69.
70.
71.
72.
73.
74.
75.
76.
77.
78.
Общие требования к технической реализации АС УВД.Аппаратные и программные средства АС УВД, с помощью которых обеспечивается
поддержка функций автоматизированной обработки информации, должны
удовлетворять ряду требований
Основные характеристики АС УВД, которые непосредственно влияют на уровень
безопасности полетов:
• Готовность;
• Целостность;
• Непрерывность;
• Эргономичность;
• Надежность;
• Открытость;
• Эксплуатационные требования.
Готовность – это свойство системы выполнять заданные функции по соответствующей
инициации (т.е. по требованиям). Количественной мерой готовности системы является
отношение фактического времени (длительности) функционирования системы от подачи
сигнала инициации (поступления требования) до завершения предписанных операций к
запланированному времени (интервалу) функционирования системы для выполнения
указанных операций. С понятием готовности связано такое понятие, как полнодоступность,
заключающаяся в отсутствии задержки инициации системы или в отсутствии
интервала времени, обусловленного, например, «занятостью» системы.
79.
Целостность заключается в свойстве системы обнаруживать и исправлятьсобственные ошибки двух видов:
• Ошибочное действие (сообщение) расценивается как правильное
(«Пропуск ошибки» или «ложная тревога» – т.е. с точки зрения
математической статистики, это равносильно появлению ошибки первого
рода);
• Правильное действие (сообщение) классифицируется как ошибочное
(«пропуск сигнала», т.е. с точки зрения математической статистики, это
равносильно появлению ошибки второго рода).
В качестве количественной меры целостности принимают соответствующие
вероятности появления ошибок или их комбинации. С содержательной точки зрения
целостность отражает степень доверия к действиям системы и к получаемым
результатам.
Непрерывность является свойством системы выполнять в реальном масштабе
времени свои функции без незапланированных прерываний в течение заранее
запланированного периода работы.
За количественную меру непрерывности принимают вероятность отсутствия
прерываний за заданное время работы. Численно ее можно оценивать как
отношение суммарного времени прерываний к общему (заданному) времени
функционирования.
80.
Эргономичность – свойство системы, состоящее в доступности и удобстве работыс ней человека-оператора, включая управление, контроль и предоставление
необходимой информации, называется.
Надежность – это свойство системы выполнять все свои функции, адекватно
реагируя как на заранее определенные воздействия, так и на их отсутствие.
Нарушение этого свойства расценивается как отказ, т.е. невыполнение системой
своих функциональных предназначений. Степень надежности оценивается либо
вероятностью отказа, либо временем наработки до отказа.
Открытость – свойство информационной системы, состоящее в наличии
возможности замены программных и аппаратных средств или внесения в них
ограниченных изменений. Степень открытости определяется пределами этих
ограничений
и
обусловлена
соответствующими
конструктивными
и
технологическими мерами.
К эксплуатационным требованиям относятся типовые требования, которые
предъявляются к любой системе в процессе ее технической эксплуатации
(контролепригодность, ремонтопригодность, сохраняемость и т.д.).
81.
АВТОМАТИЗАЦИЯ ОБРАБОТКИ ПЛАНОВОЙ ИНФОРМАЦИИ.Организация системы планирования полетов в РФ.
Существует предварительное, суточное и текущее планирование полетов.
На этапе предварительного планирования производится сглаживание пиков
интенсивности движения на аэродромах вылета и посадки, трассах и их
пересечениях путем изменения планового времени вылета и маршрутов полета,
изучается спрос авиакомпаний на определенные направления (маршруты),
проектируются новые трассы, использование которых позволит снизить
расходы авиакомпаний и повысить безопасность полетов.
На этапе суточного планирования решаются следующие задачи:
оптимальное распределение ИВП с учетом интересов всех пользователей, подавших заявки;
проверка лицензий авиакомпаний на право выполнения заявленных полетов;
проверка задолженности авиакомпаний за предоставленное аэронавигационное
обслуживание;
проверка запланированного маршрута на попадание в зоны ограничений и режимов;
сглаживание пиков интенсивности ВД в тех или иных регионах в соответствии с
поданными заявками.
82.
На основе утвержденных Зональными центрами (ЗЦ) УВД суточных плановсоздаются суточные планы аэропортов, которые регламентируют работу служб
аэропорта в день полета.
С наступлением новых суток суточный план переходит в текущий. С этого
момента времени информация о состоянии конкретного рейса уточняется на каждом
этапе полета.
Для каждого рейса выдается флайт-план, содержащий время вылета и маршрут
полета. Эта информация передается в центры УВД по маршруту полета и в органы,
осуществляющие контроль ВП. Фактический маршрут полета должен
соответствовать заявленному в плане (исключения составляют чрезвычайные
ситуации). За соблюдение маршрута несут ответственность экипаж ВС и
диспетчер УВД, контролирующий выполнение полета.
Информация о принятии решения на вылет, запуске двигателей, начале руления,
маршруте выхода из района аэродрома каждого рейса отображается в формуляре
ожидания системы УВД. После взлета и ввода в сопровождение ведется постоянное
сравнение планового и фактического маршрутов, причем по мере прохождения
контрольных точек маршрута последующие плановые времена корректируются и
данные передаются в центр УВД по маршруту полета. Это позволяет с достаточной
точностью формировать списки ожидания.
83.
В соответствии с ФП ИВП (Постановление правительства Российской Федерации№138 от 11.03.2010 г. (ред. от 12.07.2016) «Об утверждении Федеральных правил
использования воздушного пространства Российской Федерации.
IV. Разрешительный и уведомительный порядок использования
воздушного пространства»)
планирование использования воздушного пространства осуществляется:
• главным центром ЕС ОрВД – в воздушном пространстве классов А и С на
основании планов (расписаний, графиков) использования воздушного пространства,
по которым Главный центр выдает разрешение на ИВП;
• зональным центром ЕС ОрВД – в воздушном пространстве классов А и С, а
также в воздушном пространстве класса G в отношении полетов беспилотных
летательных аппаратов своей зоны на основании планов (расписаний, графиков)
использования воздушного пространства, по которым зональный центр выдает
разрешение на ИВП;
• районным центром ЕС ОрВД – в воздушном пространстве классов А и С, а
также в воздушном пространстве класса G в отношении полетов беспилотных
летательных аппаратов и деятельности, не связанной с полетами воздушных судов
своего района, на основании планов (расписаний, графиков) использования
воздушного пространства, по которым районный центр выдает разрешение на ИВП.
84.
Стратегическое планирование использования воздушного пространстваосуществляется за 2 и более суток до дня использования воздушного
пространства с целью согласования вопросов, связанных с организацией
использования воздушного пространства и его обеспечением.
Предтактическое планирование использования воздушного пространства
осуществляется накануне дня использования воздушного пространства с целью
распределения воздушного пространства по месту, времени и высоте.
Тактическое
планирование
использования
воздушного
пространства
осуществляется в процессе выполнения суточного плана путем перераспределения
воздушного пространства по времени, месту и высоте с целью обеспечения
безопасности спланированной деятельности и деятельности, планы которой
поступают в текущие сутки.
85.
86.
Координирование использования воздушного пространства осуществляется в целяхобеспечения заявленной пользователями воздушного пространства деятельности в
зависимости
от
складывающейся
воздушной,
метеорологической,
аэронавигационной обстановки и в соответствии с государственными приоритетами
в использовании воздушного пространства.
В процессе планирования и координирования использования воздушного
пространства центры ЕС ОрВД могут вносить изменения в заявленные
пользователями воздушного пространства условия ИВП по месту, времени и высоте.
Указанные изменения должны быть доведены до лица, представляющего план ИВП,
и органов ПВО.
Формы представления плана полета
План полета воздушного судна представляется в одной из следующих форм:
• сообщение экипажа с борта воздушного судна, содержащее информацию о представленном
плане или изменениях в текущий план;
• сообщение по авиационной наземной сети передачи данных и телеграфных сообщений,
содержащее информацию о представленном плане или повторяющемся плане;
• сообщение с использованием телефонной сети связи общего пользования или сети Интернет,
содержащее информацию о представленном плане или повторяющемся плане;
• сообщение на бумажном носителе, включая факсимильное сообщение, содержащее
информацию о представленном плане или повторяющемся плане.
87.
88.
План полета воздушного судна представляется пользователем воздушногопространства или его представителем в органы обслуживания воздушного движения
(управления полетами) в соответствии с Табелем сообщений о движении воздушных
судов в Российской Федерации.
План полета воздушного судна представляется для получения разрешения на
использование воздушного пространства классов А и С, а также в целях
уведомления органов обслуживания воздушного движения (управления полетами)
для получения полетно-информационного обслуживания при использовании
воздушного пространства класса G.
Сообщение экипажа с борта воздушного судна о плане полета воздушного судна при
использовании воздушного пространства класса G передается по усмотрению
пользователя, а при намерении использования воздушного пространства классов А и
С – не менее чем за 30 минут до входа в воздушное пространство классов А и С.
В районах с высокой плотностью воздушного движения орган обслуживания
воздушного движения (управления полетами) доводит до экипажа воздушного судна
условия или ограничения в отношении плана полета воздушного судна,
представляемого с его борта.
89.
Сообщения о плане полета воздушного судна передаются по авиационной наземнойсети передачи данных и телеграфных сообщений, с использованием сети Интернет,
на бумажном носителе, включая факсимильное сообщение.
Сообщение о представленном плане полета воздушного судна передается не более
чем за 5 суток и не менее чем за 1 час до расчетного времени отправления.
Сообщение о повторяющемся плане полета воздушного судна передается не менее
чем за 14 суток (в предыдущей редакции ФП ИВП – 15 суток), а изменения,
вносимые в этот план, представляются не менее чем за 7 суток.
Подача плана полета осуществляется пользователем по сети АФТН с рабочих мест
ЦУП авиакомпаний, через пункты обеспечения планирования центров ОВД или
пункты аэронавигационного обеспечения полетов типа «брифинг».
90.
ДЗИКАО «Руководство по совместной организации потоков воздушного
движения» Doc 9971 – 2014
91.
92.
93.
94.
95.
96.
97.
98.
Задачи автоматизации процессов планирования ВД.Автоматизация функций планирования осуществляется на основе рекомендаций
ИКАО, изложенных в Европейском аэронавигационном плане.
Для этих целей решаются следующие задачи:
• планирование и координирование ИВП РФ и сопредельных государств;
• устранение перегрузок зон и секторов УВД путем рационального планировании
и упорядочения потоков ВС;
• выбор наиболее экономичных маршрутов и профилей полетов с учетом
интересов всех пользователей ВП;
• осуществление процессов планирования ВД и расчета аэронавигационных
сборов с использованием современных средств связи;
• обмен планами полетов и аэронавигационной информацией между элементами
системы планирования ВД РФ, сопредельных государств и органами
планирования Европейского региона ИКАО;
• создание в перспективе единой центральной системы сбора данных об
аэронавигационном обслуживании, расчета и учета аэронавигационных сборов.
99.
Информационная структура системы планирования.Плановая информация должна автоматически обрабатываться и представляться в удобной
форме в виде плановых таблиц, формуляров, списков ожидания, она включает базовые
(информационные), плановые, корректировочные данные, метеоинформацию и вспомогательную
информацию.
Базовая информация содержит справочные данные по аэропортам, контрольным точкам
маршрутов, трассам, авиакомпаниям, по структуре ВП. Плановая информация состоит из
повторяющихся планов полетов, предварительных планов полетов (ППЛ) и др.
Корректировочная информация – это информация о фактическом движении ВС (взлет,
фактический пролет контрольных точек, уточненное плановое время пролета контрольных точек по
маршруту), уточненный маршрут полета. К этому виду информации также относят согласование
между смежными РЦ, информацию относительно ограничений ИВП.
Метеоинформация – это прогнозы погоды на аэродромах и на трассах, фактическая погода на
маршрутах полета.
Вспомогательная информация – сообщения NOTAM, т.е. извещения, содержащие
информацию о введении в действие, состояние или изменение любого аэронавигационного
оборудования, обсуждение правил или информация об опасности, своевременное предупреждение
о которых имеет важное значение для персонала, связанного с выполнением полетов
100.
Взаимодействие с источниками и потребителями информации осуществляется посети АФТН (авиационная фиксированная сеть электросвязи), по глобальным,
региональным или местным линиям связи.
Особое внимание при автоматизации обработки плановой информации
уделяется следующим вопросам:
• прием, обработка и выдача на рабочие места пользователей плановой и
метеоинформации, информации об ограничениях и режимах ИВП, а также
справочной и другой информации;
• вид отображаемой информации на рабочих местах пользователей;
• обеспечение взаимодействия с источниками и внешними потребителями
информации;
• документирование и воспроизведение различных видов информации.
При этом источниками информации для планирования являются:
• ЗЦ ЕС ОрВД;
• аэродромно-диспетчерское пункты (АДП) аэропортов;
• АС УВД;
• службы планирования авиакомпаний;
• служба аэронавигационной информации;
• метеокомплексы.
101.
ДЗФЕДЕРАЛЬНАЯ СЛУЖБА ВОЗДУШНОГО ТРАНСПОРТА РОССИИ
ПРИКАЗ от 15 июля 1999 г. N 14
ОБ УТВЕРЖДЕНИИ И ВВЕДЕНИИ В ДЕЙСТВИЕ "РУКОВОДСТВА ПО АВИАЦИОННОЙ ЭЛЕКТРОСВЯЗИ"
В целях совершенствования нормативной правовой базы технической эксплуатации систем и видов авиационной
электросвязи и повышения эффективности их использования приказываю:
1. Утвердить "Руководство по авиационной электросвязи" и ввести в действие с 01.09.99 в соответствии с
действующим законодательством.
2. Признать утратившим силу с 01.09.99 "Наставление по связи гражданской авиации СССР (НС ГА-80)" со
всеми изменениями и дополнениями (Приложение).
3. Руководителям территориальных органов Федеральной службы воздушного транспорта России довести
настоящий Приказ до предприятий и организаций гражданской авиации региона.
Директор
В.И.АНДРЕЕВ
Приложение к Приказу ФСВТ России от 15 июля 1999 г. N 14
ПЕРЕЧЕНЬ УТРАТИВШИХ СИЛУ НОРМАТИВНЫХ ПРАВОВЫХ АКТОВ
1. Приказ МГА СССР от 4 июня 1980 г. N 88 "Об утверждении и введении в действие Наставления по связи
гражданской авиации СССР (НС ГА-80)".
2. Приказ МГА СССР от 2 июля 1984 г. N 143 "О внесении изменений и дополнений в НС ГА-80".
3. Указание МГА СССР от 29 ноября 1988 г. N 722/У "О внесении изменений и дополнений в НС ГА-80".
4. Совместное указание ДВТ Минтранса России и Росаэронавигации Минтранса России от 24 июля 1995 г. N ДВ90/И/РАН 15.3-1174 "О внесении изменений и дополнений в НС ГА 80".
Начальник УРРиТЭ ОВД
Б.В.МИХАЙЛОВ
102.
Сеть авиационной фиксированной электросвязи (АФТН)(англ. aeronautical fixed telecommunication network, AFTN) — информационная
сеть гражданской авиации.
Входит в комплекс управления воздушным движением и используется
авиапредприятиями (аэропортами, авиакомпаниями, агентствами воздушных
сообщений, метеорологическими службами и др.) и органами управления
гражданской авиацией для приёма и передачи аэронавигационной и
метеорологической информации, планов полётов, оперативной информации о
движении ВС и прочей производственной информации. Организована как
телеграфная сеть с центрами коммутации сообщений и абонентами сети на
основе выделенных телеграфных каналов.
В сети авиационной фиксированной электросвязи обрабатываются следующие
категории сообщений:
сообщения о бедствии;
срочные сообщения;
сообщения, касающиеся безопасности полётов;
метеорологические сообщения;
сообщения, касающиеся регулярности полётов;
сообщения службы аэронавигационной информации (САИ);
авиационные административные сообщения;
служебные сообщения.
103.
ГЛОБАЛЬНЫЙ АЭРОНАВИГАЦИОННЫЙ ПЛАНDoc 9750-AN/963 Четвертое издание – 2013 год
Указанные выше задачи определяют информационную структуру АС. Система
планирования представляет собой информационно-вычислительную систему
(ИВС) сетевой конфигурации. В процессе ее функционирования различные
источники информации взаимодействуют между собой и системой обработки
плановой информации, обеспечивающей оперативную обработку и выдачу
результатов потребителям.
Информационную структуру такой АС целесообразно представить в виде
соединения отдельных функциональных модулей. Согласно такой структуре и
выполняется техническая реализация АС обработки плановой информации.
104.
1. Модуль сопряжения с источниками информации. Задача модуля заключается вобработке и в представлении в определенном виде всей поступающей информации.
2. Модуль обработки и хранения информации. Выполняется архивирование, функции
администрирования и резервирования. Производится ежедневное резервирование
данных и, кроме того, текстовое резервирование данных в зависимости от настроек.
Обеспечивается поддержка целостности и восстановления данных при аппаратных
и программных сбоях, защита данных от разрушений при авариях и сбоях в
электропитании комплекса.
3. Модуль планирования полетов на аэродроме. Создает текущий план на основе
повторяющихся планов и заявок. Обеспечивает расчет плановой траектории в
районе аэродрома.
4. Модуль планирования полетов на трассах. Обеспечивает расчет плановой
траектории. При изменении параметров полета (времени вылета, маршрута)
плановая траектория автоматически пересчитывается.
5. Модуль статистической обработки. Обрабатывает выполненный план полета,
позволяет сделать распечатки статистических выборок, различных выходных форм.
6. Модуль сопряжения с потребителями информации. Обеспечивает взаимодействие с
потребителями информации, в частности, в отношении выполнения
аэронавигационного обслуживания и его оплаты.
105.
Информационная система «Аэропорт»ИС «Аэропорт» — это комплексное решение, призванное обеспечить поддержку
производственных, технологических и финансовых процессов авиационного предприятия.
Оно позволяет решать задачи, связанные с организацией, подготовкой и выполнением работ
по обеспечению авиационных перевозок в аэропорту.
Развитие системы осуществляется с учетом требований российских и международных
(ICAO, IATA) нормативных документов, рекомендаций и правил, регламентирующих
деятельность аэропортов в области наземного обслуживания воздушных судов, пассажиров
и организации воздушного движения.
В состав комплекса входят следующие программные и функциональные модули:
Расписание рейсов;
Суточный план обслуживания;
Суточный план обслуживания - «cигнальное табло»;
Планирование персонала и ресурсов;
Учет доходов, формирование актов формы С;
Интеграция с 1С;
Мобильные устройства для удаленной работы;
Графическая панель «Карта полетов»;
Графическая панель «План стоянок»;
График движения воздушных судов;
График загрузки аэропорта (по персоналу и ресурсам);
Представление в виде стыковок рейсов;
Электронный диктор;
Информационное табло (FIDS) для информирования сотрудников и пассажиров;
Веб-приложение;
Система отчетности и бизнес-аналитики (OLAP).
106.
Суточный план полетовМодуль «Суточный план обслуживания» — это мощный инструмент
предназначенный для отслеживания движения воздушных судов и обеспечения служб
авиапредприятия оперативной информацией по выполняемым рейсам. В Суточном
Плане учитывается и отражается информация о планируемых и уже выполненных
рейсах, сведения по экипажам, воздушным судам, загрузке, задержках, отменах и т.д.
В дальнейшем происходит корректировка суточного плана на основании полученных
телеграмм по каналам АФТН, SITA или путем ручного ввода информации.
Карточка рейса;
Информация по пассажирам, грузу и топливу;
Статусы состояния (подготовка, полет, выполнение);
Настраиваемая система представлений;
Обработчик телеграмм (каналы АФТН, СИТА и e-mail);
Система оповещения изменений суточного плана;
Визуализация состояния по аэропортам движения (задержки, нотамы и т.д.).
107.
Суточный план полетов108.
Карта полетовГрафическая панель «Карта полетов» — еще один удобный
инструмент, позволяющий отслеживать выполнение
производственной программы. С помощью данного
представления суточного плана обслуживания можно
быстро оценить текущую ситуацию и своевременно на нее
среагировать.
Визуализация плана полетов Воздушных судов;
Различные масштабируемые представления плана;
Визуализация рейсов, находящихся под контролем;
Предупреждение о задержках рейсов с визуализацией;
Информация о рейсе (экипаж, загрузка т.д.);
Эстафета в аэропортах (экипажи, планы полетов).
109.
Карта полетов110.
КОМПЛЕКС СРЕДСТВ АВТОМАТИЗАЦИИ ПЛАНИРОВАНИЯ ВОЗДУШНОГОДВИЖЕНИЯ.
Назначение и состав системы планирования.
Система обработки плановой информации представляет подсистему в общем
комплексе АС УВД и называется «Комплекс средств автоматизации планирования
воздушного движения (КСА ПВД)». Рассмотрим современный КСА ПВД «Планета»,
нашедший широкое применение в ГА РФ.
Комплекс «Планета» выполняет функции по сбору и преобразованию данных о
плановой информации, осуществляет обработку сообщений сети АФТН и
распределение планов полетов. Обработка планов полета включает
представление каждого полученного сообщения в стандартном формате, выдачу
диспетчеру сообщения о выявленных ошибках, идентификацию каждого
сообщения в соответствии с классификацией, принятой в ГА, последующий
автоматический или ручной ввод в базу данных, корректировку планов полетов по
информации, полученной от нескольких источников.
111.
КСА ПВД "Планета"КСА ПВД "Планета" предназначен для зональных и укрупненных центров ЕС ОрВД,
центров ОВД, аэродромных и аэропортовых информационных систем. Это
первый российский сертифицированный комплекс автоматизации в области
планирования и обеспечения ИВП и ОВД.
Комплекс «Планета» обеспечивает:
стратегическое, предтактическое и тактическое планирование полетов (также в
масштабах страны/ региона);
обеспечивает плановой и аэронавигационной информацией органы единой
системы организации воздушного движения (ЕС ОрВД), взаимодействующие
автоматизированные системы УВД и ПВД;
взаимодействие с сетями передачи данных (AFTN , AMHS и др.);
расчет плановой траектории полета ВС по всему маршруту от взлета до посадки;
расчет ожидаемой загрузки полетов на аэродроме, в зоне, секторе ОВД или
конкретной точке воздушной трассы;
статистику использования воздушного пространства и составление отчетов.
112.
области применения:• используется в качестве подсистемы планирования в АРАС УВД «Альфа», а
также в качестве основной подсистемы КСА ПИВП;
• применяется для обеспечения плановой информацией в АДЦ, РЦ ЕС ОрВД, ЗЦ
ЕС ОрВД, а также в системах брифинга производственно-диспетчерских и
информационно-справочных служб аэропортов и авиакомпаний.
Состав:
Сервер (возможно совмещение с АРМ);
АРМ диспетчера АДЦ, включая функции обработки НОТАМ;
АРМ диспетчера планирования РЦ;
АРМ
оператора
информационно-справочной
группы
(ИСГ)
или
производственно-диспетчерской службы предприятия (ПДСП);
АРМ экономиста;
АРМ авиационной наземной сети передачи данных и телеграфной связи (АНС
ПД и ТС)
113.
ФУНКЦИОНАЛЬНЫЕ ВОЗМОЖНОСТИКСА ПВД «Планета» обеспечивает выполнение всех процедур и технологических
операций, предусмотренных следующими документами:
Приложение 10 к Конвенции ИКАО «Авиационная электросвязь», том 1 и 2;
Руководство по авиационной электросвязи (РС ГА-99);
Требования к функциональным характеристикам средств коммутации сообщений
телеграфной сети связи ГА (ТСТС ГА-92);
DO С4444-АТМ/501, документ ИКАО, регламентирующий процедуры ОВД;
Табель сообщений о движении воздушных судов в Российской Федерации (ТС-95);
Приказ министра обороны Российской Федерации и министра транспорта
Российской Федерации № 483/168 «Об утверждении инструкции по составлению
формализованных заявок на использование воздушного пространства — планов
полетов воздушных судов, заявок на запуски аэростатов, шаров-зондов, проведение
стрельб, пусков ракет и взрывных работ», от 30 ноября 2001 г.;
Протокол информационного взаимодействия между автоматизированными
системами планирования воздушного движения и автоматизированными
системами управления воздушным движением;
Технологии работы диспетчеров ОрВД.
114.
КСА ПВД «Планета» выполняет следующие основные функции:составление расписания движения (плана полетов) на заданную дату в
определенном аэропорту, зоне УВД (районе, секторе) и т. д.;
предварительное планирование движения воздушного судна (ВС) на основе
действующего расписания и планов полетов (ФПЛ);
суточное планирование полетов;
создание и обработку предварительных и повторяющихся планов полетов;
автоматическое отслеживание состояния плана полетов на текущие сутки на
основании сообщений по сети АНС ПД и ТС (AMHS);
формирование, прием, передачу и хранение телеграфных сообщений по сети АНС
ПД и ТС;
создание выходных форм из плана полетов (выписки) в необходимом объеме;
расчет ожидаемой интенсивности полетов в аэропорту, зоне УВД (районе, секторе)
или конкретной точке воздушной трассы (ВТ);
расчет времени входа ВС в зону управления или пролета заданной точки;
расчет плановой траектории полета ВС по всему маршруту — от взлета до посадки;
поддержку «Протокола информационного взаимодействия между смежными
органами УВД, оснащенными автоматизированными системами (средствами)
управления воздушным движением с функцией обработки планов полетов» (OLDI);
ввод данных структуры воздушного пространства в формате ARINC 424-15;
передачу уточненных плановых данных по маршруту полета ВС (используя канал
АНС ПД и ТС);
115.
согласование условий входа в смежные РЦ по каналу АНС ПД и ТС;автоматизированную подстановку адресов по маршруту полета (при наличии
информации — ЕЕТ/, четырехбуквенных обозначений (индексов) РЦ (ВРЦ с
правом непосредственного УВД) ЕС ОрВД, через районы которых
выполняется полет (в хронологической последовательности), в поле 18 Плана
полета);
отображение метеоинформации (табло КРАМС) на рабочих местах АДП;
выделение рейсов, на которые нет подтверждающей информации на
выполнение полета (РПЛ и ПЛН);
создание архивов планов полетов и телеграфных сообщений за определенный
период
получение справочной информации об аэропортах, авиакомпаниях, воздушных
судах;
предоставление расчетов за обслуживание ВС, составление реестров и
выставление счетов;
КСА ПВД «Планета» имеет многооконный интерфейс, настройка которого
(размеры окон, количество строк и столбцов, размер шрифта, цвет шрифта и
фона и т. п.) производится индивидуально для каждого пользователя.
116.
В зависимости от конфигурации зон УВД и требований заказчика комплекс«Планета» может включать от одного до двух серверов планирования и
неограниченное количество рабочих станций, на которых могут выполняться
задачи планирования, штурманского обеспечения, задачи планово-диспетчерской
службы перевозок и экономики.
Количество рабочих станций ограничено лишь числом мест подключения в
концентраторе локальной вычислительной сети (ЛВС).
На рисунке 1 показана минимальная конфигурация КСА ПВД «Планета» для
аэропорта с РЦ и АДП. В этой конфигурации сервер может использоваться как
рабочее место, в качестве которого может также использоваться автоматизированное
рабочее место (АРМ) АФТН.
Рабочее
место
диспетчера
планировани
я
АФТН
Сервер планирования
РЦ
Концентратор
ЛВС АС УВД
Концентратор ЛВС
КСА ПВД
«Планета»
Сервер планирования
АДП
Состав и связи КСА ПВД «Планета».
АРМ
АФТН
Рабочее место
диспетчера
АДП
117.
Основным источником информации для КСА служит сеть АФТН. Преобразованиеинформации, получаемой по каналу АФТН, осуществляет карта сопряжения с
АФТН. Для подключения к Центру коммутации сообщений (ЦКС) используется
трех- или четырехпроводная линия, включающая прием, передачу и «землю» (в
случае четырехпроводной линии «земля» идет отдельно для приема и для
передачи). Карта АФТН обеспечивает скорость обмена данными с ЦКС от 50 до
2400 бод в коде МТК2. На рисунке 2 показана связь КСА с сетью АФТН.
АРМ АФТН (пользователь)
ЦКС
ТЕЛЕКС АРМ АФТН (контроль)
Концентратор
АРМ АФТН (пользователь)
Примерная схема подключения АРМ АФТН и «Телекс».
118.
Программное и информационное обеспечение.Программная оболочка обеспечивает работу приложений, выполняющих
различные функции в комплексе. Приложения разделяются на обязательные
(работающие постоянно, т.е. пользователь не имеет возможности их закрыть) и
приложения пользователя (эти программы пользователь может запустить, а
также может выйти из них).
Основу системы составляют электронные таблицы (базы данных). Таблицы
данных и связи между ними показаны на рисунке
Авиакомпании
Типы ВС
Виды оплаты
План полетов
Государства
Заказчики
Текущий
план
Архив
планов
Курс валюты
Виды полетов
Таблицы данных и связи между ними
119.
К основным данным относятся таблицы аэропортов, авиакомпаний, типов ВС, точек иучастков воздушных трасс. Это данные используются программами комплекса при
обработке поступающей плановой информации и при передаче информации
потребителю.
К оперативным данным относятся центральное расписание, телеграммы и текущие
планы полетов. При этом центральное расписание или повторяющиеся планы полетов
заводятся в комплекс автоматически по каналам связи, а телеграммы поступают по
каналам АФТН и хранятся в таблице, как принятые, так и переданные. Заявки
(предварительные планы полетов) оформляются в виде таблицы, где данные,
переданные с рабочих мест комплекса, содержат предварительные планы полетов и
изменения к ним, а также вводятся данные от других АДП или служб планирования
авиакомпаний. Из меню таблицы отправляются телеграммы, касающиеся суточного
планирования.
Текущий план полетов отображается в виде трех таблиц – вылета, прилета и транзита. Из
меню имеется возможность отправлять информацию, касающуюся текущего планирования. В
текущем плане полетов собирается вся обработанная информация о фактических вылетах и
посадках ВС, их задержках, изменениях, текущих планов. Источниками этой информации являются:
ручной ввод;
информация с рабочих мест системы УВД;
другие АДП, ЗЦ, РЦ, информация от которых поступает по каналам АФТН.
Используются также таблицы технической годности, куда заносятся данные о времени
открытия и закрытия аэропортов. Эта информация используется в текущих планах.
120.
Функции и работа системы.В комплексе «Планета» используется многооконный интерфейс. Он имеет
следующие страницы: «Рейс», «ВС», «Аэропорты», «Адреса», « Тексты
телеграмм»
Текущий и суточный планы ведутся непосредственно диспетчером, путем
отправки телеграмм и ввода изменений на основе информации, полученной от
диспетчеров других АДП, осуществляющих текущее планирование, а также от
АС УВД, установленной в данном районе.
В меню текущего плана есть шаблоны телеграмм, которые диспетчер АДП
обязан передавать согласно руководящим документам (табель сообщений).
Передача телеграммы осуществляется путем выбора рейса и нажатия кнопки с
типом телеграммы, необходимой для отправки.
Планы полетов могут быть переданы из таблицы заявок нажатием кнопки с
типом предварительного плана полетов или из заранее заготовленного шаблона.
Подготовка адресов рассылки телеграмм может осуществляться вручную при
помощи шаблонов, либо автоматически. Для автоматического заполнения адресов
необходимо указать маршрут полета в виде зон РЦ. План-сводка распечатывается
отдельно по вылетам, по посадкам, по транзиту.
121.
Срок хранения архивов устанавливается в соответствии с административнымизадачами. Архивируются следующие данные:
• телеграммы переданные, принятые;
• текущий план;
• журнал, где регистрируются действия пользователей.
Телеграммы архивируются в текстовом виде в формате баз данных. Текущий
план также хранится в формате баз данных
Для взаимодействия с источниками данных используется программа «Телекс»,
которая выполняет прием, передачу телеграмм и обмен ими с ЦКС.
«Телекс» сопрягается с телеграфным каналом при помощи телеграфного адаптера
и обеспечивает возможность работы по телеграфным каналам и/или по другим
физическим каналам, обеспечивающим следующие требуемые характеристики:
• контроль состояния каналов связи на нарушение и восстановление
работоспособности (например, обрыв);
• передачу (0, 20, 40 минут каждого часа) и контроль приема (в период от 56 до
4, от 16 до 24, от 36 до 44 минут) контрольных канальных сообщений;
• посылку служебных сообщений при отсутствии на приемных каналах
контрольных канальных сообщении;
• синтаксический и семантический контроль принимаемых сообщений;
122.
• ведение порядковой нумерации принимаемых сообщений, анализа обозначенияпередачи (строки, заголовка), автоматическое формирование и передачу в канал
соответствующих служебных сообщений и запросов при несовпадении
ожидаемого и принятого обозначения передачи (обеспечивающих их
взаимосогласованную автоматическую подстройку порядковой нумерации
приема/передачи и повтор пропущенных сообщений);
• автоматическое формирование и передачу в канал подтверждения получения
сообщения соответствующей категории срочности;
• присвоение каждому исходящему сообщению соответствующего обозначения
передачи, порядкового номера и времени передачи, изменение нумерации при
смене даты и при превышении номером числа 999 с введением соответствующей
серии;
• организацию очередности передачи сообщений в канал в соответствии с их
категорией срочности;
• обеспечение приоритетной передачи сообщений высшей категории срочности;
• автоматическую обработку, формирование и передачу служебных сообщений;
• архивирование принятых сообщений всех типов;
• хранение принятой и переданной информации с организацией текущего
(суточного) и долговременного архивов;
• автоматическое ведение статистической информации по каналу;
• автоматическое формирование и непрерывную передачу в канал, находящийся в
тестовом режиме работы, серии тестовых сообщений для его проверки и
настройки.
123.
Интернет-порталИнтернет-портал должен обеспечить пользователю воздушного пространства доступ к аэронавигационной,
метеорологической информации, а также возможность подачи плана полета для использования воздушного
пространства классов A, C и G. На портале размещаются странички (ссылки) для обращения к официальным
сайтам Минтранса России, Росавиации, Росгидромета, ФГУП «ЦАИ» для получения метеорологической и
аэронавигационной информации, обращения к нормативным документам.
Интернет-портал
должен
обеспечивать пользователю прием,
обработку плана полета по сети
Интернет,
представление
оперативной
информации
об
ограничениях
в
воздушном
пространстве
(NOTAM,
зоны
ограничения полетов – пилотажные
зоны, полигоны, противоградовые
стрельбы, использование участков
СВТ и др.).
124.
125.
126.
127.
Основные принципы построения представления планов полетов сиспользованием телефонной сети общего пользования и сети Интернет
Основные мероприятия построения Системы сбора планов полетов (Система)
по сети Интернет состоят в следующем:
• для обеспечения приема заявок по сети Интернет и каналам телефонной связи
потребуется на первом этапе развернуть подсистему из 8 программноаппаратных комплексов на 8 объектах ЕС ОрВД: в Главном и семи зональных
центрах ЕС ОрВД;
• основные работы:
поставка и развертывание веб-серверов и АРМ обработки планов полетов в
центрах ЕС ОрВД;
разработка специального программного обеспечения обработки планов
полетов, поступающих по сети Интернет и телефонным каналам связи;
проведение организационных мероприятий по авторизации пользователей
(эксплуатантов ВС) с целью обеспечения их доступа к веб-серверам по сети
Интернет (назначение и распределение ip/id-адресов/паролей и др.).
Создание Регистра авторизованных (зарегистрированных) пользователей;
организация ведения Регистра пользователей. Информацию о пользователях
собирает, анализирует и предоставляет Росавиация.
128.
129.
Состав и структура системы представления планов полетовКаждый комплект оборудования, устанавливаемый в центре ЕС ОрВД, представляет собой программноаппаратный комплекс, включающий:
• серверное оборудование и программное обеспечение в дублированном исполнении (веб-сервер);
• оборудование и программное обеспечение автоматизированного рабочего места (АРМ),
предназначенного для приема и обработки планов полетов, поступающих как по телефонной сети
общего пользования, так и по сети Интернет;
• оборудование связи
130.
Унифицированный узел приема и обработки планов полетовГоловным элементом Системы является веб-сервер ГЦ ЕС ОрВД, где осуществляется хранение и ведение
единой базы структуры воздушного пространства и данных пользователей воздушного пространства
(Регистра пользователей), имеющих право подавать планы полетов воздушных судов (планы полетов) по сети
Интернет и по телефонной сети общего пользования (в ГЦ ЕС ОрВД).
131.
Функционально-технологический алгоритм работы системы представленияпланов полетов
Система выполняет следующие основные функции:
• идентификацию (установление тождественности, «опознание») пользователей,
предпринимающих попытку ввода данных в Систему, по базе данных
авторизованных
пользователей
воздушного
пространства
(Регистру
пользователей);
• прием и обработку планов полетов, поступающих от авторизованных
пользователей воздушного пространства по сети Интернет с использованием
единого адреса подачи, а также телефонной сети общего пользования;
• автоматическое распределение получаемых от пользователей планов полетов по
узлам системы (зональным/региональным подсистемам) в соответствии с
заданными характеристиками планов (трассовый/внетрассовый полет, зона
вылета);
• предоставление
пользователям
необходимых
информационных
и
вычислительных ресурсов (сервисов) для составления и проверки формируемых
планов полетов;
• автоматическое направление принятых планов полетов на обработку в КСА ПВД
ГЦ (ЗЦ) и получение от КСА ПВД ГЦ (ЗЦ) результатов обработки;
• предоставление удаленным авторизованным пользователям результатов
обработки поданных ими планов полетов на веб-сайте Системы.
132.
133.
Первоначальный вход в систему представления планов полетовПосле ввода пользователем пароля и логина сервер ГЦ ЕС ОрВД осуществляет идентификацию пользователя
по базе данных авторизованных пользователей воздушного пространства (Регистру пользователей) и
открывает доступ в Систему.
Пользователь, прошедший процедуру идентификации, имеет возможность:
• сформировать и подать новый план полета;
• просмотреть состояние ранее поданных планов, получив информацию об их статусе
(приняты/отвергнуты).
134.
Отправка плана полета – получение результатаПодача нового плана полета осуществляется путем заполнения экранной формы в виде стандартного бланка
представленного плана полета (флайт-плана) на русском или английском языке.
Процесс заполнения отдельных полей бланка максимально автоматизирован путем предоставления выбора
возможных значений полей, контекстной подсказки, использования ранее сохраненных значений и т.д.
Система «помогает» пользователю составить корректный план полета, в котором заполнены все необходимые
поля, а сами данные в этих полях правильные.
Система не допускает подачу плана с незаполненными или неправильно заполненными полями.
Все планы трассовых полетов (тип полета – трассовый) автоматически направляются на обработку в ГЦ ЕС
ОрВД, остальные – в «свой» ЗЦ ЕС ОрВД.
Корректно сформированный и принятый сервером ГЦ (ЗЦ) план полета передается в КСА ПВД ГЦ (ЗЦ), где
проходит стандартную обработку.
Необходимо отметить, что форма плана полета (ФПЛ) не отличается от используемой в настоящее время.
По каждому плану от КСА ПВД ГЦ/ЗЦ в соответствующий сервер Системы поступает ответное сообщение
(информация), отражающая решение, которое принято в ГЦ/ЗЦ по данному плану в результате его обработки:
• план полета прошел все виды контроля, корректен и может быть включен в план ИВП ГЦ (ЗЦ) (план полета
принят);
• план не прошел все виды контроля и не может быть включен в план ИВП ГЦ (ЗЦ) (план отвергнут, ошибки и
т.д.).
Прием планов полетов по телефону выполняется с использованием АРМ Системы.
Оператор по приему планов полетов по телефону выполняет с АРМ идентификацию заявителя, вводя в ручном
режиме пароль и логин, сообщенные ему пользователем, и далее осуществляет ввод данных плана полета в
Систему, используя те же сервисы, что и удаленный пользователь.
Дальнейшая обработка полученных по телефону и введенных вручную с АРМ Системы планов должна
выполняться по процедурам, аналогичным процедурам обработки планов полетов, поступивших по сети
Интернет
135.
136.
Вариант представления оперативной информации об ограничениях ИВП навеб-сайте ЗЦ ЕС ОрВД
137.
ДЗГЛОБАЛЬНЫЙ АЭРОНАВИГАЦИОННЫЙ ПЛАН
Doc 9750-AN/963 Четвертое издание – 2013 год
Внедрение процедур A-CDM в аэропорту Шереметьево
Концепция конкретизирует общий процесс совместного принятия решений, включая
следующие его характеристики:
процесс совместного принятия решений (collaborative decision making (CDM)) позволяет
всем участникам процесса участвовать в принятии затрагивающих их решений по
организации воздушного движения (ОрВД), т.е. CDM не ограничивается какой-либо
отдельной сферой, например аэропортом или полетами по маршруту;
процесс CDM будет действовать по отношению к решениям всех уровней, начиная от
долгосрочного планирования и кончая реальными операциями;
процесс CDM можно применять как активно, так и пассивно, посредством совместно
согласованных процедур;
эффективное управление информацией и совместное ее использование позволят всем
участникам процесса получать информацию, оказывающую важное влияние на решения
других участников;
любой участник процесса может предложить вариант решения (это приносит особую
пользу в сочетании с эффективным осуществлением функции управления информацией).
