





















 warfare
warfareSimilar presentations:

: история, понятие, назначение, функции")

")






Общие сведения о БВС и нормативная база, регламентирующая порядок их применения
1.
Тема 1. Общие сведения о БВС и нормативная база,регламентирующая порядок их применения
Занятие 1.1 (лекция)
Общие сведения о БВС
1.
2.
3.
УЧЕБНЫЕ ВОПРОСЫ:
Основные понятия и определения в области беспилотной
авиации. Задачи, решаемые с помощью БВС.
Варианты применения, достоинства и недостатки БВС.
Нормативная правовая база в области регулирования
применения БВС.
1
2.
Рекомендуемая литература:1. Беспилотные летательные аппараты военного назначения:
монография ч.1 –/ В.А. Аладинский, С.В. Богдановский, В.М.
Клименко, В.А. Ромашов. – Череповец: РИО ВВИУРЭ, 2019. – 613 с.
2. Беспилотные летательные аппараты военного назначения:
монография ч.2 –/ В.А. Аладинский, С.В. Богдановский, В.М.
Клименко, В.А. Ромашов. – Череповец: РИО ВВИУРЭ, 2019. – 784 с.
Беспилотные летательные аппараты: справочное пособие. –
Воронеж: Издательско-полиграфический центр «Научная
книга», 2015. – 621 с.
2
3.
1. Основные понятия и определенияв области беспилотной авиации.
Задачи, решаемые с помощью БВС
3
4.
Беспилотное воздушное судно (БВС) – воздушное судно(ВС), управляемое в полете пилотом, находящимся вне борта
такого ВС, или выполняющее автономный полет по заданному
предварительно маршруту (наряду с термином БВС применяется
термин беспилотный летательный аппарат).
Беспилотная авиационная система (БАС) – комплекс взаимосвязанных
элементов, включающий в себя одно или несколько БВС, оборудованными
системами навигации, связи, обмена данными и полезной нагрузкой, средства
обеспечения взлета и посадки БВС, наземные технические средства управления
полетом и обмена данными с полезной нагрузки БВС.
БВС
Полезная
нагрузка
Система
навигации
Система
обмена
данными
Система
связи
БАС
Средства
обеспечения
взлета и
посадки БВС
Наземные
технические
средства управления
полетом и обмена
данными с полезной
нагрузки БВС
4
5.
Полезная нагрузка (ПН) – элементы и подсистемы БВС, предназначенные дляобеспечения эксплуатации БАС в соответствии с функциональным назначением,
расширения функциональных возможностей БАС по назначению, не входящие в
перечень основных подсистем БВС и устанавливаемые (подвешиваемые) на БВС по
мере необходимости.
Фото-видеокамеры, в том числе инфракрасные,
стереоскопические, мультиспектральные, гиперспектральные и пр.
Количество каналов:
- мультиспектральные от 4 до 12;
- гиперспектральные более 1000.
Георадары,
магнитометры
Опрыскиватели
полей
Лидары (лазерные дальномеры)
Датчики мониторинга окружающей среды (газоанализаторы; спектрометры; дозиметры и пр.)
Устройства крепления грузов
(механические и магнитные
захваты).
5
6.
Этап 1: время изобретения радио.Этап 2: самолеты-мишени (1933-1943).
Радиоуправляемый кораблик Н. Тесла
и самолет-снаряд Ч. Каттеринга
Радиоуправляемый самолет-мишень
H.82B Queen Bee
Этапы развития
беспилотной авиации
Этап 3: самолеты-бомбардировщики (1943-1960).
Этап 4: самолетыразведчики (1960-1980).
Этап 5: спутниковая
навигация (1980-2010).
Intarstate TDR-1
Ryan Model 147
RQ-2 Pioneer
Этап 6: миниатюризация
и гражданское
применение (2010-н.в.).
6
7.
