













 mechanics
mechanicsSimilar presentations:




")





Трение в механизмах. Виды трения
1.
ЛЕКЦИЯТрение в механизмах. Виды трения
Трение скольжения в поступательных парах
Трение скольжения во вращательных парах
Трение качения
Особенности учета сил трения при силовом
расчете рычажных механизмов
Коэффициент полезного действия (к.п.д.) машины
2.
ТРЕНИЕ В МЕХАНИЗМАХ. ВИДЫ ТРЕНИЯСпособность контактирующих поверхностей звеньев
сопротивляться их относительному движению называется
внешним трением.
Трение
обусловлено
неидеальным
состоянием
контактирующих поверхностей (микронеровности, загрязнения,
окисные пленки и т.п.) и силами межмолекулярного сцепления.
Трение в кинематических парах характеризуется силами трения
и моментами сил трения.
Силой трения называется касательная составляющая
реакции в КП (составляющая, направленная по касательной к
контактирующим поверхностям), которая всегда направлена
против вектора скорости относительного движения звеньев.
3.
ВИДЫ ТРЕНИЯ:трение покоя проявляется в момент, когда два тела
находящиеся в состоянии относительного покоя начинают
относительное
движение
(касательную
составляющую
возникающую
в
зоне
контакта
до
возникновения
относительного движения, в условиях когда она меньше силы
трения покоя, будем называть силой сцепления; максимальная
величина силы сцепления равна силе трения покоя);
• трение скольжения появляется в КП при наличии
относительного движения звеньев; для большинства
материалов трение скольжения меньше трения покоя;
• трение качения появляется в высших КП при наличии
относительного вращательного движения звеньев вокруг оси
или точки контакта;
• трение верчения возникает при взаимодействии торцевых
поверхностей звеньев вращательных КП (подпятники).
4.
По наличию и виду применяемых смазочныхматериалов различают:
5.
Трение скольжения в поступательных парахСила трения на поверхности соприкосновения двух звеньев
направлена в сторону, противоположную скорости относительного движения и приближённо может быть определена по
формуле Кулона:
Fтр = f · Fn ,
где Fn – сила реакции, нормальная к поверхности контакта;
f – коэффициент трения скольжения (величина, постоянная в
определённом диапазоне скоростей и удельных давлений).
Коэффициент трения зависит от многих факторов (чистоты
поверхности, наличия и качества смазки, материала тел и др.) и
определяется экспериментально.
6.
Сила трения покоя (сила сцепления), т.е. сила, которую надопреодолеть, чтобы тело привести в движение обычно больше силы
трения скольжения, поэтому различают коэффициент сцепления fo
и коэффициент трения скольжения f . Сила трения возникает как
результат действия внешних сил F, поэтому она является реактивной силой, в результате действия которой суммарная реакция F∑
отклоняется на угол ρ от нормали к трущимся поверхностям (а).
а
б
7.
При этом:Угол ρ называется углом трения скольжения.
Если построить конус с углом при вершине 2ρ (б), то
получим конус трения. Движение возможно при
или при
, то есть при
, причем,
если
, то движение происходит с (V = const).
В общем случае движение возможно, если сила внешнего
воздействия F находится за пределами конуса трения.
Мощность, затрачиваемая на трение скольжения равна:
,
где знак зависит от направления скоростей.
8.
Трение скольжения во вращательных парахВращательные кинематические пары, образуемые цапфами
валов и их опорами, широко распространены в машиностроении.
Цапфами называются части валов и осей, посредством которых
они опираются на подшипники. Трение цапф в подшипниках
удобно оценивать величиной момента сил трения скольжения
относительно оси вращения:
M тр = Fтр ·r = Fn · f · r = F∑ · rтр ,
где F∑ – полная реакция;
– радиус круга трения, равный
= r · sin ρ ≈ r · tgρ ≈ r · f
Мощность, затрачиваемая на трение, равна:
Pтр = Mтр ·ωотн= Mтр ·(ω1 ± ω2)
9.
