
 warfare
warfareSimilar presentations:










Измерители времени запаздывания (дальности). Лекция 14
1.
2.
Военный учебный центрим. Героя Российской Федерации
генерала армии Дубынина В.П.
Дисциплина
«Основы теории радиолокационных
систем и комплексов»
1
3.
Лекция № 14«Измерители времени запаздывания
(дальности)»
2
4.
Учебная цель:1. Дать характеристику схемам построения
неследящих измерителей времени запаздывания,
частоты и угловых координат радиолокационных
целей, раскрыв содержание принципов их
работы и основных факторов, обусловливающих
точность оценки измеряемых параметров.
3
5.
Вопросы лекции:1.
2.
Неследящие измерители дальности обзорного типа;
Дискриминаторные измерители времени запаздывания;
4
6.
Литературадля самостоятельной работы:
1. Радиолокационные системы: учебник / В.П.
Бердышев, Е.Н. Гарин, А.Н. Фомин [и др.]; под
общ. ред. В.П. Бердышева. – Красноярск : Сиб.
федер. ун-т. -2011. -400с.
2. Бакулев
П.А.
Радиолокационные
системы:
учебник для вузов.-М.: Радиотехника, 2004,
320с.,ил.
3. Радиоэлектронные системы: Основы построения и
теория. Справочник. Изд. 2-е, перераб. и доп. / Под
ред. Я.Д. Ширмана. -.М.: Радиотехника, 2007.
-512с.: ил.
5
7.
Учебный вопрос №1Неследящие измерители дальности обзорного типа.
6
8.
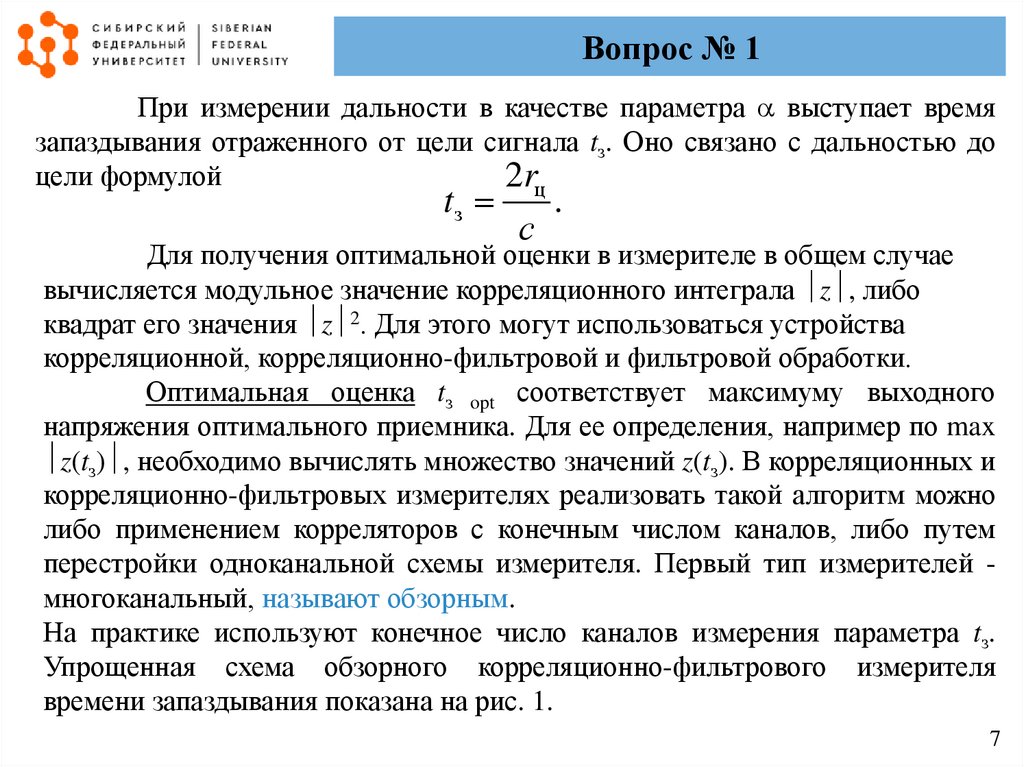
Вопрос № 1При измерении дальности в качестве параметра выступает время
запаздывания отраженного от цели сигнала tз. Оно связано с дальностью до
цели формулой
2rц
tз
с
.
Для получения оптимальной оценки в измерителе в общем случае
вычисляется модульное значение корреляционного интеграла z , либо
квадрат его значения z 2. Для этого могут использоваться устройства
корреляционной, корреляционно-фильтровой и фильтровой обработки.
Оптимальная оценка tз opt соответствует максимуму выходного
напряжения оптимального приемника. Для ее определения, например по max
z(tз) , необходимо вычислять множество значений z(tз). В корреляционных и
корреляционно-фильтровых измерителях реализовать такой алгоритм можно
либо применением корреляторов с конечным числом каналов, либо путем
перестройки одноканальной схемы измерителя. Первый тип измерителей многоканальный, называют обзорным.
На практике используют конечное число каналов измерения параметра tз.
Упрощенная схема обзорного корреляционно-фильтрового измерителя
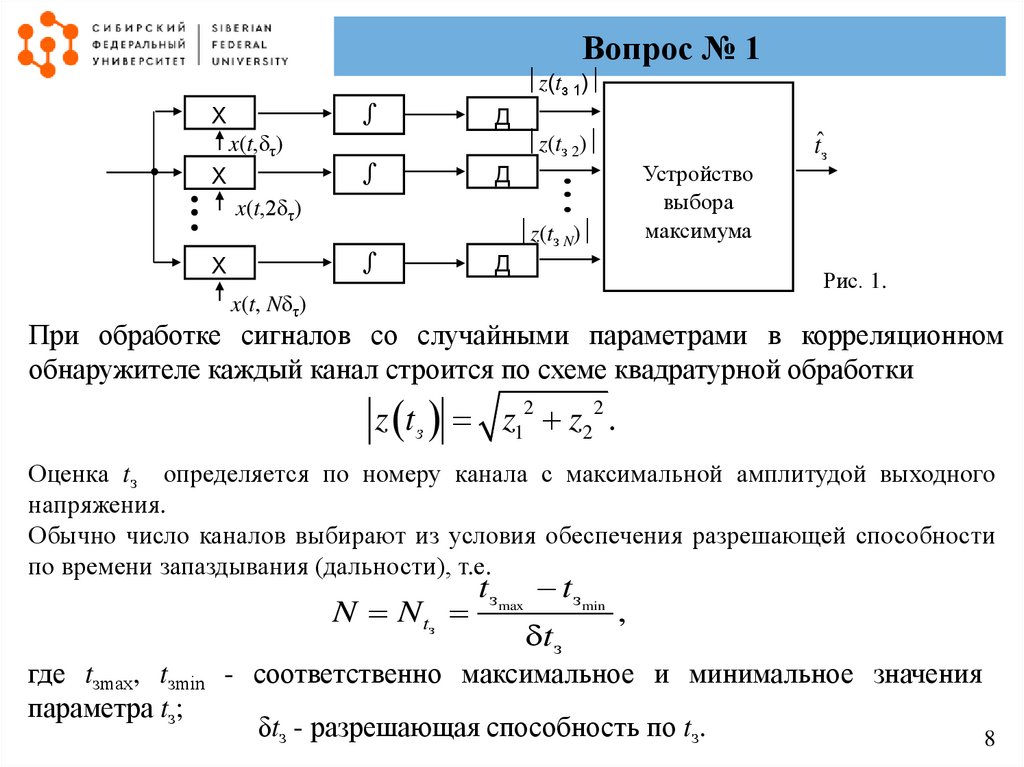
времени запаздывания показана на рис. 1.
7
9.
Вопрос № 1z(tз 1)
X
∫
Д
∫
Д
x(t,δτ)
X
x(t,2δτ)
Устройство
выбора
максимума
z(tз N)
∫
X
z(tз 2)
Д
tˆз
Рис. 1.
x(t, Nδτ)
При обработке сигналов со случайными параметрами в корреляционном
обнаружителе каждый канал строится по схеме квадратурной обработки
z t з z12 z2 2 .
Оценка tз определяется по номеру канала с максимальной амплитудой выходного
напряжения.
Обычно число каналов выбирают из условия обеспечения разрешающей способности
по времени запаздывания (дальности), т.е.
N N tз
tзmax tзmin
tз
,
где tзmax, tзmin - соответственно максимальное и минимальное значения
параметра tз;
δtз - разрешающая способность по tз.
8
10.
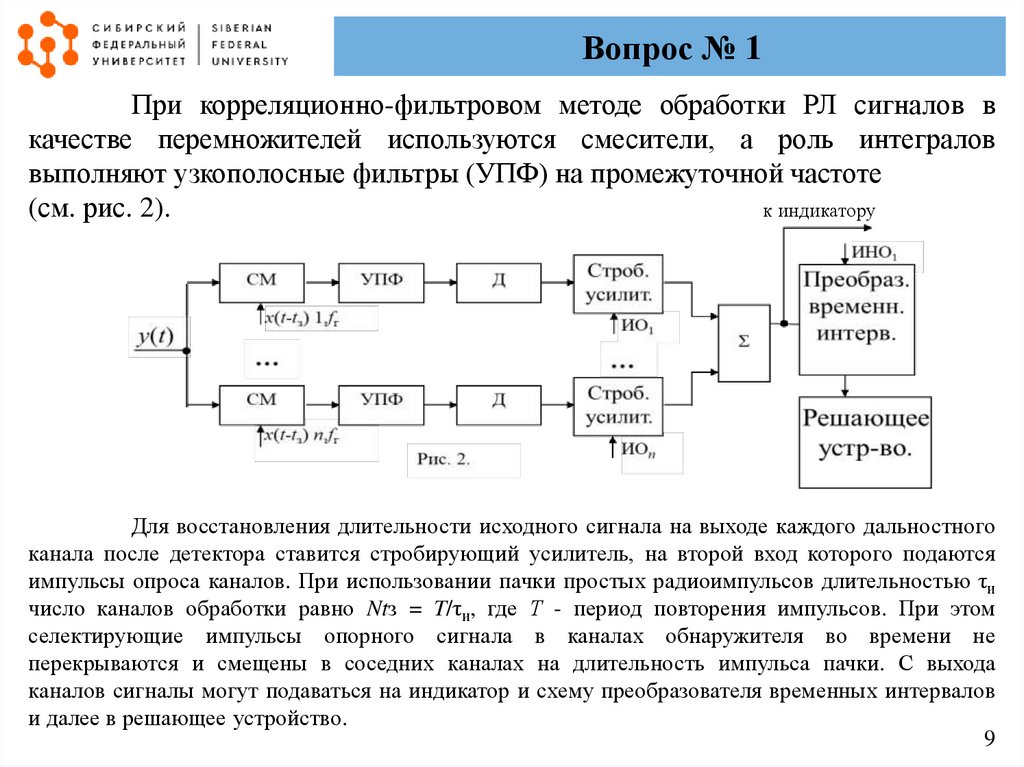
Вопрос № 1При корреляционно-фильтровом методе обработки РЛ сигналов в
качестве перемножителей используются смесители, а роль интегралов
выполняют узкополосные фильтры (УПФ) на промежуточной частоте
(см. рис. 2).
к индикатору
Для восстановления длительности исходного сигнала на выходе каждого дальностного
канала после детектора ставится стробирующий усилитель, на второй вход которого подаются
импульсы опроса каналов. При использовании пачки простых радиоимпульсов длительностью τи
число каналов обработки равно Ntз = T/τи, где Т - период повторения импульсов. При этом
селектирующие импульсы опорного сигнала в каналах обнаружителя во времени не
перекрываются и смещены в соседних каналах на длительность импульса пачки. С выхода
каналов сигналы могут подаваться на индикатор и схему преобразователя временных интервалов
и далее в решающее устройство.
9
11.
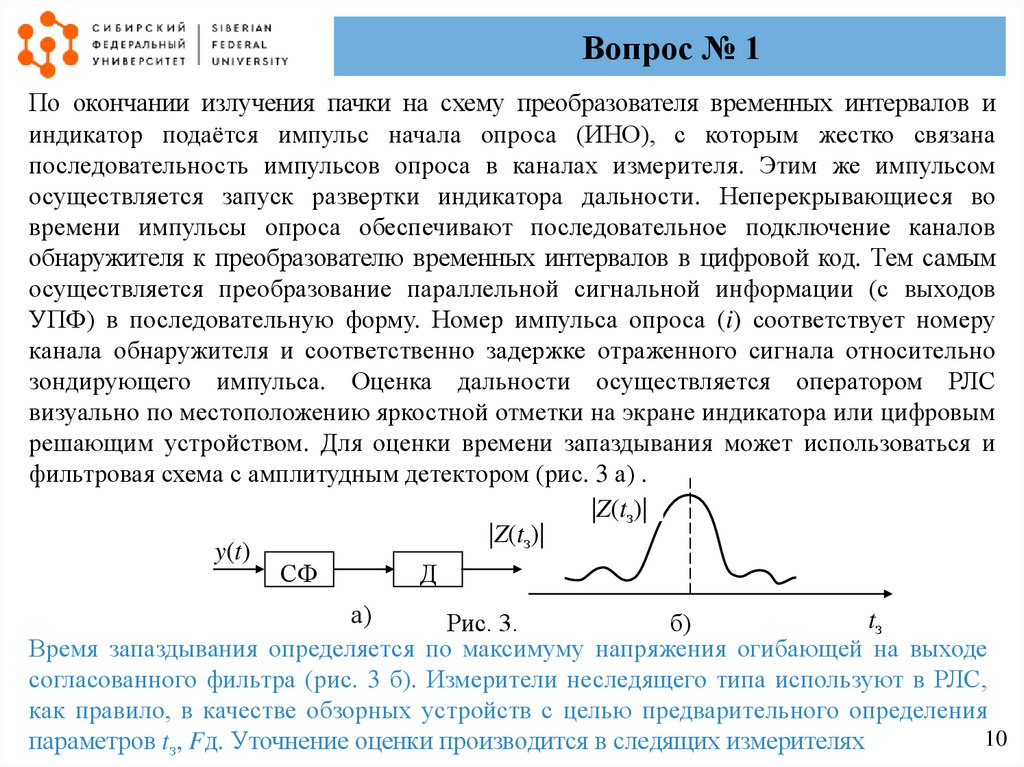
Вопрос № 1По окончании излучения пачки на схему преобразователя временных интервалов и
индикатор подаётся импульс начала опроса (ИНО), с которым жестко связана
последовательность импульсов опроса в каналах измерителя. Этим же импульсом
осуществляется запуск развертки индикатора дальности. Неперекрывающиеся во
времени импульсы опроса обеспечивают последовательное подключение каналов
обнаружителя к преобразователю временных интервалов в цифровой код. Тем самым
осуществляется преобразование параллельной сигнальной информации (с выходов
УПФ) в последовательную форму. Номер импульса опроса (i) соответствует номеру
канала обнаружителя и соответственно задержке отраженного сигнала относительно
зондирующего импульса. Оценка дальности осуществляется оператором РЛС
визуально по местоположению яркостной отметки на экране индикатора или цифровым
решающим устройством. Для оценки времени запаздывания может использоваться и
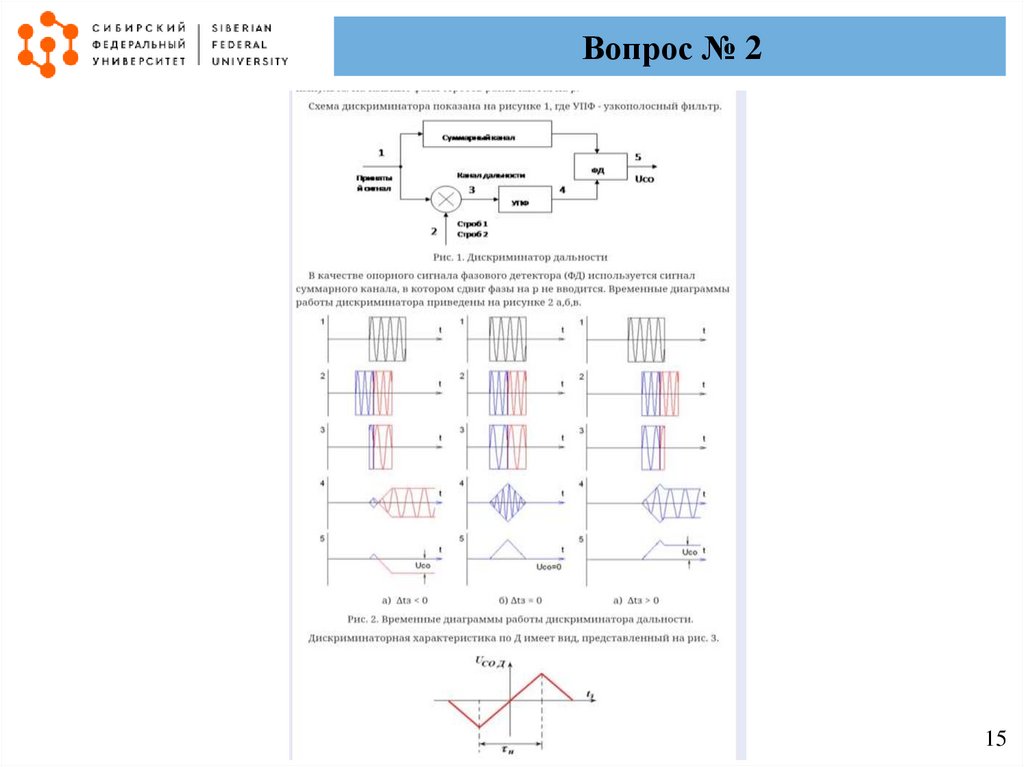
фильтровая схема с амплитудным детектором (рис. 3 а) .
|Z(tз)|
|Z(tз)|
y(t)
СФ
Д
а)
tз
Рис. 3.
б)
Время запаздывания определяется по максимуму напряжения огибающей на выходе
согласованного фильтра (рис. 3 б). Измерители неследящего типа используют в РЛС,
как правило, в качестве обзорных устройств с целью предварительного определения
10
параметров tз, Fд. Уточнение оценки производится в следящих измерителях
12.
Вопрос № 1Вывод по первому вопросу:
Неследящие обзорные измерители времени запаздывания строятся в
основном по принципу схем параллельного анализа.
Они являются многоканальными, количество их каналов определяется
характеристиками РЛС.
11
13.
Учебный вопрос №2Дискриминаторные измерители времени
запаздывания.
12
14.
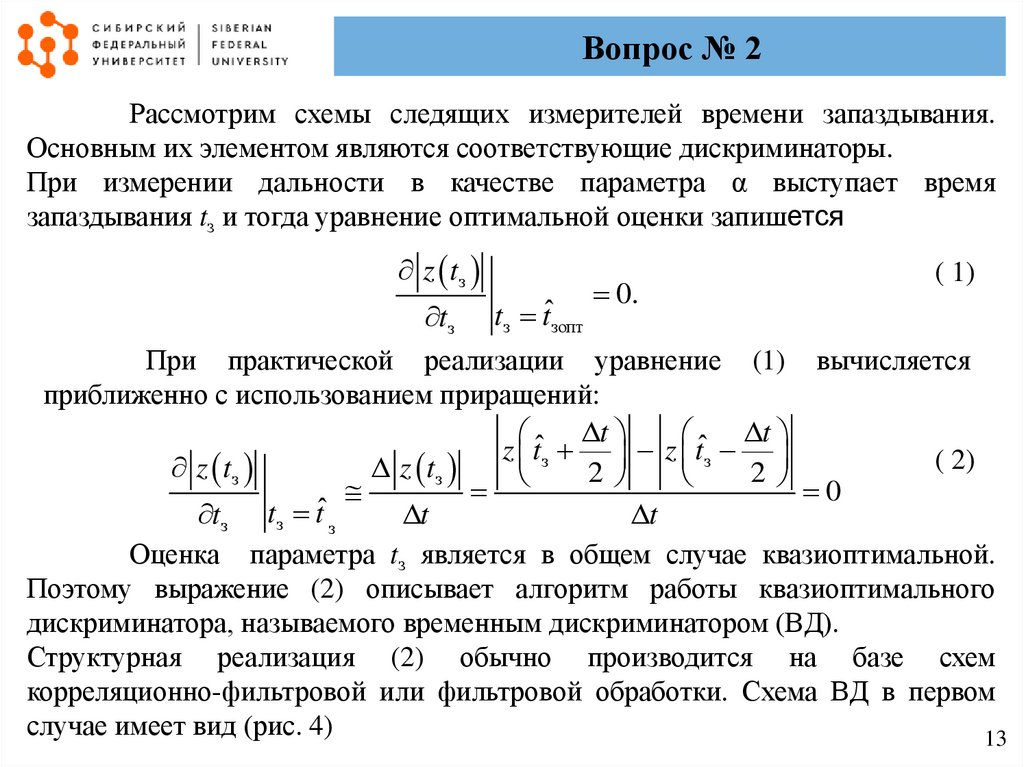
Вопрос № 2Рассмотрим схемы следящих измерителей времени запаздывания.
Основным их элементом являются соответствующие дискриминаторы.
При измерении дальности в качестве параметра α выступает время
запаздывания tз и тогда уравнение оптимальной оценки запишется
z tз
tз tˆзопт
0.
( 1)
tз
При практической реализации уравнение (1) вычисляется
приближенно с использованием приращений:
t
t
z tˆз z tˆз
( 2)
z tз
z tз
2
2
0
ˆ
t
t
tз
t
t
з
з
Оценка параметра tз является в общем случае квазиоптимальной.
Поэтому выражение (2) описывает алгоритм работы квазиоптимального
дискриминатора, называемого временным дискриминатором (ВД).
Структурная реализация (2) обычно производится на базе схем
корреляционно-фильтровой или фильтровой обработки. Схема ВД в первом
случае имеет вид (рис. 4)
13
15.
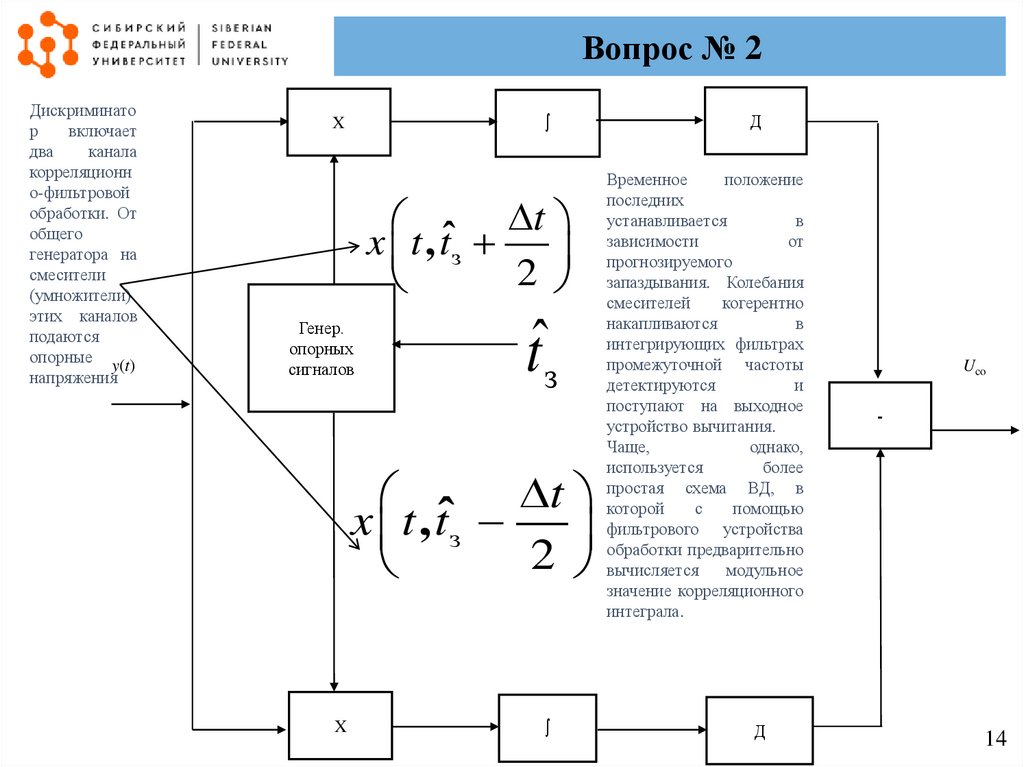
Вопрос № 2Дискриминато
р
включает
два
канала
корреляционн
о-фильтровой
обработки. От
общего
генератора на
смесители
(умножители)
этих каналов
подаются
опорные y(t)
напряжения
∫
X
ˆ t
x t , tз
2
Генер.
опорных
сигналов
tˆз
ˆ t
x t , tз
2
X
∫
Д
Временное
положение
последних
устанавливается
в
зависимости
от
прогнозируемого
запаздывания. Колебания
смесителей
когерентно
накапливаются
в
интегрирующих фильтрах
промежуточной частоты
детектируются
и
поступают на выходное
устройство вычитания.
Чаще,
однако,
используется
более
простая схема ВД, в
которой
с
помощью
фильтрового устройства
обработки предварительно
вычисляется
модульное
значение корреляционного
интеграла.
Д
Uco
-
14
16.
Вопрос № 215
17.
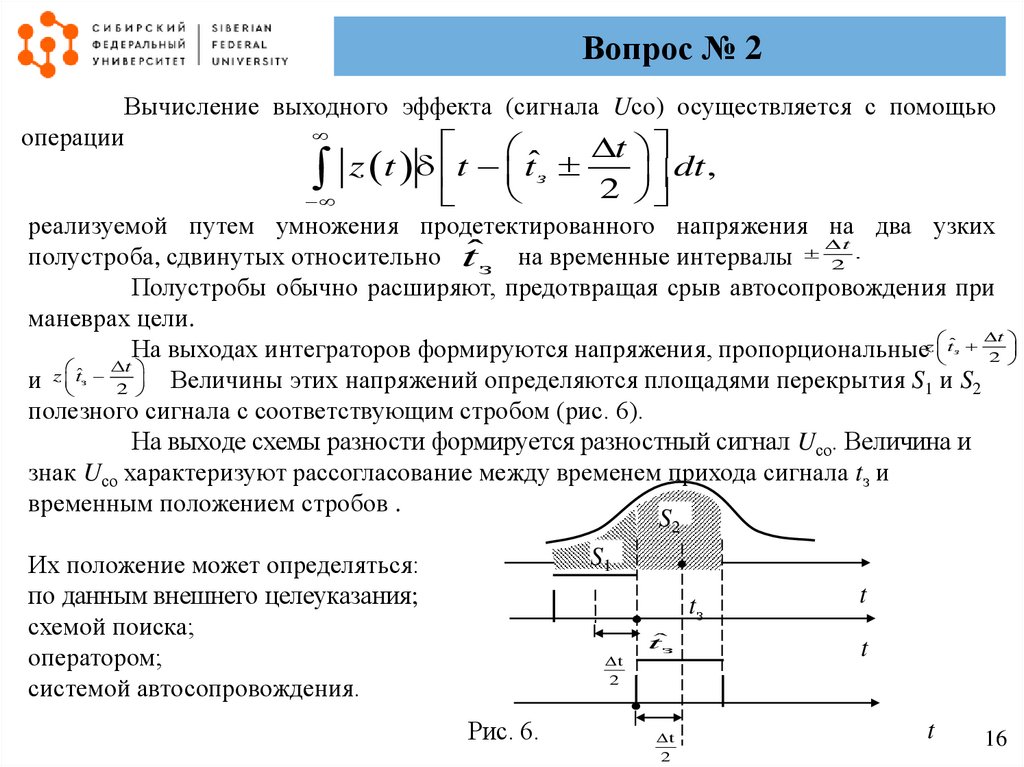
Вопрос № 2Вычисление выходного эффекта (сигнала Uсо) осуществляется с помощью
операции
t
ˆ
z
t
t
t
з
dt ,
2
реализуемой путем умножения продетектированного напряжения на два узких
t
полустроба, сдвинутых относительно tˆз на временные интервалы 2 .
Полустробы обычно расширяют, предотвращая срыв автосопровождения при
маневрах цели.
t
На выходах интеграторов формируются напряжения, пропорциональныеz tˆ 2
t
и z tˆ 2 Величины этих напряжений определяются площадями перекрытия S1 и S2
полезного сигнала с соответствующим стробом (рис. 6).
На выходе схемы разности формируется разностный сигнал Ucо. Величина и
знак Ucо характеризуют рассогласование между временем прихода сигнала tз и
временным положением стробов .
S2
S1
Их положение может определяться:
t
по данным внешнего целеуказания;
tз
схемой поиска;
ˆ
t
t
t
оператором;
2
системой автосопровождения.
з
з
з
Рис. 6.
t
2
t
16
18.
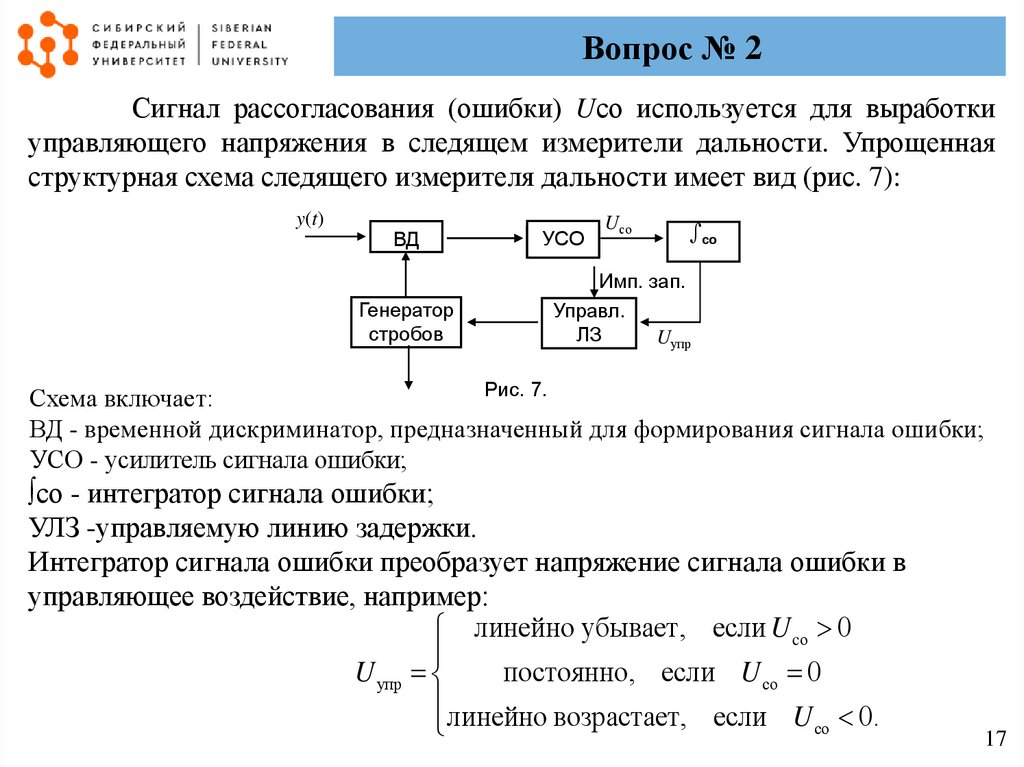
Вопрос № 2Сигнал рассогласования (ошибки) Ucо используется для выработки
управляющего напряжения в следящем измерители дальности. Упрощенная
структурная схема следящего измерителя дальности имеет вид (рис. 7):
y(t)
ВД
Генератор
стробов
УСО
Uсо
∫со
Имп. зап.
Управл.
ЛЗ
Uупр
Рис. 7.
Схема включает:
ВД - временной дискриминатор, предназначенный для формирования сигнала ошибки;
УСО - усилитель сигнала ошибки;
со - интегратор сигнала ошибки;
УЛЗ -управляемую линию задержки.
Интегратор сигнала ошибки преобразует напряжение сигнала ошибки в
управляющее воздействие, например:
линейно убывает, если U cо 0
U упр
постоянно, если U со 0
линейно возрастает, если U 0.
со
17
19.
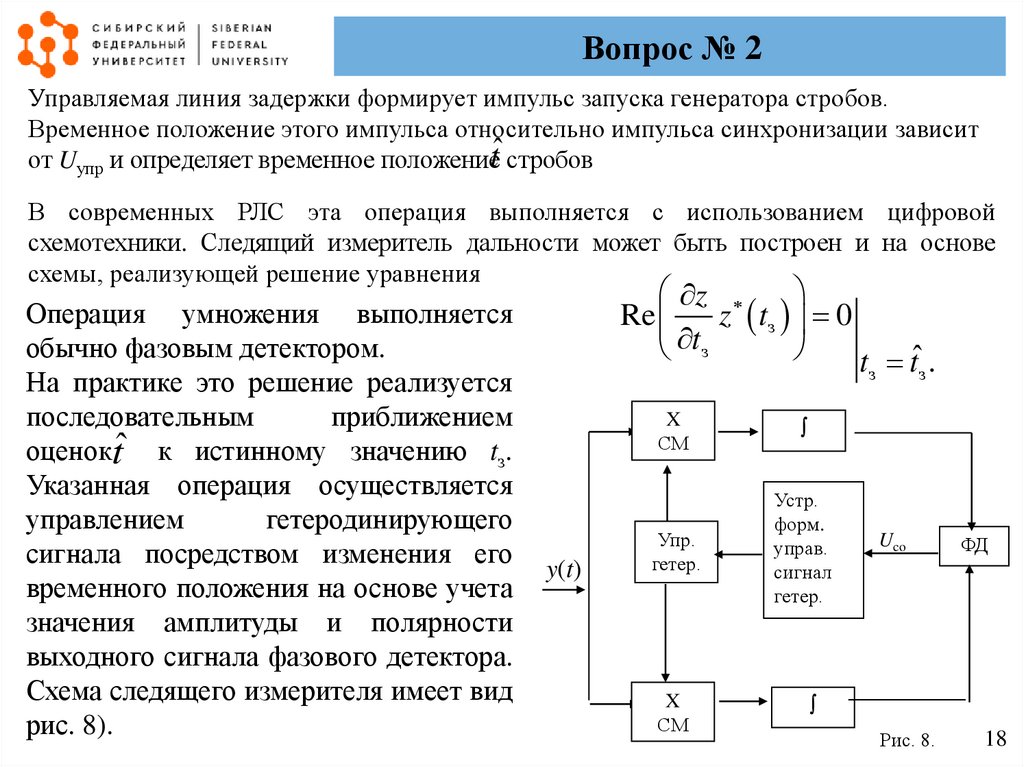
Вопрос № 2Управляемая линия задержки формирует импульс запуска генератора стробов.
Временное положение этого импульса относительно импульса синхронизации зависит
от Uупр и определяет временное положениеtˆ стробов
В современных РЛС эта операция выполняется с использованием цифровой
схемотехники. Следящий измеритель дальности может быть построен и на основе
схемы, реализующей решение уравнения
Операция умножения выполняется
обычно фазовым детектором.
На практике это решение реализуется
последовательным
приближением
оценокtˆ к истинному значению tз.
Указанная операция осуществляется
управлением
гетеродинирующего
сигнала посредством изменения его
временного положения на основе учета
значения амплитуды и полярности
выходного сигнала фазового детектора.
Схема следящего измерителя имеет вид
рис. 8).
z
Re
z tз 0
tз
tз tˆз .
y(t)
X
СМ
Упр.
гетер.
Устр.
форм.
управ.
сигнал
гетер.
X
СМ
Uco
ФД
Рис. 8.
18
20.
Вопрос № 2Дискриминатор имеет 2 канала. Первый канал вычисляет значение
корреляционного интеграла при ожидаемом сигнале x t tˆз , f г смещенном
во времени относительно зондирующего на значение tˆз Второй канал
формирует напряжение, пропорциональное первой производной Z (tˆз ) . Это
достигается соответствующим формированием опорного сигнала, подаваемого
на смеситель.
Когда центр опорного сигнала второго канала совпадает с серединой
входного сигнала x(t-tз), выходной сигнал второго канала равен нулю.
Выходной сигнал первого канала измерителя (оптимального обнаружителя)
максимален.
При наличии расстройки по времени запаздывания фаза колебаний
сигнала во втором канале дискриминатора определяется знаком
рассогласования, а амплитуда - величиной указанного рассогласования. На
выходе ФД формируется искомый сигнал ошибки, который равен нулю, только
когда t з tˆопт .
z
t з
На практике могут использоваться схемы, в которых
вычисляется методом конечной разности. В этом случае следящий измеритель
z t з
будет трехканальным: один канал вычисляет z( tˆз), а два вычисляют
в
t з
точке t з tˆз
19
21.
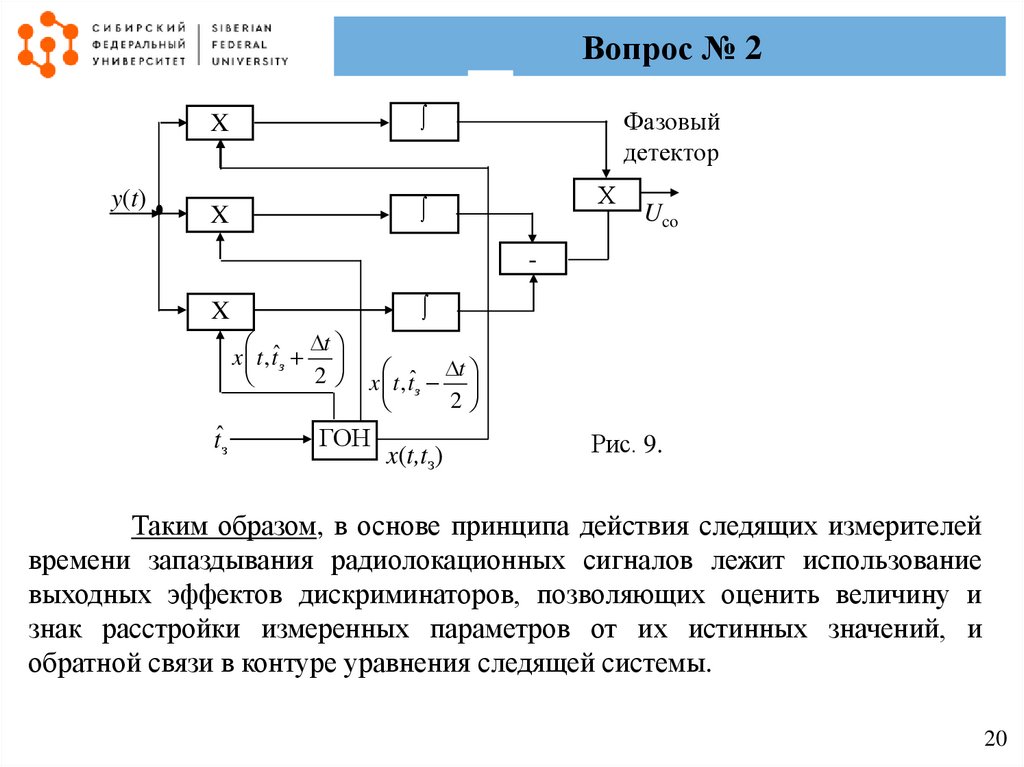
Вопрос № 2y(t)
X
∫
X
∫
Фазовый
детектор
Х
Uco
∫
X
t
x t , tˆз
2
tˆз
t
x t , tˆз
2
ГОН
x(t,tз)
Рис. 9.
Таким образом, в основе принципа действия следящих измерителей
времени запаздывания радиолокационных сигналов лежит использование
выходных эффектов дискриминаторов, позволяющих оценить величину и
знак расстройки измеренных параметров от их истинных значений, и
обратной связи в контуре уравнения следящей системы.
20
22.
Вопрос № 2Вывод по второму вопросу:
В основе принципа действия следящих измерителей времени
запаздывания радиолокационных сигналов лежит использование выходных
эффектов дискриминаторов, позволяющих оценить величину и знак
расстройки измеренных параметров от их истинных значений, и обратной
связи в контуре уравнения следящей системы.
21
23.
Заключение и указания по отработке материала лекции:1. Оптимальные измерители времени запаздывания радиолокационных
сигналов могут быть выполнены по схемам неследящего и следящего
измерений.
2. При неследящем измерении наибольшее распространение нашли
многоканальные схемы обзорного типа, каждый канал в которых
настроен на определенное значение измеряемого параметра.
3. Для реализации следящего измерения в состав измерителей входят
соответствующие дискриминаторы.
4. Принцип работы оптимальных измерителей основан на численных
методах поиска экстремальных значений оцениваемых параметров.
5. Точность оценки времени запаздывания радиолокационных сигналов
зависит как от энергетического отношения сигнал/помеха, так и формы
сигнала и его спектральных характеристик.
22
24.
Задание на самоподготовкуМатериал лекции отработать в соответствии с
рекомендуемой литературой.
ОСНОВНАЯ
• 1. Радиолокационные системы: учебник / В.П. Бердышев, Е.Н. Гарин,
А.Н. Фомин [и др.]; под общ. ред. В.П. Бердышева. – Красноярск : Сиб.
федер. ун-т. -2011. -400с.
ДОПОЛНИТЕЛЬНАЯ
• 2. Бакулев П.А. Радиолокационные системы: учебник для вузов. М.:
Радиотехника, 2004, 320с.,ил.
• 3. Радиоэлектронные системы: Основы построения и теория.
Справочник. Изд. 2-е, перераб. и доп. / Под ред. Я.Д. Ширмана. -.М.:
Радиотехника, 2007. -512с.: ил.
23
25.
Спасибо за внимание24