Области применения БВСФото-видео съемка
Доставка грузов
Опрыскивание полей
Разведка и нанесение ударов
Перевозка людей
Поиск людей
Картографирование
Охрана территорий
Звуковоспроизведение
7
8.
Сравнение БВС с пилотируемой техникойПреимущества
Недостатки
Влияние времени суток
и погодных условий
Низкая
интеллектуальность
в автономном режиме
Низкая живучесть
конструкции
Ограничения
по массе и составу
полезной нагрузки
Подверженность
каналов управления и
навигации РЭБ
Низкая скрытность
каналов управления
и передачи данных
8
9.
2. Классификация БВС9
10.
Российская классификация БВС по массогабаритным показателямКлассификационный признак
Взлетная
масса, кг
Дальность
действия,
км
Нано-БВС ближнего радиуса действия
до 0,25
до 2
Микро- и мини-БВС ближнего радиуса
до 5
2,5–4,0
Легкие БВС малого радиуса действия
5–50
10–70
Легкие БВС среднего радиуса действия
50–100
70–150
Средние БВС
100–300
150–1000
Средне-тяжелые БВС
300–500
70–300
Тяжелые БВС среднего радиуса действия
500
70–300
Тяжелые БВС большой продолжительности
полета
1500
1500
Беспилотные боевые самолеты
500
1500
10
11.
Классификация БВС по типу конструкцииБВС
Аэростатические
Аэродинамические
Жесткое
крыло
(самолетные)
Вращающееся
крыло
(вертолетные)
Гибкое крыло
(дельтапланы,
парапланы)
Машущее крыло
(орнитоптеры,
энтомоптеры)
11
12.
Классификация и особенности современных БВС самолетного типаКлассическая
схема
Жесткое крыло
(самолетные)
Дисковое крыло
Бесхвостовая
схема
Колеоптер
Тейлситер
Летающее крыло
Плюсы:
- высокая скорость полета;
- большая дальность полета.
Минусы:
- невозможность зависания;
- сложность запуска и посадки.
12
13.
Классификация современных БВС вертолетного типаВращающееся крыло (вертолетные)
Классические
Мультироторные
Гибридные
13
14.
Классификация и особенности классических БВС вертолетного типаОдновинтовые
Двухвинтовые соосные
Плюсы:
- возможность зависания;
- простота запуска и посадки
Классические
Двухвинтовые
поперечные
Двухвинтовые
перекрещивающиеся
Двухвинтовые
продольные
Минусы:
- низкая скорость;
- малая дальность полета
14
15.
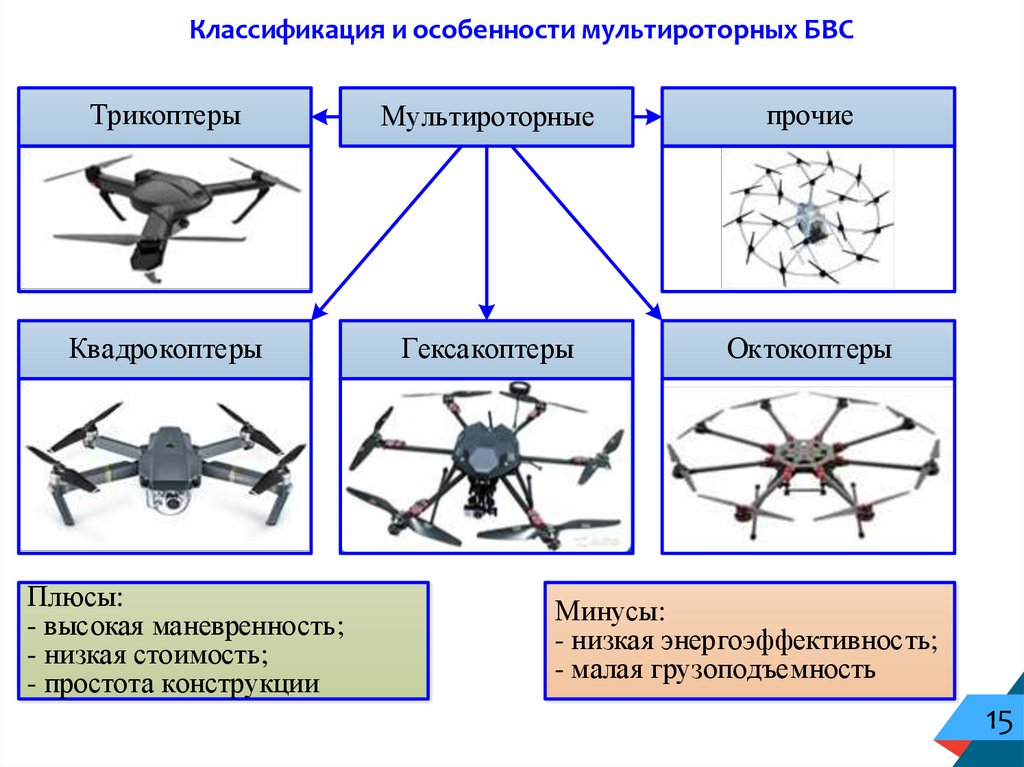
Классификация и особенности мультироторных БВСТрикоптеры
Мультироторные
прочие
Квадрокоптеры
Гексакоптеры