Трение каченияВ случаях идеально твёрдых тел, одно из которых катится
по поверхности другого, соприкосновение их происходит по
линии или в точке и сопротивление качению отсутствует, так как
линии действия сил Fn совпадают (а) и сумма моментов относительно точки А равна ∑MA = F · h . В действительности соприкосновение происходит не по линии, а по поверхности
вследствие деформаций (б)
10.
Сумма моментов (∑MA) равна:∑ M A = F ·h – Fn ∙ k .
При Vотн = const и Ft = F получим F ·h – Fn ·k = 0, т.е.
– коэффициент трения качения, измеряемый в
единицах длины.
Часто используется величина, называемая приведённым коэффи-
циентом трения качения:
. При этом сила трения качения
по аналогии с силой трения скольжения может быть представлена в виде:
11.
12.
Особенности учета сил трения при силовом расчетерычажных механизмов
Для учёта сил трения в кинематических парах рычажных
механизмов при определении Fур или Mур используется метод
приведения сил трения, позволяющий определять уточнённые
значения Fур* (Мур*) без повторного силового расчёта с учётом
трения по формуле:
где
– уравновешивающий момент, вычисленный без учета
трения;
– момент трения, приведенный к вращающемуся с
угловой скоростью ωв входному звену, и равный:
13.
Здесь– суммарная мощность сил трения в
кинематических парах.
Для определения реакций в кинематических парах с
учётом трения обычно используется метод
последовательных приближений, когда по найденным
без учёта трения реакциям определяются силы и
моменты трения в кинематических парах.
Затем эти силы прикладываются как внешние и
производится перерасчёт реакций в установленном
порядке. Обычно достаточно одного перерасчёта
(итерации).
14.
Коэффициент полезного действия (кпд) машиныЭнергия, потребляемая машиной, расходуется на преодоление полезных и вредных сопротивлений. Полезные – это
сопротивления, для преодоления которых машина предназначается. Вредные – это сопротивления, преодоление которых не
даёт производственного эффекта.
Механическим КПД (η) называется отношение полезной
работы
или мощности
к затраченной
(
).
Потери механической энергии в разного рода устройствах
состоят главным образом из потерь на трение:
15.
При холостом ходе машины η = 0 , но могут бытьслучаи когда η < 0 , что означает невозможность
совершать движение из-за явления, называемого
самоторможением.
Например, червячный редуктор не может
совершать вращение со стороны червячного колеса.
Рассмотрим машину как совокупность n
элементов, соединённых различным образом
между собой.
16.
1. Элементы соединены последовательно и кпд (из них известны:
) каждого
Тогда:
Поэтому следует стремиться к созданию простых
конструкций с малым числом элементов
17.