Задачи системы A-CDM для аэропорта Шереметьево заключаются в повышении
эффективности планирования и использования ресурсов, обеспечении бесперебойной работы
аэропорта при тесном взаимодействии всех партнеров по A-CDM (рисунке ).
138.
Задачи A-CDM139.
Ключевые концептуальные изменения включают следующие решения:• процесс совместного принятия решений на стратегическом этапе обеспечит
оптимизацию использования средств для получения максимальной отдачи и
послужит основой для прогнозируемого распределения и планирования;
• процесс коллективного принятия решений, по мере возможности, на
предтактическом этапе позволит корректировать использование средств,
распределение ресурсов, прогнозируемые траектории, структуризацию
воздушного пространства и планирование времени прибытия/отправления
для аэродрома Шереметьево и района воздушного пространства в целях
устранения любого дисбаланса;
• на тактическом этапе действия будут включать динамичное изменение
времени прибытия/отправления для аэродрома и района воздушного
пространства и корректировку расписания пользователями.
• В комплексе процесс A-CDM может применяться для широкого спектра
мероприятий от стратегического планирования (например, инвестиций в
инфраструктуру) и до операций в реальном масштабе времени.
• Реализация концепции A-CDM в аэропорту Шереметьево определяет
порядок внедрения основных шести элементов, рекомендованных
Евроконтролем.
140.
Элемент концепции «Обмен информацией» системы A-CDM дляаэропорта Шереметьево реализован на базе инновационной разработки
специалистов Шереметьево AODB «Синхрон» (airport operation date base
(AODB)) для обеспечения принятия решений на местном уровне для
каждого из партнеров и упрощения процессов реализации элементов
системы A-CDM за счет:
• объединения систем обработки данных различных партнеров,
участвующих в процессе реализации системы A-CDM для аэропорта
Шереметьево;
• предоставления одного, общего набора данных, описывающих статус и
цели полета;
• функционирования объединённой базы данных AODB «Синхрон» в
качестве IT-платформы для обмена информацией между партнерами.
• Архитектурное IT-решение AODB «Синхрон»
• Центральное оборудование системы Синхрон базируется на технологии
Oracle Real Application Cluster и использует 2 сервера HP ProLiant 560.
Вычислительная мощность серверов позволяет обеспечивать работу
2000 клиентов системы единовременно, кластер позволяет
обеспечивать отказоустойчивость в режиме 7/24 (рис.).
141.
Архитектура IT-платформы «Синхрон»142.
Алгоритм расчета пропускной способностикомплекса ИВПП
143.
Элемент концепции «Поэтапный подход» заключается в дальнейшем повышении уровня общей ситуационной осведомленностивсех партнеров в аэропорту Шереметьево в случае прибывающего рейса и на этапах нахождения воздушного судна на
промежуточной стоянке между двумя рейсами. Более подробно можно выделить следующие цели:
определить значимые события, позволяющие отслеживать статус полетов, и распределить данные ключевые события по
этапам;
определить измененные информационные данные и инициирующие события: новые параметры, обновление выходных
расчетных данных, аварийные сообщения, уведомления и т.д.;
определить качество данных в терминах точности, своевременности, надежности, стабильности и предсказуемости на основе
данных окна времен перехода;
гарантировать связь между прибывающими и вылетающими рейсами в аэропорту Шереметьево;
обеспечить раннее принятие решения при возникновении прерывания события; повысить качество информации.
Основные этапы A-CDM
144.
Поэтапный подход фокусируется на:наборе отобранных этапов на протяжении всего полета (прибытие, приземление,
постановка на стоянку, нахождение на стоянке, выруливание и отправление), во
время которых меняются партнеры, вовлеченные в процесс организации полета;
эффективности временных затрат, которая измеряется отдельно для каждого этапа и
между двумя этапами
145.
При возникновении необходимости закрыть одну ИВПП на очистку илиремонтные работы, оперативные работники аэропорта, Шереметьевского Центра
по обслуживанию воздушного движения (ШЦ ОВД) и базовых перевозчиков
анализируют обстановку на перронах и воздушную обстановку в части
интенсивности движения ВС. Путем моделирования определяется период и
продолжительность закрытия ИВПП, и соответственно норматив пропускной
способности ИВПП (НПС ИВПП) (рис.) в данный период времени.
Интервал закрытия вносится в систему, и автоматика пересчитывает НПС ИВПП.
Данный алгоритм оперативного расчета пропускной способности комплекса ИВПП
обеспечивает гибкий подход к формированию потоков прилетающих и вылетающих
ВС с учетом категорий ВС по турбулентности спутного следа и позволяет точно
прогнозировать интервалы, где возникнет перегрузка, что позволяет своевременно
произвести корректирующие мероприятия
146.
АВТОМАТИЗАЦИЯ НАБЛЮДЕНИЙ ЗА ВОЗДУШНОЙ ОБСТАНОВКОЙ.Методы представления радиолокационной информации в цифровой форме для
АС УВД.
Основным источником информации о воздушной обстановке в АС УВД выступают
радиолокационные комплексы типа ТРЛК «Лира-Т» - 1РЛ-139, 1Л-118, РЛК
«Скала», РЛК «Утес-Т», ВРЛ «Крона», ВРЛ «Радуга», АОРЛ-85ТК - ДРЛ-7СМ,
«Экран-85», «Урал».
Сегодня в различных регионах РФ функционирует ряд разнотипных районных
(трассовых) АС УВД. Среди них есть как зарубежные АС типа «Теркас», так и
отечественные АС типа «Стрела», «Альфа», «Строка-Ц» и другие.
— автоматизированный сбор от пользовател
ей воздушного пространства заявок на его
использование;
— автоматизированное составление сводного суточного плана ИВП и рассылка его
взаимодействующим и обеспечивающим органам УВД;
— автоматизированную корректировку планов ИВП в процессе текущего планирования и
оповещение о корректировке взаимодействующих и обеспечивающих служб УВД;
— автоматизацию процессов сбора, обработки и отображения данных о воздушной и
наземной обстановке и плановой информации с помощью КСА и АРМ должностных лиц
пунктов и центро управления;
— контроль выполнения планов ИВП и управление ВС при полетах по ВТ, МП, МВЛ;
— доведение режимов ИВП до органов УВД и пользовател
ей ВП.
147.
Основные ТТХ ряда существующих районных АС УВД и места их развертывания приведены втаблице. Аэроузловые АС УВД функционируют на базе районных АС УВД в полном или
сокращенном составе.
Тип районной АС
УВД
«Теркас»
«Стрела»
«Альфа»
КАРМ
«Строка-Ц»
Место развертывания Москва (Внуково)
Ростов-на-Дону
Санкт-Петербург
Вологда, Иркутск
Волгоград
Сопряжение с РЛС,
АРП, РСБН, ВРЛ
Представление
информации о ВО
Вторичная обработка
радиолокационной
информации
Третичная обработка
радиолокационной
информации
Количество
сопровождаемых ВС
Сопряжение с AFTN,
обработка плановой
информации
Планирование для
сектора УВД вне ВТ
С любыми РЛС и
ТРЛК
С любыми РЛС и
ТРЛК
1-РЛ-139, ТРЛК-11,
АРП, РСБН
1-РЛ-139, ТРЛК-11,
АРП, РСБН
1-РЛ-139, ТРЛК-11,
АРП, РСБН
Аналогово-цифровое
Аналогово-цифровое
Аналогово-цифровое
Аналогово-цифровое
Аналогово-цифровое
По вс
ем ВС по ПРЛ и По вс
ем ВС по ПРЛ и По вс
ем ВС по ПРЛ и По вс
ем ВС по ПРЛ и По вс
ем ВС по ПРЛ и
ВРЛ
ВРЛ
ВРЛ
ВРЛ
ВРЛ
До 8
радиолокационных
позиций
До 5
радиолокационных
позиций
До 10 РЛС и АРП
До 10 РЛС и АРП
«Мозаика», до 5 РЛС
До 300
До 200
До 600
До 300
До 72 на РМ
СП-3000, ТП-600
СП-3000, ТП-600
AFTN, отображение
AFTN, отображение
AFTN, отображение
плановой информации плановой информации плановой информации
+
+
+
2-я фаза текущего
планирования
—
Наличие сопряжения с
действующими
+
системами связи
+
—
+
+
—
+
—
На уровне AFTN
—
+
—
ГС, ВС
+
ГС, ВС
Сопряжение с другими
На уровне AFTN
АС УВД
Сопряжение с АСУ
+
МО РФ
Наличие ЛВС
—
Эксплуатант
ГС, ВС
Примечание: ГС — гражданский сектор; ВС — военный сектор
С помощью выносного
—
РМ
+
+
ГС
ГС
148.
В последние годы заменены: 1РЛ-139 на ТРЛК "Лира-Т", ДРЛ-7СМ на АОРЛ-85ТК,приводные радиостанции АПР-7 на АРМ-150, АРП "Платан" сменил АРП-75,
выработавший ресурс VOR/DME заменили на РМА-90/РМД-90. Для покрытия зоны
МДП устойчивой радиосвязью ОВЧ-диапазона введены в эксплуатацию четыре радио
трансляторы. Заменены устаревшие средства связи ОВЧ-диапазона типа "Баклан",
"Полет" на новые средства серии "Фазан", частично радиоприемники ВЧ-диапазона Р155 на радиоприемники "Сосна" и ПТ-100 ПРМ. Аппаратура документирования
аудиозаписей типа ШХР заменена многоканальной системой регистрации
диспетчерских переговоров "Авиатон".
Установлены комплексы средств
автоматизации УВД "КОРИНФ", автоматизированная система передачи фактической
погоды в районе аэродрома АТИС с системой отображения СВИП, ЦКС "Монитор" и
другое оборудование.
149.
В 2015 году АО «ЧРЗ «Полет» получены сертификаты на типовую конструкцию иправо производства обзорного радиолокатора АОРЛ-1АМ. АОРЛ-1АМ
предназначен для замены устаревших и выработавших свой ресурс радиолокаторов
ДРЛ-7СМ, работающих в диапазоне частот, занятом телевидением и сотовой
связью. В настоящее время на территории России в эксплуатации осталось порядка
50 радиолокаторов ДРЛ-7СМ, выпущенных Челябинским радиозаводом «Полет» в
1970-80 годах. Основные параметры АОРЛ-1АМ аналогичны АОРЛ-1АС.
Дальность действия АОРЛ-1АМ по первичному каналу меньше, чем у АОРЛ-1АС,
но превосходит дальность действия, обеспечиваемую ДРЛ-7СМ. Конструкторская
документация на радиолокатор АОРЛ-1АМ разработана в четырех исполнениях.
АОРЛ-85 аэродромный обзорный радиолокатор нового поколения
150.
Бортовые и наземные радиолокационные средства автономный вторичныйрадиолокатор «Радуга» и комплекс автоматизации радиолокационных позиций
«Радуга-2» ВНИИРА-ОВД
Двухдиапазонный автономный вторичный радиолокатор (АВРЛ) — «Радуга» и КА
РЛП «Радуга-2».
Разработанный комплекс предназначен для работы с АС УВД в качестве основного
источника информации о воздушной обстановке, поступающей от самолетных
ответчиков, работающих в режимах УВД и RBS, а также от первичных РЛС, и может
применяться как:
•Комплекс автоматизации радиолокационных позиций (КА РЛП) — «Радуга-2»,
обеспечивающий автоматизацию УВД посредством создания РЛК с цифровой
обработкой и объединением информации первичных РЛС и ВРЛ на базе сопряжения
с РЛС типа 1РЛ-139 и других, используемых в интересах всех ведомств;
•Автономный вторичный радиолокатор (АВРЛ) «Радуга» с цифровой обработкой
вторичной радиолокационной информации, сопрягаемый с любой первичной РЛС,
имеющей АПОИ. АВРЛ «Радуга» создан на основе многолетнего опыта по
разработке отечественного ВРЛ типа «Корень» и аппаратуры первичной обработки
информации.
151.
Рассмотрим процесс обработки и отображения радиолокационной информации (РЛИ),поступающей обзорного РЛ. Основным вопросом в данном случае является
представление поступающей РЛИ в цифровой форме.
Сформулируем основные критерии для выбора преобразования
РЛИ из аналоговой формы (в которой она поступает от РЛК) в
цифровую:
снижение потерь полезной информации при выполнении
преобразования;
минимизация затрат необходимого процессного времени;
удобство последующей обработки цифровой информации
(например, возможность передачи по каналам связи, запись
информации и т.д.);
Для этих целей можно использовать два варианта представления РЛИ в цифровой
форме:
серверный (групповой);
распределенный.
Распределенный способ предполагает заведение аналогового сигнала на каждый
радиолокатор, занимающийся обработкой обзорной РЛИ. Распределенная обработка в
этом случае позволяет с помощью пользовательского интерфейса управлять
режимами цифрового преобразования (например, изменяя разрешающую способность
преобразования при выборе масштаба на данном рабочем месте).
152.
Распределение обработки позволяет организовать резервирование серверов на случайих отказа, что повышает «живучесть» системы.
Однако в этом случае возникает ряд проблем, к которым можно отнести следующие:
необходимость установки специальной аппаратуры сопряжения на каждый компьютер;
«удлинение» аналогового канала (т.е. необходимо отдельно подводить аналоговый сигнал к
каждому компьютеру);
увеличение нагрузки (имеется в виду входное сопротивление аппаратуры сопряжения), т.е.
уменьшается уровень сигнала, что требует введения соответствующих кабельных усилителей
и возможно появление дополнительных искажений сигнала из-за возникновения наводок;
ограничения по дальности передачи аналогового сигнала приводят к ограничению
максимального расстояния от радиолокационной позиции (РЛП) до рабочих мест, а для
собственно трансляции аналогового сигнала требуется применение специализированного
оборудования;
необходимость вариации настроек аппаратуры сопряжения приводит к различному виду
получаемого на выходе сигнала;
вследствие подключения аналогового сигнала по схеме «шина», обрыв кабеля приводит к
прекращению трансляции РЛИ на всех комплектах устройств отображения, располагающихся
после места обрыва, и к ухудшению качества РЛИ на остальных комплектах в результате
возникновения рассогласованности линии;
при изменении уровня входного сигнала требуется подстройка аппаратуры сопряжения на
каждом из комплектов.
153.
Серверная (групповая) обработка аналогового сигнала РЛИ предполагает вводсигнала в систему через сервер и дальнейшую передачу цифрового сигнала по
каналам связи до конечного потребителя. При этом цифровой сигнал передается без
искажений на любые расстояния по стандартным цифровым каналам, а удобство
настройки и регулировки устройств сопряжения влияет одновременно на
отображаемую информацию для всех конечных пользователей.
Однако при этом возникает необходимость проведения цифрового преобразования с
максимальной разрешающей способностью, так как масштабирование изображения
конечным пользователем не должно влиять на качество отображаемой информации.
Кроме того, в этой системе отказ, сбой, неправильные настройки серверного
оборудования в равной степени влияют на всех конечных пользователей.
Вариант
подключения
необходимо
выбирать, ориентируясь на конфигурацию
данной конкретной системы и используя
компромиссные решения.
Применение АМКП улучшает оперативность и
объективность отображения, восприятия и оценки
воздушной обстановки, повышает эффективность
контроля за соблюдением порядка использования
воздушного пространства.
154.
Структурная схема АПОИУК – устройство квантования; УОС ПРЛ – устройство обработки сигналов ПРЛ; УОМ – устройство
обработки Метео; УС – устройство синхронизации; УУК – устройство управления критериями; УУ и
АВК – устройство управления и автоматического встроенного контроля; ККУ – канал управления и
контроля; УПК – устройство проверки кодов; СВ – специализированный вычислитель; УС и АПД –
устройство сопряжения с аппаратурой передачи данных
155.
Структурная схема АМРК «АСУ-МРЛ» в составе АРМинженера МРЛ, АРМ руководителя АВ на градовые
процессы, АРМ аэролога, АРМ синоптика АМСГ, АРМ
синоптика ЦГМС и сервера сети МРЛ СК УГМС
156.
Мультисенсорные наблюдения.Для АС УВД характерно использование данных наблюдения от различных
источников информации (секторов). Это позволяет снизить погрешность отдельных
замеров и повысить устойчивость и достоверность наблюдений. Такой метод
наблюдения получил название мультисенсорного. В этой проблеме можно выделить
ряд задач, которые требуют разработки соответствующих методов и алгоритмов их
решения: • оценивание параметров состояния (координат и параметров
движения);
• сравнительная оценка достоверности информации, получаемой от
различных сенсоров;
• построение интегрированных траекторий и обеспечение их
непрерывности.
Кроме решения этих основных задач требуется выполнить целый ряд
дополнительных процедур, вытекающих из разнородности сенсоров (как
функциональной, так и топологической), к которым относятся:
• пересчет измерений в единую систему координат;
• приведение измерений к единому времени.
Для этой цели используются соответствующие алгоритмы, основанные
применении корреляционных методов.
на
157.
В качестве сенсоров применяются различные РЛС, поэтому далее будемиспользовать термин «мультирадарная обработки информации».
Результатом
мультирадарной
обработки
информации
являются
мультирадарные траектории движения ВС, рассчитанные из реальных
траекторий по специальным алгоритмам. В зависимости от обстоятельств при
формировании мультирадарной траектории может использоваться траектория,
формируемая по данным от одной РЛС или сразу от нескольких РЛС, измерения
которых усредняются с различными весовыми коэффициентами.
Основным методом мультирадарной обработки является введение некоторого
фиктивного наблюдателя, который можно назвать виртуальным радаром. Этот
метод может быть применен как в случае однородных измерителей (например,
обзорных РЛС), так и в случае наличия разнородных источников информации
(это имеет место при совместном использовании радиолокационного наблюдения
и радиопеленгаторов).
158.
необходимые преобразования измерений, связанные с переходом к единомувремени и к единой системе координат, выполнены для всех датчиков-измерителей
(сенсоров).
Суть метода состоит в том, что сочетается независимая обработка
информации от каждого отдельного источника и совместная
обработка результатов, которая интерпретируется как появление
дополнительного наблюдения, а именно виртуального радара.
Потенциальный выигрыш, получаемый с
объясняется следующими обстоятельствами:
помощью
виртуального
радара,
• большим объемом обрабатываемой информации;
• возможным устранением (или ослаблением влияния) случайных
как постоянных, так и переменных систематических
погрешностей измерений.
Траектории от каждой РЛС вначале обрабатываются и сглаживаются независимо. При этом полагаем, что
от каждой реальной РЛС на вход мультирадарного устройства подается некоторое число простых
траекторий. Каждая простая траектория содержит информацию о сглаженных координатах и скорости в
какой-то момент времени, что позволяет рассчитывать координаты цели в любой последующий момент
времени. Любая из траекторий
имеет свое качество, которое характеризуется
точностью и
достоверностью оценок координат. Тогда алгоритм мультирадарной обработки предполагает хранение
мультирадарных траекторий. Каждая мультирадарная траектории содержит в себе список номеров
простых траекторий от радарных РЛС, в соответствии с которым она формируется, и собственные
рассчитанные параметры движения цели. В результате мультирадарной обработки создается виртуальный
радар, информация от которого выдается потребителям с определенной периодичностью.
159.
Алгоритм мультирадарной обработки.Отыскание свободных траекторий и построение для них мультирадарной
траектории (МРТ)
«Склеивание» траекторий
Анализ качества траекторий и расчет весов
Расчет оценок координат и параметров движения МРТ
Выдача результатов потребителям
160.
Отыскание свободных траекторий и построение дляних мультирадарной траектории (МРТ)
«Склеивание» траекторий
Анализ качества траекторий и расчет весов
Расчет оценок координат и параметров движения МРТ
Выдача результатов потребителям
1. Берутся простые траектории (от реальных
РЛС), которые не привязаны ни к какой
МРТ. Их называют свободными и для
каждой из них заводят МРТ.
2. Перебирают МРТ, время жизни которых не
превысило заданное число (10 –15)
отсчетов. Находят среди них близкие
(расхождение в курсе, местоположении и
высоте для которых не превышает
заданные ограничения). Если такие
траектории находятся, то их «склеивают» в
одну.
3. Для каждой МРТ статистически рассчитывают веса входящих в нее траекторий. За основу
расчета берут статические (ранее назначенные) веса, которые задаются в качестве
параметров мультирадарной обработки с учетом априорной информации о РЛС (анализ
записей сигналов за предыдущий период). Статический вес траектории должен зависеть от
погрешности данной РЛС, количества ложных меток, вероятности пропуска отметки,
наличия лепестков и переотражений. Итоговый статистический вес РЛС определяется из
его статического веса с использованием информации о качестве траектории в предыдущие
интервалы времени. При наличии пропусков отметок вес траектории снижается, так как
очевидно, что в этом случае погрешность оценок параметров движения возрастает.
4. Рассчитывают координаты, скорость и курс цели для МРТ как линейную комбинацию
параметров входящих в нее реальных траекторий с соответствующими весами.
5. Выдают рассчитанные параметры целей потребителям в качестве отсчетов виртуального
радара для построения траекторий, прогноза и т.д.
161.
КОМПЛЕКС СРЕДСТВ АВТОМАТИЗАЦИИ НАБЛЮДЕНИЙ ЗА ВОЗДУШНОЙОБСТАНОВКОЙ.
⦁Автоматизация принятия решений.
В
состав АС УВД «Альфа» входит подсистема обработки и отображения
информации – КСА УВД «Альфа», т.е. система наблюдении за воздушной
обстановкой. Подсистема КСА ПВД «Планета», входит в состав АС УВД «Альфа»,
так же как и КСА УВД «Альфа». Но основу КСА УВД «Альфа» составляют системы
и устройства, связанные с обработкой и отображением радиолокационной
информации. Все эти вопросы в достаточном объеме отражены в учебной
дисциплине «Радиолокационные системы». При описании особенностей построения
КСА УВД «Альфа» остановимся только на описании тех процессов, которые
характерны и специфичны именно для АС УВД.
162.
АС УВД «Альфа» 5163.
Автоматизация принятия решений в АС УВД на основе имеющейся информации отсредств наблюдения.
Необходимое условие автоматизации решения задач УВД состоит в соблюдении
существующей технологии действий диспетчера. Она в свою очередь сводится к
описанию алгоритмов действий диспетчера в той или иной сложившейся ситуации.
Соответственно степень автоматизации АС УВД будет зависеть от количества
описанных в системе условий. Реакция системы на сложившиеся условия может
быть трех видов:
• сигнализация наступления событий, которая может сопровождаться выдачей
соответствующих расчетов и параметров;
• выдача рекомендаций по действиям диспетчера в сложившейся ситуации;
• автоматическое действие системы, направленное на разрешение сложившейся
ситуации.
164.
Для автоматизации принятия решений в современных АС УВДследующие функции:
реализованы
обнаружение и сигнализация конфликтных ситуаций (КС) между ВС;
прогнозирование
воздушной
обстановки
и
сигнализация
возможного
возникновения потенциально конфликтной ситуации (ПКС) между ВС;
обнаружение и сигнализация достижения минимальной безопасной высоты;
согласование условий входа/выхода ВС между смежными диспетчерскими
пунктами;
сигнализация прохождения контрольных точек;
сигнализация пересечения рубежей приема/передачи;
сигнализация пересечений/попаданий в зону запретов и ограничений;
расчет и предложение оптимальной очередности захода ВС на посадку;
сигнализация нарушения параметров установленной траектории при заходе ВС на
посадку;
корректировка плановой информации по фактическим данным как в рамках одной
системы, так и между смежными центрами УВД;
присвоение/предложение свободных кодов ВРЛ воздушным судам, входящим в зону
действия РЛК во избежание появления повторяющихся кодов.
В свою очередь проблема предотвращения столкновений ВС в воздухе имеет три фазы
своего решения.
Первая – обнаружение и сигнализация об угрозе столкновения.
Вторая состоит в выработке управляющих команд.
Третья – в исполнении этих команд.
165.
Определяющим для выбора варианта решения задачи является наличие полнойинформации о ВС в той области ВП, где создалась угроза столкновения. Эту
информацию обеспечивают бортовые системы предотвращения столкновений
(БСПС). БСПС могут взаимодействовать с диспетчерами
ВРЛ или работать
независимо от них. Каждая БСПС позволяет в радиусе до 25 м.миль (45 км) и более
оценить параметры движения ВС, наличие угрозы столкновения, выработать
рекомендации по предотвращению КС и провести согласование рекомендаций для
конфликтующих ВС.
Выполнение этих операций возможно, если
ВС оборудованы БСПС и самолетными
ответчиками, обеспеченными каналами
дискретно-адресной связи, позволяющей
обмениваться информацией как между ВС,
так и с наземными диспетчерскими
пунктами.
Пилоты ВС выполняют только те маршруты,
которые соответствуют визуальным и речевым
предупредительным
и
корректирующим
рекомендациям БСПС. Диспетчер УВД при
получении информации от пилота о выполнении
маневра в соответствии с рекомендациями БСПС
воздерживается
от
указаний,
которые
противоречат рекомендациям.
166.
Ответственность за выдерживание норм эшелонирования ВС, участвующими вразрешении конфликта по командам БСПС, вновь возвращается диспетчеру УВД
после наступления следующих событий:
• диспетчер подтвердил получение от пилота донесения о том, что его
сопровождаемое ВС вновь вернулось на заданную траекторию;
• диспетчер подтвердил получение от пилота донесения, что его ВС возобновляет
выполнение текущего диспетчерского разрешения, но выдает новое
альтернативное разрешение, получение которого подтверждается экипажем.
167.
Д.З168.
169.
170.
171.
172.
173.
174.
175.
176.
177.
178.
179.
180.
181.
182.
183.
184.
185.
186.
187.
188.
189.
190.
191.
192.
193.
⦁Функция предотвращения КС.⦁Одна из главных задач диспетчера УВД – обеспечить соблюдение норм
эшелонирования для каждого участника ВД. Нормы эшелонирования можно
представить в виде геометрического защитного объема, построенного вокруг ВС,
параметрами которого являются действующие в данной зоне ответственности службы
УВД нормы эшелонирования для каждого ВС (вертикальное и продольное). Тогда КС
можно определить как попадание в защитный объем контролируемой ВС других
участников ВД. Если под КС подразумевать сближение двух ВС, вызванное
нарушением (по крайней мере одним из них) норм горизонтального и/или
вертикального эшелонировании, то под ПКС следует понимать ситуацию, которая
может привести к конфликтной, если не изменить пространственно-временные
траектории участвующих в ней ВС (по крайней мере одного из них).
Прогноз воздушной обстановки
Обнаружение ПКС
Анализ причин и характера ПКС
Определение типа ПКС
Назначение маневрирующего ВС
Выбор типа маневра
Расчет параметров маневра
Контроль ситуации
Структурная схема процесса обнаружения и
разрешения ПКС.
194.
Алгоритм предотвращения КС должен удовлетворять ряду требований,отвечающих принятой в настоящее время технологии работы диспетчера УВД:
прогноз КС и обнаружение ПКС должны осуществляться с временным и пространственным запасом,
достаточным для: расчета маневра; передачи команд на борт ВС; выполнения маневра для разрешения
(парирования) КС;
анализ причин и характера возникновения КС должен определить способ дальнейших действий;
если ПКС вызвана маневрированием ВС в вертикальной плоскости, то должны быть приняты меры к
изменению параметров маневра или к его прекращению;
разрешение КС, возникшей из-за сближения ВС на одном эшелоне, должно осуществляться маневром
только одного ВС, что повышает безопасность полетов и снижает напряженность ситуации, как для
диспетчера УВД, так и для экипажа ВС;
маневр осуществляется, как правило, только в горизонтальной плоскости. Это позволяет снизить риск
возникновения «повторных» КС на одном высотном эшелоне. Маневр по высоте допускается только в
исключительных ситуациях;
назначение маневрирующего ВС должно быть обоснованно прокомментировано диспетчером;
вид (тип) маневра должен прямо и непосредственно выбираться из небольшого списка стандартных схем;
стандартный маневр состоит не более, чем из трех участков: S-образный отворот, прямолинейный отрезок
(которого может и не быть) и S-образный маневр возврата на плановую (исходную) траекторию;
максимальное боковое ускорение (максимальный крен и темп его изменения) должно подчиняться
ограничениям для данного типа ВС;
при выборе схемы (типа) маневра предпочтение отдается той, при которой обеспечивается минимальное
отклонение от плановой пространственно-временной траектории;
алгоритм обнаружения ПКС, выбора и расчета схемы разрешающего маневра должен работать в режиме
реального времени и допускать внесение определенных коррекций в случае необходимости;
параметры маневра и его схема должны быть наглядно представлены на экране видеомонитора.
195.
Отсюда следует, что существует принципиальная возможность формулировки задачивыбора оптимального маневра по критерию минимума интегрального выражения вида:
tB
S Z t dt ,
tH
где t H , t B моменты времени начала и окончания маневра, Z t модуль
бокового отклонения от плановой траектории.
задачу оптимизации маневра можно записать в следующем формализованном виде
tB
Sopt min Z t dt ,
п П
tH
где п П – параметры п для маневра (максимальный крен и темп его
изменения) из общей области возможных значений параметров П.
196.
Наиболее радикальным способом решения задачи выявления ПКС является полныйперебор всех возможных вариантов, при котором тест на обнаружение ПКС
производится последовательно для каждого участника ВД с остальными в каждой
зоне ответственности службы УВД. При этом исходными данными в задаче
выявления ПКС являются:
• координаты участников ВД;
• нормы эшелонирования, которые зависят от
следующих условий:
зоны ответственности службы УВД, в которой
находится контролируемое ВС;
правил полетов, по которым осуществляется полет
контролируемого ВС;
направлений движения каждого из ВС для
определения
типа
взаиморасположения
(параллельные/пересекающиеся/встречные курсы);
• тип источника информации, от которого получены
данные о каждом ВС (ПРЛ, ВРЛ, АЗН и т.д.).
197.
В результате обнаружения и анализа ПКС возможна реализация следующихдействий:
• звуковая сигнализация;
• выделение конфликтных объектов на средствах отображения
(цветом, контурной обводкой, мерцанием и т.д.);
• автоматическое
отображение
(или
по
требованию)
дополнительной информации (текущее расстояние между
конфликтующими ВС в плане и /или по высоте и т.д.);
• автоматическое
отображение
(или
по
требованию)
рекомендаций по разрешению ПКС (в виде рекомендованных
курсов движения, векторов направления движения и т.д.);
• занесение в журнал системы сообщения со всеми
соответствующими данными для последующего расследования.
Для всех типов современных АС УВД функции обнаружения и сигнализации КС
являются обязательными.
В основе решения задачи обнаружения ПКС лежит прогнозирование изменения ВО
во времени и в пространстве. Процесс прогнозирования можно начинать уже на
этапе планирования ВД. Для этого каждый план должен иметь данные о плановой
траектории движении и плановом времени начала полета (вылет или вход в зону
ответственности службы УВД).
198.
Для ВС, сопровождаемых по данным РЛС (или других сенсоров), расчетпрогнозируемой траектории движения осуществляется при каждом обновлении
координат. В расчете учитываются следующие параметры: путевая скорость, курс
(путевой угол и, возможно, скорость его изменения), плановая траектория,
глубина прогнозирования.
Расчет прогнозируемой траектории движения ВС обычно производится одним из
двух относительно простых алгоритмов (как правило, линейного характера).
Выбор алгоритма зависит от наличия плановой траектории и степени
достоверности этой траектории (точного совпадения реальной траектории
движения ВС с плановой обычно не наблюдается по известным причинам).
По первому алгоритму расчет прогнозируемого положения ВС осуществляется по
прямой линии (первая модель движения) на основании данных о путевой скорости
и курсе (путевом угле).
По второму алгоритму прогнозируемая траектория состоит из двух участков:
• траектория от последнего положения ВС до точки выхода на плановую трассу;
• траектория от точки выхода на плановую трассу и далее по ней.
Выбор глубины прогнозирования производится, исходя из категории решаемой
задачи.
199.
Процедура определения ПКС осуществляется по следующему алгоритму:1. Составляется двумерная таблица (время – положение) расчетных
положений на весь прогнозируемый период (например, 5 минут) с
некоторым шагом (например, 10 секунд).
2. Производится последовательная проверка на определение
возникновения ПКС по алгоритму, описанному выше (см. рис. 5),
для каждого элемента таблицы контролируемого ВС со всеми
соответствующими элементами расчетных таблиц других ВС.
3. Если в результате анализа была определена возможность появления
ПКС на одном из шагов последовательной проверки, то
фиксируются границы конфликтной зоны.
Необходимая глубина прогнозирования ВО при оценивании ПКС рассчитывается
с учетом следующих основных параметров:
• возможная максимальная скорость сближения ВС;
• время принятия решения диспетчером УВД для разрешения
возможной КС;
• время на передачу команды диспетчером УВД экипажам
конфликтующих ВС;
• время реакции пилота на осуществление маневра.
200.
Величина шага при расчете временной таблицы соответствует минимальномувремени обновления информации (из всех имеющихся сенсоров) о положении ВС.
По результатам обнаружения ПКС в различных АС УВД возможна реакция
действий, описанных выше, т.е.:
• звуковая сигнализация;
• выделение конфликтных объемов и т.д.
Для АС УВД наличие функций обнаружения и сигнализации ПКС не является
обязательным и носит рекомендательный характер, в отличие от функций
обнаружения и сигнализации КС, являющихся обязательными.
Причины возникновения ложных тревог при определении КС
недостаток и недостоверность исходных данных для определения точных норм
эшелонирования;
погрешности измерений или сбой в работе источников информации.
Причинами возникновения ложных тревог при определении ПКС :
отсутствие или недостоверность плановой траектории (особенно в маневренных
зонах, например, в зоне взлета и посадки);
отсутствие планового вертикального профиля;
значительные изменения скоростного режима (например, в зоне взлета и посадки).
201.
Пример пропуска конфликтной ситуации показан на рисунке 6, а примервозникновения ложной тревоги – на рисунке 7.
ВС1
Зона предполагаемого конфликта
ВС2
V1
А
V2
V2
Зона
конфликта
ВС2
Рис.
6.
Пример
пропуска
конфликтной
ситуации,
где
сплошные
линии
показывают
маршрут плановых полетов ВС1 и
ВС2,
а
пунктирная
линия
показывает прогноз движения ВС2
после т. А маршрута.
А
V1
ВС1
Рис. 7. Пример возникновения
ложной тревоги, где сплошные
линии
показывают
маршрут
плановых полетов ВС1 и ВС2, а
пунктирная
линия
показывает
прогноз движения ВС2 после т. А
маршрута.
Вероятность ложных тревог при КС и ПКС является одним из параметров,
характеризующих качество функционирования АС УВД.
Таким образом, в целях максимального уменьшения вероятностей появления
ложных тревог и пропусков ПКС и КС необходим как можно более полный сбор
исходных данных (при условии наличия соответствующей степени достоверности
и оперативности).
202.
КОМПЛЕКС СРЕДСТВ АВТОМАТИЗАЦИИ ОБРАБОТКИ ИОТОБРАЖЕНИЯ ИНФОРМАЦИИ
Назначение и состав КСА УВД «Альфа».
Основной системой комплекса средств наблюдений является КСА «Альфа», первый
вариант которого известен как система отображения «Норд».
Комплекс средств автоматизации управления воздушным движением «Альфа»
(КСА УВД «Альфа») является универсальной системой, обеспечивающей
управление на всех стадиях полета, включая взлет, набор высоты, заход на посадку,
а также контроль на протяжении всего маршрута. Комплекс предназначен для
автоматизации центров ОВД со средней и высокой интенсивностью воздушного
движения. Он обеспечивает прием, обработку, отображение и интеграцию
информации о воздушной обстановке, плановой, метеорологической и
аэронавигационной информации на дисплеях высокого разрешения рабочих мест
специалистов ОрВД. Процессы анализа воздушной обстановки, процедуры ОВД и
пультовые операции полностью автоматизированы.
203.
Источниками информации КСА УВД «Альфа» могут являться все типырадиолокационных станций и радиопеленгаторов, метеостанции и комплексы,
спутниковые системы навигации и ОВД (АЗН-В, АЗН-К), наземные телеграфные
каналы и цифровые линии. РЛС и РЛК типа 1РЛ-139, ДРЛ-7СМ, Экран-85 и др., при
этом возможна совместная обработка информации от
нескольких РЛС (как от первичных, так и от вторичных).
Кроме того, в комплексе предусмотрено сопряжение с
радиопеленгатором, аппаратурой АРМ диспетчера АДП,
аппаратурой АРМ «Метеоролог», сетью АФТН и др.
КСА УВД ОБЕСПЕЧИВАЕТ:
•сбор и обработку информации наблюдения от источников различных типов;
•мультисенсорную обработку информации наблюдения (RDPS);
•получение и обработку плановой информации (FMS);
•объединение плановой информации и информации наблюдения;
•прием и распределение метео- и аэронавигационной информации;
•отображение на едином дисплее информации о текущей и прогнозируемой воздушной обстановке, плановых
данных, метео- и аэронавигационной информации;
•рекомендации по обеспечению безопасности: краткосрочные и среднесрочные предупреждения о конфликтах,
предупреждение о приближении к запретным зонам, предупреждение о минимальной безопасной высоте
(STCA , MTCD , MSA W, TSN);
•контроль за выдерживанием планового маршрута, процедур вылета и прибытия;
•беcстриповую технологию процедурного контроля;
•безголосовое взаимодействие между смежными секторами и смежными центрами по протоколу обмена
данными в реальном масштабе времени;
•безголосовое взаимодействие по линии передачи данных «диспетчер — пилот».
204.
КСА УВД «Альфа» используется в качестве подсистемы обработки и отображенияинформации о воздушной обстановке в АРАС УВД «Альфа».
Применяется для оснащения рабочих мест специалистов ОрВД на пунктах
районных центров (РЦ), диспетчерских пунктов подхода (ДПП), диспетчерских
пунктов круга (ДПК), диспетчерских пунктов системы посадки (ДПСП), пунктов
диспетчера посадки (ПДП), стартовых диспетчерских пунктов (СДП) и
диспетчерских пунктов руления (ДПР), а также сменных инженеров, старших
диспетчеров и руководителей полетов служб УВД и ЭРТОС аэропортов и
авиакомпаний ГА.
Состав КСА УВД «Альфа»
Групповое оборудование
Автоматизированное рабочее место (АРМ) диспетчера УВД
с радиолокационным контролем (РЛК, дублированный)
АРМ диспетчера процедурного контроля
АРМ диагностики и управления
Оборудование локальной вычислительной сети
Комплект ЗИП
205.
КСА УВД «Альфа»206.
По функциональным возможностям КСА УВД «Альфа» находится в ряду наиболеесовершенных систем по управлению воздушным движением в РФ. Он разработан в
соответствии со стандартами и рекомендациями ИКАО и Евроконтроля (COPS , ODIDIV, REFGHMI) и учитывает особенности технологии УВД в России и странах СНГ.
Комплекс имеет модульную архитектуру, позволяющую добавлять новые рабочие
места, а также сохранять работоспособность в режиме сокращенного состава
технических средств при отказах аппаратуры.
Архитектура комплекса предусматривает 100%-е резервирование.
КСА УВД «Альфа» обеспечивает:
• многооконный графический интерфейс, соответствующий современным рекомендациям
Евроконтроля
• отображение на экране аналоговой и цифровой траекторий информации, а так же полетных
данных
• сопровождение целей по первичному и вторичному каналу
• построение сглаженных траекторий движения воздушных судов с объединением данных от
нескольких источников информации (траекторная и мультисенсорная обработка)
• автоматический ввод в сопровождение ВС при поступлении полетной информации
• сопряжение с системой планирования воздушного движения и сопровождение целей в
режимах «трек по плану» и «маршрут по плану» при отсутствии координатной информации
• прогнозирование положения ВС и сигнализацию о потенциальных конфликтах (TP, CD&R)
207.
• прогнозирование положения ВС и сигнализацию о потенциальных конфликтах (TP, CD&R)• обнаружение и сигнализацию о конфликтных ситуациях и нарушениях минимальной
безопасной высоты (STCA , MSA W)
• система разрешения конфликтных ситуаций (CORA )
• среднесрочное обнаружение конфликтных ситуаций (MTCD )
• средства контроля (MONA)
• отображение данных радиопеленга на рабочем месте (до четырех каналов одновременно)
• отображение цветной картографической информации, поддержку цифровых векторных карт
• обработку и отображение признаков бедствия и аварийных ситуаций
• возможность оперативного изменения диспетчером вида информации на мониторе
• оперативное переключение интерфейса при изменении структуры ВП (объединение секторов
УВД, смена рабочего курса ВПП, запреты и ограничения ИВП и др.)
