

 mechanics
mechanicsSimilar presentations:










Конструктивные схемы полноприводных трансмиссий
1.
презентация по теме: Конструктивные схемыполноприводных трансмиссий
Волков Игорь 2A2
2.
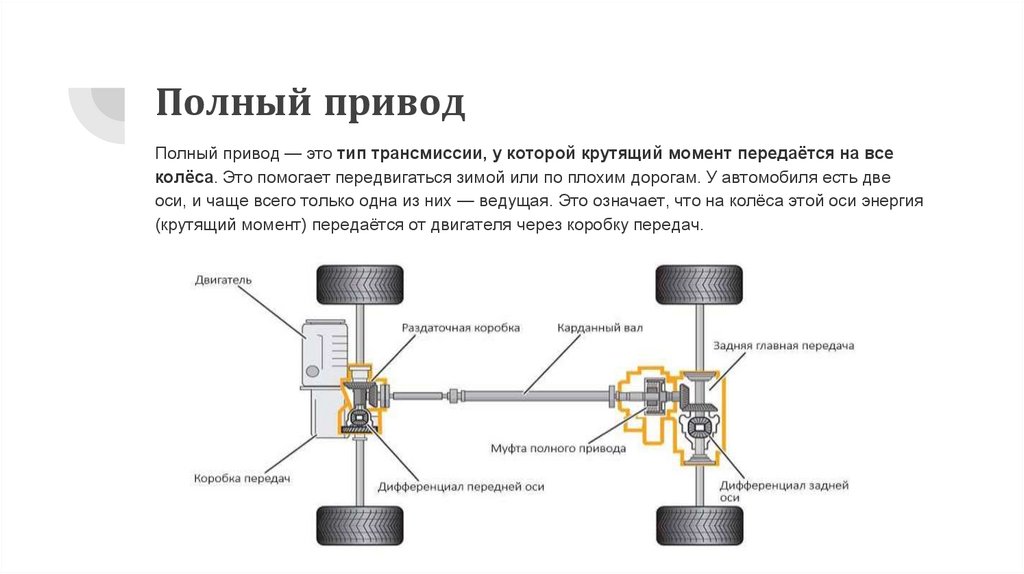
Полный приводПолный привод — это тип трансмиссии, у которой крутящий момент передаётся на все
колёса. Это помогает передвигаться зимой или по плохим дорогам. У автомобиля есть две
оси, и чаще всего только одна из них — ведущая. Это означает, что на колёса этой оси энергия
(крутящий момент) передаётся от двигателя через коробку передач.
3.
Компоновка с передним расположениемБольшая часть полноприводных автомобилей — переднемоторные, которые
двигателя
являются производными от переднемоторных задне и переднеприводных.
Подобная компоновка является самой целесообразной для грузовых
автомобилей повышенной проходимости, пикапов и SUV: она обеспечивает их
сцепление, не жертвуя ни перевозимым грузом, ни пассажирскими сиденьями.
4.
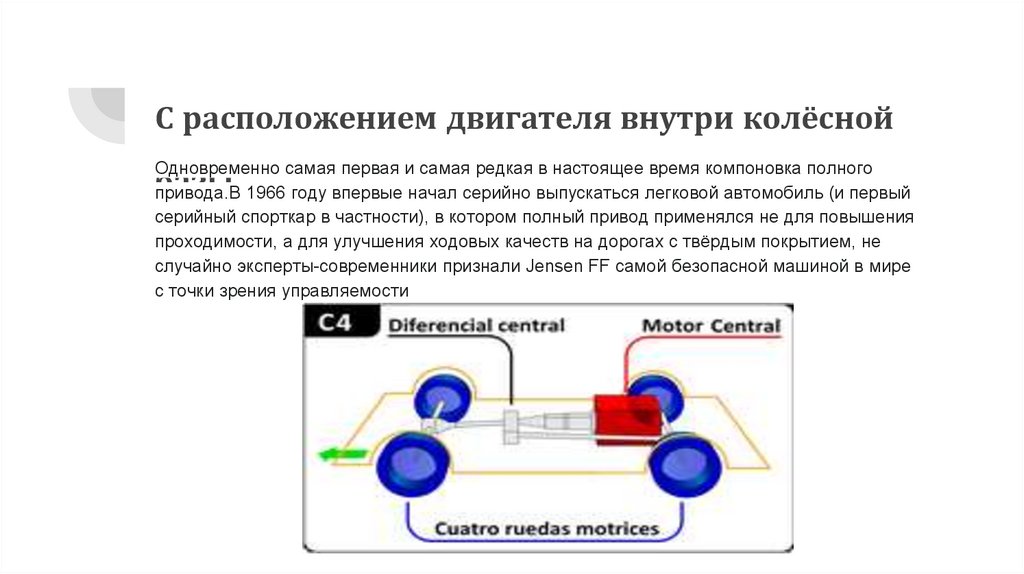
С расположением двигателя внутри колёснойОдновременно самая первая и самая редкая в настоящее время компоновка полного
привода.В 1966 году впервые начал серийно выпускаться легковой автомобиль (и первый
серийный спорткар в частности), в котором полный привод применялся не для повышения
проходимости, а для улучшения ходовых качеств на дорогах с твёрдым покрытием, не
случайно эксперты-современники признали Jensen FF самой безопасной машиной в мире
с точки зрения управляемости
базы
5.
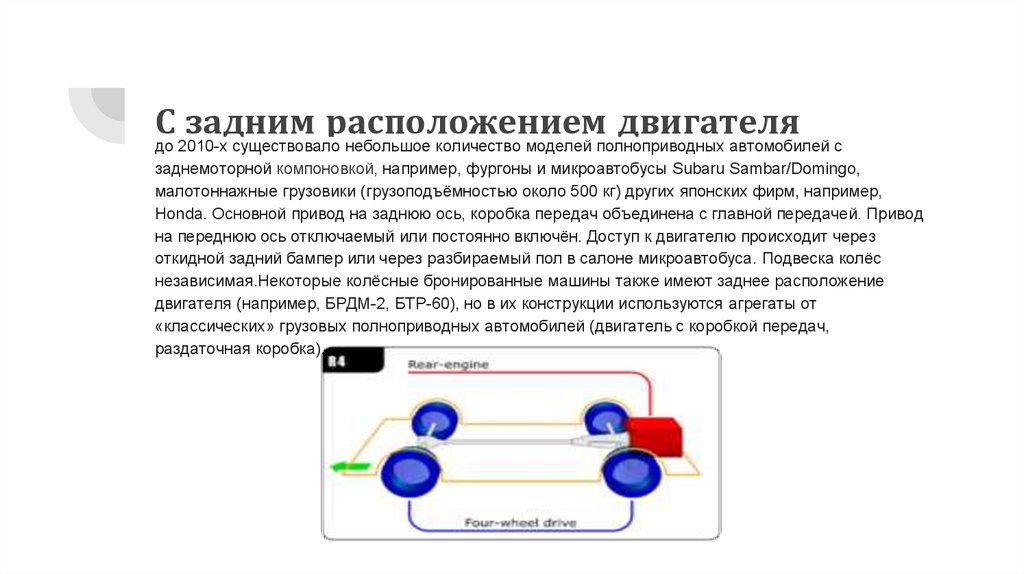
Сзадним расположением двигателя
до 2010-х существовало небольшое количество моделей полноприводных автомобилей с
заднемоторной компоновкой, например, фургоны и микроавтобусы Subaru Sambar/Domingo,
малотоннажные грузовики (грузоподъёмностью около 500 кг) других японских фирм, например,
Honda. Основной привод на заднюю ось, коробка передач объединена с главной передачей. Привод
на переднюю ось отключаемый или постоянно включён. Доступ к двигателю происходит через
откидной задний бампер или через разбираемый пол в салоне микроавтобуса. Подвеска колёс
независимая.Некоторые колёсные бронированные машины также имеют заднее расположение
двигателя (например, БРДМ-2, БТР-60), но в их конструкции используются агрегаты от
«классических» грузовых полноприводных автомобилей (двигатель с коробкой передач,
раздаточная коробка).
6.
Конструктивная спецификаМежосевой дифференциал в данных системах отсутствует. Главная передача постоянно
ведущей оси здесь соединена с выходным/вторичным валом коробки передач таким же
образом, как это было бы сделано на автомобилях с одной ведущей осью
(моноприводных), а главная передача подключаемой оси здесь соединена с выходным
валом коробки передач через узел отбора мощности, приводной вал и механическую
муфту того или иного типа, причём последовательность расположения этих трёх
элементов полного привода может быть различной.
7.
Схемы полного приводаПодключаемый полный привод
Самая простая и в то же время самая надёжная схема полного привода: при нормальной
эксплуатации крутящий момент передаётся только на одну ось (переднюю или заднюю, в
зависимости от модели и конструкции), а при необходимости подключается вторая ось
(также переднюю или заднюю, в зависимости от модели и конструкции) — с помощью
раздаточной коробки. При подключении о́си жёстко связываются между собой и
вращаются с одинаковой скоростью, что создаёт некоторые ограничения: полный привод
можно использовать только на покрытиях, допускающих проскальзывание колёс (грязь,
песок, снег, лёд и т. п.). Какие колёса будут пробуксовывать — передние или задние — это
зависит от нагрузки на ось в данный момент.
8.
Постоянный полный приводДанная система полного привода предполагает постоянное подключение всех
осей автомобиля к раздаче крутящего момента от двигателя. Главные
передачи осей здесь получают крутящий момент от коробки передач через
специфический элемент любой подобной трансмиссии — межосевой
дифференциал. В случае двухосного автомобиля межосевой дифференциал
один, в случае трёхосного — два, в случае четырёхосного — три, и т. д.,
причём, ветвление потоков через дифференциалы всегда происходит
наподобие двоичного дерева. Независимо от общего числа ведущих осей
система способна работать в чисто механической реализации без какой-либо
управляющей электроники.