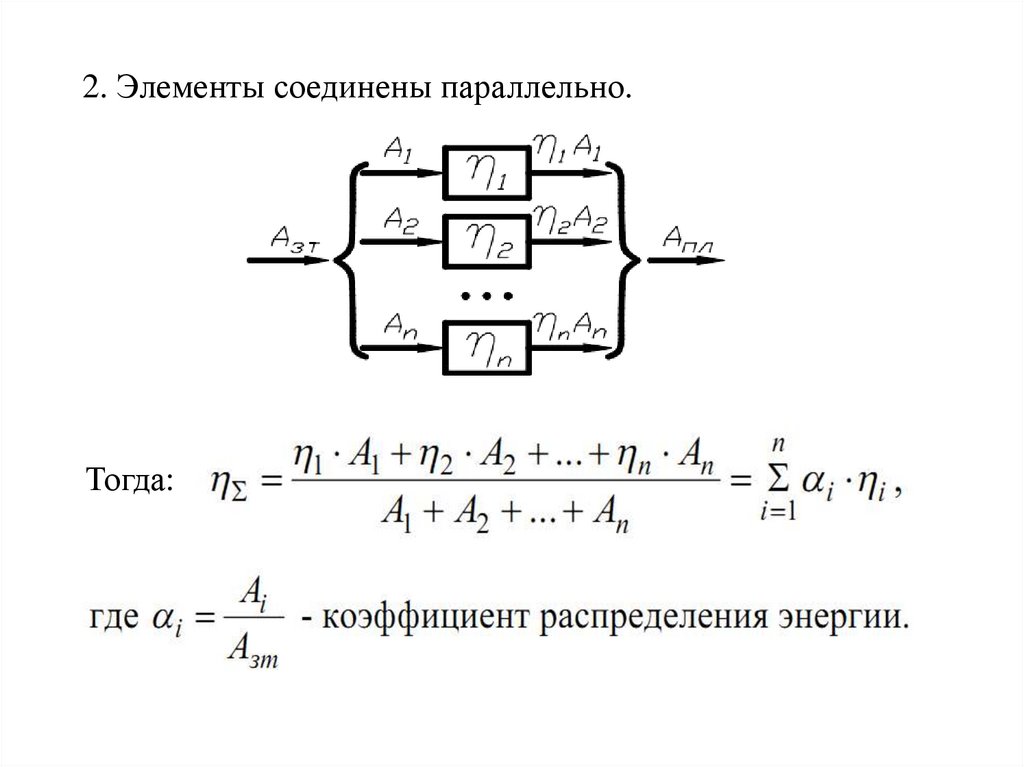
2. Элементы соединены параллельно.Тогда:
18.
При η1 = η2 = ... = ηn получим, следовательно низкое
качество отдельных элементов меньше влияет на общий кпд
машины, чем при последовательном соединении.
Сложные механизмы могут образовывать разветвлённую
систему, состоящую из последовательного и параллельного
соединённых более простых механизмов, где кпд определяется согласно указанным выше правилам.
Так как любой механизм представляет собой кинематическую цепь с последовательно и параллельно соединёнными
в кинематических парах звеньями, то общий кпд механизма
вычисляется аналогично при известных кпд кинематических
пар.
19.
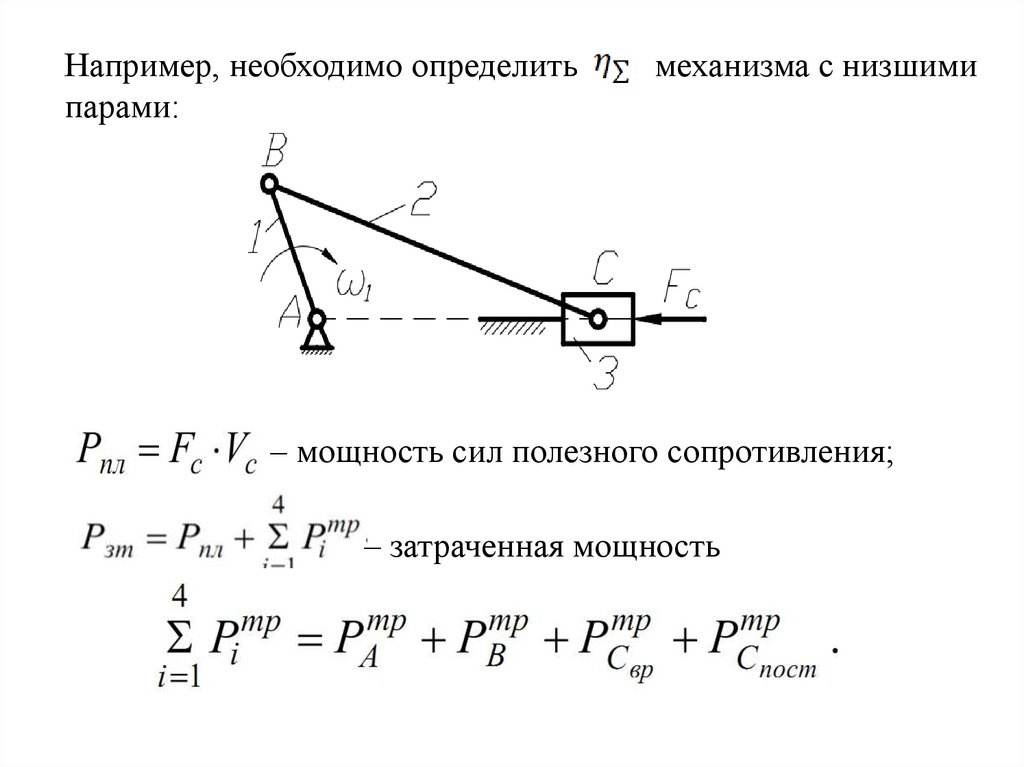
Например, необходимо определитьпарами:
механизма с низшими
– мощность сил полезного сопротивления;
– затраченная мощность
20.