• автоматизированное согласование между секторами УВД
• автоматизированное согласование между системами смежных центров УВД по процедуре OLDI
• взаимозаменяемость всех рабочих мест
• синхронизацию всех систем комплекса от системы точного времени
• технический контроль и диагностику аппаратуры и ПО
• аварийную и функциональную световую и звуковую сигнализацию
• аппаратное совмещение с диспетчерским тренажером для обучения, тренировки и повышения
уровня профессиональной подготовки диспетчеров УВД
• документирование и архивирование информации с возможностью оперативного поиска и
просмотра, а также ее выдачу на внешние цифровые системы документирования
• защиту информации от несанкционированного доступа
• дополнительные сервисные функции (записная книжка, специализированный калькулятор,
сигнализация заданных по времени событий, отображение справочной информации и т. п.)
208.
КСА УВД «Альфа» используется в качестве подсистемы обработки и отображения информации овоздушной обстановке в АРАС УВД «Альфа».
Применяется для оснащения рабочих мест специалистов ОрВД на пунктах районных центров (РЦ),
диспетчерских пунктов подхода (ДПП), диспетчерских пунктов круга (ДПК), диспетчерских
пунктов системы посадки (ДПСП), пунктов диспетчера посадки (ПДП), стартовых диспетчерских
пунктов (СДП) и диспетчерских пунктов руления (ДПР), а также сменных инженеров, старших
диспетчеров и руководителей полетов служб УВД и ЭРТОС аэропортов и авиакомпаний ГА.
Области применения
• отображение на едином дисплее информации о текущей и прогнозируемой воздушной
обстановке, плановых данных, метео- и аэронавигационной информации.
• рекомендации по обеспечению безопасности: краткосрочные и среднесрочные
предупреждения о конфликтах, предупреждение о приближении к запретным зонам,
предупреждение о минимальной безопасной высоте (STCA , MTCD , MSA W, TSN )
• контроль за выдерживанием планового маршрута, процедур вылета и прибытия
• беcстриповую технологию процедурного контроля
• безголосовое взаимодействие между смежными секторами и смежными центрами по
протоколу обмена данными в реальном масштабе времени
• безголосовое взаимодействие по линии передачи данных «диспетчер — пилот» КСА УВД
«АЛЬФА» рекомендован Министерством транспорта РФ для оснащения предприятий
гражданской авиации (ГА).
Эксплуатируется более чем в 100 центрах УВД и аэропортах ГА.
209.
Технические характеристикиИсточники РЛИ - ОРЛ-Т 1РЛ-139,1Л-118, «Скала», «Утес-Т», «Лира-Т»,
«Корень-АС»,Крона», МВРЛ-СВК, «Радуга», «Аврора», ОРЛ-А, ДРЛ-7 СМ,
«Иртыш», «Экран-85», АОРЛ-1АС, «Лира-А», Сопка-2, РТС, РСБН-4Н, РСП-6М2,
РСП-10МН
Источники АРП - АРП-75, АРП-95, АРП «Платан», DF-2000
Источники метеоинформации - КРАМС, АИС «МетеоСервер», АМИС РФ
Интерфейсы взаимодействия со средствами РТО - C-2, ASTERI X, ПРИОР, КОРС,
Ладога
Количество сопровождаемых целей - до 500
Количество сопровождаемых целей в режиме автосопровождения - до 100
Время работы от источника бесперебойного питания не менее - 20 мин
Наработка на отказ - 20 000 ч
Среднее время восстановления - не более 20 мин
Технический ресурс - 10 лет
Средства отображения информации - цветные ЖКИ мониторы с диагональю от
19” с разрешением не менее 1280 x 1024
Рабочая освещенность в плоскости экрана - до 350 лк
Повышенная освещенность в плоскости экрана - до 1000 лк
210.
Система имеет распределенную архитектуру, в которой каждая ЭВМвыполняет свою, независимую от другой ЭВМ, функцию. Распределённая
архитектура позволяет оптимизировать связь, наращивать системы и
модернизировать их. Такая архитектура допускает работу в режиме
сокращенного состава технических средств, что обеспечивает полную
эксплуатационную готовность системы при возникновении локальных
отказов.
Для упрощения технического обслуживания и сокращения затрат в
течение срока службы оборудование комплекса «Альфа» ориентировано
на максимальное использование стандартных средств.
К нестандартному оборудованию относятся:
• устройство
преобразования
радиолокационной
информации;
• устройство сопряжения с АРП;
• платы сопряжения с сетью АФТН;
• часть интерфейсного оборудования.
Вычислительный комплекс строится на базе ПЭВМ и/или рабочих
станций.
211.
Рассмотрим, более подробно, структуру КСА УВД «Альфа»,РЛ
позиция
АРМ
АДП
к линии АФТН
Сервер
РМ 1
Сервер
РМ 2
ЛВС
РМ n-1
РМ n
к АРП
Рабочие места
(РМ) диспетчеров
КДП
Комплекс «Альфа включает в себя групповое и индивидуальное оборудование.
Групповое оборудование осуществляет прием и обработку РЛИ, а также передачу
обработанной информации на РМ диспетчеров средствами ЛВС.
Индивидуальное оборудование осуществляет прием и отображение РЛИ, принятой
и обработанной в групповом оборудовании.
212.
В состав группового оборудования входят:• модуль централизованной обработки (только для сетевого варианта) – сервер
системы;
• коммуникационное оборудование;
• модуль распределения исходных сигналов РЛС (только для локального
варианта).
В состав индивидуального оборудования входят:
• модуль отображения динамической воздушной обстановки (ДВО) – рабочая
станция диспетчера;
• модуль сопряжения с АРП.
Комплекс также включает модуль
преобразования РЛИ, входящий в состав
группового оборудования.
213.
Обработка плановой информации осуществляется отдельной подсистемой –аппаратурой АРМ диспетчера АДП.
Модуль отображения комплекса «Альфа» способен воспроизводить первичную,
координатную информацию в оцифрованной аналоговой форме, вторичную
координатную и дополнительную (полетную) информацию в цифровой и в
оцифрованной аналоговой формах.
Модуль преобразования РЛИ включает устройство
двух типов:
1. Скан-конвертер (по одному на каждый ПРЛ);
2. Дешифратор активного канала (по одному на каждый ВРЛ);
Скан-конвертер преобразует сигналы ПРЛ в цифровую форму для получения
координатной информации в оцифрованной аналоговой форме. Дешифратор
активного канала преобразует исходные сигналы ВРЛ в цифровую форму для
получения координатной информации в оцифрованной аналоговой форме и
производит дешифрирование полетной информации по каналам УВД и RBS. В том
случае, если в состав РЛС входит АПОИ, возможно использование информации от
АПОИ в цифровой форме.
214.
Модуль преобразования РЛИ формирует кодограммы следующих типов:1. Кодограмма сервера.
2. Кодограмма оцифрованной аналоговой (первичной или вторичной)
координатной информации.
3. Кодограмма вторичной координатной и полетной информации.
В зависимости от типа РЛС и конкретных условий модуль преобразования РЛИ
располагается либо целиком на КДП, либо частично на радиолокационной
позиции (РЛП), а частично на КДП. Во втором случае обмен данными между
РЛП КДП осуществляется по телефонным линиям при помощи модемов. Для
обеспечения надежности связь с каждой РЛП осуществляется по двум
параллельным линиям связи.
Модуль централизованной обработки представляет собой сервер РЛИ. В
целях повышения надежности устанавливают два комплекта серверов –
основной и резервный, которые полностью взаимозаменяемы. Сервер РЛИ
получает от модуля преобразования РЛИ данные от всех используемых РЛС и
обеспечивает их рассылку по рабочим местам диспетчеров.
215.
Модуль отображения ДВО выполняет следующие функции:• принимает преобразованные к внутреннему виду радиолокационные
данные от серверов;
• принимает преобразованные к внутреннему виду данные от
устройства сопряжения с АРП;
• осуществляет сопровождение ВС;
• отображает карту ВП, ВО, плановую и пеленгационную информацию;
• обеспечивает сохранение индивидуальных настроек рабочего экрана
для каждого диспетчера на каждом РМ;
• обеспечивает ввод диспетчером оперативных данных и другие
пультовые операции.
Каждый комплект представляет собой IBM – совместимый
персональный компьютер, оснащенный графическим SVGA
(Super Video Graphics Array – тип видеоадаптера) –
монитором.
Для обмена данными компьютеры объединяются в ЛВС,
причем все компьютеры
имеют взаимонезависимое
подключение
к ЛВС и все основные коммуникации
продублированы.
216.
217.
Комплекс Средств Автоматизации (КСА) УВД Альфа-5.218.
219.
220.
Обработка планов полетов в КСА «Альфа».Обработка планов полетов осуществляется входящей в состав
КСА
«Альфа» аппаратурой
АРМ диспетчера УВД, о чем
говорилось в разделе «КОМПЛЕКС СРЕДСТВ АВТОМАТИЗАЦИИ
ПЛАНИРОВАНИЯ ВОЗДУШНОГО ДВИЖЕНИЯ». См. Слайд 110 - 122
Здесь вопрос рассмотрим более подробно.
АРМ диспетчера АДП предназначен для работы по предварительному, суточному и
текущему планированию на основе Центрального расписания, повторяющихся
планов полетов и рейсов, выполняемых вне расписания (заявок типа «ППЛ»).
Предусмотрено соединение АРМ с линией АФТН, автоматизация основных процедур
по составлению, получению и обработке исходящих и приходящих телеграмм.
АРМ АДП осуществляет обработку сообщений сети АФТН и распределение планов
полетов. Обработка планов полетов включает представление каждого полученного
сообщения в стандартных формах, выдачу диспетчеру сообщений о выявленных
ошибках, идентификацию каждого сообщения в соответствии с установленной
классификацией, принятой в ГА, последующий автоматический или ручной ввод в
базу данных, корректировку планов полетов по информации, полученной из
нескольких источников.
221.
АРМ диспетчера АДП позволяет:осуществлять предварительное планирование движения ВС на основе
Центрального расписания и повторяющихся планов полетов;
составлять расписание движения ВС на заданную дату по данным Центрального
расписания и заявок;
осуществлять суточное планирование на основе расписания движения ВС и заявок
типа «ППЛ»;
автоматически составлять расписание движения ВС на текущие сутки с
разделением на вылет и прилет;
создавать предварительные планы полетов в полуавтоматическом режиме в виде
таблицы или путем заполнения экранной формы;
производить обработку повторяющихся планов полетов и автоматическую
активизацию планов;
создавать гибкие выходные формы по данным Центрального расписания,
суточного и текущего планов полета;
передавать заранее подготовленные и оперативно составленные телеграммы по
сети АФТН согласно табелю сообщений о движении ВС, а также телеграммы в
произвольной форме;
принимать по сети АФТН и обрабатывать телеграммы с целью коррекции
существующих планов полетов и заявок;
создавать архивы текущих планов полетов на вылет и прилет, принятых и
переданных телеграмм с указанием выходной формы архива;
создавать выходные формы по данным архивов.
222.
Для создания карты ВП в состав комплекса «Альфа» входят два специальныхпрограммных средства – генератор схемы, предназначенный для задания структуры
ВП – географических точек, пунктов обязательного донесения (ПОД), трасс,
маршрутов и генератор подложки, позволяющий определить внешний вид схемы,
т.е. задать конкретные обозначения пунктов, аэродромов, осевых трасс, коридоров и
прочих объектов. Оба генератора также предназначены для внесения в схему
изменений, возникающих в процессе эксплуатации комплекса.
Функционирование КСА УВД «Альфа».
Циркулирующая в комплексе «Альфа» информация может быть разделена на
статическую и динамическую части.
К статическим данным относятся:
карта ВП включает:
карта ВП;
параметры ВС;
параметры зон управления и аэродромов;
нормативная и справочная информация.
секторы управления;
географические точки и ПОД;
аэродромы;
маршруты;
трассы.
223.
Помимо этого, картографическая информация описывает способ визуализациивсех объектов ВП – обозначение пунктов, аэродромов, трасс и т.д.
К динамической информации относится: координатная (цифровая и
оцифрованная аналоговая) и полетная информации, пеленгационная информация,
планы полетов и сообщения о корректировке планов полетов.
Блок полетной информации содержит:
• координаты ВС;
• позывной (режим УВД) или код
ответчика (режим RBS);
• текущую высоту;
• остаток топлива (только режим УВД).
Плановая информация включает:
тип ВС;
предписанный эшелон;
планируемое время входа в зону управления;
принадлежность ВС.
224.
См. Слайд 84-89225.
Система регистрации полетной информации, содержащая последовательно соединенные блок сбора ипреобразования информации, защищенный магнитный накопитель и пульт ввода данных, отличающаяся тем, что
она дополнительно снабжена пультом индикации и управления, первый выход которого связан со вторым входом
защищенного магнитного накопителя, блоком регистрации, контроля и анализа, первый, второй и третий входы
которого связаны соответственно со вторым выходом пульта индикации и управления, выходом блока сбора и
преобразования информации и вторым выходом защищенного магнитного накопителя, а выход блока
регистрации, контроля и анализа связан со входом пульта индикации и управления, при этом четвертый, пятый,
шестой и седьмой входы блока регистрации, контроля и анализа связаны соответственно с выходом
навигационной системы, выходом комплекса радиоконтроля, информационным выходом и синхровыходом
спутниковой радионавигационной системы.
226.
Система наблюдения осуществляет сопровождение ВС, Под сопровождениемпонимается периодическое регулярное обновление координатной и бортовой
дополнительной информации.
Сопровождение производится по ВС, оборудованных самолетными ответчиками
(режимы УВД и RBS), путем сравнения бортового номера (код ответчика),
полученного от ВРЛ или от АПОИ, в каждом очередном обзоре с хранящимися в
комплексе данными.
При этом ввод ВС в сопровождение производится автоматически. Каждый
комплект индивидуального оборудования, установленный на рабочем месте
диспетчера осуществляет сопровождение ВС автономно.
Предтактический (суточный) план полетов строится на основе объединения
данных от нескольких источников: Центрального расписания, заявок и
телеграмм.
При этом Центральное расписание и заявки вводятся и
корректируются с рабочего места диспетчера АДП, а телеграммы поступают
через устройство сопряжения с линий АФТН.
227.
На рабочем месте диспетчера УВД отображается информация от разныхисточников:
• карта ВП;
• координатная РЛИ в оцифрованном аналоговом виде;
• координатная РЛИ в цифровом виде (метки ВС);
• полетная РЛИ и оперативно вводимые данные по ВС в виде
формуляров сопровождения;
• пеленгационная информация в виде линий радиопеленга
(до 4-х каналов одновременно) и численных значений
прямого и обратного пеленгов;
• план полета;
• справочная и нормативная информация.
Карта ВП состоит из нескольких групп элементов, которые можно оперативно
включать и выключать, регулируя, таким образом, детальность изображения.
При одновременном использовании нескольких РЛС имеется возможность
выбирать один или несколько источников отображаемой информации.
Информация от каждого источника может отображаться своим цветом. Имеется
возможность открытия на рабочем месте одного или нескольких
дополнительных окон со своим набором источников РЛИ.
228.
Формуляр сопровождения состоит из трех строк по десять знакомест в каждой строке,и позволяет выводить следующую информацию:
• код ответчика;
• позывной;
• признак сектора управления;
• признак бедствия;
• высота текущая;
• тенденция изменения высоты;
• высота заданная;
• пункт назначения;
• азимут, дальность;
• широта, долгота;
• остаток топлива;
• предписанный эшелон.
Формат формуляра включает в себе восемь полей, каждое из которых несет
следующую информацию (рисунок):
2
1
4
7
5
3
6
8
Рис. Формат формуляра сопровождения.
229.
12
Поле 1: 1) код автоматизации ВС;
6
5
4
2) радиотелефонный позывной ВС.
7
8
Поле 2: признак рабочего места, на управлении которого находится ВС.
Поле 3: дополнительная информация, которая может принимать следующие
значения: «Б» – если от ВС поступил сигнал бедствия.
Поле 4: значение текущей высоты в десятках метров (с буквой «А» на первом
знакоместе относительно уровня аэродрома, без буквы «А» – относительно
уровня с атмосферным давлением со значением 760 мм рт.ст.).
Поле 5: символ тенденции изменения высоты (« » – набор высоты, « » –
снижение высоты).
Поле 6: 1) заданный диспетчером эшелон в сотнях метров;
2) сокращенное название пункта назначения.
Поле 7: 1) путевая скорость ВС (в км/ч) с буквой «С» на первом знакоместе;
2) остаток топлива (в процентах) с буквой «Т» на первом знакоместе;
3) азимут ВС с буквой «А» на первом знакоместе;
4) географическая широта ВС в формате: первые три цифры – градусы,
следующие две цифры – минуты.
Поле 8: 1) предписанный эшелон в сотнях метров с буквой «Н» на первом
знакоместе;
2) курс ВС с буквой «К» на первом знакоместе;
3) удаление ВС с буквой «Д» на первом знакоместе;
4) географическая долгота ВС в формате: первые три цифры – градусы,
следующие две цифры – минуты.
3
230.
231.
232.
КЛАССИФИКАЦИЯ И КРАТКАЯ ХАРАКТЕРИСТИКА АВТОМАТИЗИРОВАННЫХСИСТЕМ ЕС ОрВД.
Классификация автоматизированных систем.
Автоматизированные системы, связанные с воздушным движением, классифицируют
по назначению и по районам применения.
По назначению различают
• АС планирования воздушного движения (АС ПВД), непосредственного УВД (АС
УВД)
• совмещенные системы, которые также называют АС УВД, но в них как
составляющая часть могут входить АС ПВД.
В зависимости от обслуживания ВС различают следующие АС по районам
применения:
• по системам планирования – для главного, зонального и районных центров ЕС
ОрВД;
• по системам непосредственного УВД – районные, аэродромные, аэроузловые и
смешанные АС УВД;
• АС контроля за движениям наземного транспорта.
233.
- в 1975 г. разработана первая отечественнаяАС УВД "СТАРТ", включающая обработку
радиолокационной информации ВРЛ и ПРЛ
и элементов текущих планов полета;
в 1986 г. разработана АС УВД второго
поколения
"СПЕКТР",
в
которой
автоматизирована не только обработка
радиолокационной информации, но и в
полном объеме - плановой информации,
включая расчет пространственно-временных
(4D) траекторий, а также анализ воздушной
обстановки на бесконфликтность(STCA,
MSAW);
в 90-х годах создан унифицированный ряд
(УР)АС УВД "СИНТЕЗ" наивысшего уровня
автоматизации (MONA, SNET, MTCD…),
удовлетворяющий
рекомендациям
EUROCONTROL
и
обеспечивающий
бесстриповую технологию УВД.
234.
В последние годы ядром оборудования центров УВД стали АС и КСА.Выше были рассмотрены КСА ПВД «Планета» и КСА УВД «Альфа».
АС УВД «Старт».
Первая отечественная АС УВД «Старт»,
последующего ряда АС УВД
заложила
основу
для создания
АС УВД «Старт» обеспечивала автоматизированный сбор и обработку координатной
РЛИ по всем ВС независимо от того, оборудованы они ответчиками системы ВРЛ
или нет, реализовывала автоматическое сопровождение 36 ВС, находящихся в зоне
действия обзорной РЛС, и до двух ВС, заходящих на посадку и находящихся в зоне
действия посадочной РЛС. По ВС, оборудованным самолетными ответчиками, были
автоматизированы сбор и обработка дополнительной информации, передаваемой по
информационному каналу системы ВРЛ (бортовой номер ВС, высота полета, потеря
радиосвязи и некоторая другая информация).
В качестве
основных источников информации о воздушной обстановке
использовались обзорная и вторичная РЛС, а при наблюдении за ВС на
предпосадочной прямой – посадочный радиолокатор. Данные о координатах ВС от
РЛС транслировались по узкополосным телефонным, широкополосным кабельным
и радиорелейным линиям. Вспомогательным источником информации являлся АРП.
235.
Вычислительный комплекс состоял из двух ЭВМ: одна – основная, втораянаходилась в нагруженном режиме (переход на резервную ЭВМ осуществлялся
автоматически). Каждая ЭВМ принимала информацию о координатах ВС и данных
о нем, получаемых от системы вторичной радиолокации, проверяла правильность
получаемой информации, а затем подвергала ее вторичной обработке, которая
сводилась к завязке траектории, построению траектории движения ВС,
вычислению параметров движения, необходимых диспетчеру, в том числе и
экстраполированных значений координат, одновременно решалась задачи
идентификации траекторий, т.е. их принадлежности данному ВС.
Подсистема отображения и оперативного управления предназначалась для
отображения на совмещенном плане-индикаторе (СПИ) ВО радиолокационной
координатной информации, представленной в цифровой и аналоговой формах,
буквенно-цифровых
формуляров
дополнительной
информации
по
сопровождаемым ВС. Суть СПИ состояла в том, что на одном экране отображались
отметки от всех ВС, находящихся в зоне управления, а рядом с отметками –
формуляры ВС, которые находились под управлением у диспетчера, причем данная
информация отображалась в зоне структуры ВП.
236.
Используемые методы отображения информации определяли три режимаотображения:
1. Совместный, когда на экране одновременно отображалась
радиолокационная, графическая и дополнительная знаковая
информация.
2. Радиолокационный, при котором на фоне статической
графической
информации
отображалась
аналоговая
радиолокационная информация.
3. Знаковый, предусматривающий отображения знаковой
информации на фона статической графической.
Комплекс «Старт» в своей основе уже имел все те основные подсистемы, которые
входят в состав современных АС УВД. Были приняты меры по обеспечению
высокого уровня надежности (для того времени – 70-е годы), обеспечению
соответствующей степени автоматизации и т.д. Но технические, вычислительные,
организационные и другие возможности комплекса «Старт» не позволяли его
использовать по мере увеличения интенсивности полетов и нарастания плотности
ВД. На смену комплекса «Старт» приходили другие АС УВД, начиная с АС УВД
«Спектр».
237.
АС УВД «Спектр».Комплекс «Спектр» позволяет осуществлять автоматизированное УВД на всех этапах
полета ВС в ВП аэроузла, включая посадку, взлет и руление (частично). АС УВД
«Спектр» отличается от АС УВД «Старт» более совершенной и полной обработкой
РЛИ, наличием подсистем обработки планов полетов и метеоинформации, существенно
большими вычислительными возможностями и объемами решаемых задач.
Разработана и внедрена в эксплуатацию в аэропорту Пулково. По количеству решаемых
функциональных задач превосходила все зарубежные аналоги на момент ее создания.
Технология, методы решения функциональных задач были разработаны специалистами
НЭЦ АУВД и ВНИИРА – основным разработчиком системы. В рамках этого проекта
впервые была создана комплексная автоматизированная система метеорологического
обеспечения «Метеоячейка –С2»,
решены задачи предупреждения о конфликтных ситуациях в воздухе, о снижении ВС
ниже минимально безопасной высоты и др. Отработанные в процессе внедрения этой
системы технологические решения легли в основу типовых требований к ряду АС
УВД, стран-членов СЭВ. Проект соответствующего документа был разработан НЭЦ
АУВД и одобрен на заседании КРЭП СЭВ в 1988 г.
238.
В функции АС УВД «Спектр» входит сбор и обработка данных: координатнойинформации о действительном местонахождении ВС (по сигналам ПРЛ и ВРЛ, причем
информация от обоих радиолокаторов объединяется); информации о планах полетов;
информации, поступающей с рабочих мест диспетчеров подхода, круга,
руководителей полетов аэроузлового диспетчерского центра (АДЦ), а также
диспетчеров старта, руления, посадки аэродромного командно-диспетчерского пункта
(АКДП) трех аэродромов аэроузла.
Кроме того, ведется прием, обработка и передача информации, циркулирующей в
АФТН (плановой и метеорологической); автоматически рассчитываются и печатаются
элементы планов полетов (так называемые «стрипы»); обрабатывается и отображается
информации о фактической и прогнозируемой погоде,
об очагах опасных
метеоявлений; отображаются данные об ограничениях ВП.
В комплексе «Спектр» предусмотрены:
• идентификация координат ВС с помощью АРП;
• документирование и воспроизведение информации о ВО, а также речевой
информации, передаваемой по внутренним и внешним каналам связи;
• тренировка диспетчерского состава на резервных пультах;
• непрерывный функциональный и тестовый контроль работоспособности
оборудования.
239.
В результате обработки разнообразной информации комплекс определяет ипредупреждает диспетчеров о возможных КС и о снижении ВС ниже минимально
безопасной высоты.
Источниками информации служат РЛК, посадочные радиолокаторы, ЦКС АФТН,
приемо-передающий центр, подсистема обработки метеоинформации об очагах
опасных метеоявлений «Метеоячейка – С2», комплексные радиотехнические
автоматические метеостанции (КРАМС).
Индикаторы ВО могут работать в трех режимах:
1. Аналоговый, когда отображаются метки азимута, дальности и отметки ВС.
2. Синтетический, в котором отображаются синтетические отметки местоположений ВС с
формулярами сопровождения, картографическая информация, плановая информация в виде
списков входа и вылета, метеоинформация и сведения о положении очагов опасных
метеоявлений, границы действующих ограничений для полетов, информация,
предупреждающая диспетчера о снижении ВС ниже минимально безопасной высоты,
возможности возникновении КС и т.п., дополнительная знаковая и графическая системная
информация.
3. Совместный, когда сочетаются аналоговая и синтетическая информация.
В АС УВД «Спектр» был впервые применен принцип модульного построения
системы, который позволяет на базе функциональных блоков комплекса «Спектр»
создавать АС различной емкости и производительности не только для районов
аэродромов, но и для РЦ, образуя интегрированные аэродромно-районные АС УВД
240.
Районная АС УВД «Теркас».Диспетчерский зал АС УВД комплекса ТЕРКАС
Районные АС УВД являются наиболее сложными, так как объекты системы
разнесены на большой территории, число радиолокационных позиций велико
241.
Районная АС УВД «Теркас» решает следующие основные задачи:автоматический ввод в сопровождение и автоматическое сопровождение ВС по
данным вторичных и первичных РЛС (ПРЛ);
буквенно-цифровое отображение информации о действительном и планируемом
движении;
автоматизированный прием-передачу ВС на управление внутри системы и с
внешними АС;
прием и обработку информации о планах полета на этапах предварительного и
текущего планирования;
расчет и отображение текущих планов полетов и информации о планируемой
загрузке отдельных элементов структуры ВП;
коррекцию текущих планов полета по РЛИ;
прием и отображение метеоинформации и информации от ОВЧрадиопеленгаторов;
документирование, оперативное воспроизведение информации о ВО, а также
информации, передаваемой по внутренним и внешним каналам связи;
объединение РЛИ от РЛС, установленных на радиолокационных позициях.
В состав структурной схемы районной АС УВД «Теркас» входят
радиолокационная подсистема, включающая 10 радиолокационных позиций
(Московский район УВД) и центр управления.
242.
Каждая радиолокационная позиция содержит ПРЛ с радиопрозрачнымукрытием (в Московской зоне УВД – это ПРЛ типа АТСR-22, ATCR-44,
ТРЛК-10, УТЕС-А, УТЕС-Т) и сопряженный с ним ВРЛ (в Московской
зоне УВД – это ВРЛ типа Корень-АС, Радуга-В, МВРЛ-СВК, Крона),
сдвоенный комплект комбинированной АПОИ, АРП, а также ОВЧрадиостанцию с аппаратурой дистанционного управления и модемы
подсистемы связи и передачи данных.
Центр управления 10 связан с каждой РЛП двумя узкополосными
линиями связи с пропускной способностью по 2400 бит/с каждая.
Линии связи имеют встроенный канал обратнной связи с малой
пропускной способностью (75 бит/с). Он используется для контроля
параметров линии и в случае неисправности одной из линий выход АПОИ
(комплект АПОИ также называют экстрактором) автоматически
переключается на исправную линию.
С помощью средств передачи данных 14 и телеграфной связи на Центр
управления поступает в цифровом виде плановая информация, а также
осуществляется автоматизированный обмен информацией с аэроузловой
АС УВД. Планы полетов передаются по четырем телеграфным каналам со
скоростью 50 бод на центр телеграфной связи.
243.
Структурная схема районной АС УВД «Теркас» показана на рисункеот смежных систем
1
3
4
5
10
11
14
12
13
16
17
6
19
7
2 (10 шт)
20
15
21
18
8
9
22
1 – радиолокационная подсистема; 2 – радиолокационная позиция; 3 – ПРЛ; 4 – ВРЛ; 5 –
АПОИ; 6 – модем подсистемы связи; 7 – АРП; 8 – модем передачи данных; 9 – ОВЧрадиостанция; 10 – Центр управления; 11 – подсистема связи и передачи данных; 12 –
аппаратура приема данных от радиолокационных позиций и смежных систем УВД; 13 –
кроссировочное устройство; 14 – средства передачи данных; 15 – средства записи переговоров;
16 – средства связи с ВС; 17 – средства внутренней и внешней оперативной телефонной связи;
18 – система единого времени; 19 – комплекс обработки информации; 20 – аппаратура
сопряжения; 21 – ЭВМ; 22 – комплекс отображении информации.
244.
Центр управления 10 связан с каждой РЛП двумя узкополосными линиями связис пропускной способностью по 2400 бит/с каждая.
Линии связи имеют встроенный канал обратнной связи с малой пропускной
способностью (75 бит/с). Он используется для контроля параметров линии и в
случае неисправности одной из линий выход АПОИ (комплект АПОИ также
называют экстрактором) автоматически переключается на исправную линию.
С помощью средств передачи данных 14 и телеграфной связи на Центр
управления поступает в цифровом виде плановая информация, а также
осуществляется автоматизированный обмен информацией с аэроузловой АС УВД.
Планы полетов передаются по четырем телеграфным каналам со скоростью 50 бод
на центр телеграфной связи.
от смежных систем
Средства связи с ВС делятся на ближние
16, которые размещаются на передающем и
приемном радиоцентрах, удаленных от
Центра управления на расстояние до 5 км,
и дальние 9, находящиеся, как правило, на
РЛП. Ближние радиостанции управляются
напрямую по проводным каналам, а
дальние – по стандартным телефонным
каналам связи.
1
3
4
5
10
11
14
12
13
16
17
6
7
2 (10 шт)
19 20
15
21
18
8
9
22
245.
Районная АС УВД взаимодействует «Теркас» с аэроузловой АС УВД.Аэроузловые АС УВД предназначены для обеспечения безопасности полетов и
повышения эффективности УВД в районе аэроузла, в состав которого входит
несколько аэродромов и ВП над ним. Непрерывный радиолокационный контроль в
районе аэроузла достигается одновременной работой нескольких РЛС, поэтому в
аэроузловых АС УВД большинство задач радиолокационной обработки аналогичны
тем задачам, которые решаются в трассовых (районных) АС УВД.
Особенности построения аэроузловых АС УВД рассмотрим на примере Московской
аэроузловой системы. Данная система решает следующие основные задачи:
• прием и обработку РЛИ, поступающей от всех РЛК, оснащенных ПРЛ и ВРЛ;
• объединение информации, поступающей от РЛК и формирование единой картины
ВО;
• автосопровождение до 100 ВС одновременно по данным ВРЛ и планов полетов;
• автоматизированную прием-передачу управления ВС;
• прием и обработку данных АРП с четырех позиций;
• автоматизированный обмен плановой и радиолокационной информацией с
трассовой АС УВД;
• буквенно-цифровое отображение радиолокационной и дополнительной информации
о ВС, а также вспомогательной динамической и статической графической
информации;
• прием-передачу сообщений с КДП четырех аэродромов, входящих в состав аэроузла.
246.
Эти задачи и определили структуру аэроузловой АС УВД «Теркас», показаннойна рисунке. Технические средства, входящие в состав аэроузловой АС УВД
аналогичны техническим средствам районной АС УВД «Теркас».
Характерной особенностью аэроузловой АС УВД является наличие в ней
комплексов отображения РЛИ и оконечных устройств для взаимодействия с
диспетчерами посадки, старта и руления, расположенных на аэродромах. Такое
построение системы УВД обеспечивает оперативное взаимодействие между
диспетчерами круга, расположенными в Центре управления, с диспетчерами
старта и посадки каждого аэродрома, соответственно, а также с диспетчерскими
пунктами аэродрома, непосредственно планирующими вылеты и посадки ВС.
Радиолокационная
позиция
Позиция
АРП
КДП
аэродрома
Центр
управления
Структурная схема аэроузловой АС УВД
247.
Районная АС УВД «Стрела».Представленный на рассмотрение Комиссии
Президиума Совета Министров СССР в
1974 году проект районной АС УВД,
которая получила название "Стрела",
одобрили и, позже, в 1978 году было
предложено
развернуть
в
стране
одиннадцать таких комплексов.
Ростовский центр АУВД "Стрела".
248.
Районная АС УВД «Стрела» предназначена для автоматизации процессапланирования и УВД в районах с интенсивным ВД. В ней предусмотрено решение
задач долгосрочного, суточного и текущего планирования, а также
непосредственного (оперативного) УВД. Структура АС УВД «Стрела» типовая. В ее
состав входят комплексы аппаратуры Центра управления, радиолокационные,
аппаратуры речевой связи, а также радиоцентры, автоматические радиопеленгаторы
и абонентские пункты.
Основы Центра управления составляют пять ЭВМ, по две из которых группируются
в вычислительные комплексы обработки радиолокационной и плановой
информации, а пятая ЭВМ является резервной. Информация с вычислительных
комплексов поступает на пульты диспетчеров секторов УВД и на группу пультов
технического обслуживания.
РЛП
обеспечивают
непрерывное
радиолокационное
поле
в
районе
функционирования системы с высоты 3000м, а вблизи мест базирования
радиолокационного комплекса и с меньших высот. Каждая позиция состоит из ПРЛ
и ВРЛ, информация с которых поступает на два комплекса комбинированной
аппаратуры первичной обработки информации, из АРП, используемого как
резервное средство опознавания ВС, и ОВЧ-радиостанций для связи с экипажами
ВС. Комплекты АПОИ функционируют независимо друг от друга, причем один
комплект рабочий, а второй – резервный. Сигналы с них и АРП через модемы
поступают в линии телефонной связи с Центром управления.
249.
Центр управления связан с каждой РЛП двумя узкополосными линиями связи(скорость передачи по каждой 2400 бит/с). В случае неисправности одной из линий
модем автоматически подключается к исправной линии. Для обеспечения связи и
передачи данных используется несколько приемо-передающих радиоцентров и
автоматизированных
абонентских пунктов аэропортов. Обеспечивается также
взаимодействие с соседними РЦ и диспетчерскими пунктами, ЗЦ и другими АС
УВД.
Средства внутренней и внешней оперативной телефонной связи служат для ведения
переговоров диспетчеров с абонентами. Средства магнитной записи дают
возможность записывать переговоры диспетчера по радиоканалам, каналам
внутренней и внешней связи с одновременной записью сигналов единого времени.
Система единого времени (СЕВ) выдает информацию о текущем времени на все
диспетчерские пункты и на средства магнитной записи.
Центр управления принимает информацию, поступающую с РЛП, проводит ее
вторичную обработку и объединяет данные от одних и тех же ВС, причем ввод а
автосопровождение возможен как вручную с использованием датчика
прямоугольных координат, так и автоматически на основе информации о планах
полетов. Автоматизирован также процесс приема и передачи управления
диспетчерами системных секторов, т.е. этот процесс осуществляется без ведения
специальных переговоров между диспетчерами.
250.
Одновременно с информацией о ВО Центр управления принимает и обрабатываетинформацию о планах полетов. Предусмотрено также документирование
информации, при котором возможно воссоздание картами ВО в прошлом в точно
указанное время. В систему также поступает метеоинформация от нескольких
метеорадиолокаторов и метеоданные о состоянии погоды на аэродромах, которые
используются для планирования и оперативного УВД,
Комплекс технических средств РЦ дает возможность организовать тренировку
диспетчеров одновременно с основным режимом работы. Для тренировки
используются находящиеся в резерве пульты управления и планирования полетов.
Предусмотрена возможность тренировки по данным реальной ВО и действующим
планам полета.
В АС УВД «Стрела» для предварительного (суточного) планирования полетов
разработаны специальные пульты организации потоков ВС. Этот процесс
позволяет также более эффективно использовать ВП, сглаживать пики в движении
ВС и исключать перегрузки в отдельных зонах управления.
251.
Комплекс средств автоматизации УВД «Трасса».Для районов со средней интенсивностью ВД разработана система «Трасса». Она
предназначена для приема, обработки, трансляции, объединения и отображения
информации о ВО, получаемой от четырех РЛП, одна из которых находится не далее
5км от центра. Система «Трасса» состоит из КСА РЛП и РЦ. Каждая РЛП оборудована
ПРЛ, ВРЛ, АПОИ, аппаратурой сопряжения и передачи данных. На каждой РЛП
дополнительно установлен АРП и радиостанции. КСА РЛП предназначен для
автоматического съема, первичной обработки и преобразования информации о ВО в
зоне действия позиции; автоматического приема информации, поступающей от АРП;
отождествления и объединения данных от ПРЛ, ВРЛ и АРП и передачи их в РЦ по
четырем телекодовым каналам связи; ретрансляции сигналов дистанционного
управления радиостанциями, развернутыми на РЛП.
КСА РЦ имеет групповую аппаратуру обработки информации и коллективные РМ
диспетчеров радиолокационного управления, диспетчера графической информации и
диспетчера-оператора. Групповая аппаратура принимает сообщения, поступающие по
телекодовым каналам от КСА РЛП и аналоговую информацию от РЛС, расположенной
вблизи центра. Затем информацию от РЛС отождествляют в зонах перекрытия
радиолокационных полей, исключают избыточность и строят мозаичное отображение
информации. Групповая аппаратура анализирует сообщения по каналу ВРЛ, устраняет
ложные сообщения, очищает от помех дополнительную информацию ВРЛ, используя
несколько источников.
252.
Предусмотрен автоматизированный ввод в автоматическое сопровождение до 15 ВС,не оборудованных ответчиками ВРЛ. Как только РЛИ обработана, групповая
аппаратура распределяет ее по секторам управления и направляет на индикаторы ВО
(ИВО) коллективных РМ диспетчеров.
Коллективное РМ диспетчера содержит два ИВО с панелями управления,
обеспечивающими независимое и идентичное управление изображениями, алфавитноцифровой дисплей с двумя видеоконтрольными устройствами, датчик прямоугольных
координат, планшет диспетчера для ведения графика «Время-путь», пульты
дистанционного управления радиостанциями, панели аппаратуры громкоговорящей и
телефонной связи.
ИВО диет возможность отображать информацию в синтетическом и аналого-цифровом
режимах, изменять масштаб изображения и смещать центр отображаемого района в
любую точку. На экране ИВО отображается карта-схема и до 850 знаков и символов,
рассчитанных на одновременное отображение на одном ИВО до 25 отметок от ВС и
формуляров к ним. Предусмотрены документирование видеоинформации и запись
переговоров.
КСА «Трасса» дешевле и проще трассовых АС УВД, она приспособлена к
использованию имеющихся сравнительно дешевых серийных РЛС, однако в ней
отсутствует автоматизация планирования, и нет метеообеспечения. Поэтому
применение системы «Трасса» существенно улучшает условия труда только
диспетчеров оперативного УВД.
253.
В 1974 г. в структуре МГА для осуществления научно-технического сопровождения ирешения задач, связанных с созданием, функционированием и развитием Системы был
создан научно-экспериментальный центр автоматизации УВД (НЭЦ АУВД), в составе
которого был образован военный сектор. По своему статусу НЭЦ АУВД являлся головным
научно-исследовательским институтом по проблемам управления воздушным движением, а
также разработки наземных средств навигации, посадки и связи. Особое место в работе
Центра занимали вопросы, связанные с автоматизацией процесса УВД.
Примером этого является внедрение в практику УВД районных автоматизированных систем
РАС УВД "Теркас" в Московском районе (1981г.), "Трасса" в Симферопольском районе
(1983г.) и "Стрела" в Ростовском районе (1991г.).
Автоматизированными системами типа "Трасса" и "Стрела" планировалось оснастить все
районы УВД страны со средней и высокой интенсивностью воздушного движения.
Анализ функционирования ЕС УВД СССР за весь период ее существования (до 1991г.)
показал, что по сравнению с 1973г. количество опасных сближений ВС различной
ведомственной принадлежности в зонах (районах) сократилось в 3,7 раза, число нарушений
порядка использования воздушного пространства снизилось более чем в 8 раз, а
среднесуточное время вводимых различного рода ограничений на использование
воздушного пространства уменьшилось в 4 раза.