Октокоптеры
Плюсы:
- высокая маневренность;
- низкая стоимость;
- простота конструкции
Минусы:
- низкая энергоэффективность;
- малая грузоподъемность
15
16.
Классификация и особенности гибридных БВСГибридные
Винтокрылы
Конвертопланы
Плюсы:
- обладают достоинствами вертолетных (зависание, вертикальный
взлет-посадка)
и
самолетных
(скорость и дальность полета) БВС
Автожиры
Минусы:
- увеличенная сложность;
- грузоподъемность, дальность и
время полета ниже чем у самолетных
16
17.
3. Способы управления БВС и методыоценки своего положения
17
18.
3.1. Способы управления БВССтепень
автономности
Дистанционное
пилотирование
Визуальный
контроль
FPV-система
Дистанционное
управление
Контроль
через НПУ
Автономный
полет
По миссии
По цели
18
19.
Визуальный контрольПередача непосредственных команд
управления полетом
БВС в условиях
прямой видимости
Плюсы:
- простота конструкции;
- скорость оценки ситуации
Минусы:
- ограничение дальности полета;
- сложность в освоении
19
20.
FPV-система (вид от первого лица)First Person View
Передача непосредственных
команд управления полетом,
наблюдение через
фронтальную камеру
Плюсы:
- удобство пилотирования;
- высокая скорость оценки ситуации
Минусы:
- подверженность радиопомехам;
- высокая сложность освоения
20
21.
Дистанционное управлениеПримеры высокоуровневых команд
2) полет в заданную точку
3) посадка
1) взлет
Плюсы:
- простота управления;
- значительная дальность полета
Минусы:
- задержка реагирования в
нештатных ситуация
21
22.
Автономный полетплана
по миссии
по цели
Окончание
полета
после
выполнения
задания
Плюсы:
- простота управления;
- дальность полета не зависит
от канала управления
Минусы:
- необходимо дополнительное
оборудование;
- задержка реагирования
22
23.
Типуправления
Визуальный
FPV
Полуавтономный
По миссии
По цели
Зона
видимости
до 300 м
Ближняя
радиовидимость
0,3-1 км
Дальняя
радиовидимость
5-10 км
Дальность
полета
Неограниченно
Неограниченно
Пульт
управления
Пульт
управления,
FPV камера,
очки
Оборудование
НПУ
(НСУ)
НПУ
(НСУ)
НПУ, датчики,
бортовой
вычислитель
Сложность
управления
Сложно,
Неудобно
Сложно,
удобно
Нормально
Нормально
Просто
Реагирование на
обстановку
Мгновенное
Мгновенное Затрудненное Невозможно Невозможно
23
24.
