




 2. Навигация глобальная (GPS) 3. Выбор траектории движения (с")





 management
managementSimilar presentations:










Беспилотная внедорожная транспортная платформа (БВТП)
1.
Беспилотная внедорожнаятранспортная платформа
(БВТП)
ЮГУ, 2024
2.
Цель: Создание технических средств системырегулярной доставки контейнерных, крупногабаритных
и тяжеловесных грузов в труднодоступные регионы
Ханты-Мансийского автономного округа – Югры (и в
другие регионы России) без организации дорог.
Задачи:
1. Создание беспилотной колесной транспортной платформы для
доставки грузов по замерзшим рекам региона (зимний период);
2. Решение проблемы «последней мили»: доставка грузов с
берега реки в пункт назначения по болотистой местности
(совместное использование БВТП с речным транспортом в
летний период).
2
3.
Беспилотность–
использование
современных технологий в области
робототехники
и
искусственного
интеллекта для решения проблемы
безопасности
человека
в
труднодоступных
местах
с
экстремальными погодными условиями
без
развертывание
специальной
инфраструктуры.
3
4.
Внедорожность – отказ от дорожныхстандартов позволит:
• создать шасси с максимальной
остойчивостью (форма шасси –
квадрат или круг);
• обеспечить минимальное давление
на грунт (большое пятно контакта с
опорной поверхностью).
4
5.
Современное состояние проблемымобильных вездеходных платформ
(транспортных средств)
5
6. Гусеничные и колесные аналоги
67. Всенаправленные аналоги
Групповое движение( https://www.yandex.ru/video/preview/8231474888784854063 )
Балансир
( https://www.yandex.ru/video/preview/14123450023778418303 )
7
8.
Проблемы современных транспортных платформпри доставке грузов по бездорожью
• Узкие гусеничные шасси (посадка
днище на «мягкой» поверхности);
на
• Низкая грузоподъемность колесных шасси
(высокий клиренс – высоко расположен
центр тяжести – низкая остойчивость);
• Всенаправленные шасси работают только
на твердых поверхностях.
8
9.
Принципиальные проблемы1. Торможение
поверхность;
днищем
об
опорную
2. Статические и динамические нагрузки,
влияющие на маневренность, курсовую
устойчивость
и
длительность
эксплуатации (надежность), между:
- элементами шасси;
- шасси и грунтом.
9
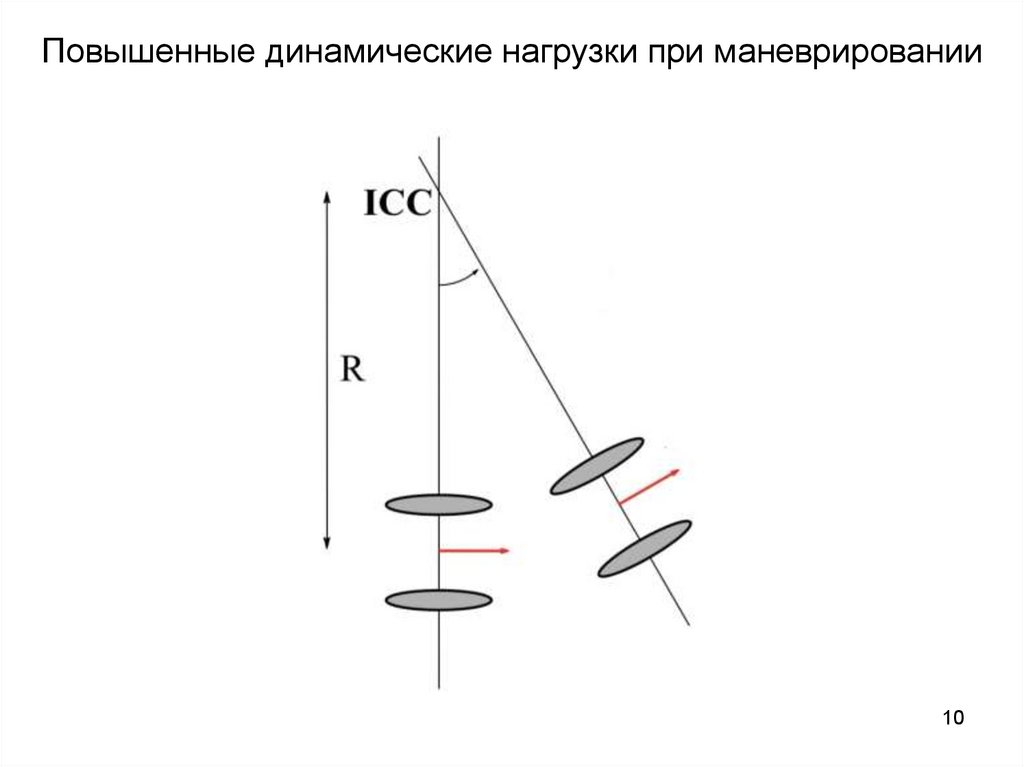
10.
Повышенные динамические нагрузки при маневрировании10
11. Решение Проекта
Многоколесноешасси
на
базе
всенаправленных колес, адаптированных
для работы на «мягких» поверхностях:
• многоколесность – изоляция днища
кузова от опорной поверхности;
• всенаправленность
колес
–
минимизация
статических
и
динамических напряжений в шасси +
произвольный вектор движение без
поворота транспортной платформы.
11
12. Технологии общие: 1. Навигация на местности (компьютерное зрение) 2. Навигация глобальная (GPS) 3. Выбор траектории движения (с
Выбор типа проектаТехнологии общие:
1. Навигация на местности (компьютерное зрение)
2. Навигация глобальная (GPS)
3. Выбор траектории движения (с учетом технических
особенностей и рельефа)
Технический:
Исключить недостатки готового:
1. Адаптивная независимая
подвеска (для колесной
техники)
2. Определение момента на
колесах (не буксовать, для
обеспечения максимального
«зацепа»)
Инновационный:
1. Технология создания колеса
2. Управление роликами
3. Синхронизация колес
4. Выбор вектора движения
5. Адаптивная независимая
подвеска (равномерный
«зацеп», «давление»…)
12
13. Уровни реализации проекта
1. Имитационнаядвойник);
модель
(цифровой
2. Прототип 1х1 метр;
3. Полигон («песочница»).
13
14. Фазы создания прототипа БВТП
1415.
Всенаправленное движение в вязкой среде15
16. Технологии и исполнители
Сотрудники ЮГУТехнологии и исполнители
16
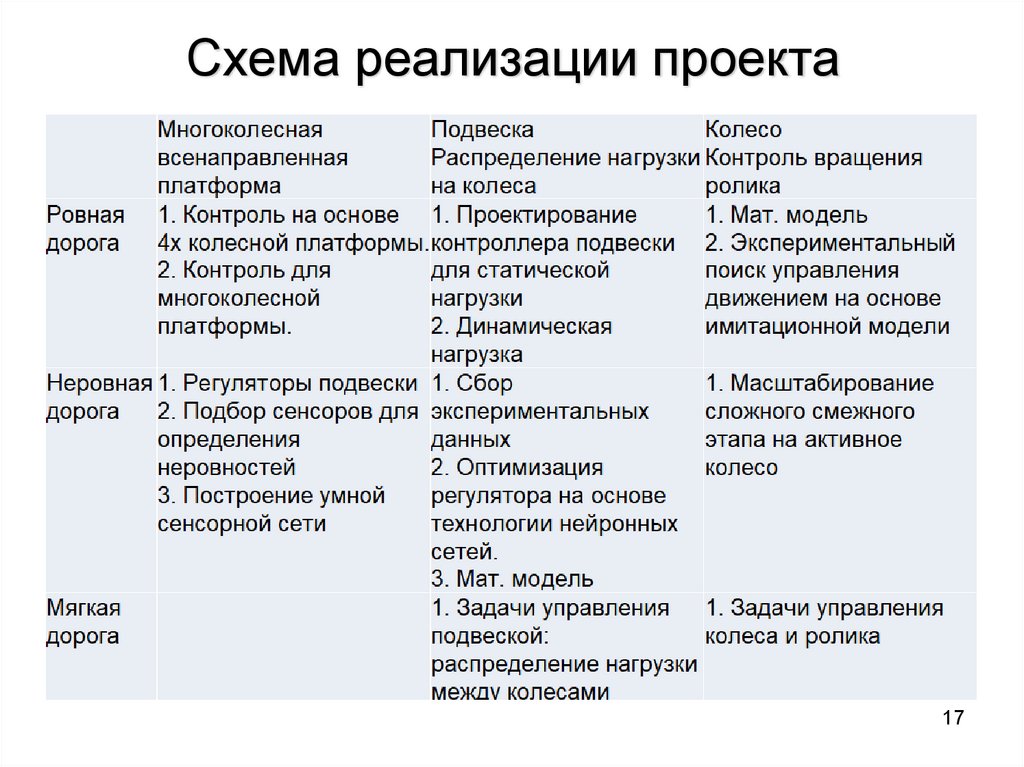
17.
Схема реализации проекта17
18. Задел и потребности
1819.
Особенности продукта• Распределение крутящего момента по всей
поверхности транспортной платформы
(антипроскальзывание
в
среде
с
ограниченным трением);
• Низкое давление на поверхность
большое пятно контакта с поверхностью
(движение в заснеженной и заболоченной
местности);
• Контроль скорости вращения каждого
колеса (минимизация нагрузок в/на шасси).
19
20.
Краткосрочный план20