Существенно улучшилось взаимодействие гражданских и военных органов УВД по
использованию воздушного пространства, что позволило повысить регулярность и
экономичность полетов ВС всех его пользователей.
254.
Так, в результате эффективного использования маршрутов спрямления воздушных трасс идополнительных (экономичных) эшелонов полетов, не включенных в Перечень ВТ СССР,
экономия топлива составила более 300 тыс. тонн в год. Значительно активизировались работы
по совершенствованию структуры воздушного пространства страны, в результате чего
протяженность воздушных трасс возросла более чем в 1,6 раза (с 215560 км до 345000 км),
более чем в 2 раза увеличилось количество маршрутов спрямления воздушных трасс, что
составило 9570 км, и почти в 2,5 раза - участков трасс (222720 км) с эшелонами до 12100 км.
Вместе с тем анализ изменения этих показателей в середине 80-х годов выявил тенденцию их
стабилизации.
Программа модернизации существенно недофинансируется. Несмотря на это, в
нашей стране все же разрабатываются новые технические средства автоматизации
процессов планирования ИВП и УВД. Так например, порядка 70% гражданских
секторов районных центров УВД оборудованы комплексами средств автоматизации
отображения воздушной обстановки типа "Альфа", "КАРМ-ДРУ", "Топаз-2000" и
"Коринф", используемые частично и для решения задач непосредственного УВД в
военных секторах, для которых разрабатывается и внедряется специализированный
комплекс малых средств автоматизации планирования и управления "Небосвод". В
ряду этих работ необходимо отметить также комплекс мероприятий, проводимых
Главным центром планирования потоков воздушного движения в интересах
автоматизации процессов использования воздушного пространства, а также расчета
и контроля поступления аэронавигационных сборов и т.п.
255.
СОВРЕМЕННЫЕ АС УВД.Рост интенсивности потоков ВС с одной стороны, а с другой – протяженность
территории и особенности географического положения России диктуют
необходимость укрупнения центров УВД и создание объединенных центров
управления полетами (ЦУП). При этом преследуются следующие цели:
• достижение мирового уровня безопасности полетов и соответствии с
рекомендациями ИКАО и концепцией CNS/ATM;
• обеспечение гибкости системы ОВД, позволяющей ей развиваться и адаптироваться
к изменяющимся условиям и потребностям пользователей ВП;
• повышение технико-экономической эффективности системы ОВД путем снижения
эксплуатационных расходов при повышении уровня безопасности УВД.
Поставленные цели достигаются за счет применение новых высоких информационных
технологий и современных технических средств связи, наблюдения и навигации. С их
помощью обеспечиваются высокая надежность и достоверность больших объемов
обрабатываемой и передаваемой информации. Все это приводит к уменьшению
загрузки диспетчеров, так как снижает риск несвоевременного обнаружения КС или
неправильного их разрешения.
В итоге открываются новые возможности совершенствования структуры ЕС ОрВД РФ,
сокращения количества РЦ (ВРЦ), уменьшения числа секторов управления и
упрощения их конфигурации.
256.
Создание объединенных ЦУП требует решения целого комплекса организационнотехнических проблем, наиболее важная из которых – обеспечение их новымисовременными средствами радиотехнического обеспечения полетов (РТОП) и
связи.
В качество источников информации о ВО, поступающей в ЦУП, должны
использоваться высокоинформативные современные сенсоры. К ним относятся:
первичные обзорные трассовые РЛС (ОРЛ-Т);
моноимпульсные ВРЛ;
АРП;
транспондеры системы АЗН.
Соответствующее количество РЛП и их взаимное расположение обеспечивают
необходимость перекрытия зоны наблюдения и мультисенсорную обработку
информации. Включение в состав РЛК первичных ОРЛ-Т позволяет существенно
повысить эксплуатационные характеристики и характеристики надежности
(непрерывность, безотказность, целостность, готовность и др.) при отказах
бортового РЭО (самолетных ответчиков и транспондеров АЗН), а также при
обслуживании ВС, необорудованных самолетными ответчиками.
257.
Фиксированная авиационная связь используется для передачи в ЦУП РЛИ и данных осостоянии и режимах работы средств РТОП, а также для посылки команд управления
на РЛП и для прямой речевой связи. Для этих целей используются арендованные
каналы связи и соединительные линии для подключения к магистральным линиям
связи, цифровые линии передачи данных и земные станции спутниковой связи.
При создании ЦУП возникает необходимость централизованного управления всеми
ОВЧ-приемопередатчиками, установленными на РЛП, и объединения их работы на
одной частоте для создания единого ОВЧ-поля. Для реализации этих потребителей
внедряются принципиально новые технические решения. К ним следует отнести
установку
на
РЛП
совместных
унифицированных
автоматизированных
приемопередающих центров со встроенными наземными комплексами передачи
данных.
Оборудование ЦУП разделяется на следующие сегменты:
• сегмент УВД;
• сегмент планирования полетов и ИВП.
Оборудование сегмента УВД включает серверы и АРМ диспетчеров (по числу
секторов управления и, кроме того, используются резервные АРМ), которые
объединены в локальные сети. Сюда же входят АРМ руководителей полетов (районов
и аэродромов), АРМ инженера и групповое оборудование, система речевой связи,
средства документирования, тренировочный модуль, вспомогательное оборудование
258.
Интерфейс осуществляется устройствами сопряжения с ЛПД, связывающимиЦУП с РЛП, и линиями связи с внешними источниками – потребителями
информации.
Сбор, обработка информации, ее преобразование, реализация функций поддержки
принятия решений и управление отображением выполняются подсистемами,
входящими в АС УВД, которая представляет собой вычислительное ядро
объединенного ЦУП.
Высокий уровень надежности и безопасности полетов обеспечивается сочетанием
ряда факторов. К ним относятся:
• высокая информативность источников информации и их рациональное
сочетание;
• совершенствование алгоритмов обработки данных;
• наглядное и качественное представление информации о ВО;
• организация помощи диспетчеру УВД в принятии решений.
259.
В Москве успешно завершились испытания нового ЦУП (декабрь 2016)Установка не имеет аналогов, и отвечает всем заявленным требованиям
международной организации по управлению полетами. С помощью нового ЦУП,
пропускная способность воздушного пространства над Москвой повысится вдвое.
260.
Росавиация и концерн «Алмаз-Антей» завершили испытания нового центрауправления полетами (ЦУП) в Москве
По данным издания, комиссия признала новую автоматизированную систему
организации воздушного движения над столицей «пригодной и готовой для
штатной эксплуатации».
ЦУП может начать работу в апреле 2017 года. К осени планируется ввести
новую схему движения самолетов над Москвой, которая вдвое повысит
пропускную способность.
261.
Введение нового ЦУП ожидалось еще в 2013 году, но его открытие постоянно откладывается.Последний ранее анонсированный срок - март 2017 года.
Нынешняя система организации воздушного движения была введена в 1981 году и
выработала свой ресурс. Как ранее сообщала газета "Коммерсант", в 2015-2016 годах было
четыре полных отказа системы, во время которых приходилось использовать установленную
в 2008 году резервную систему
Новый ЦУП (генподрядчиком выступает концерн "Алмаз-Антей") должен увеличить
пропускную способность воздушного пространства над Москвой, повысить безопасность
движения за счет большей автоматизации процессов и, следовательно, уменьшения нагрузки
на диспетчеров. В частности, новая система намного раньше предупреждает о конфликтах
гражданских самолетов, то есть о нарушениях эшелонирования,
Во время второго этапа приемки ЦУПа комиссия выявила различия между проектной и
исполнительной документацией", - отметил он. В данный момент несоответствия устранены.
При этом, по мнению комиссии, внесенные существенные изменения могут повлиять на
конструктивную надежность и безопасность объекта, в связи с этим документация будет
направлена в Главгосэкспертизу
Сейчас основной системой, управляющей воздушным движением, является шведская
"Теркас" - часть системы создавалась российскими специалистами. Она была введена в
эксплуатацию в 1981 году. Как ранее писала газета "Коммерсант", ее программно-аппаратное
решение рассчитано на 15 лет, ресурс исчерпан в 1996 году. Техника этой системы устарела,
есть проблемы с ее надежностью, с эксплуатацией - многие комплектующие уже не
производятся, отмечал в интервью ТАСС замгендиректора "Алмаз-Антея" Савицкий.
262.
263.
Современная автоматизированная система управления воздушным движениемсм сл.№162
К таким АС УВД относится, например, АС УВД «Альфа», которая включает:
комплекс средств автоматизации управления воздушным движением (КСА УВД) «Альфа3;5», который обеспечивает прием, обработку, отображение и интеграцию информации о воздушной
обстановке, плановой, метеорологической и аэронавигационной информации на дисплеях высокого
разрешения рабочих мест специалистов УВД;
комплекс средств передачи информации (КСПИ) «Ладога», предназначенный для сбора,
обработки и передачи данных от радиолокационных станций, радиопеленгаторов и
приемопередающих центров по каналам (линиям) связи в центры УВД, а также для обмена данными
между центрами УВД;
систему коммутации речевой связи (СКРС) «Мегафон», которая предназначена для
организации наземной громкоговорящей и телефонной связи, управления радиосвязью с
воздушными и наземными объектами;
комплекс средств автоматизации планирования воздушного движения (КСА ПВД)
«Планета», который решает задачи предварительного, суточного и текущего планирования
полетов, обеспечивает плановой и аэронавигационной информацией органы единой системы
организации воздушного движения, взаимодействующие автоматизированные системы УВД и ПВД;
программно-аппаратный комплекс (ПАК) «Консультант», предназначенный для решения
задач информационно-справочного обеспечения авиационного персонала и возможностей со-здания
единых электронных библиотек, обеспечивающих интеграцию существующих информационных
баз, а также создания корпоративных и персональных справочников;
комплексный диспетчерский тренажер (КДТ) «Эксперт», предназначенный для обучения и
тренировки диспетчерского состава в службах УВД и учебных заведениях гражданской авиации.
Кроме того, в состав АС УВД «Альфа» входит система точного времени «Метроном»,
магнитофон «Гранит», подсистема защиты информации «Сфера».
264.
ТИПОВАЯ АЭРОДРОМНО-РАЙОННАЯ АС УВДСовременные требования к АС УВД
В качестве базовой АС УВД целесообразно принять аэродромно-районную систему
(АРАС УВД), которая в зависимости от конкретных условий может быть
реконфигурирована как в районную, так и аэродромную систему. (АРАС УВД «Альфа» )
АРАС предназначена для обеспечения безопасности полетов, повышения регулярности и
экономичности полетов авиации различных ведомств в районе аэродрома, на воздушных трассах и
во внетрассовом ВП путем автоматизации текущего планирования, сбора, обработки и
отображения РЛИ (в перспективе информации, получаемой по каналам АЗН) и метеоинформации.
прием, обработка и отображение информации, в том числе радиолокационной,
радиопеленгационной, плановой, аэронавигационной, справочной и вспомогательной, а также
данных о техническом состоянии и режимах работы оборудования периферийных объектов и
каналов передачи данных;
передача информации внешним пользователям по каналам сети аэронавигационной службы
передачи данных;
обеспечение взаимодействия с периферийными объектами, со смежными АС и комплексами
УВД, метеорологическими комплексами и системами, а также объектами и системами
технологического взаимодействия органов ЕС ОрВД РФ (службы аэропортов, авиакомпании,
органы УВД района или аэроузла, органы УВД смежных зон или центров УВД и др.);
обеспечение обучения и тренировки диспетчерского состава;
осуществление контроля и управления техническим состоянием оборудования системы;
документирование и воспроизведение различных видов информации;
информационная поддержка расчетов по сборам за аэронавигационное обслуживание.
265.
Тактико-эксплуатационными требованиями и характеристиками типовой АРАСявляются следующие:
АРАС должна выполнять решение задач управления и обеспечения ВД в зонах
ответственности центра УВД, объем контролируемого ВП должен составлять по
высоте от 0 до 20000м, в плане – 2000х2000км;
должен быть непрерывный радиолокационный контроль за движением ВС в
пределах зон видимости РЛС;
должно быть обеспечено автоматическое сопровождение ВС в пределах зон
обзора РЛК по данным, поступающим от АПОИ, ПРЛ, ВРЛ, ПРЛ+ВРЛ (режимы
УВД и RBS), а также должна осуществляться экстраполяция движения ВС;
максимальное количество сообщений о целях (отметках), получаемых за
период обновления информации от всех РЛК, должно быть не менее 1000;
максимальное количество одновременно сопровождаемых третичных треков
ВС по сигналам ПРЛ, ВРЛ, ПРЛ+ВРЛ должно быть не менее 300;
прием, хранение, обработка планов ВД и отдельных формализованных
сообщений о плановой информации должно осуществляться по стандартам ИКАО
и РФ;
должно быть предусмотрено управление командной и внутрипортовой
радиосвязью, средствами обеспечения речевой телефонной связью и
взаимодействие с внешними сетями и системами речевой связи;
266.
должно быть обеспечено взаимодействие с объектами ЦКС сетиаэронавигационной информации, ЦКС сети АС передачи данных смежных
АС и с комплексами УВД и АС ПВД ЗЦ (ПВД ГЦ);
должна быть обеспечена синхронизации всех систем и оборудования, а
также внешних потребителей в рамках СЕВ с погрешностью на более
0,01с.;
должна быть организована передача информации и данных с
радиолокационных и радиопеленгаторных позиций, от радиосвязных
приемопередающих центров по каналам (линиям) связи (радиоканалы,
физические линии, магистральные каналы связи и др.) в центр УВД, а
также обеспечен обмен данными между центрами УВД в многоканальном
режиме;
уровень надежности оборудования, входящего с состав АРАС,
определяемый наработкой до отказа, должен быть не менее 6000ч., а
коэффициент готовности должен быть не менее 0,9999;
должна быть предусмотрена возможность наращивания системы и ее
сопряжения с системами АЗН и с цифровыми ЛПД;
в АРАС, как в открытой системе, должна обеспечиваться возможности
корректировки и отладки параметров подсистемы планирования,
настраиваемых параметров картографической информации при ее
адаптации к конкретной зоне УВД, а также в процессе эксплуатации.
267.
Структура и состав системы.Структуру АС рассмотрим на примере АРАС УВД «Альфа»
В состав типовой АРАС УВД входят следующие подсистемы:
подсистема обработки и отображения информации – КСА УВД «Альфа» (не
путать со всей АС УВД «Альфа»);
подсистема связи и передачи данных при взаимодействии с источниками
информации и системными (периферийными) системами и центрами УВД –
комплекс средств передачи речевой и управляющей информации УВД с РЛП,
радиосвязных приемо-передающих центров по наземным каналам связи в РЦ,
АС УВД «Ладога»;
подсистема обеспечения метеорологической информацией;
подсистема обработки плановой и аэронавигационной информации, или КСА
ПВД «Планета»;
подсистема синхронизации – система точного времени «Метроном»;
система коммутации речевой связи «Мегафон» (не путать с оператором сотовой
связи);
подсистема документирования радиолокационной, речевой информации и
данных об ИВП – магнитофон «Гранит»;
подсистема обучения и тренировки специалистов УВД – комплексный
диспетчерский тренажер «Эксперт»;
пультовое оборудование для организации АРМ специалистов УВД и
технического персонала на базе универсальных пультов серии «Пульт-А».
268.
Подсистема связи ипередачи данных
Подсистема
обработки
плановой и
аэронавигационной
информации
Система
коммутации
речевой связи
Подсистема обработки и
отображения информации
Подсистема
документирования
радиолокационной
и речевой
информации
Подсистема обеспечения
метеорологической
информацией
Подсистема
диагностики и
технологического
управления
Пультовое
оборудование
Подсистема
отображения
справочной и
вспомогательной
информации
Подсистема
обучения и
тренировки
Структура типовой АРАС УВД.
В перспективную АРАС может входить также подсистема АЗН в радиовещательном
диапазоне (АЗН-В), включая транспондер и ЛПД режима 4 (VDL-4).
Конструкция системы сделана так, что позволяет наращивать количество других источников
информации (в том числе пространственно удаленных), таких как трассовые и аэродромные РЛК,
первичные ОРЛ-Т, ВРЛ, ПРЛ и АРП, и имеет модульную структуру. Аппаратная часть модулей,
составляющих АРАС, выполнена на основе стандартных вычислительных средств, средств
отображения, систем бесперебойного питания, устройство ввода-вывода, сетевого и
коммуникационного оборудования массового промышленного производства.
269.
АС УВД «Альфа» 5270.
АРАС обеспечивается аппаратурой технического управления и эффективнымисредствами контроля работоспособности модулей и элементов переключения с
отказавших функциональных элементов на резервные. Тестовый аппаратурный
контроль и диагностика охватывают все технические устройства.
В АРАС, как в ИВС сетевого типа, постоянная информация и программное
обеспечение комплексов и подсистем защищены от несанкционированного
доступа. При передаче информации используются средства для защиты от ошибок.
Функционирование АРАС в целом, а также ее комплексов и технических средств
защищено от возможных ошибочных действий операторов.
Комплекс «Ладога».
Комплекс «Ладога» предназначен для сбора, преобразования и передачи данных от
РЛС, АРП и приемо-передающих центров по каналам (линиям) связи в центры
УВД, а также для обмена данными между центрами УВД,
Аппаратура комплекса обеспечивает выполнение следующих задач:
• сбор данных от соответствующих источников;
• обработку данных, их кодирование и декодирование;
• сопряжение с каналами (линиями связи);
• передачу данных по каналам (линиям) связи;
• выдачу данных потребителям.
271.
ПРИЕМ, ПЕРЕДАЧА И ОБМЕН ИНФОРМАЦИЕЙ ИДАННЫМИ
(НА БАЗЕ КСПИ "ЛАДОГА")
«Ладога».
•организация внутрисистемной связи и обмена
данными между разнесенными фрагментами и
подсистемами АРАС;
•трансляция информации (УВД, RBS, А, С, S) от
радиолокационных позиций;
•трансляция радиопеленгационной (от АРП) и
метеорологической ( от МРЛ) информации;
•трансляция речевой информации громкоговорящей
(ГГС) и радиотелефонной связи от различных
объектов;
•управление удаленными радиостанциями, включая от
АППЦ;
•трансляция сигналов технического управления и
контроля удаленных объектов РТО;
•организация обмена данными со смежными
комплексами и системами.
272.
Комплекс «Ладога-ИС» в части обработки цифровой радиолокационнойинформации обеспечивает:
• траекторную обработку радиолокационной информации от каждого источника
(канала) с возможностью оперативной выдачи потребителю информации плотов
и/или треков;
• мультирадарную (мультисенсорную) обработку координатной информации при
ограничениях на возможную динамику полета ВС.
Комплекс обеспечивает как выдачу данных в местные системы ОВД, так и передачу
на удаленные центры ОВД, а также обеспечивает интеграцию разнесенных систем
ОВД
и
организацию
обмена
данными
между
центрами
ОВД.
КСПИ "Ладога" рекомендован Министерством транспорта РФ для оснащения
предприятий гражданской авиации.
Система эксплуатируется более
чем в 90 центрах ОВД и
аэропортах ГА.
«Ладога».
273.
274.
Комплекс в полной конфигурации обеспечивает передачу оцифрованных данныхот следующих источников радиолокационной и радиопеленгационной
информации:
• первичных трассовых РЛС;
• вторичных трассовых РЛС;
• первичных и вторичных каналов аэродромных РЛС;
• посадочных РЛ;
• комплексов радиотехнических систем посадки:
АРП;
транспондеров системы АЗН.
Для радиолокационной и радиопеленгационной информации обеспечивается
стыковка с системами отображении информации и КСА УВД, имеющими
стандартные
интерфейсы
ЛВС
Ethernet
и/или
последовательные
коммуникационные порты RS-232.
Для передачи речевой информации комплекс обладает возможностью сопряжения
с цифровыми системами речевой связи, имеющими стандартный интерфейс ЛВС
Ethernet и/или последовательные коммуникационные порты RS-232.
Комплекс позволяет передавать и принимать данные цифровых систем управления
удаленными радиолокационными, радиопеленгационными и радиосвязными
позициями, если там предусмотрено стандартное интерфейсное оборудование.
275.
При передаче данных комплекс позволяет обеспечить:• непрерывную и круглосуточную передачу/прием данных;
• одновременную передачу/прием данных от нескольких источников;
• передачу/прием данных по нескольким каналам (линиям) связи и работу в режиме
избыточности (резервирования) каналов (линий) связи;
• различные режимы передачи данных, также как постоянная передача в одну сторону
(симплексный режим) и постоянная передача в обе сторону (дуплексный режим).
В каждом из вариантов исполнения в состав комплекса входят по два комплекта
аппаратуры: передающий и приемный. Комплекты аппаратуры устанавливаются на
противоположных концах линии (линий) передачи данных и сопрягаются с источниками
и потребителями информации, соответственно.
В каждом из комплектов входят две станции приема/передачи данных (серверы
сопряжения с источниками информации или серверы сопряжения с потребителями
информации): основная и резервная.
В свою очередь в состав каждой станции входит следующее оборудование:
процессорный модуль (аппаратура обработки и кодирования данных);
интерфейсные устройства;
аппаратура сопряжения с источниками или с потребителями информации;
аппаратура сопряжения с каналом (линией) связи;
комплект коммутационного оборудования и кабелей;
источник бесперебойного электропитания.
276.
Основной частью станции является процессорный модуль, представляющий собойЭВМ – совместимый персональный компьютер. В корпусе процессорного модуля,
как правило, размещаются блоки сопряжения с источниками радиолокационной
информации, аппаратура сопряжения с потребителями информации (платы ЛВС,
адаптеры
последовательных
коммуникационных
портов
и
т.д.)
и
специализированные устройства сопряжения с каналами (линиями) связи.
В тех случаях, когда необходимо обеспечить передачу потока данных при
повышенных требованиях к полосе пропускания по сравнению с теми, которые
можно удовлетворить с помощью одного канала (линии) связи, в состав комплекса
включается аппаратура мультиплексирования, с помощью которой поток данных
распределяется по имеющимся каналам связи.
Подсистема обеспечения метеорологической информацией.
Подсистема обеспечения метеорологической информацией выполняет следующие
задачи:
взаимодействует
с
соответствующими
метеослужбами
по
протоколу
функционального взаимодействия;
получает метеорологические сообщения о фактической и прогнозируемой погоде,
штормовые предупреждения по аэродромам зоны ответственности АС УВД, трассам,
маршрутам и площадям, преобразует формат и передает метеорологическую
информацию в объеме, предусмотренном протоколом информационного обмена в АС
УВД;
277.
получает сообщения от автоматизированных метеорологических радиолокационныхкомплексов и данные о контурах зон, опасных для выполнения полетов (грозовой фронт,
сильный боковой ветер, пылевая буря и т.д.);
принимает сообщения о прогнозируемой силе ветра и температуре на эшелонах
полета;
принимает информацию о планируемых запусках радиозондов и данные по
расчетным траекториям их перемещения.
Датчиками метеоинформации являются:
приборное
оборудование
метеостанций,
Информация от
замеряющее
метеорологические
элементы
метеорадиолокаторов и
(температуру,
атмосферное
давление,
других источников
влажность, направление и скорость ветра и т.д.);
метеоинформации поступает
метеорологические радиозонды;
в систему УВД по цифровым
метеорологические ИСЗ;
каналам передачи данных
метеорологические радиолокаторы.
В частности, метеорологические радиолокаторы позволяют решать такие
задачи, как обнаружение атмосферных образований, оценивание их границ и
проведение классификации; оценивание высоты и толщины слоя облачности и
распределение облачности по высотам; оценка количественных характеристик
атмосферных образований, в том числе градовых очагов и интенсивности
осадков; определение направления и скорости перемещения облачности. Это
позволяет оценить состояние атмосферы в ВП и сделать прогноз его развития.
278.
Комплекс «Метроном».Оперативное УВД является задачей, которая решается в масштабе реального
времени. Практически все процедуры УВД фиксированы во времени и требование
синхронизации действий смежных центров УВД, служб одного центра УВД и
отдельных диспетчеров приводит к необходимости привязки всех средств и
участников процессов УВД к единой шкале времени. Все АРМ современной АС УВД
должны быть синхронизированы как между собой, так и с системами планирования,
регистрации, связи с другими комплексами аэродромного оборудования, а также с
АС других центров УВД
задача синхронизации системного времени
(любой системы) с общемировым решается с
помощью специально выделенного отдельного
компьютера,
называемым
временным
сервером. По нему, в свою очередь,
синхронизируются все другие компьютеры
системы. Как правило, каналом такой
синхронизации служит определенная ЛВС,
однако возможна связь и по другим
интерфейсам. Для повышения надежности
временной сервер и каналы связи с ним
потребителей его сигналов дублируются.
«Метроном».
279.
СИСТЕМА ТОЧНОГО ВРЕМЕНИ “МЕТРОНОМ”280.
Система точного времени "МЕТРОНОМ" предназначена для обеспечения единого времениоборудования систем ОВД, других цифровых систем и комплексов и их синхронизации с
высокой точностью.
ОБЛАСТИ ПРИМЕНЕНИЯ
•в качестве подсистемы синхронизации в АРАС УВД "АЛЬФА";
•как система единого времени в аэропортах ГА.
Потребителями системы являются:
•центральные ЭВМ локальных сетей, функционирующие под управлением Windows, UNIX,
Novel;
автономные ПЭВМ;
•цифровые часы рабочих мест, имеющие интерфейс с ПЭВМ;
•цифровые табло, управляемые ПЭВМ.
СОСТАВ
базовая хронометрическая станция (БХС);
•приемник сигналов спутниковых радионавигационных систем (СРНС) GPS/ГЛОНАСС;
•приемник сигналов времени от широковещательных ДКМВ радиостанций (опция);
•блок внешних интерфейсов (для подключения потребителей);
•цифровые часы для рабочих мест (опция);
•табло-часы для залов (опция)
Эксплуатируется в составе АРАС УВД "АЛЬФА" Магаданского центра ОрВД, АКТС-М3
Ростовского автоматизированного центра ОрВД, а также в составе АКТС УВД
Сыктывкарского РЦ ЕС ОрВД.
281.
Основной проблемой для построения СЕВ в АС УВД является синхронизациявременного сервера с мировым временем. Ранее для решения этой задачи выделялись
специальные радиоканалы, по которым постоянно транслировались сигналы точного
времени. Для синхронизации времени по сигналам точного времени выпускалась
специальная аппаратура подстройки местного времени под мировое время. Такая
подстройка производилась автоматически. Однако с введением в эксплуатацию
спутниковых навигационных систем GPS и ГЛОНАСС появился альтернативный
канал синхронизации времени по радиосигналам.
Это связано с тем, что принцип действия дальномерной спутниковой навигационной
системы предполагает рассылку сигналов точного времени, по задержкам которых
определяется псевдодальность от потребителя до навигационных спутников. Затем
процессор приемника спутниковой навигационной системы вычислят по
псевдодальностям координаты и, получив истинные дальности, учитывает задержку
при распространении сигнала от спутника до приемника, получая, таким образом,
привязку по времени очень высокой точностью ( 200нс ).
Этот процесс значительно упрощается, а точность повышается, если временной
сервер установлен стационарно, когда его координаты считаются точно известными и
неизменными. Тогда задержка сигнала вычисляется сразу же по получении сигнала от
спутника и немедленно учитывается без внесения погрешности из-за неточного
определения координат приемника. Именно этот принцип обеспечения
синхронизации реализован в системе «Метроном», входящей в состав АС УВД
«Альфа».
282.
Процесс синхронизации временного сервера по даннымприемника спутниковой радионавигационной системы (СРНС).
Внешний интерфейс СРНС-приемника, как правило, включает последовательный
порт для выдачи цифровой информации и специальный выход секундных меток
времени, обычно обозначаемых 1PPS. Для целей синхронизации аппаратуры
отображения достаточно использовать временные пакеты, получаемые по
последовательному порту. При этом можно добиться точности 0,1 с, что вполне
достаточно для синхронизации человеко-машинного интерфейса. Для синхронизации
же процессов в высокоскоростной аппаратуре, такой как, например, каналы связи с
временным разделением доступа необходимо привязывать начало секундного
дискрета к моменту нарастания фронта сигнала 1PPS.
Процесс синхронизации временного сервера состоит в непрерывной проверке
расхождения его внутренних часов и мирового времени и их корректировке так, чтобы
это расхождение не превышало некоторой наперед заданной величины
которую будем называть точностью синхронизации. Численное значение этой
величины зависит от того, какая точность требуется в синхронизируемой аппаратуре.
Полагая стабильность внутреннего таймера временного сервера равной
что
является типичным значением для современных кварцевых автогенераторов без
термостабилизации, получим, что для обеспечения точности синхронизации
часы сервера достаточно проверять один раз в 20 минут. Это следует из того, что в
течение одного часа уход по времени кварцевого автогенератора составит
283.
Соответственно, уход на 0,1с. будет происходить примерно в три раза реже, т.е. за20 минут. Однако СРНС-приемник предоставляет возможность делать такую
проверку гораздо чаще, а именно раз в секунду, что позволяет с помощью
обычных
кварцевых
автогенераторов
(не
термостабилизированных),
используемых в типовых компьютерах, получить точность синхронизации не хуже
Это получается из пропорции: за 1200с. (20 мин.) уход времени составляет
0,12с., а за 1с. уход составит .
Если необходимо хранить время в большей точностью, то можно использовать
специальные стандарты частоты, например, атомные. Таким образом,
программное обеспечение временного сервера проверяет внутренние часы так
часто, чтобы не допустить их ухода от мирового времени более, чем на
Для надежности в качестве предельного отклонения, по достижении которого
часы необходимо корректировать, принимают значение
Если обнаруживается отклонение времени, превышающее
значение ускоряют
или замедляют ход внутренних часов, чтобы свести временное отклонение к
нулю, а далее восстанавливают нормальный ход внутренних часов. Вся процедура
выполняется плавно во времени без перескоков.
284.
Шкала времени, поддерживаема СРНС-приемником зависит от используемойсистемы ИСЗ. Если это система GPS, то время выдается в шкале ИТС US, при
работе же по системе ГЛОНАСС поддерживается шкала ИТС RU. Разность хода
этих шкал обычно известна и при высокоточной синхронизации должна быть
учтена.
В результате шкала времени, поддерживаемая временным
синхронизируется с мировым, т.е. гринвичским временем.
сервером,
Далее временной сервер АС УВД «Альфа» осуществляет синхронизацию времени
рабочих станций, объединенных одной локальной сетью. Это обеспечивается
передачей широковещательных тестовых пакетов, которые наряду с информацией о
работоспособности той или иной рабочей станции содержат информацию о
времени отправки пакета. Время отправки пакета записывается в формате
системного времени соответствующей операционной системы и представляет
собой счетчик 100 наносекундных интервалов, прошедших с некоторого начального
момента, который выбирается в силу ряда причин
285.
Механизм синхронизации времени заключается в следующем. В конфигурациикаждой рабочей станции прописывается последовательный список имен серверов
точного времени, последовательность в списке определяет приоритетность
сервера, т.е. чем ближе к заголовку, тем выше приоритет. Данный список у всех
рабочих станций системы должен быть идентичным. После включения рабочей
станции и загрузки операционной системы на вход сетевого интерфейса начинают
поступать тестовые пакеты с других станций. Имя отправителя очередного
тестового пакета сравнивается со списком серверов точного времени, и в случае
совпадения определяется приоритет сервера и принимается решение о
необходимости коррекции времени.
Коррекция осуществляется в том случае если полученное точное врем отличается
от внутреннего времени станции более, чем на ( 2 )
Период отправления тестовых пакетов устанавливается опциально в пределах от 1
до 10с. (по умолчанию интервал устанавливается равным 3с.).
286.
Общие сведенияНазначение
Система коммутации речевой связи (СКРС) «Мегафон» представляет собой полностью цифровую
децентрализованную наращиваемую систему голосовой связи.
Система предназначена для организации наземной громкоговорящей и телефонной связи, управления
радиосвязью с воздушными и наземными объектами.
Система коммутации речевой связи (СКРС) «Мегафон» предназначена для обеспечения
взаимодействия диспетчеров и других специалистов центра УВД между собой, а также сопряжение по
звуковому сигналу и интерфейсу с имеющимися на объекте средствами связи (радиоканалами, ГГС,
системами связи с удаленными центрами управления и т. д.).
287.
ТерминологияРежимы связи
Дуплексная связь: двунаправленная связь, при которой оба абонента могут одновременно работать на передачу и на прием. Сеанс
связи устанавливается и разрывается один раз по инициативе любого абонента.
Пример - телефонная связь.
Симплексная связь: однонаправленная связь, при которой один абонент передает, а другой принимает. Сеанс связи
устанавливается и разрывается при каждой передаче по инициативе передающего абонента.
Пример - радиосвязь.
Полудуплексная связь: двунаправленная связь, при которой абоненты могут работать на передачу по очереди. Сеанс связи
устанавливается и разрывается один раз по инициативе любого абонента.
Пример - связь по каналам избирательного вызова (ИВА).
Соединение: текущий сеанс связи.
Вызов: запрос на установление соединения. Для абонентов разного типа вызов отрабатывается по-разному. Например, для
абонентов прямого оперативного доступа соединение устанавливается автоматически.
Дополнительные функции телефонной связи
Переадресация: переключение установленной связи или входящего вызова одним из абонентов на другого абонента.
Постоянная переадресация: режим, при котором все вызовы, приходящие на данное рабочее место автоматически
переадресуются на другое, заранее указанное рабочее место.
Циркуляр: связь, при которой один участник может говорить (инициатор циркуляра), а остальные могут слышать только его.
Конференция: соединение нескольких абонентов, при котором все участники конференции имеют возможность одновременно
говорить и слышать друг друга.
Удержание: режим, при котором абонент временно «отключается» без разрыва соединения.
Пример - Предположим, установлена связь абонента 1 с абонентом 2. В это время абонента 1 вызывает абонент 3. Абонент 1
переключает абонента 1 в режим удержания и связывается с абонентом 3. По окончании связи 1 – 3 абонент 1 переключает
абонента 2 в обычный режим и продолжает связь 1 – 2. На время удержания у абонентов 1 и 2 работает соответствующая
сигнализация.
Вторжение: вхождение в связь с абонентом, занятым другой связью.
Пример - Предположим, установлена связь абонента 1 с абонентом 2. Абонент 3 включает режим вторжения и вызывает абонента
1 голосом. Связь 1 – 2 при этом не разрывается.
Подбор вызова: ответ на вызов, приходящий на другое рабочее место.
Пример - Предположим, абонент 1 вызывает абонента 2 прямо или косвенно. Абонент 2 на вызов не отвечает. Абонент 3, услышав
звуковой сигнал вызова абонента 2, включает режим подбора и входит в связь с абонентом 1.
288.
Типы доступаПрямой оперативный доступ: соединение устанавливается сразу после нажатия адресной клавиши абонента. Вызов
осуществляется голосом.
Прямой доступ: при нажатии адресной клавиши абонент получает сигнал вызова. Связь возможна только после ответа абонента.
Прямой оперативный и прямой типы доступа с конкретного рабочего места возможны только к абонентам, для которых
предусмотрены адресные клавиши.
Косвенный доступ: абонент вызывается путем набора номера и нажатия клавиши «Вызов». Связь возможна после ответа
абонента.
Косвенный доступ возможен к любому внутреннему, а также внешнему абоненту СКРС, если аппаратура внешнего абонента
поддерживает данный режим.
Абоненты могут иметь различные типы доступа по отношению друг к другу. Например, возможна ситуация, когда абонент 1 может
вызывать абонента 2 только косвенно, а абонент 2 может вызывать абонента 1 прямо или оперативно.
Управление радиосвязью
Взятие радиоканала на управление: включение радиоканала в режим «Управление». Передача по радиоканалу возможна только
в этом режиме.
Канал прослушивания: радиоканал, работающий только на приём. Существуют каналы прослушивания, по которым передача
невозможна в принципе, например АТИС. Также каналом прослушивания становится обычный радиоканал, снятый с управления.
Доступный радиоканал: радиоканал, который может прослушиваться и управляться с данного рабочего места. Количество
доступных радиоканалов может превышать количество клавиш радиосвязи на сенсорной панели. Для любого из доступных
радиоканалов пользователем может быть назначена свободная клавиша.
Выбор наилучшего приемника: режим работы с радиостанциями, объединенными в группу по частоте. При наличии на входах
сигналов от нескольких приемников, автоматически выбирается (транслируется на громкоговоритель) наилучший сигнал. Данная
функция позволяет избежать наложения, ухудшающего разборчивость сигнала.
Автоматический выбор передатчика: режим, в котором из группы радиостанций, объединенных по частоте, на передачу
автоматически выбирается та, приемник которой был до этого определен как наилучший.
SELCAL: режим селективного вызова по радиосвязи.
289.
Перечень сокращенийAGP
COM
HSS
PCI
TDM
БВИ
БИ
БГ
БМ
БП
БПИ
БЭР
ВС
ГГС
ГО
ИБП
ИО
ЛВС
МВВ
МВИ
МПМ
ОРМ
ОСПД
ОУРМ
ПБ
ПО
СЛ
СМ
СТКУ
УВД
УКК
- Accelerated Graphics Port, стандарт шины для видеоадаптера
- последовательный порт
- High Speed Serial, высокоскоростной последовательный порт
- Periferial Components Interconnect, стандарт локальной шины
- Time-Division Multiplexed, протокол обмена
- блок внешних интерфейсов
- блок интерфейсов
- блок гарнитурный
- блок микрофонный
- блок питания
- блок пультовых интерфейсов
- блок электрический распределительный
- воздушное судно
- громкоговорящая связь
- групповое оборудование
- источник бесперебойного питания
- интерфейсное оборудование
- локальная вычислительная сеть
- модуль ввода-вывода
- модуль внешнего интерфейса
- микропроцессорный модуль
- оборудование рабочего места
- оборудование среды передачи данных
- оборудование удаленного рабочего места
- процессорный блок
- программное обеспечение
- соединительные линии
- сенсорный монитор
- система технического контроля и управления
- управление воздушным движением
- устройство кроссировки и коммутации
290.
НазначениеОписание и работа
СРСК «Мегафон» обеспечивает диспетчерскому
техническому персоналу следующие виды связи:
и
административно-
•двухстороннюю радиосвязь в диапазонах ОВЧ и УВЧ между диспетчерами
центра ЕС УВД и экипажами воздушных судов и двухстороннюю радиосвязь
"земля-земля" с неподвижными и подвижными и объектами;
• прослушивание радиообмена смежных диспетчерских пунктов и радиоканалов
(например, "ВОЛМЕТ" и "АТИС") на рабочих местах диспетчеров УВД;
•внутрицентровую телефонную (громкоговорящую) связь диспетчеров центра ЕС
УВД, а также технического персонала, обслуживающего систему;
•внешнюю телефонную (громкоговорящую) связь диспетчеров и технического
персонала центра ЕС УВД с абонентами аэропорта базирования (по кабельным
физическим линиям);
•внешнюю телефонную (громкоговорящую) связь с удаленными объектами
взаимодействия центра ЕС УВД (смежные районные центры, диспетчерские
пункты подхода, аэропорты и аэродромы зоны и т.п.), (по арендованным
междугородним каналам связи);
•неоперативную телефонную связь через коммутационное оборудование
системы речевой связи с абонентами системы, к которым не имеется прямого
доступа;
•вывод речевой информации для регистрации на внешнем оборудовании
документирования.
291.
СКРС «Мегафон»обеспечивает речевое взаимодействие диспетчеров УВД в
следующих режимах работы:
• режим радиосвязи для обеспечения речевого взаимодействия диспетчеров с УВД с экипажами ВС через
существующие радиостанции;
• режим оперативной телефонной связи для обеспечения речевого взаимодействия диспетчеров центра УВД
между собой;
• режим неоперативной телефонной связи для обеспечения речевого взаимодействия диспетчеров УВД
между собой, а также с внешними абонентами, использующими оборудование существующих сетей связи.
В любом из режимов работы система обеспечивает:
•управление связью с помощью сенсорного монитора;
•возможность оперативного выбора режима работы путем нажатия кнопки на сенсорном мониторе;
•вхождение в связь в любом из режимов путем нажатия кнопки на сенсорном мониторе;
• ведение переговоров в микротелефонном (гарнитура) и громкоговорящем (микрофон и динамический
громкоговоритель) режимах;
•возможность выбора на прослушивание одновременно нескольких каналов с раздельной регулировкой
громкости;
•визуальную индикацию режимов работы и текущих соединений на сенсорном мониторе.
При работе диспетчера по радиоканалам система обеспечивает:
•двустороннюю симплексную радиосвязь диспетчеров центра УВД с экипажами ВС с использованием штатных
радиостанций;
•возможность выбора на управление любого из подключенных к системе радиоканалов;
•прослушивание радиоканалов "ВОЛМЕТ", "АТИС" и др.
В режиме телефонной связи система обеспечивает:
•оперативную связь диспетчеров центра УВД между собой;
•возможность вхождения в связь методом оперативного, прямого и косвенного доступа;
•визуальную и звуковую индикацию вызова абонента;
•возможность передачи циркулярных сообщений;
•возможность использования дополнительных режимов управления связью: постоянная и одиночная
переадресация, удержание, и прочие.
292.
Характеристики (свойства)Функциональные характеристики
В части реализации функций радиосвязи СКРС «Мегафон» обеспечивает:
• доступ к любому радиоинтерфейсу с любого рабочего места;
• возможность выбора до 12-ти радиоканалов в режим «Управление» или «Прослушивание» из
общего числа доступных для данного рабочего места;
• групповой доступ к радиоканалу на приоритетной основе;
• выбор основного/резервного приемника/передатчика через функциональные клавиши на
сенсорном экране;
• включение передатчика на излучение адресной клавишей на сенсорном экране, клавишей
«тангента» или ножной педалью «тангента»;
• возможность одновременной передачи по всем радиоканалам, выбранным в режим “Управление”;
• возможность назначения отдельных динамиков для прослушивания радиоканалов;
• возможность индивидуального задания громкости при микшировании нескольких радиостанций на
одном громкоговорителе или наушнике;
• отображение выбранных радиоканалов и наличия принимаемого сигнала на адресных клавишах и
ЖКИ-индикаторах громкоговорителей;
• объединение нескольких радиоканалов, работающих на одной частоте, в группу (режим со сдвигом
несущих);
• выбор лучшего сигнала от нескольких приемников в группе;
• автоматический выбор передатчика в группе по лучшему сигналу;
• частотный интерком;
• ретрансляция сигнала с одной частоты на другую;
• посылка сигнала адресного вызова по радиоканалу (SELCAL).
293.
В части реализации функций телефонной связи СКРС «Мегафон» обеспечивает:симплексную и дуплексную связь между абонентами, избирательный, групповой неизбирательный вызовы,
конференция;
доступ к любому абоненту с любого рабочего места;
оперативный (через адресную клавишу), прямой (через адресную клавишу, с подтверждением вызываемого) и
косвенный (через номеронабиратель) доступ к абоненту;
наличие очереди входящих вызовов с возможностью выборочного ответа на вызовы;
организацию конференции как по заранее запрограммированному списку, так и путем произвольного набора
участников;
возможность удержания вызова на линии для соединения с другим абонентом радио или телефонной связи;
возможность переадресации входящего вызова к другому абоненту;
возможность автоматического перевода всех входящих вызовов на другое рабочее место;
возможность прерывания текущего соединения для установления более приоритетного;
возможность перехвата одним абонентом входящего вызова, адресованного другому абоненту;
возможность прослушивания переговоров с одного рабочего места на другом;
краткосрочное документирование переговоров.
СКРС «Мегафон» предоставляет интегрированное управление радио, громкоговорящей и телефонной
связью с одного сенсорного экрана. При этом обеспечивается:
•возможность оперативного выбора режима работы путем нажатия кнопки на сенсорном экране;
•вхождение в связь в любом из режимов путем нажатия кнопки на сенсорном экране;
•ведение переговоров в микротелефонном (гарнитура) и громкоговорящем (микрофон и динамический
громкоговоритель) режимах;
•возможность выбора на прослушивание одновременно нескольких каналов с раздельной регулировкой громкости;
•визуальную индикацию режимов работы и текущих соединений на сенсорном мониторе.
СКРС «Мегафон» обеспечивает интерфейсы для документирования на аналоговых и цифровых
магнитофонах.
294.
Технические характеристикиСистема имеет следующие характеристики по времени установления соединений:
Качество связи
ГОСТ 16600-72.
и
речевая
разборчивость
речи
в
режиме
ГГС
не
ниже
1
кл.
по
Адресная емкость системы:
•по телефонной связи – до 1024;
•по подключаемым радиостанциям – до 255 пар основная/резервная;
•количество радиоканалов, доступных для одновременного выбора на рабочем месте – до 12-ти.
•Аппаратура системы обеспечивает следующие характеристики:
•полосу частот в диапазоне 300-3400 Гц;
•нелинейность частотной характеристики не более +/- 3 дБ;
•качество связи и речевая разборчивость речи в режиме ГГС не ниже 95%;
•переходное затухание между несвязанными разговорными цепями не менее 70 дБ.
Для преобразования аналого-речевого сигнала в цифровую форму и трансляции его по внутренним
магистралям в системе использован метод импульсно-кодовой модуляции (ИКМ, закон А) в
соответствии со стандартом МСЭ-Т (МККТТ) серии G (G.703).
Время полной загрузки системы после включения питания не более 2 минут.
295.
Система имеет следующие характеристики по времени установления соединений:• время прохождения сигнала ТАНГЕНТА с момента нажатия клавиши до его появления на радиоинтерфейсе не
более 60 мс;
• время установления внутреннего соединения с момента нажатия клавиши прямого доступа или окончания
набора номера косвенного доступа до момента появления сигнала вызова у вызываемого абонента, а также с
момента нажатия вызываемым абонентом клавиши ОТВЕТ не более 100 мс;
• время установления внешнего исходящего соединения с момента нажатия клавиши прямого доступа или
окончания набора номера косвенного доступа до момента появления исходящего сигнала на внешнем
интерфейсе не более 100 мс;
• время установления входящего соединения с момента нажатия клавиши ОТВЕТ до момента установления
речевого соединения не более 100 мс;
• время задержки речевого сигнала с момента его поступления на любой интерфейс системы до момента его
появления на другом интерфейсе при установленном соединении не более 50 мс.
Система обеспечивает сопряжение по уровням входных и выходных звуковых сигналов, а также по линиям
управления со штатными средствами связи, при этом обеспечивается:
• подключение к физическим соединительным линиям (СЛ) со стандартным интерфейсом для управления
радиостанциями;
• подключение к физическим СЛ со стандартными интерфейсами для организации речевой связи с абонентами центра
УВД;
• Система может сопрягаться со следующими типами сигнальных процедур, используемых в радиопередающем и
радиоприемном оборудовании:
• четырехпроводный интерфейс с фантомной сигнализацией «ТАНГЕНТА / ОБНАРУЖЕНИЕ НЕСУЩЕЙ» + 27 В
постоянного тока;
• четырехпроводный интерфейс с фантомной сигнализацией «ТАНГЕНТА / ОБНАРУЖЕНИЕ НЕСУЩЕЙ» - 27 В
постоянного тока;
• четырехпроводный интерфейс с фантомной сигнализацией «ТАНГЕНТА / ОБНАРУЖЕНИЕ НЕСУЩЕЙ» «земля»;
• шести интерфейс с передачей команды «ТАНГЕНТА / ОБНАРУЖЕНИЕ НЕСУЩЕЙ» сигналом +24 /+ 48 В постоянного
тока по отдельной паре;
• четырехпроводный интерфейс с передачей команд «ТАНГЕНТА / ОБНАРУЖЕНИЕ НЕСУЩЕЙ» тональными
сигналами.
296.
В системе предусмотрена возможность установки интерфейсных модулей для сопряжения соследующими типами телефонного оборудования:
• двух и четырехпроводное телефонное оборудование (с питанием от центральной/местной
батареи);
• телефонное оборудование, использующее сигнальные процедуры тонального вызова
(DTMF);
• телефонное оборудование с индукторным вызовом;
• двухпроводные абонентские линии УАТС (с импульсным и частотным набором);
• аппаратура с вызовом голосом при открытом канале связи;
• оборудование, использующее сигнальные процедуры MFC-R2;
• каналы ISDN BRI (2B+D), PRI (30B+D);
• каналы E1 (сигнализация DSS1);
• аппаратура ДПУ-2, ДПУ-3 «Орех»;
• аппаратура ИВА-14/ ИВА-20.
Система имеет встроенные программные средства администрирования и конфигурирования,
обеспечивающие:
возможность разграничения прав доступа пользователей системы;
возможность изменения конфигурации системы и информации, отображаемой на
сенсорном мониторе;
регистрацию основных действий пользователей.
Система имеет встроенные средства контроля технического состояния, обеспечивающие:
контроль текущего состояния аппаратуры и режимов работы;
возможность немедленного перехода на резервный комплект при возникновении отказа
или неисправности;
автоматическое обнаружение неисправностей и отказов системы.
297.
Характеристики электропитанияЭлектропитание аппаратуры, входящей в состав системы «Мегафон» осуществляется от
электросети переменного тока (220±10 %) В частотой (50±1) Гц, при этом:
•потребляемая мощность на один не дублированный комплект - менее 300 Вт;
•время работы от источника бесперебойного питания не менее 20 мин.
Параметры электромагнитной совместимости
Система не оказывает влияния на другое оборудование и защищена от воздействия
электромагнитных воздействий в условиях электромагнитной обстановки аэропорта.
Система по уровню создаваемых индустриальных помех и электромагнитной совместимости
соответствует ГОСТ 30428-96, ГОСТ Р 51318.14.1-99, ГОСТ Р 51318.22-99,
ГОСТ Р 51318.24-99.
Оборудование системы (включая устройство сенсорного ввода команд) не производит каких-либо
излучений, опасных для технического персонала и диспетчеров УВД.
Характеристики живучести и стойкости к внешним воздействиям
По характеристикам живучести и стойкости к внешним воздействиям комплекс соответствует
требованиям группы 1.1 УХЛ в соответствии с ГОСТ В 20.39.304-76.
Аппаратура предназначена
климатических условиях:
для
эксплуатации
в
отапливаемых
помещениях
в
следующих
•температура окружающего воздуха от +5°С до +40°С;
•относительная влажность воздуха до 80% при температуре +32°С;
•атмосферное давление не ниже 460 мм. рт. ст.
Система может круглосуточно эксплуатироваться при указанных температурах окружающей среды при
расположении в отапливаемых стационарных помещениях и отапливаемых кузовах, а также после
прекращения воздействия предельных температур от минус 40°С до плюс 70°С.
298.
Аппаратура обеспечивает следующие характеристикинадежности и долговечности:
Параметры надежности
• аппаратура обеспечивает непрерывную круглосуточную работу;
• технический ресурс аппаратуры составляет 10 лет или 80 000 часов при условии выполнения регламентных
работ и использовании ЗИП;
• среднее время наработки на отказ рабочего места - не менее 10000 час.;
• среднее время наработки на отказ любого тракта радио или телефонной связи - не менее 12000 час.;
• среднее время восстановления отказавших частей не превышает 30 мин;
• гарантийный срок эксплуатации СКРС «Мегафон» – 1 год;
• гарантийный срок хранения аппаратуры составляет 2 года.
Отказом аппаратуры считается событие, при котором полностью отсутствует возможность
осуществления командной радиосвязи одного из рабочих мест с экипажами ВС (прием и передача) в
течение 15 с за исключением отказов РТС на борту ВС, отказов приемо-передающего оборудования и
линий связи и управления.
Неисправностью СКРС считается состояние изделия, при котором на одном из комплектов
наблюдается несоответствие проверяемым параметрам согласно руководству по эксплуатации.
Состав изделия
Система имеет распределённую архитектуру и построена по модульному принципу. В зависимости от
потребностей заказчика возможны различные варианты конфигурации СКРС:
•интегрированная система радио и телефонной связи (стандартная конфигурация);
•отдельная система радиосвязи;
•отдельная система телефонной связи;
Возможны также гибридные конфигурации системы.
Комплектность поставляемой системы в целом, а также отдельных функциональных модулей, определяются в
соответствии с договором поставки и проектом оснащения объекта установки. В зависимости от конфигурации СКРС,
отдельные функциональные модули могут не включаться в комплект поставки.
299.
Комплектность поставляемой системы в целом, а также отдельных функциональных модулей, определяются всоответствии с договором поставки и проектом оснащения объекта установки. В зависимости от конфигурации СКРС,
отдельные функциональные модули могут не включаться в комплект поставки.
Изложенные в настоящем разделе технические данные и характеристики распространяются на СКРС «Мегафон» в
стандартной конфигурации. На системы, поставляемые в сокращенной конфигурации, не распространяются
технические данные и характеристики, обеспечиваемые отсутствующими подсистемами.
Конфигурация и состав СКРС в каждом случае определяются конкретными параметрами объекта установки:
количеством рабочих мест диспетчеров, радиостанций, необходимостью сопряжения со штатными средствами связи и
другими. В настоящем Руководстве рассматривается типовой состав системы.
СКРС «Мегафон» включает следующие компоненты.
Оборудование рабочих мест (ОРМ) - комплекс технических средств (интерфейсных модулей,
сенсорных панелей, громкоговорителей и т.д.), размещаемых в пультах диспетчеров, расположенных в
операционных залах УВД;
Интерфейсное оборудование (ИО) - комплекс технических средств (интерфейсных модулей,
коммутационного оборудования и т.д.), предназначенных для организации взаимодействия с
внешними сетями связи и физически размещаемых в центральных стативах, расположенных в
техническом помещении;
Оборудование среды передачи данных (ОСПД) - комплекс технических средств (концентраторов,
маршрутизаторов, модемов и т.д.) и внутрисистемных линий связи (ВСЛС), предназначенных для
объединения интерфейсных модулей ОРМ и ИО в дублированную локальную вычислительную сеть;
Система технического контроля и управления (СТКУ) - комплекс технических средств (процессорных
модулей, терминалов и т.д.), физически размещаемых на рабочем месте сменного инженера
300.
Состав оборудования СКРСОбозначение
Вид комплектующих
1.Оборудование РМ, в том числе:
Коли-чество
*
1.Источник бесперебойного питания 220В
1
1.Блок питания 24В
1
1.Блок пультовых интерфейсов (БПИ), в том числе
1
1.Кроссплата БПИ
1
1.Корпус (крейт 3U)
1
1.Кабель питания БПИ
1
1.Микропроцессорный модуль
1
1.Модуль ввода – вывода
1
1.Кабель ЛВС
2
1.Сенсорный монитор (СМ)
1
1.Кабель СМ – БПИ
1
1.Блок микрофонный (БМ)
1
1.Кабель БМ – БПИ
1
1.Микрофон пультовой
1
1.Блок гарнитурный (БГ)
1
1.Кабель БГ – БПИ
1
1.Гарнитура головная
1
1.Педаль - тангента
1
1.Громкоговоритель (ГГ)
4
1.Кабель ГГ-БПИ
4
301.
1.Интерфейсное оборудование, в том числе:1
1.Шкаф монтажный 19”
1
1.Блок электрический распределительный
1
1.Источник бесперебойного питания 24В
1
1.Блок внешних интерфейсов (БВИ), в том числе:
8
1.Кроссплата БВИ
1
1.Корпус (крейт 3U)
1
1.Кабель питания БВИ
1
1.Микропроцессорный модуль
6
1.Модуль внешнего интерфейса
6-12**
1.Устройство кроссировки и коммутации (УКК), в том числе:
1
1.Внутренний кроссовый блок
1
1.Внешний кроссовый блок
1
1.Кабель внутр. кросс – БВИ
96
1.Оборудование среды передачи данных, в том числе:
1
1.Источник бесперебойного питания 220В
2
1.Коммутатор ЛВС
4
1.Кабель ЛВС-БВИ
96
1.Оборудование СТКУ
1
1.Источник бесперебойного питания
1
1.Процессорный блок СТКУ
1
1.Монитор
1
1.Клавиатура
1
1.Манипулятор (мышь)
1
1.Аудиосистема
1
1.Микрофон настольный
1
302.
Описание структуры СКРС «Мегафон»Устройство и работа
Структурная схема СКРС «Мегафон»
ОРМ 1
Интерфейсное оборудование (ИО) и оборудование среды передачи данных
смонтировано в шкафу группового оборудования (ГО), который располагается в
техническом помещении.
ACT1
LINK2
ACT2
IO
CTRL
CTRL
LINK1
UPS S Y S T EMS
MPU
D3
D3
MPU
CTRL
MPU
D3
D3
MPU
CTRL
LINK1
D3
D3
MPU
CTRL
ACT2
D3
MPU
D3
D3
MPU
CTRL
CTRL
MPU
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
UI
MPU
D3
D3
MPU
D3
D3
MPU
D3
D3
MPU
D3
D3
MPU
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
ACT2
LINK2
ACT2
MPU
UI
CTRL
LINK2
ACT2
MPU
UI
LINK2
ACT2
MPU
UI
UI
ACT2
UI
MPU
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
LINK1
ACT2
ACT2
CTRL
MPU
LINK1
ACT2
ACT2
UI
LINK2
ACT2
MPU
D3
ACT2
LINK1
MPU
D3
LINK2
CTRL
LINK2
ACT2
ACT2
UI
ИО состоит из комплекта блоков
внешних интерфейсов и устройства
кроссировки и коммутации (УКК).
ACT2
CTRL
LINK1
ACT1
LINK2
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
ACT2
MPU
IO
M G E
UPS S Y S T EMS
PUL S A R
Ev o l u t i o n
500
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
ACT2
LINK2
ACT2
MPU
UI
LINK2
ACT2
MPU
CTRL
UI
LINK2
ACT2
MPU
CTRL
UI
UI
CTRL
MPU
ACT2
UI
CTRL
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
D3
D3
MPU
D3
D3
MPU
UI
MPU
UI
MPU
D3
D3
D3
D3
CTRL
LINK1
MPU
LINK1
MPU
LINK2
ACT2
UI
LINK2
ACT2
MPU
CTRL
UI
MPU
ЛВС 1
3com
3com
ОРМ 3
ЛВС 2
CTRL
LINK1
ACT1
LINK2
ACT2
MPU
ИО
ACT1
ACT2
D3
D3
CTRL
LINK2
D3
D3
LINK1
ACT1
ACT2
CTRL
LINK2
D3
LINK1
ACT1
LINK2
ACT2
ACT1
ACT2
MPU
CTRL
LINK2
ACT2
CTRL
LINK2
UI
LINK1
ACT1
LINK2
CTRL
MPU
LINK1
ACT1
ACT2
D3
LINK1
ACT1
ACT2
D3
CTRL
LINK1
ACT1
LINK2
MPU
D3
CTRL
LINK2
ACT2
D3
LINK1
ACT1
LINK2
ACT2
D3
LINK1
ACT1
LINK2
D3
CTRL
LINK1
ACT1
ACT2
MPU
PUL S A R
Ev o l u t i o n
500
CTRL
LINK1
ACT1
LINK2
M G E
ОРМ 2
Оборудование
среды
передачи
данных формирует дублированную
локальную вычислительную сеть
(ЛВС). Сети обозначаются ЛВС 1 и
ЛВС 2.
CTRL
LINK1
MPU
3com
ОСПД
IO
3com
M G E
UPS S Y S T EMS
PUL S A R
Ev o l u t i o n
500
M G
E
M G
E
UPS S Y S T EMS
PUL S A R
Ev o l u t i o n
500
UPS S Y S T EMS
PUL S A R
Ev o l u t i o n
500
HPSµV
Rectifier
HPSµV
HPSµV
Rectifier
HPSµV
Rectifier
HPSµV
Rectifier
Rectifier
Блок электрический
распределительный
Переключатель
вводов
ОРМ 4
Ввод I
Ввод II
220В
потреб.1
220В
потреб.2
220В
потреб.3
220В
потреб.4
24В
потреб.5
24В
потреб.6
24В
потреб.7
24В
потреб.8
24В
потреб.9
24В
24В
24В
24В
24В
24В
24В
потреб.10 потреб.11 потреб.12 потреб.13 потреб.14 потреб.15 потреб.16
CTRL
LINK1
ACT1
LINK2
ACT2
MPU
IO
M G E
UPS S Y S T EMS
PUL S A R
Ev o l u t i o n
500
СТКУ
ОРМ n
CTRL
LINK1
ACT1
LINK2
ACT2
MPU
IO
M G E
UPS S Y S T EMS
PUL S A R
Ev o l u t i o n
500
Основные блоки ОРМ:
•источник бесперебойного питания
(ИБП);
•источник питания 24В;
•блок пультовых интерфейсов
(БПИ);
•блок микрофонный (БМ);
•блок гарнитурный (БГ);
•сенсорный монитор диагональю
12”.
Система технического контроля и
управления (СТКУ) представляет собой
персональный компьютер, оснащенный
комплексом программных средств,
предназначенных для централизованного
управления, контроля и
конфигурирования СКРС.
303.
Интерфейсное оборудование (ИО) и оборудование среды передачи данных смонтировано в шкафу группового оборудования(ГО), который располагается в техническом помещении.
Оборудование среды передачи данных формирует дублированную локальную вычислительную сеть (ЛВС).
Сети обозначаются ЛВС 1 и ЛВС 2.
Работа каждой ЛВС поддерживается парой сетевых коммутаторов, подключенных
через источник бесперебойного питания (ИБП). К портам первого коммутатора
подключаются модули ИО. К портам второго коммутатора подключаются блоки
пультовых интерфейсов (БПИ), размещенные на рабочих местах.
Интерфейсное оборудование предназначено для подключения радиоканалов и внешних абонентов СКРС. ИО построено
по модульному принципу, что обеспечивает лёгкость переконфигурирования и наращивания аппаратуры.
ИО состоит из комплекта блоков внешних интерфейсов и устройства кроссировки и коммутации (УКК).
Блоки внешних интерфейсов собираются в 19” крейтах и размещаются в верхней части шкафа ГО. Они
нумеруются сверху вниз с БВИ 1 по БВИ 8. Каждый БВИ получает питание 24В от блока электрического
распределительного (БЭР), через выделенный автомат защиты. Для обеспечения потребителей постоянного тока применяется
источник бесперебойного питания 24В (ИБП 24В). ИБП 24В и БЭР размещены в нижней части шкафа ГО.
БВИ содержит кроссплату, имеющую общую шину питания и независимые шины данных/управления для каждого
интерфейсного модуля.
Каждый БВИ содержит 6 интерфейсных модулей, через которые СКРС «Мегафон» сопрягается с радиостанциями и
внешними сетями телефонной связи. Каждый интерфейсный модуль включает микропроцессорный модуль (МПМ) и
модуль внешнего интерфейса (МВИ), физически выполненные на разных печатных платах.
Все МПМ однотипны и аналогичны тем, которые используются в аппаратуре рабочих мест. В интерфейсном
оборудовании МПМ выполняют задачи по обмену речевой и командной информацией между ЛВС и модулем внешнего
интерфейса. Каждый процессорный модуль включен в дублированную ЛВС через соответствующие порты.
Модуль внешнего интерфейса обеспечивает аналого-цифровое и цифро-аналоговое преобразования, а также
электрическое сопряжение с внешним оборудованием связи. В СКРС «Мегафон» применяются модули внешних
интерфейсов нескольких типов, в зависимости от вида сопрягаемого оборудования.
304.
СКРС «Мегафон» обеспечивает возможность полностью независимой работы для каждого интерфейса. В этом случае однонаправление обслуживает отдельный интерфейсный модуль и его отказ приводит к отказу только одной внешней связи.
При сопряжении СКРС с местными системами ГГС, в основном, используются четырехканальные МВИ, которые могут попарно
взаимодействовать с МПМ в рамках одного интерфейсного модуля. Таким образом, интерфейсный модуль может обслуживать
до 8 линий, например, при сопряжении с ДПУ-3.
Устройство кроссировки и коммутации состоит из двух кроссовых блоков, размещенных в задней части шкафа ГО. Вверху
расположен внутренний кроссовый блок. Все его 48 плинтов жестко связаны с соответствующими модулями ИО. Внизу
расположен внешний кроссовый блок. Он также содержит 48 плинтов, которые используются для подключения радиоканалов и
внешних абонентов СКРС.
Между внешним и внутренним кроссовыми блоками при настройке СКРС осуществляется коммутация согласно
таблице подключений ИО.
ОРМ устанавливается на рабочих местах диспетчеров и технического персонала. Блоки ОРМ монтируются по установленной
схеме в соответствие с типом пульта. Блоки соединяются внутри пульта штатными кабелями.
Основные блоки ОРМ:
•источник бесперебойного питания (ИБП);
•источник питания 24В;
•блок пультовых интерфейсов (БПИ);
•блок микрофонный (БМ);
•блок гарнитурный (БГ);
•сенсорный монитор диагональю 12”.
Электропитание ОРМ осуществляется от сети 220В через ИБП, к которому подключен источник питания 24В. БПИ подключен к
этому источнику кабелем питания.
Блок пультовых интерфейсов собран в крейте и содержит кроссплату и единственный интерфейсный модуль, состоящий из МПМ
и модуля ввода-вывода (IO).
305.
МПМ осуществляет обработку звуковой, служебной и командной информации, поступающей от внешнихустройств и из локальной вычислительной сети, а также команд пользователя от сенсорной панели. Модуль вводавывода обеспечивает аналого-цифровое и цифро-аналоговое преобразования для периферийных устройств:
микрофонов, громкоговорителей и т.п.
БМ и БГ устанавливаются в специальные ячейки на столешнице пульта и предназначены для подключения
микрофона и гарнитур соответственно. Кроме того, к специальному разъему БГ подключается педаль – тангента,
используемая для управления радиосвязью.
Сенсорный монитор совмещает функции устройства отображения и устройства ввода команд. В зависимости от
режима работы системы, на экране монитора отображаются различные управляющие элементы: адресные клавиши
телефонной связи или радиосвязи, функциональные клавиши и т.п. Адресные клавиши отображают состояние
соответствующих абонентов: свободен, занят, вызывает и т.п. Сенсорный монитор соединен с кроссплатой БПИ
кабелем управления и питания.
Система технического контроля и управления (СТКУ) представляет собой персональный компьютер, оснащенный комплексом
программных средств, предназначенных для централизованного управления, контроля и конфигурирования СКРС.
Оборудование СТКУ устанавливается на рабочем месте сменного инженера. Процессорный блок СТКУ подключается
к дублированной ЛВС СКРС «Мегафон».
Оборудование СТКУ обеспечивает:
непрерывный контроль работы СКРС;
дистанционное управление и настройку интерфейсов.
сигнализацию при отказах и их локализацию до уровня
типового элемента замены;
ведение журнала работы;
конфигурирование системы.
306.
СКРС «Мегафон» включает:Состав и структура
•оборудование рабочих мест операторов, обеспечивающее развитый пользовательский интерфейс;
•интерфейсное оборудование, предназначенное для сопряжения СКРС с внешним телефонным и
радиооборудованием;
•высокоскоростную сеть передачи речевой и сигнальной информации;
•система технического контроля и управления.
Оборудование рабочего места оператора включает:
•блок пультовых интерфейсов;
•сенсорный монитор;
•периферийные устройства;
Рабочее место оператора оснащено следующими периферийными устройствами:
•настольным микрофоном на гибкой стойке;
•одной (двумя) головными гарнитурами (как правило, Plantronics), панель подключения монтируется в
торец столешницы пульта (только для рабочих мест с интерфейсами радиосвязи);
•громкоговорителями (от 1 до 4);
•ножной педалью «тангента».
Имеются интерфейсы для документирования на аналоговом магнитофоне радио и телефонных
переговоров как с двух отдельных выходов, так и с одного объединенного.
Блок пультовых интерфейсов (БПИ) содержит микропроцессорный модуль и модуль ввода-вывода.
Модуль ввода-вывода предназначен для подключения периферийных устройств и выполняет
аналого-цифровое преобразование речевых сигналов поступающих с микрофонов
(настольного и/или головных гарнитур) и цифро-аналоговое преобразование речевых сигналов
поступающих на гарнитуры и громкоговорители. Интерфейсный и процессорный модули
соединены TDMA - шиной. Речевая информация с выбранного источника (например,
микрофона гарнитуры) делится на фрагменты длительностью 8 мс, которые помещаются в
голосовые IP-пакеты и оправляются в сеть.
307.
Сенсорный экран соединен с БПИ через последовательный интерфейс. Команды оператора(например, на установление соединения с заданным абонентом) преобразуются в управляющие IPпакеты и передаются по той же сети, что и голосовые
Интерфейсное оборудование состоит из независимых интерфейсных модулей, размещаемых по 6 в
блоках пультовых интерфейсов.
•микропроцессорный модуль;
Каждый интерфейсный модуль включает:
•модули внешних интерфейсов (два или один).
Модули внешних интерфейсов обеспечивают электрический интерфейс с внешними линиями
соответствующих типов и (при необходимости) аналого-цифровое и цифро-аналоговое
преобразование.
Микропроцессорные модули преобразуют входящую внешнюю
сигнализацию в управляющие IP-пакеты.
Для
передачи
используется
коммутируемая
сеть
Ethernet
(100
Base-T/FX,
1000 Base Т/FX), конфигурация сети определяется потребностями конкретного места установки.
Система технического контроля и управления представляет собой один
персональных компьютеров, подключенный к общей сети. СТКУ обеспечивает:
•непрерывный контроль работы СКРС;
•сигнализацию при отказах и их локализацию до уровня типового элемента замены;
•ведение журнала работы;
•дистанционную настройку интерфейсов;
•реконфигурирование системы.
или
несколько
308.
309.
Принцип действия системыСистема построена на основе методов пакетной коммутации и управления данными. В качестве среды передачи данных
используется дублированная ЛВС типа «Ethernet», объединяющая МПМ интерфейсов ИО и ОРМ, а также процессорный блок СТКУ.
Каждый микропроцессорный модуль является приемопередающей станцией ЛВС
МПМ
МВИ
МПМ
ЛВС 1
ЛВС 2
Общий принцип организации СКРС «Мегафон»
Интерфейс n
МПМ
МВИ
Интерфейс 3
МВИ
Интерфейс 2
Интерфейс 1
Линии, каналы, устройства и т.п.
МВИ
Станция непрерывно транслирует в сеть управляющие пакеты,
содержащие информацию о состоянии станции. При работе
на передачу станция транслирует в сеть также пакеты данных,
содержащих оцифрованный звук от источника (микрофона
или
приёмника
радиостанции).
Одновременно
осуществляется считывание из сети всех управляющих
пакетов, а также пакетов данных, предназначенных для
данной станции.
МПМ
Управляющие пакеты рассылаются широковещательно, для
всех станций, включенных в ЛВС. Таким образом, все станции
«видят» текущее состояние друг друга. Управляющие пакеты
транслируются в ЛВС непрерывно. В управляющих пакетах
передаётся командная информация (вызов, отбой, занятость и
прочее), используемая для установления и разрыва
соединений.
Пакеты данных рассылаются адресно: их принимает только та станция (станции), для которой они предназначены. Пакеты данных
передаются только тогда, когда между станциями установлено соединение.
Каждая станция, как правило, имеет единственный источник (входное устройство) звуковой информации. Например, для станции
ОРМ источником является микрофон пульта или гарнитура. Для станций ИО источниками аналоговых сигналов являются приемники
радиостанций и абоненты внешних по отношению к СКРС «Мегафон» сетей связи: ДПУ, ИВА, телефонной сети и т.п.
Звуковой сигнал от источника через интерфейсную аппаратуру (МВИ) поступает в микропроцессорный модуль в цифровом виде. В
МПМ поток звуковых данных разбивается на фрагменты длительностью по 8 мс.
310.
При работе станции на передачу каждый фрагмент снабжается заголовком, включающим адресную информацию.Таким образом, формируются пакеты фиксированной длины, содержащие поле заголовка и поле данных. Поле
заголовка содержит адрес абонента – отправителя пакета и адрес абонента – получателя. По готовности пакет
транслируется в ЛВС. Непрерывная последовательность пакетов от одного источника является его потоком.
Все станции в сети равноправны и используют один общий канал для передачи и приема пакетов. Одна станция может
транслировать в ЛВС один или несколько потоков одновременно в зависимости от типа и числа МВИ данного интерфейса.
На стороне станции – получателя обработка пакетов данных осуществляется в обратном порядке. Станция принимает
адресованные ей пакеты данных, извлекает из пакетов звуковую информацию и передаёт её в МВИ. Модуль внешнего
интерфейса осуществляет цифроаналоговое преобразование информации и выдачу звукового сигнала на периферийное
устройство: громкоговоритель, динамик гарнитуры, внешнему абоненту и т.п.
Общие принципы взаимодействия с внешними устройствами
Модули внешних интерфейсов ОРМ и ИО выполняют функции аппаратуры сопряжения – обеспечение взаимодействия СКРС с
периферийными устройствами связи. В качестве последних могут быть устройства, входящие в состав СКРС, такие, как
микрофоны, громкоговорители пультов, а так же устройства связи объекта установки: радиостанции, оборудование телефонной
связи и т. п.
МВИ осуществляют двусторонний обмен данными с МПМ по кроссплате БВИ (БПИ) через интерфейс HSS. Сигналы дискретных и
аналоговых входов МВИ преобразуются в единый входной цифровой поток, который транслируется в МПМ. Одновременно
осуществляется чтение и обработка выходного потока. Аппаратура сопряжения осуществляет преобразование полученных данных
в дискретные и аналоговые сигналы, которые выводятся на соответствующие цифровые и аналоговые выходы.
Для обмена информацией между МПМ и МВИ используется временное мультиплексирование (TDM) с 32 каналами по 64 кбит/с.
Для каждого внешнего устройства подключаемого к МВИ резервируется набор временных слотов для обмена с МПМ
оцифрованным звуком и управляющими сигналами. При этом для каждого внешнего канала интерфейсного модуля
обеспечивается один раз в 125 мкс (8 кГц) обмен с МПМ фреймами со звуковыми данными, а также фреймами с управляющими
сигналами. Звуковой фрейм содержит однобайтный отсчет ИКМ. Управляющие сигналы обеспечивают входящую/исходящую
линейную сигнализацию для интерфейсов, работу пультовых устройств ОРМ (тангента, ЖКИ ), а также дистанционную настройку
интерфейсных плат средствами СТКУ.
311.
Протокол распределения слотов специфичен для каждого типа МВИ. При использовании двух плат МВИ на один интерфейсныймодуль привязка слотов производится с учетом позиции установки. Допускается сдвоенная установка только однотипных плат
МВИ.
При конфигурировании каждого интерфейса создается таблица соответствия входных и выходных каналов используемых МВИ
конкретным абонентам СКРС.
Для выдачи команд и звука на периферийное устройство МПМ записывает данные в соответствующий выходной канал МВИ, а
для получения информации от устройства, МПМ читает данные из входного канала.
Общие принципы взаимодействия с внешними устройствами
Модули внешних интерфейсов ОРМ и ИО выполняют функции аппаратуры сопряжения – обеспечение взаимодействия СКРС с
периферийными устройствами связи. В качестве последних могут быть устройства, входящие в состав СКРС, такие, как
микрофоны, громкоговорители пультов, а так же устройства связи объекта установки: радиостанции, оборудование телефонной
связи и т. п.
МВИ осуществляют двусторонний обмен данными с МПМ по кроссплате БВИ (БПИ) через интерфейс HSS. Сигналы дискретных и
аналоговых входов МВИ преобразуются в единый входной цифровой поток, который транслируется в МПМ. Одновременно
осуществляется чтение и обработка выходного потока. Аппаратура сопряжения осуществляет преобразование полученных данных
в дискретные и аналоговые сигналы, которые выводятся на соответствующие цифровые и аналоговые выходы.
Для обмена информацией между МПМ и МВИ используется временное мультиплексирование (TDM) с 32 каналами по 64 кбит/с.
Для каждого внешнего устройства подключаемого к МВИ резервируется набор временных слотов для обмена с МПМ
оцифрованным звуком и управляющими сигналами. При этом для каждого внешнего канала интерфейсного модуля
обеспечивается один раз в 125 мкс (8 кГц) обмен с МПМ фреймами со звуковыми данными, а также фреймами с управляющими
сигналами. Звуковой фрейм содержит однобайтный отсчет ИКМ. Управляющие сигналы обеспечивают входящую/исходящую
линейную сигнализацию для интерфейсов, работу пультовых устройств ОРМ (тангента, ЖКИ ), а также дистанционную настройку
интерфейсных плат средствами СТКУ.
Протокол распределения слотов специфичен для каждого типа МВИ. При использовании двух плат МВИ на один интерфейсный
модуль привязка слотов производится с учетом позиции установки. Допускается сдвоенная установка только однотипных плат
МВИ.
312.
При конфигурировании каждого интерфейса создается таблица соответствия входных и выходных каналов используемыхМВИ конкретным абонентам СКРС.
Для выдачи команд и звука на периферийное устройство МПМ записывает данные в соответствующий выходной канал
МВИ, а для получения информации от устройства, МПМ читает данные из входного канала.
Средства измерения, инструмент и принадлежности
В комплект ЗИП изделия АСРС включены следующие
средства измерения и специальные инструменты:
Универсальный монтажный инструмент «Krone».
Инструмент «Krone» предназначен для монтажа кабелей линий управления радиостанциями и внешних
телефонных линий на плинты устройства кроссировки ИО.
Маркировка и пломбирование
Маркировка блоков
Входящие в состав изделия основные блоки промаркированы тремя видами ярлыков.
Ярлык №1 (идентификационный) содержит децимальный номер изделия (блока).
Ярлык №2 (технологический) содержит следующие сведения:
• децимальный номер комплекса (для блоков, входящих в состав применяемых в комплексе подсистем –
децимальный номер подсистемы);
Серийный номер блока выглядит следующим образом
• наименование комплекса (подсистемы);
XXXXX.YY.ZZ.NN, где:
• дату выпуска комплекса (подсистемы);
XXXXX – пятизначный серийный номер комплекса (подсистемы);
• наименование блока;
YY – двухзначный код компонента комплекса (подсистемы);
• серийный номер блока.
ZZ – двухзначный код блока;
NN – порядковый номер блока.
Ярлык №3 (монтажный) содержит условное обозначение блока в соответствии со схемой подключения.
313.
Маркировка разъёмовКабельные разъёмы блоков маркируются наклейками, содержащими номер разъёма в соответствии со
схемой подключения.
Некоторые разъёмы, назначение которых очевидно, могут не иметь маркировки (например, выходные
разъёмы источников бесперебойного питания, разъёмы мониторов, сетевых адаптеров и т.п.).
Маркировка кабелей
Кабели маркируются ярлыками, расположенными около разъёмов. Ярлык содержит
условное обозначение подключаемого блока и, если требуется, номер разъёма, в соответствии
со схемой подключения.
При необходимости кабель маркируется также ярлыком, содержащим название кабеля
и/или его децимальный номер.
Для кабелей, которые монтируются на клеммы и плинты (проводной монтаж)
применяется цветовая маркировка проводов.
Упаковка
Для упаковки изделия применяется картонная и деревянная тара, позволяющая размещать и
транспортировать изделие автомобильным, воздушным и железнодорожным видами транспорта.
Каждое место маркируется ярлыком, содержащем наименование и заводской номер комплекса,
наименование упакованного изделия и номер тары в поставке.
На каждое место составляется два экземпляра упаковочного листа, один из которых укладывается
в тару, а второй поставляется в комплекте сопроводительных документов на изделие.
314.
Описание и работа программного обеспеченияОбщие сведения
Программное обеспечение устанавливается на каждый микропроцессорный модуль ИО и ОРМ, на
микрокомпьютеры сенсорных мониторов, а также на компьютере СТКУ.
Программное обеспечение СКРС обеспечивает надежность функционирования
обнаружение ошибок и сбоев, отказоустойчивость и самовосстановление.
Программное
обеспечение
системы
включает в себя:
системное ПО;
прикладное ПО.
Программное обеспечение СТКУ обеспечивает
возможность самодиагностики, обнаружения
отказов и сбоев, изоляции отказавших
элементов и вывода из обслуживания
дефектного тракта или линии. Кроме того, ПО
СТКУ обеспечивает дистанционный контроль и
управление интерфейсами ИО с возможностью
прослушивания и настройки каналов.
Построение
программного
обеспечения
обеспечивает
возможность
наращивания
системы,
управления
модификацией
и
конфигурацией.
системы,
В состав системного ПО входят операционная
система
Linux,
(на
СТКУ
Windows XP), необходимые драйвера, а также
средства защиты от несанкционированного доступа.
Прикладное ПО МПМ обеспечивает выполнение
специфических функций в реальном масштабе
времени, таких как обработка вызова, управление
процессом установления соединения и т.п.
Прикладное
ПО
сенсорных
мониторов
обеспечивает функционирование пользовательского
интерфейса управления связью на рабочем месте.
Оно выполняет прорисовку экрана и прием
управляющих команд.
315.
Состав программного обеспеченияВ СКРС «Мегафон» предусмотрено два варианта комплектации программного
обеспечения:
ПО МПМ – устанавливается на микропроцессорных модулях ОРМ и ИО;
ПО СМ – устанавливается на микрокомпьютерах сенсорных мониторов ОРМ;
ПО СТКУ – устанавливается на процессорном блоке СТКУ.
В состав
входит:
ПО
МПМ
МПМ- микропроцессорный модуль
системное ПО (операционная система Linux);
прикладное ПО.