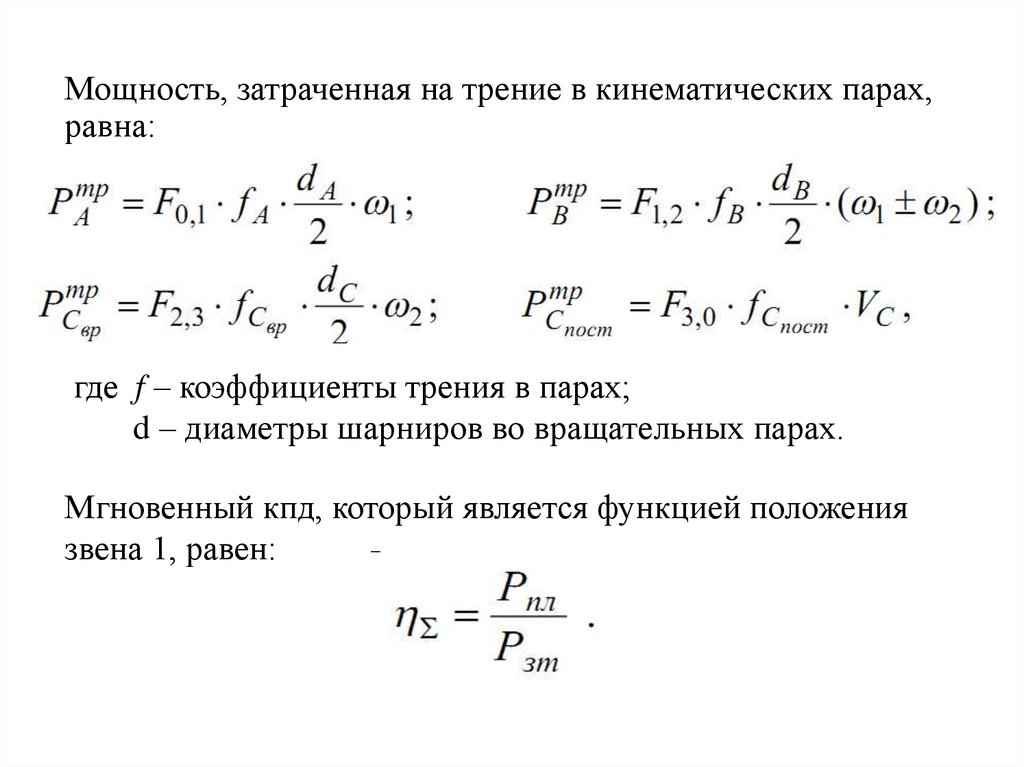
Мощность, затраченная на трение в кинематических парах,равна:
где f – коэффициенты трения в парах;
d – диаметры шарниров во вращательных парах.
Мгновенный кпд, который является функцией положения
звена 1, равен: