

 physics
physicsSimilar presentations:



")






Ультразвуковые датчики
1. Ультразвуковые датчики
Принцип работыУльтразвуковые
волны
формируются
при
помощи
электроакустического
преобразователя
(пьезоэлектрический
эффект), который преобразует подводимую электрическую
энергию
в
механические
колебания
посредством
пьезоэлектричества или магнитострикции (рис. 22).
Рис. 22 Принцип электроакустического преобразователя
2.
Принцип работы заключается в измерении времени,необходимого звуковой волне на перемещение межу датчиком и
объектом. Скорость перемещения в воздухе составляет 340 м/с при
температуре 20°С, т.е. на обнаружение с расстояния в 1 м
требуется 3 мс. Это время измеряется при помощи счетчика,
встроенного в микроконтроллер.
Достоинствами ультразвуковых датчиков являются большое
расстояние обнаружения (до 10 м) и возможность обнаруживать
любые объекты, отражающие звук, независимо от их формы и
цвета.
3.
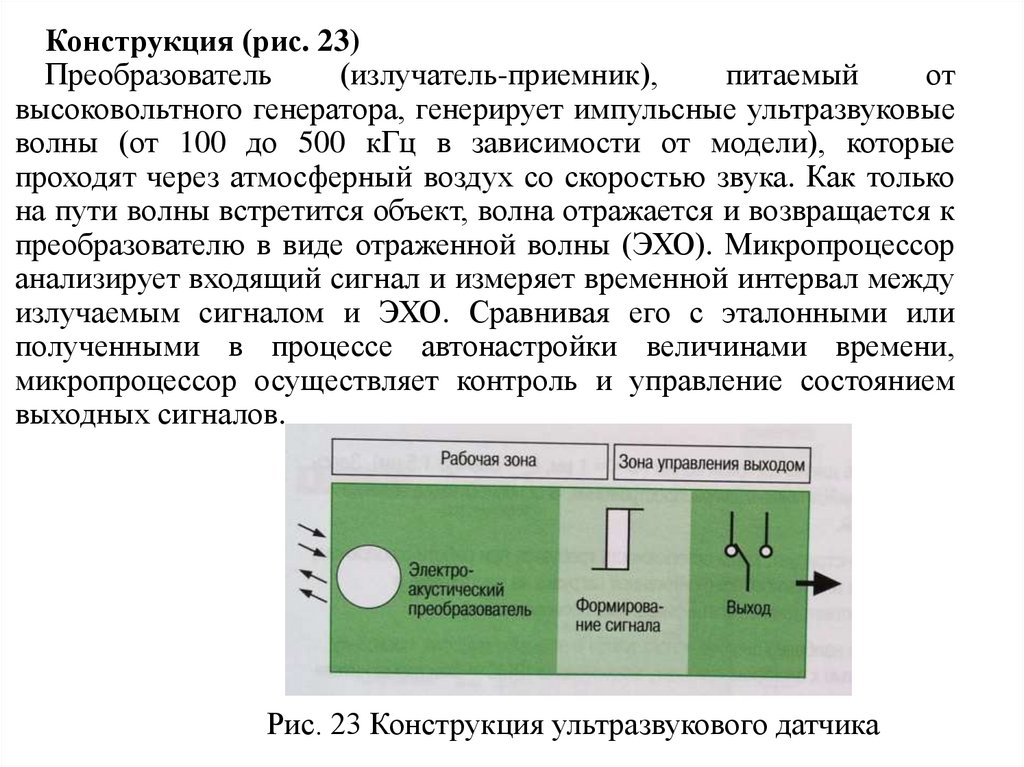
Конструкция (рис. 23)Преобразователь
(излучатель-приемник),
питаемый
от
высоковольтного генератора, генерирует импульсные ультразвуковые
волны (от 100 до 500 кГц в зависимости от модели), которые
проходят через атмосферный воздух со скоростью звука. Как только
на пути волны встретится объект, волна отражается и возвращается к
преобразователю в виде отраженной волны (ЭХО). Микропроцессор
анализирует входящий сигнал и измеряет временной интервал между
излучаемым сигналом и ЭХО. Сравнивая его с эталонными или
полученными в процессе автонастройки величинами времени,
микропроцессор осуществляет контроль и управление состоянием
выходных сигналов.
Рис. 23 Конструкция ультразвукового датчика
4.
Если известна скорость распространения звука, можно определитьрасстояние, используя следующую формулу:
T Vs
D
,
2
где:
D – расстояние между датчиком и объектом;
T – временной интервал между излучением волны и приемом
отраженной волны;
Vs – скорость звука (300м/с).
Выходом датчика может быть как дискретный сигнал, в качестве
которого выступает транзистор (PNP или NPN), который аналогичен
НО и НЗ контакту реле, так и аналоговый сигнал (ток или
напряжение), прямо- или обратно пропорциональный измеряемому
расстоянию до объекта.
5.
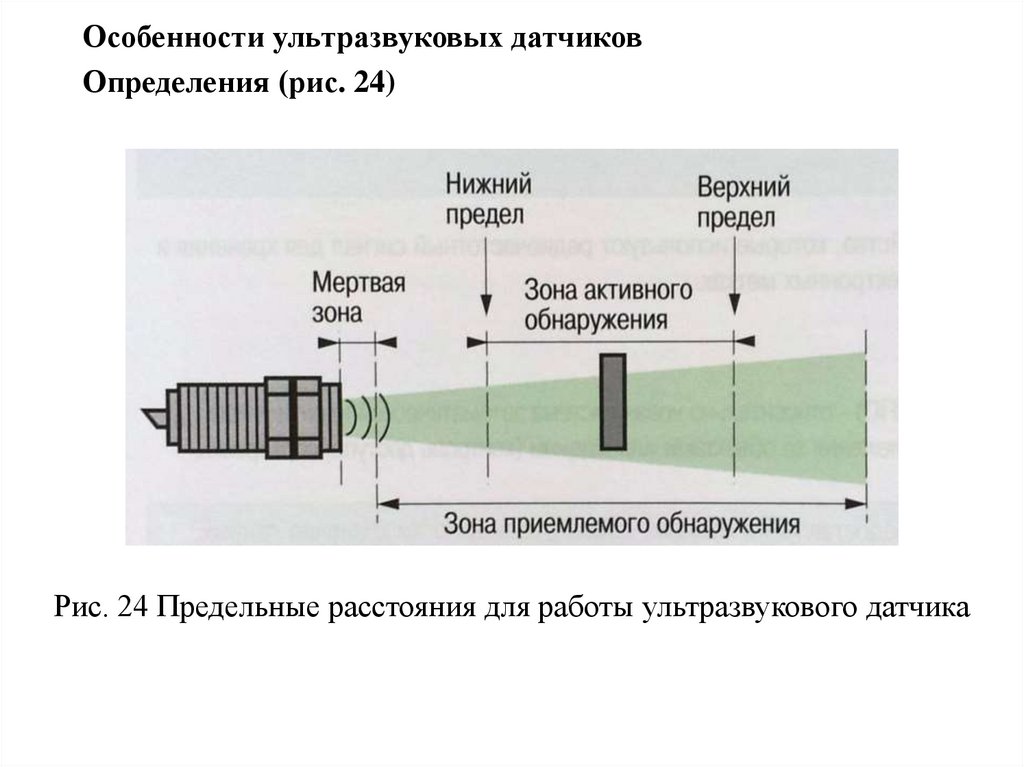
Особенности ультразвуковых датчиковОпределения (рис. 24)
Рис. 24 Предельные расстояния для работы ультразвукового датчика
6.
Мертвая зона: зона между чувствительной поверхностьюдатчика и минимальным расстоянием, на котором объект может
быть достоверно выявлен. В пределах мертвой зоны обнаружение
объекта невозможно.
Нахождение объектов в мертвой зоне датчика во время его
работы недопустимо, поскольку это может негативно повлиять на
стабильность работы.
Зона обнаружения: область, в пределах которой датчик
способен зафиксировать объект. В зависимости от модели зона
обнаружения может быть фиксированной или регулируемой, т.е.
настраиваться простым нажатием кнопки.
Факторы, влияющие на работу датчика: ультразвуковые
датчики широко применяются для обнаружения объектов,
имеющих плоскую поверхность, перпендикулярную оси
обнаружения.
Тем не менее существует ряд факторов, способных оказать
негативное воздействие на работу датчика:
7.
внезапные сильные потоки воздуха могут ускорить илинаоборот замедлить звуковую волну;
резкие температурные перепады в области обнаружения
датчика. Когда объект излучает большое количество тепла,
возникают различные температурные области, которые изменяют
скорость распространения волны, что ведет к неточности работы
датчика;
звукопоглощающие материалы, такие как хлопок, ткань и
резина. В этом случае рекомендуется использовать режим работы
«Отражение»;
угол между плоскостью поверхности объекта и осью
обнаружения датчика. В случаях, когда этот угол отличен от 90°,
отраженная волна отклоняется от оси датчика, что снижает
максимальную дистанцию обнаружения. Чем больше расстояние
между объектом и датчиком, тем сильнее проявляется этот эффект.
При отклонениях, превышающих 10°, обнаружение становится
невозможным;
форма обнаруживаемого объекта. Согласно предыдущему
пункту объекты, имеющие угловатую форму, трудно обнаружить.
8.
Режим работы (рис. 25)Режим «Рассеивание»: одиночный датчик излучает и
регистрирует звуковую волну после того, как она была отражена от
объекта. В этом случае функцию отражения выполняет
обнаруживаемый объект.
Режим «Отражение»: одиночный датчик излучает и
регистрирует звуковую волну после того, как она была отражена от
объекта. В этом случае в качестве объекта может выступать
плоский, жесткий элемент, например, часть механизма. Датчик
постоянно принимает отраженную звуковую волну. Объект
обнаруживается в тот момент, когда прием нарушен. Этот режим
особенно подходит для звукопоглощающих объектов и объектов,
имеющих угловатую форму.
Режим «Сквозной луч»: в этом случае система состоит из двух
элементов: излучатели и приемника, расположенных напротив
друг друга.
9.
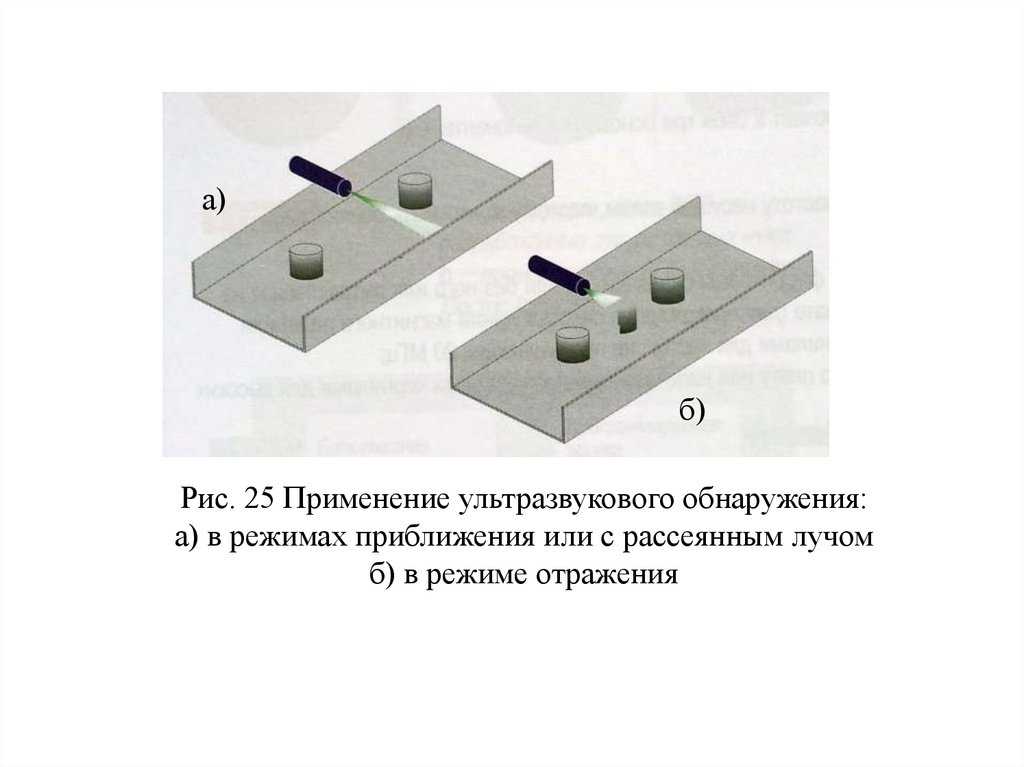
а)б)
Рис. 25 Применение ультразвукового обнаружения:
а) в режимах приближения или с рассеянным лучом
б) в режиме отражения
10.
Достоинства ультразвуковых датчиковотсутствует физический контакт датчика с объектом,
поэтому отсутствует износ и есть возможность обнаружения
хрупких или свежеокрашенных объектов;
объекты из любого вещества и любого цвета могут быть
обнаружены на одинаковом расстоянии без дополнительных
настроек и коррекций;
отсутствуют подвижные части внутри датчика, поэтому
срок службы датчика не зависит от количества рабочих циклов;
высокая стойкость к внешним воздействиям: вибро-, влаго, пыле- и ударостойкость;
функция обучения, которая реализуется с помощью кнопки
для задания минимального и максимального расстояния
обнаружения.