Файлы ПО МПМ
Имя файла
/vcss/megaphone3
/vcss/megaphone3startup
/vcss/megaphonedown
/vcss/megaphoneface
/vcss/megaphonefaceHUP
/vcss/megaphonefacereboot
/vcss/megaphonefacerecalibr
/vcss/megaphoneHUP
/vcss/megaphonereboot
/vcss/startup
Назначение
Исполняемый файл
Исполняемый файл автонастройки
Скрипт завершения работы
Скрипт дист. управления СМ
Скрипт дист. управления СМ
Скрипт дист. управления СМ
Скрипт дист. управления СМ
Скрипт перезапуска ПО
Скрипт перезагрузки
Основной исполняемый сценарий
Загрузка,
исполнение
Автоматически
Автоматически
Автоматически
Автоматически
Автоматически
Автоматически
Автоматически
Автоматически
Автоматически
Автоматически
В подкаталогах /vcss размещены также файлы, предназначенные для хранения данных,
необходимых для работы прикладного ПО.
/vcss/conf – текстовые файлы конфигурации.
316.
В составвходит:
ПО
СМ
системное ПО (операционная система Linux);
прикладное ПО.
СМ
- сенсорный монитор
Файлы ПО СМ
Имя файла
/vcss/megaphone3face
/vcss/megaphonecrash
Назначение
Исполняемый файл
Индикация аварийного
программы
Загрузка,
исполнение
Автоматически
завершения Автоматически
/vcss/megaphonecrash_ru.qm Поддержка русского языка
/vcss/megaphonedown
Скрипт завершения работы
/vcss/megaphoneface_ru.qm Поддержка русского языка
/vcss/megaphoneHUP
Скрипт перезапуска ПО
/vcss/megaphonekill
Скрипт прерывания работы ПО
/vcss/megaphonereboot
Скрипт перезагрузки
/vcss/megaphonestartup
Исполняемый файл автонастройки
/vcss/phonebook.dat
Записи телефонной книги
/vcss/reclibr
Скрипт запуска калибровки монитора
Автоматически
Автоматически
Автоматически
Автоматически
Автоматически
Автоматически
В подкаталогах /vcss размещены также файлы, предназначенные для хранения данных, необходимых
для работы прикладного ПО.
/vcss/BMP – графические файлы, используемые для отображения элементов главного окна;
/vcss/ring – звуковые файлы, используемые для генерации различных сигналов вызовов;
/vcss/touchutils – утилиты настройки сенсорной панели;
/vcss/conf – текстовые файлы конфигурации.
317.
СТКУ- система технического контроля и управленияВ состав ПО СТКУ
входит:
системное ПО (операционная система Windows XP);
прикладное ПО.
Файлы прикладного ПО расположены в каталоге: C:\ArmEngine2003.
Имя файла
Файлы ПО СТКУ
Назначение
arm.exe
default.arm
exec.exe
nd.cfg
ndbase.dll
ndgraphics.dll
ndmegaphone3.dll
voicecenter3config.dll
Исполняемый файл
Путь к базовой конфигурации мнемосхемы
Файл поддержки функций управления
Конфигурация СТКУ
Базовая библиотека
Библиотека графических элементов
Библиотека функций для Мегафон 3
Библиотека функций конфигурирования СКРС
*.nd
Конфигурация мнемосхемы СТКУ
В подкаталоге C:\ArmEngine2003\NDLog – хранятся файлы
протокола работы системы.
C:\VoiceComm\conf – подкаталог,
текстовые файлы конфигурации.
в
котором
хранятся
Загрузка,
исполнение
Автоматически
Автоматически
318.
Функциональное назначениеФункциональное назначение ПО СКРС «Мегафон».
ПО МПМ ИО и ОРМ обеспечивает решение
следующих
основных
функциональных
задач:
обеспечение речевого взаимодействия абонентов СКРС между собой;
обеспечение речевого взаимодействия абонентов СКРС с внешними абонентами и
радиоканалами;
обеспечение автоматического обновления конфигурации МПМ.
ПО
СМ
ОРМ
обеспечивает
решение
следующих основных функциональных задач:
обеспечение пользователю развитого интерфейса для управления соединениями
с помощью сенсорных мониторов;
обеспечение функций диагностики и настройки пультовых устройств ОРМ ;
обеспечение автоматического обновления конфигурации экрана СМ.
ПО СТКУ обеспечивает решение следующих
основных функциональных задач:
непрерывный мониторинг состояния СКРС и выдачу аварийных сообщений;
дистанционное управление состоянием рабочих мест системы;
дистанционное управление и настройка внешних интерфейсов ИО;
конфигурирование СКРС в процессе развертывания и эксплуатации.
319.
Описание логической структурыЛогическая структура ПО ОРМ и ИО
COM порт
Интерфейс устройства n
Драйвер
Serial
Интерфейс устройства 2
Данные
обрабатываемые
сигнальными
интерфейсами
Центральным
модулем
является
коммутатор,
обеспечивающий
перераспределение данных и команд в
соответствии с заданной конфигурацией
станции между прочими модулями ПО.
Интерфейс устройства 1
Сигнальный
интерфейс
Менеджер
соединений
Интерфейс
сенсорного монитора
Дистанционное
управление
экраном
Коммутатор
Коммутатор
каналов
Коммутатор
пакетов
Пакеты
данных
Обработчик данных
администрирования
Пакеты
упраления
Сетевой
интерфейс
IO интерфейс
Структурированный
поток входных/выходных
данных устройств
Пакеты данных,
управления и
администрирования
Драйвер
устройства (TDM)
Драйвер
Ethernet 0
Модули внешних
интерфейсов
ЛВС 1
Условные обозначения:
Обмен командами между модулями
Пакеты
администрирования
Драйвер
Ethernet 1
Логическая структура ПО МПМ
ЛВС 2
Коммутатор
обеспечивает
два уровня коммутации данных:
коммутацию данных на уровне
пакетов ЛВС;
коммутацию данных на уровне
устройств (каналов МВИ).
По
командам,
получаемым
от
интерфейсов
устройств,
коммутатор
осуществляет
перемещение голосовых данных из
сетевых пакетов в устройства (при
входящей связи) и наоборот (при
исходящей связи). Голосовые данные
направляются также в интерфейс
устройства для анализа и обработки.
За
обслуживание
каждого
физического
интерфейса, подключенного к станции, отвечает
отдельный программный модуль (объект) типа
«интерфейс устройства». Количество и типы
объектов определяется конфигурацией станции и
строго соответствует количеству и типам устройств.
320.
Каждый интерфейс устройства содержит. сигнальныйинтерфейс и менеджер соединений
Логическая структура ПО МПМ
COM порт
Интерфейс устройства n
Драйвер
Serial
Интерфейс устройства 2
Данные
обрабатываемые
сигнальными
интерфейсами
Интерфейс устройства 1
Сигнальный
интерфейс
Менеджер
соединений
Сигнальный интерфейс обеспечивает
взаимодействие с устройством, анализируя
и формируя голосовые и командные
данные, принимаемые от устройства и
посылаемые устройству.
Интерфейс
сенсорного монитора
Дистанционное
управление
экраном
Коммутатор
Коммутатор
каналов
Коммутатор
пакетов
Пакеты
данных
Обработчик данных
администрирования
Пакеты
упраления
Структурированный
поток входных/выходных
данных устройств
Пакеты данных,
управления и
администрирования
Драйвер
устройства (TDM)
Драйвер
Ethernet 0
Модули внешних
интерфейсов
ЛВС 1
Условные обозначения:
Обмен командами между модулями
Пакеты
администрирования
Сетевой
интерфейс
IO интерфейс
Менеджер
соединений
осуществляет анализ входящих и
формирование исходящих пакетов
управления.
Исходящие
пакеты
формируются
и
транслируются
сетевому интерфейсу для передачи
в ЛВС непрерывно.
Драйвер
Ethernet 1
ЛВС 2
При использовании ПО МПМ на рабочих местах
(в
ОРМ)
функционирует
единственный
интерфейс устройства типа «Терминал
рабочего
места».
Данный
интерфейс
взаимодействует с интерфейсом сенсорного
монитора.
321.
Интерфейс СМ обеспечивает обмен командной информацией с устройством ввода/отображения (сенсорныммонитором).
Обработчик данных администрирования реализует управляющие воздействия, передаваемые СТКУ через ЛВС, в том
числе:
команды дистанционного управления и настройки интерфейсов устройств;
команды управления дистанционным прослушиванием каналов;
команды дистанционного управления сенсорным монитором.
Логическая структура ПО СТКУ
Схема взаимодействия программных модулей СТКУ
Чтение
Конфигуратор
Запись
Интерфейс
пользователя
Вызов
Чтение
Протокол
Отображение
состояния
Команды
управления
Запись
Данные
конфигурации
Модуль
управления
Анализ пакетов
управления
FTP клиент
Пакеты
администри
рования
Пакеты
данных
конфигурации
Пакеты
управления
Сетевой
интерфейс
Пакеты управления
и администрирования
Драйвер
Ethernet 0
Драйвер
Ethernet 1
Логическая структура
ЛВС 1
ЛВС 2
ПО СТКУ
322.
Вызов и загрузкаВызов и загрузка программного обеспечения выполняется при
включении вычислительного узла после того, как выполнится
процедура тестирования аппаратного обеспечения. Поэтому не
требуется выполнения дополнительных действий для запуска
программных модулей ПО.
Некоторые программные модули загружаются автоматически
при выполнении тех или иных действий (см. таблицы).
Загрузка ПО МПМ
Программное обеспечение МПМ ОРМ и ИО загружается
последовательности:
1 Загрузка операционной системы Linux.
в
нижеизложенной
2 Запуск основного стартового сценария. Сценарий содержит последовательность
команд запуска различных программных модулей и управляет процессом дальнейшей
загрузки.
3 Проверка новой конфигурации на СТКУ и при наличии производится ее
получение.
4
Запуск
программы
«megaphone3startup»):
чтения
и
применения
конфигурации
Программа выполняет следующие действия:
4.1 Считывание адреса модуля с кроссплаты БВИ/БПИ.
4.2 Чтение соответствующей конфигурации из файлов в каталоге «conf».
4.3 Конфигурирование локальной вычислительной сети.
5 Запуск основной программы интерфейсного модуля (файл «megaphone3»)
(файл
323.
Загрузка ПО СМПрограммное
обеспечение
микрокомпьютера
сенсорного монитора запускается следующим
образом:
1 Загрузка операционной системы Linux.
2 Запуск стартового сценария.
3 Проверка новой конфигурации на МПМ и при наличии производится ее получение.
4 Запуск программы чтения и применения конфигурации (файл «megaphonestartup»)
5 Загрузка графической подсистемы.
6 Запуск прикладного ПО
Если задан штатный режим запуска, выполняется запуск прикладного ПО рабочего места (файл
«megaphone3face»).
Если задан режим калибровки сенсорной панели, то запускается соответствующий интерфейс.
Загрузка ПО СТКУ
Программное обеспечение СТКУ запускается
следующим образом:
1 Загрузка операционной системы Windows ХР.
2 Автоматический запуск прикладной программы (исполняемый файл
arm.exe).
Запуск режимов конфигурирования, коррекции системного времени, протокола и прочих
осуществляется по команде пользователя.
Интерфейс СКРС «Мегафон» не допускает вызов оператором других программ или выполнение
системных операций.
324.
Входные данныеВходными данными для ПО СКРС «Мегафон»
являются:
данные конфигурации;
голосовые данные;
командные данные.
Данные конфигурации
Данные конфигурации хранятся в текстовых файлах каталога conf.
Данные используются программным модулем megaphone3startup (megaphonestartup
– в ПО СМ) для настройки ПО в процессе запуска.
Загрузка и обновление данных конфигурации осуществляется по ЛВС по
стандартному протоколу «ftp» автоматически при перезапусках МПМ, а также в
процессе распространения конфигурации с компьютера СТКУ.
Данные конфигурации системы задаются администратором при работе с ПО СТКУ.
На рабочих местах к данным конфигурации относятся также пользовательские настройки рабочих
мест. Данные настройки вводятся с пользователем с терминала (сенсорной панели) и используются
для оперативного конфигурирования рабочего места. Указанные настройки обрабатывает ПО СМ.
325.
Голосовые данные поступают в систему двумяпутями:
от устройств рабочего места (микрофонов,
подключенных к МВИ, - через драйвер.
Голосовые данные
входных
линий
интерфейсов),
от прочих интерфейсных модулей ОРМ и ИО по ЛВС.
Система осуществляет коммутацию поступающих голосовых
данных в соответствии с командной информацией и данными
конфигурации. Голосовые данные из входящих сетевых пакетов
перенаправляются порты драйвера устройства, и наоборот.
В рамках диагностики и настройки интерфейсов может
осуществляться передача голосовых данных с терминала СТКУ
на интерфейсы ИО и ОРМ.
Командные данные
Командные
тремя путями:
данные
поступают
в
систему
по ЛВС от прочих интерфейсных модулей ОРМ и ИО – информация в
управляющих пакетах о состоянии прочих рабочих мест, внешних
абонентов, радиостанций;
от интерфейса сенсорного монитора – команды
установление, отбой соединений и т.п.;
от внешних абонентов через МВИ: запросы на установление соединений,
данные о текущем состоянии абонентов.
пользователя на
326.
Командные данные администрированияВ числе командных данных администрирования
различают:
1. Данные от СТКУ на изменение режима работы ОРМ или интерфейсного
модуля ИО: команды выключения, перезагрузки, калибровки сенсорной панели.
2. Данные от СТКУ на изменение параметров работы интерфейсов, а также
запросы на дистанционное прослушивание каналов и выдачу в канал речевого
сигнала или генератора.
Данные поступают по ЛВС по стандартному протоколу «rlogin» и отрабатываются программными
модулями, ответственными за выполнение соответствующих команд.
Выходные данные
Выходными данными для ПО ОРМ и ИО
являются:
голосовые данные;
командные данные.
Голосовые данные
Голосовые данные для устройств рабочего места и каналов интерфейсных модулей ИО
передаются через драйвер в МВИ для выдачи на соответствующие устройства: громкоговорители,
выходные линии интерфейсов.
Голосовые данные для прочих интерфейсных модулей ОРМ и ИО оформляются в голосовые
пакеты и направляются в ЛВС.
При выполнении дистанционной настройки интерфейсов, по запросу, голосовые данные
направляются в ЛВС для СТКУ.
327.
Командные данныеКомандные данные для прочих интерфейсных модулей ОРМ и ИО оформляются в командные
пакеты и направляются в ЛВС. Данные содержат сведения о состоянии абонента (свободен, занят и
прочие), а также запросы на установление, разрыв и обслуживание соединений с другими
абонентами.
Командные данные для внешних устройств и абонентов (запросы на установление соединения,
команды изменения состояния внешних устройств) выдаются через драйвер в МВИ для выдачи на
соответствующие устройства.
Командные данные для сенсорного монитора выдаются в драйвер COM порта, к которому на
рабочих местах подключается СМ. Эти данные используются для управления отображением
информации.
Сообщения оператору
Описание интерфейса рабочего места и сообщений оператору приведено в НКПГ.465235.001
РЭ2 «Руководство пользователя».
Описание интерфейса СТКУ и сообщений оператору приведено в НКПГ.465235.001 РЭ1
«Руководство администратора».
328.
Описание и работа составных частей изделияОбщие сведения
Приводится подробное описание и рассмотрена работа составных частей СКРС «Мегафон».
Описание нестандартных кабелей СКРС «Мегафон» с указанием их характеристик
Оборудование рабочего места
Оборудование рабочего места размещается в пультах диспетчеров и
технического
персонала.
Оборудование
обеспечивает
функционирование речевого терминала для абонента СКРС. В
качестве разговорных устройств используются микрофон пульта,
гарнитура и громкоговорители. В качестве основного устройства
управления используется сенсорный монитор. СМ обеспечивает
индикацию, ввод команд управления радиосвязью и ГГС, а также
пользовательскую настройку ОРМ и другие сервисные функции.
Назначение и состав
В состав ОРМ входит комплект или, если требуется резервирование, дублированный
комплект аппаратуры.
Каждое рабочее место комплектуется оборудованием согласно проекту оснащения,
329.
Обозначение
Вид комплектующих
Комплект ОРМ, в том числе:
1. Источник бесперебойного питания 220В
1. Блок питания 24В
1. Блок пультовых интерфейсов (БПИ), в том
числе
1. Кроссплата БПИ
1. Корпус (крейт 3U)
1. Кабель питания БПИ
1. Микропроцессорный модуль
1. Модуль ввода – вывода
1. Кабель ЛВС
1. Сенсорный монитор (СМ)
1. Кабель СМ – БПИ
1. Блок микрофонный (БМ)
1. Кабель БМ – БПИ
1. Микрофон пультовой
1. Блок гарнитурный (БГ)
1. Кабель БГ – БПИ
1. Гарнитура головная
1. Педаль - тангента
1. Громкоговоритель (ГГ)
1. Кабель ГГ-БПИ
* для конкретных проектов оснащения количество может быть изменено
1.
Количество
1*
1
1
1
1
1
1
1
1
2
1
1
1
1
1
1
1
1
1*
4*
4*
Состав ОРМ
330.
Принцип действия ОРМструктурная схема ОРМ.
ЛВС1
ЛВС2
Блок
пультовых
интерфейсов
модуль ввода - вывода
RS-232 и питание
сенсорного монитора
+24В
микропроцессорный модуль
Громкоговорители
питание +24В
Микрофон
настольный
Сенсорный
монитор
Блок микрофонный
Блок питания +24 В
2 микрофона,
2 динамика
гарнитур и
тангента
Блок
гарнитурный
T
O
L o a d
Педаль - тангента
n
L in e
O
B
e s t
n
S
m
a r t
R
e p l a c e
a t t e r y
B
o o s t
B
a t t e r y
B
a t t e r y
Источник бесперебойного питания ~220В
питание ~220В
331.
Пользователь осуществляет управлениеаппаратурой рабочего места с помощью
сенсорного
монитора,
который
подключается
к
блоку
пультовых
интерфейсов
через
разъем
последовательного порта. Сенсорный
монитор совмещает функции устройства
отображения и устройства ввода команд.
СМ
содержит
отдельный
микрокомпьютер,
обеспечивающий
прорисовку экрана, распознание команд
оператора и ряд сервисных функций.
Микрокомпьютер
СМ
получает
действующую конфигурацию экрана от
МПМ БПИ при каждом перезапуске.
Вариант компоновки рабочего места определяется не только составом
оборудования, но и программной конфигурацией. Например, рабочий
экран ОРМ, предназначенного только для ГГС, не содержит клавиш /
панелей радиосвязи.
ЛВС1
ЛВС2
Блок
пультовых
интерфейсов
модуль ввода - вывода
RS-232 и питание
сенсорного монитора
+24В
микропроцессорный модуль
Громкоговорители
питание +24В
Микрофон
настольный
Блок пультовых интерфейсов собран в
крейте
и
содержит
кроссплату
и
единственный
интерфейсный
модуль,
состоящий из МПМ и модуля ввода-вывода
(IO).
Сенсорный
монитор
Блок микрофонный
Блок питания +24 В
2 микрофона,
2 динамика
гарнитур и
тангента
Блок
гарнитурный
T e s t
O
L o a d
Педаль - тангента
n
L in e
O
n
B a t t e r y
S m
a r t R
B o o s t
e p la c e
B a t t e r y
B a t t e r y
Источник бесперебойного питания ~220В
питание ~220В
МПМ осуществляет обработку звуковой,
служебной и командной информации,
поступающей от внешних устройств и из
локальной вычислительной сети, а также
команд пользователя от сенсорной панели.
Модуль
ввода-вывода
обеспечивает
аналого-цифровое и цифро-аналоговое
преобразования
для
периферийных
устройств:
микрофонов,
громкоговорителей и т.п.
Электропитание ОРМ осуществляется от сети 220В через
ИБП, к которому подключен источник питания 24В. БПИ
подключен к этому источнику кабелем питания.
332.
МПМ непрерывно формирует речевой поток от одного из микрофонов: настольного или гарнитуры. Источникречевого потока может произвольно выбираться оператором рабочего места.
В зависимости от источника и команд пользователя пакеты данных снабжаются соответствующими заголовками и
передаются в ЛВС.
Одновременно МПМ читает из ЛВС пакеты, переданные другими станциями системы. Просматриваются заголовки
принятых пакетов. Если это пакет телефонной связи и предназначен для данной станции, он направляется через МВИ на
громкоговоритель ГГС или на телефон гарнитуры. Устройство – получатель пакетов телефонной связи может оперативно
выбираться пользователем.
Блок пультовых интерфейсов Общее устройство
Блок пультовых интерфейсов (БПИ) используется для размещения и сопряжения модулей, а также для
подключения к ним через разъемы кроссплаты линий ЛВС, периферийных устройств и сенсорного монитора. Аппаратура
выполнена в унифицированном блоке, включающем:
корпус;
МПМ
Лицевая панель БПИ
кроссплату;
микропроцессорный модуль (МПМ);
модуль ввода-вывода (МВВ).
Кроссплата предназначена
для распределения сигналов и цепей
питания между модулями. Она
содержит внутренние разъемы для
модулей БПИ и разъемы для
внешних подключений.
CTRL
LINK1
ACT1
LINK2
ACT2
MPU
МВВ
IO
Кроссплата крепится в задней части корпуса. Остальные устройства выполнены в виде типовых
модулей (печатных плат с фальшпанелью с лицевой стороны и разъемом с обратной стороны) и
вдвигаются внутрь блока с лицевой стороны по специальным направляющим (рис). При этом
разъемы модулей стыкуются с ответными разъемами на кроссплате.
333.
ЛВС1ЛВС2
Функциональная схема БПИ
Блок
пультовых
интерфейсов
модуль ввода - вывода
RS-232 и питание
сенсорного монитора
+24В
микропроцессорный модуль
Громкоговорители
питание +24В
Микрофон
настольный
Сенсорный
монитор
Блок микрофонный
ЛВС 1
Блок питания +24 В
2 микрофона,
2 динамика
гарнитур и
тангента
ЛВС 2
Блок
гарнитурный
микрофон пультовой
громкоговоритель 1
микрофон гарнитуры 1
громкоговоритель 2
микрофон гарнитуры 2
громкоговоритель 3
педаль - тангента
громкоговоритель 4
телефон гарнитуры 1
T e s t
O
L o a d
Педаль - тангента
n
L in e
O
B
n
S
m
a r t
R
e p la c e
a t t e r y
B
o o s t
B
a t t e r y
B
a t t e r y
Источник бесперебойного питания ~220В
телефон гарнитуры 2
питание ~220В
аналог.выход на магнитофон 1
аналог.выход на магнитофон 2
LAN 0
LAN 1
Контроллер внешнего
интерфейса
Микропроцессор
COM
на сенсорный
монитор
HSS
HSS
МПМ
МВВ
Out
In
шина питания
+24 В
334.
Модули БПИЛВС 1
ЛВС 2
микрофон пультовой
громкоговоритель 1
микрофон гарнитуры 1
громкоговоритель 2
микрофон гарнитуры 2
громкоговоритель 3
педаль - тангента
громкоговоритель 4
телефон гарнитуры 1
Основные функциональные компоненты
БПИ – микропроцессорный модуль (МПМ)
и модуль ввода-вывода (МВВ).
телефон гарнитуры 2
аналог.выход на магнитофон 1
аналог.выход на магнитофон 2
LAN 0
LAN 1
Контроллер внешнего
интерфейса
Микропроцессор
COM
на сенсорный
монитор
HSS
HSS
МПМ
МВВ
Out
In
МВВ содержит набор интерфейсов
внешних устройств. Он выполнен в
виде отдельной платы и имеет
внешние входные и выходные
линии аналоговых и цифровых
сигналов.
МВВ
обеспечивает
аналого-цифровое
преобразование
речевых
сигналов
с
микрофонов,
а
также
цифро-аналоговое
преобразование сигналов для вывода на
громкоговорители, телефоны и в линии записи
(на магнитофон). МВВ имеет порт HSS для
обмена данными и командами с МПМ.
АЦП/ЦАП осуществляет кодек (кодер/декодер)
контроллера
внешнего
интерфейса,
построенный
на
базе
телефонного
микропроцессора Altera.
шина питания
+24 В
Кодеки имеют следующие технические характеристики:
частота дискретизации:
8000 Гц;
дискретность оцифровки: 8 бит;
метод преобразования сигнала: импульсно-кодовая модуляция (ИКМ, закон А) в соответствии со стандартом МСЭ-Т
(МККТТ) серии G703.
МПМ организует работу БПИ. МПМ построен на базе коммуникационного процессора Intel IXP425 с интегрированными интерфейсами
ввода-вывода. При этом 2 интерфейса Ethernet 10/100 (LAN 0 и LAN 1) используются для подключения к дублированной ЛВС
СКРС «Мегафон», COM порт обеспечивает обмен с сенсорным монитором, а высокоско-ростной интерфейс HSS (high speed serial)
связывает МПМ с модулем ввода-вывода пуль-товых устройств.
335.
Речевые сигналы в виде отсчетов PCM (ИКМ) и сигналы управления передаются между портами HSS в обоих направлениях черезцепи кроссплаты по линиям данных In и Out. Информация по линиям данных передается в последовательном коде.
Мультиплексирование обеспечивается по протоколу TDM (time-division multiplexed). При этом обеспечивается общая пропускная
способность 2 Мбит/с, а на каждый аналоговый канал 64 Кбит/с.
МПМ оснащен запоминающим устройством типа Flash Memory. В нем выделены две области. Первая защищена атрибутом RO
(только для чтения) и содержит файлы операционной системы и исполняемые файлы прикладного ПО. Во второй области
размещаются обновляемые файлы конфигурации СКРС «Мегафон».
Кроссплата БПИ обеспечивает связь устройств БПИ между собой, а также с внешними
устройствами. Кроссплата закреплена в задней части БПИ. Разъемы Х1 и Х2, расположенные на
внутренней стороне кроссплаты предназначены для подключения модулей МПМ и МВВ.
Кроссплата БПИ
Внешние разъемы кроссплаты служат для
подключения устройств ввода/вывода пульта,
кабелей ЛВС, а также питания.
Внешние разъемы кроссплаты БПИ
Х3 - технологический COM порт;
Х4 - разъем (розетка) ЛВС 1;
Х5 - разъем (розетка) ЛВС 2;
Х6 - разъем COM порта подключения сенсорной
панели;
Х7–Х10 - разъемы громкоговорителей 1-4;
Х11 – разъем подключения гарнитурного блока;
Х12 - разъем
магнитофон;
Х13 - разъем настольной тангенты (опция);
Х14 - разъем подключения микрофонного блока;
Х15 - разъем питания +24В;
S1-S4 – селекторы установки адреса.
аналоговых
выводов
на
336.
ЛВС1ЛВС2
Блок
пультовых
интерфейсов
модуль ввода - вывода
RS-232 и питание
сенсорного монитора
+24В
микропроцессорный модуль
Громкоговорители
питание +24В
Микрофон
настольный
Сенсорный
монитор
Блок микрофонный
Блок питания +24 В
2 микрофона,
2 динамика
гарнитур и
тангента
Блок
гарнитурный
T e s t
L o a d
Педаль - тангента
O n
O n
L in e
B a tte ry
S m a r t R e p la c e
B o o s t
B a tte ry B a tte ry
Источник бесперебойного питания ~220В
питание ~220В
Х3 - технологический COM порт;
Х4 - разъем (розетка) ЛВС 1;
Х5 - разъем (розетка) ЛВС 2;
Х6 - разъем COM порта подключения сенсорной панели;
Х7–Х10 - разъемы громкоговорителей 1-4;
Х11 – разъем подключения гарнитурного блока;
Х12 - разъем аналоговых выводов на магнитофон;
Х13 - разъем настольной тангенты (опция);
Х14 - разъем подключения микрофонного блока;
Х15 - разъем питания +24В;
S1-S4 – селекторы установки адреса
337.
К разъему Х6 подключается кабель СМ-БПИ,предназначенный для обмена сигналами с
сенсорным монитором, а также питания СМ.
Тип разъема: DB 9F (гнезда)
Нумерация контактов показана в таблице.
Нумерация контактов разъема Х6
Контакт №
Обозначение
Сигнал
1
6 Общ.
2
RXD
7 Общ.
3
TXD
8 Общ.
4
+ 24 В
9 Общ.
5
+ 24 В
Общий
Rx контроллера
Общий
Tx контроллера
Общий
Питание + 24 В
Общий
Питание + 24 В
Разъем Х14 предназначен для подключения
кабеля БМ-БПИ (блока микрофонного).
Тип разъема: DB 9F (гнезда)
Контакт
№
Обозначение
Сигнал
1
2
3
(-) МКФ
Экран
(+) МКФ
Выход микрофона (-)
Экран
Выход микрофона (+)
Разъем Х11предназначен для подключения кабеля БГ-БПИ (блока
гарнитурного).
Тип разъема: DB 25F (гнезда)
Нумерация контактов разъема Х11
Контакт № Обозначение
Сигнал
1
Экран МКФ ГРН 1 Экран микрофона гарнитуры 1
14 (-) МКФ ГРН 1
Выход микрофона гарнитуры 1(-)
2
Экран МКФ ГРН 1 Экран микрофона гарнитуры 1
15 Экран ТЛФ ГРН 1
Экран телефона гарнитуры 1
3
(-) ТЛФ ГРН 1
Вход телефона гарнитуры 1(-)
16 (+) ТЛФ ГРН 1
Вход телефона гарнитуры 1(+)
Общий ТАНГ ГРН Общий тангенты гарнитуры 1
4
1
17
(НР) ТАНГ ГРН 2
Норм.
разомкнутый
тангенты
5
гарнитуры 2
18 Экран МКФ ГРН 2 Экран микрофона гарнитуры 2
6
(-) МКФ ГРН 2
Выход микрофона гарнитуры 2(-)
19 Экран МКФ ГРН 2 Экран микрофона гарнитуры 2
7
Экран ТЛФ ГРН 2
Экран телефона гарнитуры 2
20 (-) ТЛФ ГРН 2
Вход телефона гарнитуры 2(-)
8
(+) ТЛФ ГРН 2
Вход телефона гарнитуры 2(+)
Общий ТАНГ ГРН Общий тангенты гарнитуры 2
21
2
9
(НР) ТАНГ ГРН 1
Норм.
разомкнутый
тангенты
22
гарнитуры 1
Общий
НОЖН Общий педали-тангенты
10
ТАНГ
23
11
(НР) НОЖН ТАНГ Норм. разомкнутый педали-тангенты
24
12
25
13
338.
Разъемы Х7-Х10 предназначены для подключения кабелей ГГ-БПИ (громкоговорителей).Тип разъема: DB 9F (гнезда)
Нумерация контактов показана в таблице.
Нумерация контактов разъема громкоговорителя
Контакт №
1
6
2
7
3
8
4
9
5
Обозначение
SC
Общ.
SD
Общ.
AO
Общ.
+ 24 В
Общ.
+ 24 В
Сигнал
Цифровой вход 1
Экран цифровой
Цифровой вход 2
Общий
Аналоговый вход (звук)
Экран аналоговый
Питание + 24 В
Общий
Питание + 24 В
Разъемы Х4,Х5 предназначены для подключения микропроцессорных модулей БПИ к дублированной
ЛВС. К разъемам подключается кабель ЛВС.
Тип разъема RJ-45 (розетка).
Нумерация контактов соответствует стандарту EIA-T586B.
Нумерация контактов разъема ЛВС
Контакт №
Обозначение
Цвет провода
1
пара 2B
Бело-зелёный
2
пара 2А
Зелёный
3
пара 3B
Бело-оранжевый
4
пара 1А
Синий
5
пара 1B
Бело-синий
6
пара 3А
Оранжевый
7
пара 4B
Бело-коричневый
8
пара 4А
Коричневый
Схема
Пара 1
Пара 2
Пара 3
Пара 4
12345678
339.
Разъем Х12 обеспечивает подключение приемников (магнитофонов) к двум аналоговым выводам нааппаратуру документирования.
Тип разъема S2L3.5/6/180F (гнезда).
Нумерация контактов разъема ЛВС
Схема
Обозначение
Назначение
Номер порта БПИ
Аналог. вывод 1
18
Аналог. вывод 2
26
пара 1А
пара 1B
общий
общий
пара 2А
пара 2B
Разъём Х15 предназначен для подачи на БПИ внешнего питания. К разъёму подключается кабель
питания БПИ.
Тип разъёма: DB9 M (штыри).
Контакт №
Обозначение
Назначение
1
0
Корпус
2
0
Корпус
3
0
Корпус
4
0
Корпус
5
0
Корпус
6
+12В
Питание +12В
7
+12В
Питание +12В
8
+12В
Питание +12В
9
+12В
Питание +12В
Нумерация контактов разъема питания
340.
Сенсорный мониторСенсорный монитор подключается к БПИ. Он выполняет одновременно функции устройства
отображения и устройства ввода.
В зависимости от режима работы системы, на экране отображаются различные элементы
пользовательского интерфейса. Управление осуществляется путем нажатия в определенной точке
сенсорной панели, соответствующей управляющему элементу (кнопке, закладке, элементу списка и т.
п.). Сенсорная панель автоматически определяет координаты точки нажатия и передает их в
компьютер, который осуществляет привязку команды к элементу интерфейса, отображаемому в
точке нажатия и отработку команды.
Панель может поставляться в двух вариантах корпуса:
для врезки в столешницу пульта;
для размещения на столешнице.
341.
Состав панели управленияПосле включения питания всех устройств и загрузки программного обеспечения компьютера на
экране сенсорной панели появляется окно панели управления.
Панель разделена на три основных зоны.
Слева
расположена
зона
функциональных
клавиш,
предназначенных для активизации
различных
режимов
работы.
В
верхней части зоны функциональных
клавиш
находятся
индикаторы
режимов, системные часы и поле
имени рабочего места.
Справа находится зона радиосвязи, состоящая из одной или нескольких
панелей клавиш радиосвязи.
В нижней части экрана расположены (слева на право): клавиша отбоя «End»,
панель вызовов, групповая тангента радиосвязи.
В
центре
расположена
зона
телефонной связи, состоящая из
одной
или
нескольких
панелей
адресных
клавиш.
Переключение
между панелями осуществляется с
помощью кнопок в верхней части
зоны.
Одна
из
панелей
зоны
телефонной связи предназначена для
осуществления косвенного вызова
абонентов (через номеронабиратель).
При
активизации
специальных
режимов настроек на месте зоны
телефонной
связи
включаются
специальные дополнительные панели.
Дополнительные
панели
автоматически
закрываются
по
истечении таймаута, длительность
которого задаётся администратором
при конфигурировании системы.
342.
В верхней части зоны функциональных клавиш находятсясистемные часы, поле, отображающее имя рабочего места (на
рисунке – РПА) и индикаторы режимов.
Зона функциональных клавиш
Индикатор активности настольного микрофона
Индикатор активности микрофона гарнитуры
Индикатор режима двух гарнитур
Индикатор активности микрофона микротелефонной трубки
Индикатор аварийной ситуации
Индикатор записи на рабочем месте (в режиме краткосрочного документирования)
Индикатор режима, который в настоящий момент активен, подсвечивается зелёным цветом.
Индикатор аварийной ситуации включается, при обнаружении неисправности в процессе самодиагностики
рабочего места.
343.
В средней части панели расположены клавиши, предназначенные для активизации различных режимовработы.
«Справка»
– клавиша вызова подсказок.
«Оп. вызов»
– клавиша включения оперативного вызова.
«Экстр.громкость»
– при удержании данной клавиши громкость принимаемых сигналов
автоматически повышается до максимального уровня.
«Доб. Прм.»
– включение прослушивания собственных приемников для другого абонента
СКРС «Мегафон».
«Контроль»
– включение прослушивания всех переговоров другого абонента СКРС
«Мегафон».
«Конференция»
– включение режима конференц-связи.
«Перевод»
– переадресация всех входящих вызовов на другого абонента.
«Переадресация»
– переадресация текущего вызова (соединения) на другого абонента.
«Подбор»
– клавиша подбора вызова.
«Вторжение»
– вхождение в связь к абоненту, занятому другим соединением.
«Отклонение»
– отбой входящего вызова до установления соединения.
«Удержание»
– клавиша перевода установленной связи в режим удержания.
– клавиша «Быстрая телефонная трубка» для выбора микрофона и
динамика трубки в качестве устройств для телефонной связи (для
радиосвязи
будут
использоваться
настольный
микрофон
и
громкоговорители).
Данная
клавиша
дублирует
аналогичную,
расположенную на панели «Настройки».
344.
В нижней части панели находятся клавиши вызова панелей настройки, а также дополнительных панелейинтерфейса рабочего места:
«Настройки»
«Радио»
«ГГС»
«SELCAL»
«КДРМ»
– вызов панели общих настроек.
– вызов панели основных настроек радиосвязи.
– вызов панели настроек телефонной связи.
– вызов панели селективного вызова по радиосвязи.
– вызов панели управления краткосрочным документированием.
Зона телефонной связи
Основной вид зоны телефонной связи: панель прямого доступа к абонентам,
Панель содержит адресные клавиши, на каждой из которых отображается имя абонента.
Зона телефонной связи может иметь несколько панелей прямого доступа. Клавиши выбора панелей (на рисунке 2.2 – «ПД 1»,
«ПД 2») расположены в верхней части зоны телефонной связи. Здесь же находится также клавиша выбора панели косвенного
доступа («Набор»).
Индикация текущего состояния абонента осуществляется изменением вида (цвета)
адресной клавиши.
Цвет
Зелёный
Зелёный
Состояние
Отжата
Нажата
Серый
Отжата
Красный
Отжата
Переключение
синий/ Отжата
зелёный
Переключение желтый/ Нажата
зеленый
Переключение красный/ Нажата
зелёный
Переключение красный/ Отжата
зелёный
Желтый
Отжата
Состояние абонента (связи)
Свободен
Установлено соединение с абонентом
(исходящее симплексное или дуплексное)
Не доступен
Занят
Входящий вызов со стороны абонента
Абонент находится в режиме удержания
Данное рабочее место находится в режиме
удержания со стороны абонента
Входящий вызов к абоненту от другого
рабочего места
Исходящий вызов к абоненту
Установка связи с абонентом прямого доступа осуществляется нажатием на адресную
клавишу.
345.
Зона радиосвязиЗона радиосвязи содержит одну или несколько панелей клавиш радиосвязи, а также клавишу «Групповая
тангента». Переключение между панелями осуществляется с помощью клавиш («Р1», «Р2») в верхней части
панели.
Название для каждого радиоканала
задаётся администратором системы
при конфигурировании.
Используемый комплект
приёмника
Используемый комплект
передатчика
Частота
Признак ретрансляции
T
Название
радиоканала
Номер аудиоколонки
Признак
привязки
(в
поле
отображается символ «Т») означает, что
при нажатии на ножную педаль –
тангенту эта клавиша «срабатывает».
Номер аудиоколонки показывает,
через какой из громкоговорителей
воспроизводится сигнал от данной
группы. Если используются наушники
гарнитуры,
отображается
соответствующий символ.
Признак привязки
основной механической
тангенты
Строка индикации специальных функций
В поле признака ретрансляции символами отображается установленный режим ретрансляции речевого
сигнала с частоты на частоту:
- частичная (принятый сигнал передается только диспетчеру).
- полная (принятый сигнал передается как диспетчеру, так и в эфир на другой частоте).
346.
Индикация состояния радиоканала осуществляется цветом клавиши или её отдельных элементов.Цвет клавиши
Зелёный
Красный
Синий
Желтый
Серый,
цвет
текста – белый
Серый,
цвет
текста–красный
Серый
или
желтый, поле
частоты - синий
Зеленый
или
желтый, строка
специальных
функций- синий
Режим работы канала
Состояние радиоканала или канала
прослушивания
Управление включено, Радиоканал свободен
приём включен
Управление включено, Радиоканал занят, другой абонент СКРС
приём включен
«Мегафон» работает на передачу
Управление включено, Наличие сигнала (несущей)
приём включен
Управление
Канал работает только на приём (канал
выключено,
приём прослушивания)
включен
Управление
Канал отключен
выключено,
приём
выключен
Управление
Канал не доступен
выключено,
приём
выключен
Управление
Наличие сигнала (несущей)
выключено, приём – не
существенно
Прием
включен, Приемник данного канала определен как
управление
–
не наилучший в группе
существенно
Красный цвет текста в поле
«Частота» указывает, что
данный
радиоканал
включен на единственном
рабочем
месте.
Его
отключение
будет
заблокировано.
Данная
сигнализация работает при
включенной опции «Запрет
удаления
последней
станции».
Клавиша
«Тангента»
включает на передачу все
радиостанции, включенные
на управление. Клавиша
«Тангента», как и любая
клавиша радиосвязи, может
быть привязана к ножной
тангенте. В этом случае на
клавише
отображается
символ «Т».
В строке индикации специальных функций отображаются состояния для радиостанций, объединенных в группу по частоте:
«ВЛ Прм» – включен режим автоматического выбора лучшего приемника.
«АВ Прд» – включен автоматический выбор передатчика.
«Все Прд» – включено групповое срабатывание передатчиков.
Если за клавишей не закреплен ни один радиоканал, клавиша свободна. Свободные клавиши радиосвязи не содержат
информации.
347.
На рисунке показан СМ в корпусе для врезки в столешницу пульта. Слева от экрана размещенвыключатель питания СМ. Справа вверху – регулятор наклона панели.
СМ содержит отдельный микрокомпьютер, обеспечивающий прорисовку экрана, распознание
команд оператора и ряд сервисных функций.
Микрокомпьютер СМ построен на базе серийного процессора и работает под управлением ОС Linux.
Микрокомпьютер оснащен НЖМД (диск), на котором размещена операционная система, ПО СМ, в том числе
файлы конфигурации экрана и файлы пользовательских настроек ОРМ.
348.
Назначение:Разъем подключения СМ
кроссплаты БПИ
Назначение:
Разъем сенсорного
монитора
Кабель сенсорного монитора
Применение: СМ - БПИ.
X6
Конт. Сигнал
X1
Цвет провода
Конт. Сигнал
Цвет провода
2
Rx контролл.
зеленый
3
Rx контролл.
зеленый
3
Tx контролл.
оранжевый
2
Tx контролл.
оранжевый
4
+24 В
синий
5
+24 В
коричневый
4
+24 В
синий,
коричневый
6
Общий
бело-зелен.
7
Общий
бело-оранж.
8
Общий
бело-синий
Общий
9
Общий
бело-коричн.
бело-зелен.
бело-оранж.
бело-синий
бело-коричн.
Корп. Общий
1, 5
экран
Корп. Общий
Тип:
Тип кабеля: витая пара 5 категории.
Длина кабеля: 4,5 м.
DB-9M (штыри)
пайка
экран
Тип:
DB-9F (гнезда)
пайка
Микрокомпьютер СМ осуществляет непрерывный обмен информацией с МПМ БПИ по последовательному
интерфейсу RS-232. СМ подключается к разъему Х6 кроссплаты БПИ кабелем СМ-БПИ, через который
осуществляется как передача информации, так и питание +24В
Контакт №
1
6
2
7
3
8
4
9
5
Обозначение
Общ.
Сигнал
Общий
TXD
Tx контроллера
RXD
Rx контроллера
+ 24 В
Питание + 24 В
Общ
Общий
Нумерация контактов разъема СМ
349.
При отключении или перезапуске МПМ сенсорный монитор блокируется и находится в режимеожидания. Микрокомпьютер СМ получает действующую конфигурацию экрана от МПМ БПИ при
каждом перезапуске ПО СМ.
При замене СМ выполнения настроечных операций не требуется.
В СКРС «Мегафон» используются сенсорные
панели
со
следующими
техническими
характеристиками:
•разрешающая способность:
не хуже 640Х480;
•размер точки:
0,125 Х 0,125’;
•размер экрана:
10,4’ по диагонали;
•цветовое разрешение:
262144;
•яркость: не менее 285 кд/м2;
•соотношение контрастности:
не хуже 300 : 1;
•время реакции:
не более 20 мс;
•время активизации при включении:
не более 50 мс;
•углы обзора:
•горизонтальный:
+/- 70 (всего 140 );
•вертикальный:
+70 /- 40 (всего 110 ).
Система «Мегафон» допускает подключение до 4 громкоговорителей на одно
недублированное рабочее место. Громкоговорители подключаются к разъемам
Х7-Х10 на внешней стороне кроссплаты БПИ кабелем ГГ-БПИ
Громкоговорители
Громкоговоритель выполнен в металлическом корпусе. Динамик выведен на лицевую панель, здесь же
расположены жидкокристаллический цифровой индикатор, кнопка включения питания и ручка регулировки
громкости. На задней панели громкоговорителя расположен входной разъем (X1.SI), к которому подключается
кабель от разъема выходного порта кроссплаты. Внутри громкоговорителя расположена плата усилителя
мощности.
350.
Назначение:Разъем подключения ГГ
кроссплаты БПИ
Кабель колонки
Применение: ГГ - БПИ
Назначение:
Разъем
громкоговорителя
X7-X10
X1
SC
1
1
SC
Экран цифр.
6
6
Экран цифр.
SD
2
2
SD
Общий
7
7
Общий
Звук (аналог.)
3
3
Звук (аналог.)
Экран аналог.
8
8
Экран аналог.
+24 В
4
4
+24 В
Общий
9
9
Общий
+24 В
5
5
+24 В
Тип:
Тип кабеля: КМ-2.
Длина кабеля: 4,5 м.
Контакты 4 и 5 объединить.
Контакты 6, 7, 8, 9 объединить.
DB-9M (штыри)
пайка
Контакт №
1
6
2
7
3
8
4
9
5
Обозначение
SC
Общ.
SD
Общ.
AO
Общ.
+ 24 В
Общ.
+ 24 В
Тип:
DB-9F (гнезда)
пайка
Сигнал
Цифровой вход 1
Экран цифровой
Цифровой вход 2
Общий
Аналоговый вход (звук)
Экран аналоговый
Питание + 24 В
Общий
Питание + 24 В
Нумерация контактов разъема громкоговорителя
Индикатор
отражает
номер
громкоговорителя,
который жестко привязан к номеру выходного канала,
а
также
наименование
источника
звука,
воспроизводимого через этот громкоговоритель
(например, частоту радиостанции).
351.
Блок микрофонныйБлок предназначен для подключения микрофона пультового и устанавливается в столешницу пульта.
Блок имеет девятиконтактный разъем (X1.JI), к которому подключается кабель БМ-БПИ от разъема
Х14 кроссплаты БПИ
Назначение:
Разъем подключения БМ
кроссплаты БПИ
Кабель микрофонный
Применение: БМ – БПИ.
Назначение:
Разъем блока
микрофонного
X14
X1
Экран
2
1
Экран
(+) МКФ
3
6
(+) МКФ
(-) МКФ
1
2
(-) МКФ
7
Тип:
SMS 3 PDH (гнезда)
пайка
Тип кабеля: КМ-2.
Длина кабеля: 4,5 м.
3
8
4
Контакт №
1
6
2
7
3
8
4
9
5
Обозначение
Экран
(-) МКФ
(+) МКФ
Сигнал
Экран
Выход микрофона (-)
Выход микрофона (+)
9
5
Нумерация контактов БМ
Тип:
DB-9F (гнезда)
пайка
Стандартный микрофон подключается к блоку с помощью специального гибкого переходника.
Блок используется также для подключения лампы настольного освещения пульта.
352.
Блок предназначен для подключения двух головных гарнитур и педали–тангенты.Вместо гарнитуры 2 может быть подключена микротелефонная трубка. БГ
устанавливается в столешницу пульта.
Блок гарнитурный
Блок имеет двадцатипятиконтактный разъем (X1.JI), к которому подключается кабель БГ-БПИ от
разъема Х11 кроссплаты БПИ
Назначение:
Назначение:
Конта
кт №
1
14
2
15
3
16
4
17
Сигнал
Экран МКФ ГРН 1
(-) МКФ ГРН 1
Экран МКФ ГРН 1
Экран ТЛФ ГРН 1
(-) ТЛФ ГРН 1
(+) ТЛФ ГРН 1
Общий ТАНГ ГРН 1
Экран микрофона гарнитуры 1
Выход микрофона гарнитуры 1(-)
Экран микрофона гарнитуры 1
Экран телефона гарнитуры 1
Вход телефона гарнитуры 1(-)
Вход телефона гарнитуры 1(+)
Общий тангенты гарнитуры 1
(НР) ТАНГ ГРН 2
5
18 Экран МКФ ГРН 2
(-) МКФ ГРН 2
6
Экран МКФ ГРН 2
19
Экран ТЛФ ГРН 2
7
20 (-) ТЛФ ГРН 2
(+) ТЛФ ГРН 2
8
21 Общий ТАНГ ГРН 2
9
(НР) ТАНГ ГРН 1
22
Общий НОЖН ТАНГ
10
Разъем подключения БГ
кроссплаты БПИ
Обозначение
Норм. разомкнутый тангенты
гарнитуры 2
Экран микрофона гарнитуры 2
Выход микрофона гарнитуры 2(-)
Экран микрофона гарнитуры 2
Экран телефона гарнитуры 2
Вход телефона гарнитуры 2(-)
Вход телефона гарнитуры 2(+)
Общий тангенты гарнитуры 2
Норм. разомкнутый тангенты
гарнитуры 1
Общий педали-тангенты
11
Норм.
разомкнутый
тангенты
13
X1
1
(-) МКФ ГРН 1
14
14 (-) МКФ ГРН 1
(+) МКФ ГРН 1
2
2 (+) МКФ ГРН 1
Экран ТЛФ ГРН 1
15
15 Экран ТЛФ ГРН 1
(-) ТЛФ ГРН 1
3
3 (-) ТЛФ ГРН 1
(+) ТЛФ ГРН 1
16
16 (+) ТЛФ ГРН 1
Общ ТАНГ ГРН 1
1 Экран МКФ ГРН 1
4
4 Общ ТАНГ ГРН 1
17
17
(НР) ТАНГ ГРН 2
5
5 (НР) ТАНГ ГРН 2
Экран МКФ ГРН 2
18
18 Экран МКФ ГРН 2
(-) МКФ ГРН 2
6
6 (-) МКФ ГРН 2
(+) МКФ ГРН 2
19
19 (+) МКФ ГРН 2
Экран ТЛФ ГРН 2
7
7 Экран ТЛФ ГРН 2
(-) ТЛФ ГРН 2
20
20 (-) ТЛФ ГРН 2
(+) ТЛФ ГРН 2
8
8 (+) ТЛФ ГРН 2
Общ ТАНГ ГРН 2
21
21 Общ ТАНГ ГРН 2
9
9
(НР) ТАНГ ГРН 2
22
22 (НР) ТАНГ ГРН 2
Общ ножной ТАНГ
10
10 Общ ножной ТАНГ
23
23
11
11 (НР) ножной ТАНГ
24
24
12
12
25
25
(НР) ножной ТАНГ
педали-
13
Тип:
25
Применение: БГ - БПИ.
Экран МКФ ГРН 1
24
12
Кабель гарнитурного блока
X11
23
(НР) НОЖН ТАНГ
Разъем блока
гарнитур
Тип кабеля: (КМ-2)х4, (МГШВ 0,35)х3.
Длина кабеля: 4,5 м.
DB-25M (штыри)
пайка
13
Тип:
DB-25F (гнезда)
пайка
Нумерация контактов БГ
353.
В состав ОРМ входят покупные изделия:микрофон;
гарнитура;
педаль–тангента.
Интерфейсное оборудование
Назначение и состав
Интерфейсное
оборудование
предназначено
радиоканалов и внешних абонентов СКРС.
Прочее оборудование
для
подключения
ИО построено по модульному принципу, что обеспечивает лёгкость
переконфигурирования и наращивания аппаратуры.
Обозн
ачение
Вид комплектующих
Количество
1*
1
1
1
8*
1
1
1
6
6-12**
1
1. Комплект ИО, в том числе:
1.1. Шкаф монтажный 19”
1.2. Блок электрический распределительный
1.3. Источник бесперебойного питания 24В
1.4. Блок внешних интерфейсов (БВИ), в том числе:
1.4.1. Кроссплата БВИ
1.4.2. Корпус (крейт 3U)
1.4.3. Кабель питания БВИ
1.4.4. Микропроцессорный модуль
1.4.5. Модуль внешнего интерфейса
1.5. Устройство кроссировки и коммутации (УКК), в
том числе:
1.5.1. Внутренний кроссовый блок
1
1.5.2. Внешний кроссовый блок
1
1.5.3. Кабель кросс – БВИ
96
* для конкретных проектов оснащения количество может быть изменено
** в зависимости от используемых модулей внешних интерфейсов
ИО состоит
из комплекта
блоков
внешних
интерфейсов
и устройства
кроссировки
и коммутации
(УКК).
Интерфейсное оборудование (ИО) смонтировано в шкафу группового
оборудования (ГО), который располагается в техническом помещении.
354.
План размещения аппаратуры в шкафу ГОПринцип действия ИО
CTRL
CTRL
LINK1
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
D3
CTRL
LINK1
D3
MPU
D3
D3
MPU
D3
D3
MPU
UI
MPU
ACT1
ACT2
D3
MPU
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
D3
D3
MPU
CTRL
D3
D3
MPU
D3
D3
MPU
D3
D3
MPU
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
UI
MPU
CTRL
D3
D3
MPU
CTRL
D3
D3
MPU
D3
MPU
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
UI
MPU
UI
MPU
UI
MPU
UI
ACT1
ACT2
MPU
ACT1
ACT2
MPU
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
CTRL
CTRL
LINK1
MPU
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
UI
MPU
UI
MPU
UI
MPU
UI
UI
LINK1
ACT1
ACT2
UI
MPU
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
ACT2
LINK2
ACT2
LINK2
ACT2
БВИ 6
LINK2
MPU
LINK1
LINK2
БВИ 5
UI
Для обеспечения потребителей постоянного тока применяется
источник бесперебойного питания 24В (ИБП 24В). ИБП 24В и БЭР
размещены в нижней части шкафа ГО
CTRL
ACT1
ACT2
UI
MPU
CTRL
LINK2
БВИ 4
LINK2
UI
ACT1
UI
Каждый БВИ получает питание 24В от блока электрического
распределительного (БЭР), через выделенный автомат защиты
LINK1
MPU
CTRL
MPU
UI
Блоки внешних интерфейсов собираются в 19” крейтах и
размещаются в верхней ча-сти шкафа ГО. Они нумеруются сверху
вниз с БВИ 1 по БВИ 8..
CTRL
LINK1
UI
БВИ 3
LINK2
D3
ACT2
MPU
БВИ 2
LINK1
D3
LINK2
UI
D3
CTRL
ACT1
MPU
D3
ACT2
MPU
CTRL
UI
D3
ACT1
D3
LINK1
MPU
D3
LINK2
D3
CTRL
D3
БВИ 1
LINK2
D3
UI
Структурная схема аппаратуры ИО
БВИ 7
LINK2
ACT2
ACT2
Внутренний кроссовый блок
БВИ 1
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
LINK1
LINK1
ACT1
LINK1
ACT1
LINK2
LINK1
ACT1
LINK2
ACT2
LINK1
ACT1
LINK2
ACT2
LINK1
ACT1
LINK2
ACT2
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
D3
MPU
D3
D3
D3
MPU
D3
D3
MPU
D3
D3
LINK2
ACT2
MPU
UI
MPU
1-1-1
ACT2
D3
D3
MPU
D3
D3
HPSµV
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
D3
D3
MPU
D3
D3
MPU
UI
MPU
UI
MPU
UI
MPU
БВИ 2
HPSµV
Rectifier
HPSµV
Rectifier
D3
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
D3
MPU
D3
D3
MPU
D3
D3
MPU
D3
D3
MPU
D3
D3
MPU
D3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
1-1-1
1-1-1
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
2
3
4
1
2
4
1
2
3
4
1
2
1-1-1
3
4
1
2
1-1-1
3
4
1
2
1-1-1
3
4
1-1-1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1-1-1
БВИ 3
3
1-1-1
1
1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
Блок электрический распределительный
CTRL
Переключатель
вводов
Ввод I
Ввод II
220В
потреб.1
220В
потреб.2
220В
потреб.3
220В
потреб.4
24В
потреб.5
24В
потреб.6
24В
потреб.7
24В
потреб.8
24В
потреб.9
24В
потреб.10
24В
потреб.11
24В
потреб.12
24В
потреб.13
24В
потреб.14
24В
потреб.15
24В
потреб.16
Ввод 2
Коммутаторы ЛВС 1
3
3
1-1-1
1-1-1
1-1-1
3com
2
D3
D3
Ввод 1
2
1
1-1-1
1-1-1
БЭР
2
1
4
1-1-1
1-1-1
1
Питание
~220 В
2
1
4
3
1-1-1
1-1-1
D3
2
1
4
3
1-1-1
1-1-1
CTRL
LINK1
MPU
2
1
4
3
1-1-1
1-1-1
Rectifier
БВИ 8
2
1
4
3
1-1-1
1-1-1
HPSµV
Rectifier
2
1
4
3
1-1-1
1-1-1
Rectifier
1
4
3
1-1-1
1-1-1
HPSµV
4
3
1-1-1
1-1-1
ИБП +24 В
3
1-1-1
ACT1
LINK2
ACT2
1-1-1
MPU
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
UI
MPU
LINK1
CTRL
ACT1
MPU
На вентиляторы шкафа ГО
CTRL
D3
D3
MPU
D3
D3
MPU
D3
D3
MPU
LINK1
D3
D3
MPU
UI
БВИ 4
Внешний кроссовый блок
3com
CTRL
M G E
PUL S A R
Ev o l u t i o n
UPS S Y S T EMS
500
3com
ИБП ЛВС 1
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
LINK1
UI
MPU
UI
1
2
1
2
3
4
1
2
3
4
1
2
1-1-1
Коммутаторы ЛВС 2
1
2
1
2
PUL S A R
Ev o l u t i o n
UPS S Y S T EMS
500
1
2
1
2
4
1
2
4
1
2
ИБП ЛВС 2
2
2
4
1
2
4
1
2
БВИ 5
1
2
1
2
4
1
2
4
1
2
1
2
2
3
4
1
2
3
4
1
2
M G E
UPS
500
S Y S T EMS
M G E
PUL S A R
Ev o l u t i o n
UPS
500
S Y S T EMS
ИБП ЛВС 1
ИБП ЛВС 2
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1
2
2
3
4
1
2
3
4
1
2
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
1
2
1
2
3
4
1
2
3
4
1
2
1
2
1
2
3
4
1
2
3
4
1
2
Коммутатор ИО
1
2
1
2
3
4
1
2
3
4
1
2
1
2
1
2
БВИ 6
1
2
1
2
3
4
1
2
3
4
1
2
1
2
2
3
4
1
2
3
4
1
2
HPSµV
Rectifier
HPSµV
Rectifier
HPSµV
Rectifier
ЛВС 1
HPSµV
Rectifier
Rectifier
ИБП 24 В
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
3
4
1
2
3
4
1
2
220В
потреб.2
220В
потреб.3
220В
потреб.4
24В
потреб.5
24В
потреб.6
24В
потреб.7
24В
потреб.8
24В
потреб.9
24В
потреб.10
24В
потреб.11
3com
24В
потреб.12
24В
потреб.13
24В
потреб.14
24В
потреб.15
24В
потреб.16
Блок электрический
распределительный
3
4
1
2
3
4
1
2
2
2
2
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
4
3
4
3
4
1-1-1
3
4
1
2
3
4
1
2
3
4
3
4
1-1-1
3
4
1
2
3
4
1
2
3
4
3
4
1-1-1
3
4
1
2
3
4
1
2
3
4
3
4
1-1-1
3
4
1
2
3
4
1
2
3
4
3
4
1-1-1
3
4
1
2
3
4
1
2
1-1-1
1-1-1
4
4
3
3
1-1-1
1-1-1
3
4
4
3
3
1-1-1
1-1-1
3
4
4
3
3
1-1-1
1-1-1
3
4
4
3
3
1-1-1
1-1-1
3
4
4
3
3
1-1-1
1-1-1
1-1-1
1-1-1
3
3
1-1-1
3
4
4
3
3
1-1-1
1-1-1
3
4
4
3
3
1-1-1
2
2
1-1-1
3
4
4
3
3
1-1-1
2
2
1
1
1-1-1
1-1-1
1-1-1
1-1-1
3
3
3
3
1-1-1
2
2
1
1
4
4
1-1-1
1-1-1
1-1-1
3
2
2
1-1-1
1-1-1
3
1
1
1-1-1
1-1-1
3
4
4
1-1-1
1-1-1
3
3
3
1-1-1
1-1-1
2
2
1
1
4
4
3
3
1-1-1
1-1-1
1-1-1
1
1
4
4
3
3
1-1-1
2
2
1-1-1
1-1-1
4
4
3
3
1-1-1
2
2
1
1
1-1-1
3
3
3
1-1-1
2
2
1
1
4
4
1-1-1
1-1-1
3
2
2
1
1
4
4
3
3
1-1-1
1-1-1
1-1-1
1-1-1
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
3
4
3
4
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
3
4
1-1-1
UI
Линии радиоканалов и
внешних абонентов СКРС
БВИ 7
220В
потреб.1
1
1
1
1-1-1
1-1-1
1
4
4
1
1
4
4
3
3
1-1-1
2
2
Коммутатор ОРМ
Коммутатор ИО
Ввод I
Ввод II
2
2
3
4
4
3
3
1-1-1
2
2
1
1
1-1-1
3
3
3
1-1-1
2
2
1
1
4
4
3com
Блок электрический распределительный
Переключатель
вводов
1
1
2
2
1-1-1
1-1-1
HPSµV
1
1
1-1-1
1-1-1
1
4
4
1-1-1
1-1-1
3com
3
3
1-1-1
1-1-1
2
2
1
1
4
4
3
3
1-1-1
1-1-1
1-1-1
1
1
4
4
3
3
1-1-1
2
2
1-1-1
1-1-1
4
4
3
3
1-1-1
2
2
1
1
1-1-1
1-1-1
3
3
1-1-1
2
2
1
1
4
4
1-1-1
1-1-1
1
2
2
1
1
4
4
3
3
1-1-1
1-1-1
PUL S A R
Ev o l u t i o n
1
1
4
4
3
3
1-1-1
1-1-1
1
4
4
3
3
1-1-1
3
3
1-1-1
3com
3
1-1-1
3
3
1-1-1
1
1
3
1-1-1
3
3
1-1-1
M G E
ЛВС 1
CTRL
LINK1
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
D3
D3
D3
D3
ЛВС 2
ЛВС 2
На пульты
ОРМ и СТКУ
3com
Коммутатор ОРМ
БВИ 8
CTRL
CTRL
LINK1
CTRL
LINK1
ACT1
D3
MPU
D3
MPU
CTRL
LINK1
LINK1
ACT1
LINK2
ACT2
D3
CTRL
ACT1
LINK2
ACT2
D3
LINK1
ACT1
LINK2
ACT2
CTRL
LINK1
ACT1
LINK2
MPU
ACT1
LINK2
ACT2
LINK2
ACT2
ACT2
355.
Внутренний кроссовый блокСтруктурная схема аппаратуры ИО
БВИ 1
CTRL
CTRL
LINK1
CTRL
CTRL
CTRL
LINK1
CTRL
1
2
1
2
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
D3
D3
MPU
D3
D3
MPU
D3
D3
MPU
UI
MPU
D3
D3
MPU
D3
D3
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
3
4
1
2
HPSµV
Rectifier
HPSµV
Rectifier
HPSµV
Rectifier
1
1
CTRL
CTRL
CTRL
LINK1
ACT1
CTRL
1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
3
4
1
2
3
4
1
2
D3
D3
MPU
D3
D3
MPU
D3
D3
MPU
D3
D3
MPU
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
2
3
4
1
2
3
4
1
2
3
4
1
1
2
3
4
1
2
3
1
2
3
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
1
2
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
1
2
3
4
4
1
2
3
4
1
2
3
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
2
3
4
1
2
3
4
1
2
3
4
1
1
2
3
4
4
1
2
3
4
1
2
3
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
2
3
4
1
2
3
4
1
2
3
4
1
1
2
3
4
4
1
2
3
4
1
2
3
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
1-1-1
1-1-1
1-1-1
3
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
3
4
1
2
3
4
3
4
1
2
3
4
2
3
4
1
2
3
4
2
3
4
1
2
3
4
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
4
1
2
3
4
1
2
3
4
4
1
2
3
4
1
2
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
CTRL
1-1-1
1-1-1
D3
D3
MPU
D3
1
2
1
2
1
2
1
2
1-1-1
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
D3
1-1-1
1
2
1
2
1
2
1
2
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
БВИ 3
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
Блок электрический распределительный
CTRL
Переключатель
вводов
Ввод I
Ввод II
220В
потреб.1
220В
потреб.2
220В
потреб.3
220В
потреб.4
24В
потреб.5
24В
потреб.6
24В
потреб.7
24В
потреб.8
24В
потреб.9
24В
потреб.10
24В
потреб.11
24В
потреб.12
24В
потреб.13
24В
потреб.14
24В
потреб.15
24В
потреб.16
Ввод 2
CTRL
CTRL
LINK1
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
На вентиляторы шкафа ГО
CTRL
UI
MPU
D3
D3
MPU
D3
D3
MPU
D3
D3
MPU
PUL S A R
Ev o l u t i o n
UPS S Y S T EMS
500
D3
MPU
UI
ИБП ЛВС 1
Внешний кроссовый блок
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
ACT1
LINK2
ACT2
UI
MPU
UI
1
2
1
2
1
2
1
2
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
PUL S A R
Ev o l u t i o n
UPS S Y S T EMS
500
БВИ 5
2
1
2
2
1
2
1
2
3
4
1
2
3
4
1
2
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1
2
2
3
4
1
2
3
4
1
2
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
1
2
1
2
3
4
1
2
3
4
1
2
1
2
2
3
4
1
2
3
4
1
2
1
2
1
2
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
2
1
2
3
4
1
2
ЛВС 1
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
2
1
2
3
4
1
2
3
4
1
2
2
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
2
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
1-1-1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
1-1-1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
1-1-1
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
1-1-1
1-1-1
1-1-1
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
3
1-1-1
1-1-1
3
4
3
1-1-1
1-1-1
2
4
3
1-1-1
1-1-1
1
4
3
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
3
4
3
4
1-1-1
ACT2
3com
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
Коммутатор ОРМ
Линии радиоканалов и
внешних абонентов СКРС
БВИ 7
Коммутатор ИО
3com
ЛВС 1
CTRL
CTRL
LINK1
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
ACT1
LINK2
ACT2
UI
MPU
D3
D3
ЛВС 2
ЛВС 2
На пульты
ОРМ и СТКУ
Для
подключения
внешних
абонентов
и
радиоканалов
используется
устройство
кроссировки. Все линии ГГС и линии
управления
радиостанциями
заводятся на плинты внешнего
кроссового блока.
1-1-1
1-1-1
4
4
3
1-1-1
1-1-1
3
4
3
1-1-1
1-1-1
3
4
3
1-1-1
1-1-1
3
3
1-1-1
1-1-1
1-1-1
3
2
1
1-1-1
1-1-1
3
2
1
4
1-1-1
1-1-1
4
2
1
4
3
1-1-1
1-1-1
3
1
4
3
1-1-1
1-1-1
1-1-1
3
1
1-1-1
1-1-1
3
4
4
3
1-1-1
1-1-1
1-1-1
2
3
3
1-1-1
1-1-1
1-1-1
1
2
1-1-1
1-1-1
4
2
1
1-1-1
1-1-1
3
2
1
4
1-1-1
1-1-1
3
2
1
4
3
1-1-1
1-1-1
3
1
4
3
1-1-1
1-1-1
3
4
3
1-1-1
1-1-1
3
3
1-1-1
1-1-1
3
2
2
1
4
3
1-1-1
1-1-1
3
1
4
3
1-1-1
1-1-1
1-1-1
1
4
1-1-1
1-1-1
1
3
1-1-1
1-1-1
1
2
1-1-1
1-1-1
БВИ 6
1
1-1-1
1-1-1
3com
4
4
3
1-1-1
1-1-1
1-1-1
Коммутатор ИО
3
3
1-1-1
1-1-1
1-1-1
1
2
1-1-1
1-1-1
MPU
2
1
1-1-1
1-1-1
1
2
1
4
1-1-1
1-1-1
CTRL
2
1
4
3
1-1-1
1-1-1
1
1
4
3
1-1-1
1-1-1
1
4
3
1-1-1
1-1-1
ИБП ЛВС 2
3
1-1-1
1-1-1
MGE
Каждый
БВИ
содержит
6
интерфейсных
модулей,
через
которые
СКРС
«Мегафон»
сопрягается с радиостанциями и
внешними сетями телефонной связи.
ACT2
D3
БВИ 4
MGE
БВИ содержит кроссплату, имеющую
общую шину питания и независимые
шины
данных/управления
для
каждого интерфейсного модуля.
1-1-1
1-1-1
1-1-1
1-1-1
4
1-1-1
1-1-1
1-1-1
3
1-1-1
2
1-1-1
1-1-1
4
3
1
1-1-1
1-1-1
3
4
1-1-1
1-1-1
2
3
1-1-1
1-1-1
1
1-1-1
3
1-1-1
4
1-1-1
1-1-1
4
3
1-1-1
1-1-1
4
1-1-1
Ввод 1
2
3
1-1-1
БЭР
2
1
3
1-1-1
Питание
~220 В
2
1
4
1-1-1
1-1-1
MPU
2
1
4
3
2
1-1-1
CTRL
1
4
3
1
1-1-1
Rectifier
4
3
4
1-1-1
HPSµV
Rectifier
3
3
1-1-1
HPSµV
2
1-1-1
1-1-1
БВИ 2
1
1-1-1
1-1-1
ИБП +24 В
4
1-1-1
1-1-1
1-1-1
MPU
3
Плинты внутреннего кроссового
блока
соединяются
с
соответствующими модулями ИО
типовым кабелем при монтаже ГО.
Коммутация
каналов
интерфейсных
модулей
и
подключаемых к СКРС внешних
линий
осуществляется
соединениями соответствующих
контактов плинтов внешнего и
внутреннего кроссовых блоков.
3com
Коммутатор ОРМ
БВИ 8
CTRL
LINK1
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
MPU
ACT2
D3
D3
MPU
ACT2
D3
D3
MPU
ACT2
UI
MPU
ACT2
UI
MPU
ACT2
UI
MPU
D3
D3
Каждый
интерфейсный
модуль
включает
микропроцессорный модуль (МПМ) и модуль внешнего
интерфейса (МВИ), физически выполненные на разных
печатных платах.
356.
Все МПМ однотипны и аналогичны тем, которые используются в аппаратуре рабочих мест. Винтерфейсном оборудовании МПМ выполняют задачи по обмену речевой и командной информацией
между ЛВС и модулем внешнего интерфейса. Каждый процессорный модуль включен в
дублированную ЛВС через соответствующие порты.
Модуль внешнего интерфейса обеспечивает аналого-цифровое и цифро-аналоговое преобразования,
а также электрическое сопряжение с внешним оборудованием связи. В СКРС «Мегафон»
применяются модули внешних интерфейсов нескольких типов, в зависимости от вида сопрягаемого
оборудования.
Каждый интерфейсный модуль имеет независимое подключение к дублированной ЛВС СКРС
«Мегафон».Для каждого интерфейсного модуля выделено по одному порту на коммутаторах ЛВС.
ОСПД также размещается в шкафу ГО. Подключение модулей ИО выполняется при монтаже
группового оборудования.
Блок внешних интерфейсов (БВИ) используется для
размещения и сопряжения модулей МПМ и МВИ, а также для
подключения к ним через разъемы кроссплаты линий ЛВС, внешних
сигнальных линий ГГС и радиосвязи. Аппаратура выполнена в
унифицированном блоке, включающем:
корпус;
Блок внешних интерфейсов
Общее устройство
МВИ ведущий
МПМ
МВИ ведомый
CTRL
CTRL
LINK1
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
MPU
ACT2
D3
Модуль 1
D3
MPU
ACT2
D3
Модуль 2
D3
MPU
ACT2
D3
Модуль 3
D3
MPU
ACT2
UI
Модуль 4
MPU
кроссплату;
микропроцессорные модули (МПМ) – 6 шт.;
ACT2
D3
Модуль 5
D3
MPU
D3
D3
модули внешних интерфейсов (МВИ) – от 6 до 12 шт.
Модуль 6
Кроссплата крепится в задней части корпуса. Остальные устройства выполнены в виде типовых
модулей (печатных плат с фальшпанелью с лицевой стороны и разъемом с обратной стороны) и
вдвигаются внутрь блока с лицевой стороны по специальным направляющим (рис. 1.12). При этом
разъемы модулей стыкуются с ответными разъемами на кроссплате.
Кроссплата предназначена для распределения сигналов и цепей питания между модулями.
357.
Лицевая панель БВИМВИ ведущий
МПМ
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
LAN 0
LAN 1
UI
Модуль 4
MPU
D3
D3
Модуль 5
на кросс
Контроллер внешнего
интерфейса
HSS
HSS
МВИ 1
In
D3
Контроллер внешнего
интерфейса
HSS
Out
MPU
Модуль 6
на кросс
МПМ
шина питания
+24 В
MPU
Модуль 3
Микропроцессор
COM
D3
канал 1
ЛВС 2
D3
МВИ 2
D3
Кроссплата БВИ содержит для всех
интерфейсных
модулей
общую
шину
бесперебойного
питания.
Сигнальные
цепи
у
каждого
интерфейсного
модуля
независимые.
Таким
образом,
каждый МПМ со связанными с ним
МВИ
и
секцией
кроссплаты
представляют
собой
автономно
работающее устройство.
канал 3
Модуль 2
ЛВС 1
MPU
канал 2
D3
канал 0
D3
канал 3
MPU
канал 0
Функциональная схема модуля БВИ
Модуль 1
D3
канал 2
D3
канал 1
MPU
На одном БВИ функционируют 6
интерфейсных
модулей.
Они
нумеруются слева направо и с
учетом нумерации БВИ в шкафу
(сверху
вниз)
обозначаются:
«Модуль
1-1»,
«Модуль
1-2»,
«Модуль 1-3», … , «Модуль 2-1», …
и т.д., до «Модуль 8-6».
МВИ ведомый
МПМ организует работу интерфейсного
модуля БВИ. МПМ построен на базе
коммуникационного процессора Intel
IXP425
с
интегрированными
интерфейсами ввода-вывода. При этом
2 интерфейса Ethernet 10/100 (LAN 0 и
LAN 1) используются для подключения к
дублированной ЛВС СКРС «Мегафон», а
высокоскоростной интерфейс HSS (high
speed serial) связывает МПМ с
модулями внешних интерфейсов.
358.
Речевые сигналы в виде отсчетов PCM и сигналы управленияпередаются между портами HSS в обоих направлениях через
цепи кроссплаты по линиям данных In и Out. Информация по
линиям данных передается в последовательном коде.
Мультиплексирование обеспечивается по протоколу TDM (timedivision multiplexed). При этом обеспечивается общая пропускная
способность 2 Мбит/с, а на каждый аналоговый канал 64 Кбит/с.
МПМ оснащен запоминающим устройством типа
Flash Memory. В нем выделены две области.
Первая защищена атрибутом RO (только для
чтения) и содержит файлы операционной
системы и исполняемые файлы прикладного ПО.
Во второй области размещаются обновляемые
файлы конфигурации СКРС «Мегафон».
Модули внешних интерфейсов обеспечивают взаимодействие с
внешними каналами связи. В зависимости от типа сопрягаемого
оборудования применяются различные типы МВИ.
Обозначение
UI
I4
D2
D2R
D3
FXO
FXS
Назначение
Сопряжение с линиями приема и передачи радиоканалов.
Модули внешних интерфейсов
Типы модулей внешних интерфейсов
Число
каналов
1
Сопряжение с аппаратурой связи, использующей сигнальные процедуры с вызовом
переменным током; открытыми каналами
Сопряжение с каналами прослушивания
Сопряжение с абонентскими комплектами ДПУ-2
Сопряжение с абонентскими комплектами ПРБ
Сопряжение с абонентскими комплектами ДПУ-3: «Орех», «Марс»
Сопряжение с линиями УПАТС
Сопряжение с абонентскими комплектами, использующими сигнальную процедуру
Q.23 МСЭ-Т
4
4
4
4
1
1
При использовании модулей UI, каждый микропроцессорный модуль обеспечивает работу только одного интерфейса (канала).
При этом может осуществляться двух-, четырех- или шестипроводное его подключение. Модуль UI имеет широкую фальшпанель.
Модули других типов могут устанавливаться попарно. Первый используемый МВИ устанавливается рядом с МПМ (слева). По
необходимости справа устанавливается второй МВИ. Исходя из логики совместной работы двух МВИ через одну шину, первый
МВИ считается ведущим, а второй – ведомым.
При сопряжении СКРС с местными системами ГГС, в основном, используются четырехканальные МВИ, которые могут попарно
взаимодействовать с МПМ в рамках одного интерфейсного модуля. Таким образом, интерфейсный модуль может обслуживать до
8 двухпроводных линий, например, при сопряжении с ДПУ-3.
359.
Протокол взаимодействия МПМ с МВИ определяется программной конфигурацией интерфейса и жестко связан стипом модуля внешних интерфейсов. Поэтому в рамках одного интерфейсного модуля могут функционировать
МВИ только одинаковых типов.
Одновременная установка двух МВИ различных типов в одном интерфейсном модуле запрещается.
Модуль внешнего интерфейса выполнен в виде отдельной платы и имеет внешние входные и выходные линии.
Внешним входом/выходом каждого интерфейса является пара контактов соответствующего внешнего разъема
кроссплаты БВИ. В МВИ с двухпроводными линиями связи пара является общей для входного и выходного
интерфейса.
Кодеки имеют следующие технические характеристики:
МВИ имеет порт HSS для обмена
данными и командами с МПМ.
частота дискретизации:
8000 Гц;
дискретность оцифровки:
8 бит;
метод преобразования сигнала: импульсно-кодовая модуляция
(ИКМ, закон А) в соответствии со стандартом МСЭ-Т (МККТТ) серии
G703.
Аппаратные различия между типами МВИ определяются наличием на их платах специфических
радиоэлектронных блоков, обеспечивающих прием и выдачу стандартных сигналов, в соответствие с сигнальной
процедурой внешнего радио-, телефонного или ГГС канала. При этом, модули полностью имитируют
управляющие сигналы подключаемых устройств: вызов, занятость и т. п.
Сигнализация, установленная для интерфейсов, использующих сигнальные процедуры с вызовом переменным
током, обеспечивается программно. При этом входящие сигналы ТЧ оцифровываются, а ПО МПМ оценивает их
спектральные и временные параметры. Для исходящей сигнализации ПО генерирует цифровые сигналы
требуемых частот и длительности, передает в МВИ, где осуществляется их ЦАП и выдача в линию. Например, для
таких интерфейсов, как ИВА, ДПУ перем. напр., вся сигнализация обеспечивается программно и поэтому могут
применяться однотипные модули (UI, I4).
Разные интерфейсы, использующие сигнальные процедуры с вызовом переменным током допускается
конфигурировать на одном интерфейсном модуле и на одном МВИ. Интерфейсы без сигнализации, например,
открытый канал, приемник и т.д. – подключаются аналогично.
360.
Кроссплата БВИ обеспечивает питанием модули БВИ, а для каждого отдельногоинтерфейсного модуля организует связь его устройств между собой, а также с
внешними устройствами. Кроссплата закреплена в задней части БВИ. Разъемы,
расположенные на внутренней стороне кроссплаты предназначены для
подключения модулей МПМ и МВИ.
Модуль 6
Модуль 5
Модуль 4
Модуль 3
Модуль 2
Кроссплата БВИ
Модуль 1
Внешние разъемы
кроссплаты служат
для подключения
кабелей кросс-БВИ,
кабелей
Внешние разъемы кроссплаты БПИ
1
1
2
3
4
5
6
7
2
3
4 5
6
7
Маркировка разъемов сигналов БВИ
разъем сигналов МВИ 2 (ведомого);
разъем сигналов МВИ 1 (ведущего);
разъем (розетка) ЛВС 1;
разъем (розетка) ЛВС 2;
технологический COM порт;
селекторы установки адреса;
разъем питания 24В.
Разъемы сигналов маркируются наклейками, указывающими
составной номер соответствующих МВИ в рамках всего
комплекта ИО. Первая часть указывает номер БВИ, средняя
– номер интерфейсного модуля, а последняя – номер
МВИ.
Например, 6-3-1 – первый (ведущий) МВИ третьего модуля шестого БВИ
361.
Контакт№
1
2
3
4
5
Обозна
чение
A1
Нумерация контактов разъема сигналов
Сигнал
Цвет провода
Линия А вх/вых 1
Зелёный
6 B1
Линия В вх/вых 1
Бело-Зелёный
A2
Линия А вх/вых 2
Оранжевый
К разъемам сигналов подсоединяется кабель кроссБВИ, предназначенный для подключения к
соответствующему МВИ внешних линий связи от
устройства кроссировки.