3.2. Способы оценки положения БВСГлобальные навигационные системы:
GPS (США), Galileo (ЕС), ГЛОНАСС (РФ) и BeiDou (КНР)
Региональные навигационные системы:
DORIS (Франция), IRNSS (Индия), QZSS (Япония)
Минимально необходимое
количество спутников для
определения местоположения
Глобальные навигационные спутниковые системы (ГНСС)
24
25.
Системы дифференциальной коррекции ГНССDGNSS (Differential Global
Navigation Satellite System)
RTK (Real-Time Kinematic)
ПРД
(точность измерений повышается за счет
передачи поправок псевдодальностей с
опорной станции, координаты которой
заранее известны)
БС
(на базовой станции для расчета поправок
используются измерения фазы несущей
одновременно на двух приёмниках, после
поправки передаются по радиосигналу)
25
26.
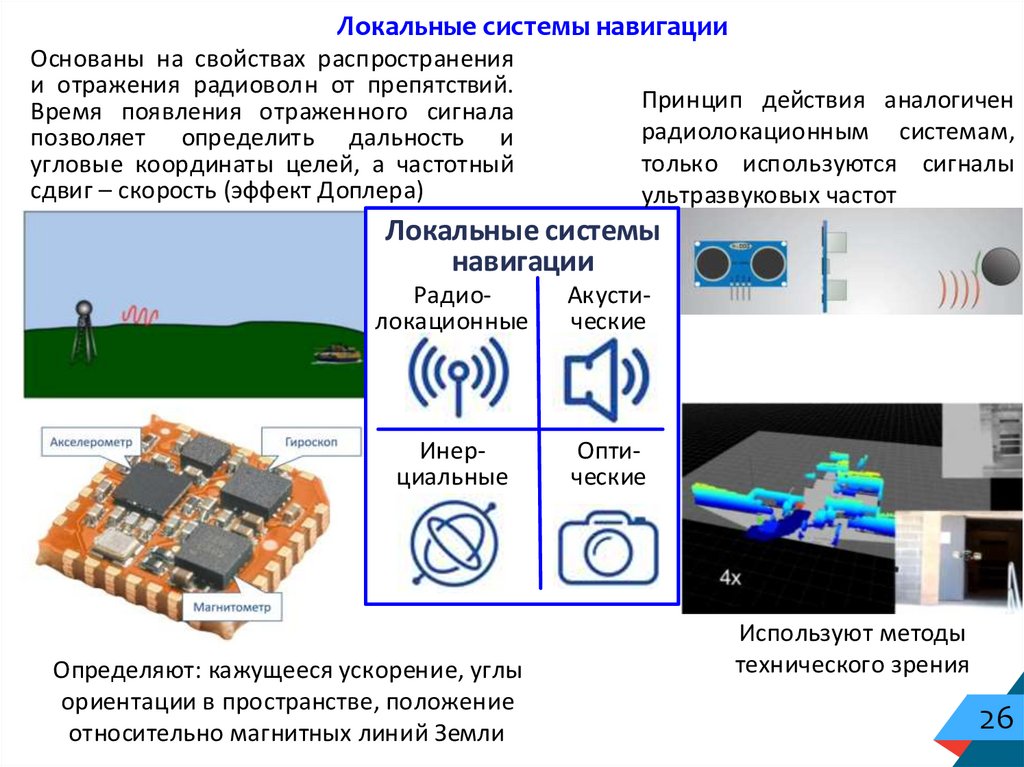
Локальные системы навигацииОснованы на свойствах распространения
и отражения радиоволн от препятствий.
Время появления отраженного сигнала
позволяет определить дальность и
угловые координаты целей, а частотный
сдвиг – скорость (эффект Доплера)
Принцип действия аналогичен
радиолокационным системам,
только используются сигналы
ультразвуковых частот
Локальные системы
навигации
Радиолокационные
Акустические
Инерциальные
Оптические
Определяют: кажущееся ускорение, углы
ориентации в пространстве, положение
относительно магнитных линий Земли
Используют методы
технического зрения
26