7 B2
Линия В вх/вых 2
Бело-Оранжевый
Тип разъема: DB 9M (гнезда)
A3
Линия А вх/вых 3
Синий
8 B3
Линия В вх/вых 3
Бело-Синий
A4
Линия А вх/вых 4
Коричневый
9 B4
Линия В вх/вых 4
Бело-Коричневый
ЭКРАН
ЭКРАН
ЭКРАН
Разъемы ЛВС предназначены для подключения
микропроцессорных
модулей
БПИ
к
дублированной ЛВС. К разъемам подключается
кабель ЛВС.
Тип разъема RJ-45.
Нумерация контактов соответствует стандарту EIA-T586B.
Нумерация контактов разъема ЛВС
Контакт №
1
2
3
4
5
6
7
8
Обозначение
пара 2B
пара 2А
пара 3B
пара 1А
пара 1B
пара 3А
пара 4B
пара 4А
Цвет провода
Бело-зелёный
Зелёный
Бело-оранжевый
Синий
Бело-синий
Оранжевый
Бело-коричневый
Коричневый
Схема
Пара 1
Пара 2
Пара 3
Пара 4
12345678
362.
Разъём питания предназначен для подачи на БВИ внешнего питания. К разъёму подключается кабель питанияБВИ.
Тип разъёма: DB9 M (штыри).
Нумерация контактов разъема питания
Контакт №
1
2
3
4
5
6
7
8
9
Обозначение
0
0
0
0
0
+12В
+12В
+12В
+12В
Назначение
Корпус
Корпус
Корпус
Корпус
Корпус
Питание +12В
Питание +12В
Питание +12В
Питание +12В
Устройство кроссировки
на БВИ
1
2
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
1
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
1
2
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
2
2
1
2
1
2
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1
2
1
2
3
4
1
2
3
4
1
2
2
2
3
4
1
2
3
4
1
2
4
1
2
4
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
2
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
2
3
4
1
2
3
4
1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
2
3
4
1
2
3
4
1
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
4
1
2
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
4
1
2
3
4
1
2
3
4
1
2
1
2
4
1
2
3
4
1
2
3
4
1
2
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
3
4
1
2
3
4
1
2
4
3
4
3
3
4
1
2
3
4
1
2
4
3
4
3
3
4
1
2
3
4
1
2
3
4
1
2
4
3
4
3
4
3
2
3
4
1
2
3
4
1
4
2
3
4
2
3
3
4
1
2
4
3
3
4
1
2
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
2
3
4
1
2
3
4
1
2
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
3
4
3
4
3
4
3
4
3
4
4
1
2
4
1
2
3
4
3
4
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
3
4
1-1-1
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
3
4
3
4
3
4
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1
2
1
2
3
4
1
2
3
4
1
2
2
1
2
1
2
4
1
2
3
4
1
2
3
4
1
2
1-1-1
1
2
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
3
1-1-1
1-1-1
1-1-1
1-1-1
3
1-1-1
1-1-1
1-1-1
1-1-1
3
1-1-1
1-1-1
1-1-1
1-1-1
1
1-1-1
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
3
4
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
3
4
1-1-1
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
Общая схема устройства кроссировки
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
Внешний кроссовый блок
1-1-1
3
3
1-1-1
1-1-1
4
3
1-1-1
1-1-1
3
3
4
3
1-1-1
1-1-1
1
4
4
3
1-1-1
1-1-1
4
3
3
1-1-1
1-1-1
3
Внутренний кроссовый блок
1-1-1
1-1-1
1-1-1
1-1-1
4
3
1-1-1
1-1-1
3
3
4
3
1-1-1
1-1-1
1-1-1
1-1-1
4
1-1-1
1-1-1
3
3
3
1-1-1
3
4
3
1-1-1
1-1-1
1-1-1
1-1-1
2
2
1-1-1
1-1-1
1
2
1
1-1-1
1-1-1
4
2
1
4
1-1-1
1-1-1
3
1
4
3
1-1-1
1-1-1
3
4
3
1-1-1
1-1-1
3
3
1-1-1
3
3
1-1-1
1-1-1
1-1-1
1-1-1
3
2
1-1-1
1-1-1
3
2
1
1-1-1
1-1-1
3
2
1
4
1-1-1
1-1-1
2
2
1
4
3
1-1-1
1-1-1
1
1
4
3
1-1-1
1-1-1
4
4
3
1-1-1
1-1-1
1-1-1
3
3
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
2
1
4
3
1-1-1
1-1-1
3
3
1-1-1
1
4
3
1-1-1
1-1-1
1-1-1
1
1
2
1-1-1
1-1-1
Между внешним и внутренним кроссовыми блоками при
настройке СКРС осуществляется коммутация согласно таблице
подключений ИО.
1
1-1-1
1-1-1
2
4
1-1-1
1-1-1
1
3
1-1-1
1-1-1
4
3
1-1-1
1-1-1
1-1-1
1-1-1
1
2
1-1-1
1-1-1
1
2
1
1-1-1
1-1-1
Устройство кроссировки и коммутации состоит из двух кроссовых
блоков, размещенных в задней части шкафа ГО. Вверху
расположен внутренний кроссовый блок. Все его 48 плинтов
жестко связаны с соответствующими модулями ИО. Внизу
расположен внешний кроссовый блок. Он также содержит 48
плинтов, которые используются для подключения радиоканалов и
внешних абонентов СКРС.
2
1
4
1-1-1
1-1-1
2
1
4
3
1-1-1
1-1-1
2
4
3
1-1-1
1-1-1
1
3
1-1-1
1-1-1
3
1-1-1
1-1-1
1-1-1
1-1-1
1
2
1-1-1
1-1-1
2
2
1
1-1-1
1-1-1
1
2
1
4
1-1-1
1-1-1
2
2
1
4
3
1-1-1
1-1-1
1
1
4
3
1-1-1
1-1-1
1-1-1
2
4
3
1-1-1
1-1-1
1-1-1
1
3
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
линии радиоканалов и
внешних абонентов СКРС
363.
Порядок распределения плинтов внутреннего кроссового блока показан на рисунке Для каждого плинтауказан составной номер, где первая часть указывает номер БВИ, средняя – номер интерфейсного модуля, а
последняя – номер МВИ.
Например, 6-4-2 – второй МВИ четвертого модуля шестого БВИ.
Распределение плинтов внутреннего кроссового блока.
1-1-1
1-1-2
1-3-1
1-3-2
1-5-1
1-5-2
1-2-1
1-2-2
1-4-1
1-4-2
1-6-1
1-6-2
2-1-1
2-1-2
2-3-1
2-3-2
2-5-1
2-5-2
2-2-1
2-2-2
2-4-1
2-4-2
2-6-1
2-6-2
3-1-1
3-1-2
3-3-1
3-3-2
3-5-1
3-5-2
3-2-1
3-2-2
3-4-1
3-4-2
3-6-1
3-6-2
4-1-1
4-1-2
4-3-1
4-3-2
4-5-1
4-5-2
4-2-1
4-2-2
4-4-1
4-4-2
4-6-1
4-6-2
5-1-1
5-1-2
5-3-1
5-3-2
5-5-1
5-5-2
5-2-1
5-2-2
5-4-1
5-4-2
5-6-1
5-6-2
6-1-1
6-1-2
6-3-1
6-3-2
6-5-1
6-5-2
6-2-1
6-2-2
6-4-1
6-4-2
6-6-1
6-6-2
7-1-1
7-1-2
7-3-1
7-3-2
7-5-1
7-5-2
7-2-1
7-2-2
7-4-1
7-4-2
7-6-1
7-6-2
8-1-1
8-1-2
8-3-1
8-3-2
8-5-1
8-5-2
8-2-1
8-2-2
8-4-1
8-4-2
8-6-1
8-6-2
Плинты закрыты съемными накладками, на которых
указан составной номер и подписаны номера пар
Вид плинтов внутреннего кроссового блока
364.
Источник питанияПитание ИО осуществляется постоянным током от источника бесперебойного питания. Источник питания
получает 220 В от блока электрического распределительного (БЭР).
Источник питания вырабатывает постоянный ток +24В и заряжает аккумуляторную батарею, параллельно
которой через БЭР подключены потребители.
Источник питания состоит из набора модулей-выпрямителей и модуля контроллера.
Выпрямители работают параллельно и независимо друг от друга. Контроллер обеспечивает измерения
параметров и их настройку. При отключении источника питания электроснабжение потребителей 24В
осуществляется от аккумуляторной батареи.
Каждый БВИ получает питание 24В от БЭР через выделенный автомат защиты. ИБП 24В и БЭР размещены в
нижней части шкафа
Автоматы защиты сети БЭР используются согласно схеме
Оборудование питания.
Распределение автоматов защиты БЭР
Потребитель
№
1.
1.
1.
1.
1.
1.
1.
1.
1.
1.
1.
1.
1.
1.
1.
1.
Напряжение, В Получатель
220
220
220
220
24
24
24
24
24
24
24
24
Блок питания 24В
ИБП ЛВС 1
ИБП ЛВС 2
Вентиляция шкафа ГО
БВИ 1
БВИ 2
БВИ 3
БВИ 4
БВИ 5
БВИ 6
БВИ 7
БВИ 8
не используется
не используется
не используется
не используется
365.
Внутренний кроссовый блок?
БВИ 1
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
LINK1
LINK1
ACT1
LINK1
ACT1
LINK2
LINK1
ACT1
LINK2
ACT2
LINK1
ACT1
LINK2
ACT2
LINK1
ACT1
LINK2
ACT2
D3
D3
MPU
D3
D3
MPU
D3
D3
LINK2
ACT2
MPU
UI
MPU
1-1-1
ACT2
D3
D3
MPU
D3
D3
БВИ 2
HPSµV
Rectifier
HPSµV
Rectifier
LINK1
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
D3
MPU
D3
D3
MPU
D3
D3
MPU
D3
D3
MPU
1-1-1
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
1-1-1
1-1-1
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
3
4
D3
D3
MPU
D3
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
D3
1-1-1
1
2
1
2
1
2
1
2
БВИ 3
1-1-1
1-1-1
3
4
1
2
3
4
1
2
4
1
2
4
1
2
1-1-1
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
3
1-1-1
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
1-1-1
1-1-1
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
1-1-1
1-1-1
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
3
4
1-1-1
3
4
1
2
3
4
1
2
1-1-1
3
4
3
4
1-1-1
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
Блок электрический распределительный
CTRL
Переключатель
вводов
Ввод I
Ввод II
220В
потреб.1
220В
потреб.2
220В
потреб.3
220В
потреб.4
24В
потреб.5
24В
потреб.6
24В
потреб.7
24В
потреб.8
24В
потреб.9
24В
потреб.10
24В
потреб.11
24В
потреб.12
24В
потреб.13
24В
потреб.14
24В
потреб.15
24В
потреб.16
Ввод 2
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
MPU
На вентиляторы шкафа ГО
CTRL
UI
MPU
D3
D3
MPU
D3
D3
MPU
D3
D3
MPU
D3
D3
MPU
Внешний кроссовый блок
M G E
PUL S A R
Ev o l u t i o n
UPS S Y S T EMS
500
CTRL
LINK1
LINK1
ACT1
UI
MPU
MPU
ACT1
LINK2
ACT2
UI
LINK1
ACT1
LINK2
ACT2
MPU
CTRL
LINK1
ACT1
LINK2
ACT2
UI
CTRL
LINK1
ACT1
LINK2
ACT2
MPU
CTRL
LINK1
ACT1
LINK2
ИБП ЛВС 1
CTRL
LINK2
ACT2
UI
MPU
ACT2
UI
MPU
UI
1
2
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1-1-1
PUL S A R
Ev o l u t i o n
UPS S Y S T EMS
500
1
2
1
2
1
2
1
2
4
1
2
4
1
2
1
2
1
2
3
4
1
2
3
4
1
2
1
2
2
3
4
1
2
3
4
1
2
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
1
2
1
2
3
4
1
2
3
4
1
2
1
2
2
3
4
1
2
3
4
1
2
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
1
2
2
3
4
1
2
3
4
1
2
Коммутатор ИО
1
2
1
2
3
4
1
2
3
4
1
2
1
2
1
2
3com
БВИ 6
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
ЛВС 1
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
LINK2
LINK2
LINK2
LINK2
ACT2
ACT2
ACT2
ACT2
ACT2
ACT2
2
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
2
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
1
2
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
1
2
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
2
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
1
2
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
4
1
2
3
4
1
2
4
4
3
4
3
4
3
4
3
4
3
4
3
4
1-1-1
3
4
1
2
3
4
1
2
3
4
3
4
1-1-1
3
4
1
2
3
4
1
2
3
4
3
4
1-1-1
3
4
1
2
3
4
1
2
3
4
1
2
3
4
3
4
3
4
3
4
3
4
1-1-1
1-1-1
3
4
4
3
3
1-1-1
1-1-1
1-1-1
4
4
3
3
1-1-1
1-1-1
3
4
4
3
3
1-1-1
1-1-1
3
4
4
3
3
1-1-1
1-1-1
3
4
3
3
1-1-1
1-1-1
3
4
3
1-1-1
1-1-1
3
4
3
1-1-1
1-1-1
3
4
3
1-1-1
4
4
1-1-1
3
3
1-1-1
3
3
1-1-1
1-1-1
1-1-1
2
1
4
3
1-1-1
1-1-1
1-1-1
3
4
4
1-1-1
1-1-1
1-1-1
3
3
1-1-1
3
1
4
3
1-1-1
1-1-1
3
4
3
1-1-1
1-1-1
3
3
1-1-1
2
2
1-1-1
1-1-1
3
2
1
1
1-1-1
1-1-1
3
2
1
4
4
1-1-1
1-1-1
3
2
1
4
3
3
1-1-1
1-1-1
3
2
1
4
3
1-1-1
1-1-1
3
1
4
3
1-1-1
1-1-1
3
4
3
1-1-1
4
4
1-1-1
3
3
1-1-1
3
3
1-1-1
1-1-1
1-1-1
2
1
4
3
1-1-1
1-1-1
1-1-1
1
4
4
1-1-1
1-1-1
1
3
3
1-1-1
1-1-1
1
4
3
1-1-1
1-1-1
1-1-1
4
3
1-1-1
1-1-1
1-1-1
3
1-1-1
2
2
1-1-1
1-1-1
1
2
1
1
1-1-1
1-1-1
MPU
2
1
4
4
1-1-1
1-1-1
1
2
1
4
3
3
1-1-1
1-1-1
LINK1
2
1
4
3
1-1-1
1-1-1
1
1
4
3
1-1-1
1-1-1
БВИ 5
4
3
1-1-1
3
3
1-1-1
ИБП ЛВС 2
3
1-1-1
1-1-1
M G E
Оборудование среды передачи данных (ОСПД) и
внутрисистемные
линии
связи
предназначены
для
объединения микропроцессорных модулей ИО и ОРМ, а также
СТКУ в единую ЛВС.
UI
БВИ 4
CTRL
Оборудование среды передачи данных
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
Ввод 1
4
3
4
3
1-1-1
1-1-1
1-1-1
БЭР
3
3
1-1-1
1-1-1
1-1-1
Питание
~220 В
2
1-1-1
1-1-1
D3
2
1
CTRL
LINK2
MPU
2
1
4
1-1-1
1-1-1
CTRL
2
1
4
3
1-1-1
1-1-1
Rectifier
CTRL
2
1
4
3
1-1-1
1-1-1
HPSµV
Rectifier
2
1
4
3
1-1-1
1-1-1
HPSµV
1
4
3
1-1-1
1-1-1
ИБП +24 В
Rectifier
4
3
1-1-1
1-1-1
HPSµV
3
1-1-1
ACT1
LINK2
ACT2
1-1-1
MPU
1-1-1
3
4
1
2
3
4
1
2
1-1-1
1-1-1
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
1-1-1
Базовый комплект ОСПД включает сетевые коммутаторы и
кабели. При подключении используется топология типа
“звезда”: Каждый МПМ (компьютер) имеет независимое
подключение к ЛВС через специальное устройство коммутатор.
При
этом
используется
кабель
типа
экранированная витая пара пятой категории, все соединения
выполняются разъемами RJ-45.
3com
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
MPU
UI
Коммутатор ОРМ
Линии радиоканалов и
внешних абонентов СКРС
БВИ 7
Коммутатор ИО
3com
CTRL
CTRL
CTRL
CTRL
CTRL
CTRL
LINK1
LINK1
LINK1
LINK1
LINK1
LINK1
ACT1
ACT1
ACT1
ACT1
ACT1
ACT1
LINK2
LINK2
ACT2
ЛВС 1
LINK2
ACT2
MPU
UI
LINK2
ACT2
MPU
UI
MPU
LINK2
ACT2
UI
MPU
LINK2
ACT2
UI
MPU
ACT2
UI
MPU
D3
D3
ЛВС 2
ЛВС 2
На пульты
ОРМ и СТКУ
3com
Коммутатор ОРМ
БВИ 8
CTRL
CTRL
LINK1
CTRL
LINK1
ACT1
D3
MPU
D3
MPU
CTRL
MPU
ACT1
LINK2
ACT2
UI
MPU
Питание
~220В
CTRL
LINK2
ACT2
UI
Питание
~220В
LINK1
ACT1
LINK2
ACT2
D3
LINK1
ACT1
LINK2
ACT2
D3
LINK1
ACT1
LINK2
ACT2
CTRL
LINK1
ACT1
LINK2
MPU
?
ACT2
UI
MPU
D3
D3
ИБП
MGE
UPS S Y S T EMS
ИБП
MGE
PUL S A R
Ev o l u t i o n
500
UPS S Y S T EMS
Коммутатор 48 портов (ИО)
PUL S A R
Ev o l u t i o n
500
Коммутатор 48 портов (ИО)
3com
3com
В
целях
обеспечения
отказоустойчивости
в
системе
“Мегафон”
применяются
два
независимых тракта ЛВС
Коммутатор 24 порта (ОРМ)
ЛВС 1
Коммутатор 24 порта (ОРМ)
3com
ЛВС 2
3com
ПБ
СТКУ
МПМ модулей интерфейсного оборудования
Схема ОСПД
МПМ оборудования рабочих мест
366.
Оборудование среды передачи данных размещено в шкафу группового оборудования.Для стандартного комплекта ИО на 48 модулей ОСПД содержит по 2 коммутатора на каждую ЛВС. При
этом первый коммутатор емкостью в 48 портов обеспечивает подключение к ЛВС всех интерфейсных модулей с
помощью стандартного кабеля ЛВС-БВИ. Второй коммутатор обеспечивает подключения ОРМ и СТКУ. Он штатно
имеет емкость на 24 порта.
Состав ОСПД
Обозначение
Вид комплектующих
1.
Комплект оборудования среды передачи
данных, в том числе:
1. Источник бесперебойного питания 220В
1. Коммутатор ЛВС
1. Кабель ЛВС-БВИ
Количество
1
2
4
96
Кабели ЛВС-БПИ и ЛВС-ПБ СТКУ в таблице не показаны. Их изготовление и монтаж осуществляются
непосредственно на объекте, при установке оборудования.
При наличии рабочих мест, удаленных на расстояние до 5000 м, в состав ОСПД включается комплект
оборудования поддержки удалённых рабочих мест для подключения ОУРМ в ЛВС основной части системы.
Комплект может включать модемы, маршуритазоры и т.п. Состав и количество оборудования поддержки
удалённых рабочих мест определяются конкретной конфигурацией СКРС.
Система технического контроля и управления
Система технического контроля и управления (СТКУ) представляет собой персональный компьютер, оснащенный
комплексом программных средств, предназначенных для централизованного управления, контроля и
конфигурирования СКРС.
Оборудование СТКУ устанавливается на рабочем месте сменного инженера. Процессорный блок СТКУ
подключается к дублированной ЛВС СКРС «Мегафон».
367.
Оборудование СТКУ обеспечивает:непрерывный контроль работы СКРС;
дистанционное управление и настройку интерфейсов.
сигнализацию при отказах и их локализацию до уровня типового
элемента замены;
ведение журнала работы;
конфигурирование системы.
СТКУ представляет собой комплекс технических программных средств, предназначенных для
централизованного управления, контроля и конфигурирования СКРС. Программное обеспечение СТКУ
устанавливается на специально выделенное рабочее место, подключенное к ЛВС системы «Мегафон».
Обо
знач
ени
е
Состав СТКУ
Вид комплектующих
1.
Комплект оборудования СТКУ
1. Источник бесперебойного
питания
1. Процессорный блок СТКУ
1. Монитор
1. Клавиатура
1. Манипулятор (мышь)
1. Аудиосистема
1. Микрофон настольный
Кол
ичес
тво
1
1
Аудиосистема
1
1
1
1
1
1
Принтер
Монитор
Процессорный блок
Микрофон
Электропитание оборудования СТКУ осуществляется от сети
220В. Процессорный блок, монитор и аудиосистема
подключены через ИБП.
Все устройства ввода-вывода подключены к штатным
разъемам процессорного блока стандартными кабелями.
Процессорный блок имеет два сетевых порта, к которым
подключен кабель
ЛВС,
соединяющий
СТКУ
с
коммутаторами ЛВС 1 и ЛВС 2.
Мышь
Клавиатура
Питание ~220В
Источник бесперебойного питания
ЛВС 1
ЛВС 2
368.
Процессорный блокПроцессорный блок (ПБ) выполнен в унифицированном корпусе персонального компьютера.
В ПБ входят следующие устройства:
компьютерная платформа (КП);
контроллер растрового монитора (видеоадаптер);
контроллер (контроллеры) локальной вычислительной сети;
системный магнитный накопитель на жестком магнитном диске (НЖМД);
источник питания (ИППБ);
пульт управления (ПУПБ);
групповая панель разъемов связи с внешними устройствами (ГПВУ).
Компьютерная платформа обеспечивает обработку и преобразование информации, а также управление и
передачу информации между всеми устройствами процессорного блока.
В состав КП входят следующие устройства:
системная плата;
центральный процессор, совместимый по системе команд с семейством процессоров 80Х86 фирмы Intel,
с блоком охлаждения;
основное ОЗУ, выполненное в виде модуля (модулей) устанавливаемого в специальный разъем на
системной плате.
Системная плата содержит специальные разъемы для установки процессора, модулей памяти, плат расширения,
для подключения накопителей, внешних устройств (клавиатуры, манипулятора).
Некоторые из перечисленных устройств выполнены в виде плат расширения. Они устанавливаются в разъемы
(слоты) системной платы.
Сетевые адаптеры выполнены в виде платы с интерфейсом типа PCI или интегрированы в материнскую плату.
Функционально сетевые адаптеры являются элементом ЛВС и обеспечивают обмен информацией между КП и
ЛВС. Обычно в ПБ устанавливается два адаптера.
НЖМД предназначен для хранения прикладного и системного программного обеспечения и хранения
служебной информации.
369.
Состав ПБНаименование
оборудования
Корпус, включая ИППБ,
ПУПБ, ГПВУ
Системная плата
Процессор
ОЗУ
НЖМД
НГМД
Видеоадаптер
Сетевой адаптер
Требования к оборудованию
Форм-фактор АТХ
Количество
1
Форм-фактор АТХ; в соответствие с типом процессора
Не хуже P III – 500
Не хуже РС100, 64 МВ
Не менее 10 GB
3,5’’
Разрешение не хуже 1280х1024 на частоте 75 Гц.
Ethernet 100 Mbit
1
1
1
1
1
1
2
Конструкция ПБ
Процессорный блок представляет собой корпус, в котором располагается блок питания, охлаждающий
вентилятор, основная (материнская) плата компьютера, а также предусмотрены гнезда для установки плат
расширения, приводов жестких и гибких дисков. Верхняя крышка системного блока закреплена двумя винтами с
задней стороны корпуса. Для доступа внутрь корпуса требуется удалить крепежные винты и сдвинуть крышку
назад и вверх.
Снятие крышки ПБ
Внимание! Доступ внутрь системного блока
производиться только при отключении электропитания.
может
370.
Платы расширенияПлаты расширения устанавливаются в специальные гнезда на материнской плате. Для плат расширения
используются гнезда типов – PCI и AGP (PCI-E x16). Разъемы типа PCI размещаются в левой части материнской
платы, а разъем типа AGP (PCI-E x16) - в правой. Для установки дополнительной платы необходимо:
Открыть корпус процессорного блока.
Проверить маркировку на упаковке устанавливаемой дополнительной платы и определить, для какого
типа гнезда расширения она предназначена.
Найти незанятое гнездо расширения соответствующего типа или заменяемую плату.
Удалить винт, закрепляющий заглушку в задней части корпуса процессорного блока или заменяемую
плату и извлечь ее.
В результате операции (4) напротив выбранного для установки дополнительной платы гнезда в задней
стенке корпуса должно образоваться прямоугольное отверстие.
Аккуратно вставить плату в гнездо.
Закрепить плату винтом.
Закрыть корпус системного блока
Внимание! Включение компьютера с незакрепленными
платами расширения является нарушением правил эксплуатации и
может привести к выходу оборудования из строя.
Снятие крышки ПБ
371.
НакопителиВ ПБ СТКУ используются устройства типоразмера 3,5 (НГМД и НЖМД).
Для крепления накопителей в корпусе предусмотрен специальный съемный контейнер с секциями 3,5’’
и 5,25’’. В некоторых типах корпусов контейнер для накопителей не съемный.
Для установки устройства необходимо:
Открыть корпус процессорного блока.
Удалить крепежные винты контейнера аккуратно вынуть его, не нарушая кабельных соединений ранее
установленных устройств. Если контейнер не съёмный, следует снять соответствующие панели (боковые
стенки и заглушку на лицевой панели) с тем, чтобы обеспечить возможность установки устройства и доступ к
крепежным отверстиям.
Вставить устройство таким образом, чтобы крепежные отверстия на его корпусе совпали с отверстиями
в стенках контейнера. Закрепить устройство четырьмя винтами.
Установить контейнер на место и закрепить его винтами.
Подсоединить к установленному устройству разъем кабеля от блока питания.
Подсоединить разъем информационного кабеля, при этом нулевой разъем кабеля (маркирован
красным цветом) должен соответствовать нулевому разъему на устройстве (маркирован цифрой 0 или 1) и
располагается, как правило, со стороны разъема электропитания.
Закрыть корпус блока.
Удаление устройств осуществляется в обратном порядке.
372.
Модули памятиМодули памяти устанавливаются в специальные гнезда на материнской плате. Для установки или замены модуля памяти
необходимо:
Открыть корпус процессорного блока.
Найти на материнской плате разъемы модулей памяти.
Аккуратно вставить модуль в разъем.
Закрыть корпус процессорного блока.
Подключение периферийного оборудования к процессорному блоку
Для соединения с системным блоком каждый модуль имеет в своем составе специальный кабель, а на задней стенке системного
блока имеется ряд разъёмов
• Разъем типа PS 2 для подключения манипулятора
«мышь».
• Параллельный порт 1 (LPT1) - разъем типа DB-25,
не используется.
• Линейный выход на аудиосистему.
• Порты локальной вычислительной сети типа RJ-45
используются для подключения кабелей типа
«витая пара» от (сетевых коммутаторов) ОСПД.
• Входной разъем питания. От ИБП.
• Выключатель блока питания ПБ.
• Разъем типа PS 2 для подключения клавиатуры.
• Порт USB - не используется.
• Последовательный порт 1 (СОМ1) не
используется.
• Последовательный порт 2 (СОМ2) не
используется.
• Вход с микрофона.
• Разъем видеоадаптера - используется для
подключения кабеля на видеомонитор.
1
5
2
6
7
3
8
9
4
10
11
12
Задняя панель ПБ
373.
Использование по назначениюЭксплуатационные ограничения
Оборудование устанавливается в стационарных помещениях и отапливаемых кузовах и предназначено
для работы в следующих условиях:
температура окружающего воздуха
- от +5° С до +40° С;
относительная влажность воздуха
- до 80 % при температуре +25°С;
пониженное атмосферное давление
- до 525 мм рт. ст.
Электропитание аппаратуры осуществляется от промышленной сети переменного тока напряжением 220В
± 10 % и частотой 50 Гц ± 2 %.
Наличие заземления оборудования является обязательным. Сопротивление заземления между корпусом
ИБП и общей шиной заземления объекта эксплуатации не должно превышать 4 Ом.
Использование изделия
Система обеспечивает режим круглосуточной эксплуатации, с перерывами на проведение периодического
техобслуживания.
Не допускается использование системы в целом, отдельных подсистем и оборудования не по назначению.
Штатное использование оборудование включает непосредственную эксплуатацию оборудования
пользователями, а также настройку и конфигурирование оборудования в процессе эксплуатации.
Штатная эксплуатация оборудования
Подготовка к включению и включение
Перед включением следует убедиться путем внешнего осмотра в целостности внешних кабельных соединений
блоков аппаратуры.
374.
Включение системы предусматриваетпитания аппаратуры следующих подсистем:
включение
• включение ОСПД;
• включение
аппаратуры
оборудования;
• включение аппаратуры ОРМ;
• включение СТКУ.
интерфейсного
Mетодики включения аппаратуры предполагают, что:
сетевое питание на входы блоков электрических распределительных шкафа ГО и пультов подано.
выключатели питания отдельных устройств и блоков аппаратуры, кроме ИБП и БЭР шкафа ГО, находятся в
положении «Вкл».
Включение ОСПД
Сетевые коммутаторы ОСПД установлены в шкафу ГО и запитываются от отдельных ИБП.
Включение выполняется в следующей последовательности:
1 Включить на БЭР автоматы защиты для потребителей 2, 3 и 4 (поднять выключатели).
2 Включить питание ИБП ЛВС 1 кнопкой на передней панели (справа). При включении кнопка подсветится
зеленым светодиодом. В процессе включения ИБП производит процедуру самотестирования, на
непродолжительное время переключаясь в режим работы от аккумуляторов, при этом загорается индикатор «On
Battery».В процессе самотестирования ИБП выдаются звуковые сигналы. После успешного завершения процедуры
загорается индикатор «On Line». Включить питание ИБП ЛВС 2 (аналогично).
3 Убедиться, что ИБП перешли в нормальный режим по окончании процесса самотестирования.
4 Убедиться, что засветились светодиоды индикации питания сетевых коммутаторов.
При возникновении сигналов о неисправностях вызвать дежурного инженера.
375.
Интерфейсное оборудование размещено в шкафу ГО.Включение ИО
Включение выполняется в следующей последовательности:
1 Привести на БЭР автоматы защиты для потребителей 5 – 12 в положение «выключено»
(опустить выключатели).
2 Проверить положение автоматов «Load» и «Battery» на задней панели ИБП 24В (включены –
выключатели подняты).
3 Включить на БЭР автомат защиты для потребителя 1 (поднять выключатель). Питание начнет
поступать на источник бесперебойного питания +24В. В процессе включения ИБП 24В производит
процедуру самотестирования, сопровождающуюся миганием индикации блока контроллера и
звуковыми сигналами. После успешного завершения процедуры на дисплее блока контроллера
высвечивается значение напряжения питания.
4 Убедиться, что ИБП 24В перешел в нормальный режим по окончании процесса
самотестирования.
5 Выдерживая паузы не менее 5 секунд последовательно включить на БЭР автоматы 5-12 (БВИ
1 – БВИ 8). Должны загореться светодиодные индикаторы на фальшпанелях МПМ и МВИ.
Индикатор CTRL – оранжевый (на МПМ), остальные – зеленые.
Внимание! Одновременное включение нагрузки может привести к падению напряжения и, как
следствие, к ошибкам при запуске микропроцессоров.
6 Убедиться, что все размещенных на БВИ микропроцессорные модули запустились и не
выдают сигналов ошибок. При возникновении сигналов о неисправностях вызвать дежурного
инженера.
376.
Включение ОРМ1 Проверить положение выключателей сенсорных экранов и громкоговорителей. Они должны находятся в
положении «Вкл».
2 Включить источники бесперебойного питания основного и резервного комплектов ОРМ, нажав кнопку
«I» на передней панели. При этом должен загореться индикатор «On Line». В процессе включения ИБП
производит процедуру самотестирования, на непродолжительное время переключаясь в режим работы от
аккумуляторов, при этом загорается индикатор «On Battery».
3 Проверить загорание светодиодных индикаторов и экранов:
на передних панелях источников питания +24В;
на фальшпанелях модулей МПМ и МВВ (на БПИ);
сенсорного монитора;
громкоговорителей.
4 Контролировать запуск ПО СМ (инициализация проходит в течение 1-2 минут и сопровождается
надписями на экране).
5 Критерием окончательной готовности оборудования является переход ОРМ в режим «Стоп» или
«Работа». При возникновении сигналов о неисправностях вызвать дежурного инженера.
Включение СТКУ
1 Включить источник бесперебойного питания СТКУ, нажав кнопку «I» на передней панели. При этом
должен загореться индикатор «On Line». В процессе включения ИБП производит процедуру самотестирования,
на непродолжительное время переключаясь в режим работы от аккумуляторов, при этом загорается индикатор
«On Battery».
2 Включить процессорный блок, нажав кнопку «Power» на передней панели. Должны загореться
светодиодные индикаторы:
на передней панели процессорного блока;
монитора.
3 Происходит инициализация аппаратного обеспечения СКРС, сопровождаемая надписями на экране
монитора.
377.
4 В случае если индикатор входного напряжения на процессорном блоке горит, но инициализация аппаратногообеспечения не происходит, выключить процессорный блок и через 15-30 секунд снова включить его. В том
случае, когда это не приводит к восстановлению нормального
5 Происходит загрузка системного программного обеспечения, а затем прикладного программного
обеспечения. При этом на экране должно появиться окно монитора СТКУ.
Инициализация прикладного ПО занимает некоторое время (около 20 секунд), в течение которого органы
управления окна недоступны. Критерием окончательной готовности оборудования является отображение на
мониторе СТКУ текущих состояний комплектов ОРМ и внешних интерфейсов.
6 Убедиться в отсутствии аварийных сообщений.
7 После успешного окончания процесса загрузки приступить к работе.
8 При обнаружении искажений изображения или отсутствия изображения на экране при нормальном
состоянии всех светодиодных индикаторов произвести повторную загрузку системы путем последовательного
выключения и включения выключателя питания на передней панели процессорного блока.
9 После трех неудачных попыток загрузки системы или нарушения нормального состояния светодиодных
индикаторов выключить выключатель питания “I/0”на передней панели процессорного блока и вызвать
дежурного инженера.
При аварии сети переменного тока устройство бесперебойного питания подает сигнал тревоги
(периодическими тонально-модулированными сигналами), работа аппаратуры может быть продолжена в
основном рабочем режиме в течение 20 мин. За 5 мин. до полного отключения вторичного питания подается
непрерывный звуковой сигнал. При этом необходимо выключить оборудование
378.
379.
380.
381.
382.
383.
384.
АС УВД классифицируются по ряду признаков. Основными из них являютсяобласть применения, назначение, степень автоматизации (номенклатура
автоматизированных функций) и способ получения информации о параметрах
движения ВС.
В зависимости от сферы применения АС УВД различают:
- трассовые (районные);
- аэродромные;
- аэроузловые.
По назначению АС УВД разделяются на:
- АС планирования воздушного движения (АС ПВД);
- АС непосредственного управления воздушным движением (АС УВД);
- совмещенные (АС ПВД и УВД);
- АС управления наземным движением.
По степени автоматизации АС УВД разделяются::
- системы малой (частичной) автоматизации (МАСУВД);
- системы 1-го уровня автоматизации;
- системы 2-го уровня автоматизации;
- системы 3-го уровня автоматизации.
По способу получения координатной информации АС УВД делят:
- системы радиолокационного контроля;
- системы процедурного контроля .
385.
386.
387.
14 марта 2023 г., AviaStat.ru – 10 марта 2023 состоялось итоговое расширенное заседание коллегии Федерального агентствавоздушного транспорта. Об этом сообщает AVIA.RU со ссылкой на данные Росавиации.
В заседании приняли участие представители Контрольного управления Президента Российской Федерации, Счетной Палаты
Российской Федерации, Генпрокуратуры России, Минтранса России, Минпромторга России, МЧС России, МВД России, Росавиации и
территориальных управлений Росавиации, федеральных органов исполнительной власти и региональных властей, а также
руководители авиапредприятий и аэропортов. Заседание проведено в очном формате и в режиме видеоконференции.
Руководитель Федерального агентства воздушного транспорта Александр Нерадько выступил с докладом на тему: «Об итогах работы
Федерального агентства воздушного транспорта за 2022 год, основных задачах на 2023 год и среднесрочную перспективу».
В своем докладе Александр Нерадько отметил, что весь 2022 год отечественная гражданская авиации работала в условиях
беспрецедентных санкций, идущих вразрез с положениями международного воздушного права и основными принципами Чикагской
конвенции. «Именно поэтому результаты работы, которые достигли организации нашей гражданской авиации в условиях
санкционного давления, весьма впечатляющие», - подчеркнул руководитель Росавиации.
Количество пассажиров, перевезенных российскими авиакомпаниями по итогам 2022 года, составило более 95,21 млн пассажиров,
при этом 82% - перевозки на внутренних авиалиниях. Удалось сохранить международное авиасообщение и по состоянию на 10 марта
2023 года прямое авиасообщение осуществляется с 34 иностранными государствами. Международные пассажирские рейсы
выполняют 14 российских авиакомпаний в 22 государства и полеты в Российскую Федерацию выполняют 53 иностранные
авиакомпании из 27 государств. При этом и российские, и иностранные авиакомпании постоянно ведут работу по расширению
еографии полетов.
В 2022 году продолжилась реализация программ субсидирования, направленных на обеспечение доступности перевозок для наших
раждан. По программе субсидирования региональной маршрутной сети (постановление 1242) 23 авиакомпаниями перевезено более
2,7 млн пассажиров по 446 маршрутам. Также по программе обеспечения доступности воздушных перевозок (постановление 215)
более 1,7 млн пассажиров воспользовались льготными перевозками, которые выполняли 12 авиакомпаний по 118 маршрутам. По
программе обеспечения перевозок пассажиров по социально значимым маршрутам Дальневосточного федерального округа
постановление 1172) перевезено 355 тыс пассажиров, полеты выполнялись девятью авиакомпаниями.
Руководитель Росавиации в своем докладе особо подчеркнул, что именно благодаря принятым Президентом России и
Правительством России решениям о государственной поддержке с целью нивелирования санкций, авиакомпании и аэропорты смогли
в 2022 году планомерно продолжить свою деятельность. Гражданская авиация получила 174,2 млрд рублей государственной
388.
389.
390.
При выполнении Росавиацией в 2022 году сертификационных работ приоритетное внимание уделялось перспективной отечественнойавиационной технике. В конце декабря Росавиация выдала одобрения главных изменений в типовую конструкцию самолета МС-21,
связанных с установкой российского двигателя ПД-14 и крыла из композиционных материалов отечественного производства.
Получено одобрение в части расширения возможности эксплуатации самолета МС-21 при низких температурах. Эта работа — основа
для последующего импортозамещения всех агрегатов самолета с тем, чтобы к концу 2024 года сертифицировать полностью
российский самолет и начать его серийное производство.
Также в 2022 году велись работы по сертификации SSJ-95NEW-100 (импортозамещенная версия), Ил-114-300, ТВРС44 «Ладога», ЛМС-901 «Байкал» с двигателями и воздушными винтами отечественной разработки, а также модификаций
вертолетов: Ансат, Ми-171А2, Ка-32А11М, и Ка-226Т «Альпинист». Данные работы будут продолжены в 2023 году.
Для защиты национальных интересов, обеспечения летной годности и безопасности эксплуатации иностранных воздушных судов
Росавиацией в 2022 году одобрено 16 отечественных предприятий в качестве разработчиков модификаций иностранной авиационной
техники и ее компонентов в соответствии с федеральными авиационными правилами. Данные организации получили право
проводить модификации иностранных воздушных судов, направленные на поддержание летной годности в соответствии с
установленной международной практикой. Ожидается дальнейшее увеличение количества отечественных разработчиков
модификаций, а также наращивание компетенций уже одобренных организаций – для этого ведется совместная с Минпромторгом
России работа.
Руководитель Росавиации обозначил и проблемные вопросы, связанные с недофинансированием ряда направлений деятельности
Росавиации. В частности, необходимо выделение средств федерального бюджета на обновление материально-технической базы
учебных заведений семи федеральных казенных предприятий, которые обеспечивают функционирование аэродромной сети
Дальнего Востока и Арктической зоны, поисково-спасательных баз. Необходимо включение в нормативные затраты учебных
заведений гражданской авиации расходов, учитывающих отраслевую специфику, и выделение соответствующих дополнительных
бюджетных ассигнований на реализацию образовательных программ подготовки летных специалистов. По этим направлениям будет
продолжена работа с Минфином России, Минпросвещения России и Минобрнауки России.
В завершение Руководитель Федерального агентства воздушного транспорта Александр Нерадько поблагодарил участников
расширенного заседания коллегии и в их лице коллективы организаций гражданской авиации, также специалистов
взаимодействующих организаций и федеральных органов исполнительной власти, за слаженную и сплоченную работу, которая
осуществлялась в 2022 году.