







 electronics
electronicsSimilar presentations:










Автоматизированный моделирующий динамический комплекс «Кама-М»
1.
несекретноАвтоматизированный моделирующий динамический комплекс
«Кама–М»
Научный сотрудник НИИ кораблестроения и вооружения ВМФ
ВУНЦ ВМФ «Военно-морская академия»
капитан 3 ранга ПАНТЕЛЕЕВ Артем Владимирович
2.
Место дислокации комплекса1
3. Назначение АМДК «Кама–М»
АВТОМАТИЗИРОВАННЫЙ МОДЕЛИРУЮЩИЙ ДИНАМИЧЕСКИЙ КОМПЛЕКС «Кама–М»ПРЕДНАЗНАЧЕН:
для исследования выполнения требований ТТЗ по обеспечению радиоэлектронной защиты СУ КР
ВМФ методом полунатурного моделирования стрельб комплексов ударного ракетного оружия ВМФ
по морским целям в условиях сложной фоноцелевой обстановки и радиоэлектронного подавления
МОДЕРНИЗИРОВАН:
АМДК «Кама» модернизирован в рамках ОКР «Кама-М» в 2014 г.
Головной исполнитель ОКР – ОАО «НПЦ «Электронное приборостроение»,
генеральный директор - генеральный конструктор МЕРДАНОВ Мердан Казимагомедович
2
4.
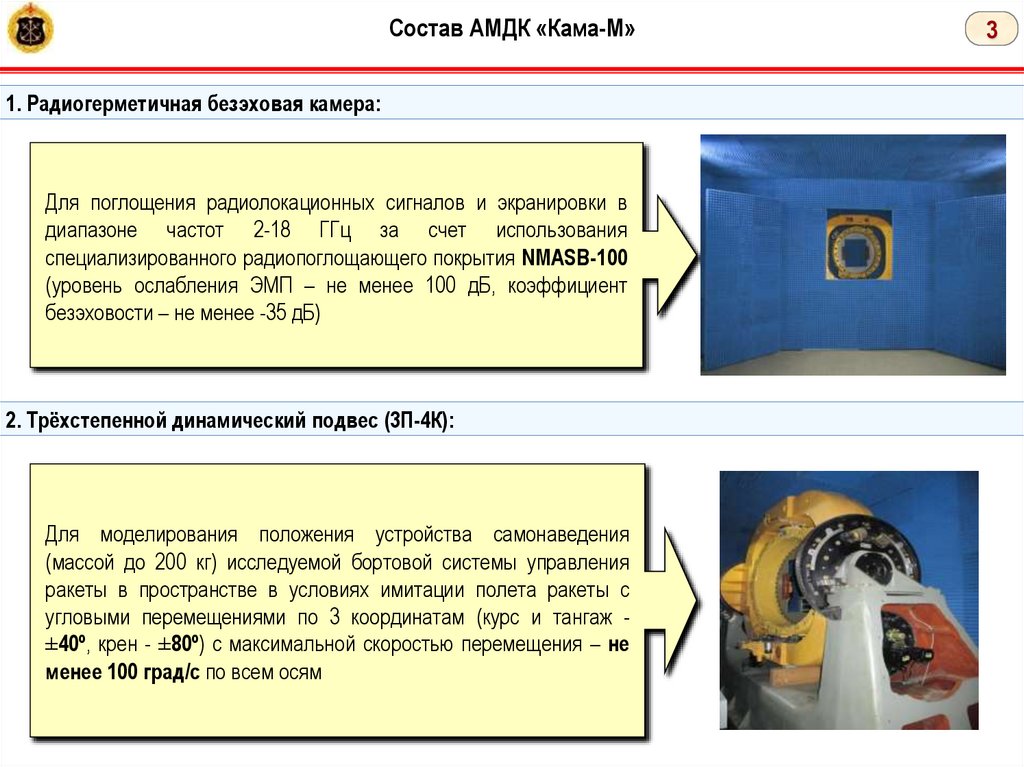
Состав АМДК «Кама-М»1. Радиогерметичная безэховая камера:
Для поглощения радиолокационных сигналов и экранировки в
диапазоне частот 2-18 ГГц за счет использования
специализированного радиопоглощающего покрытия NMASB-100
(уровень ослабления ЭМП – не менее 100 дБ, коэффициент
безэховости – не менее -35 дБ)
2. Трёхстепенной динамический подвес (3П-4К):
Для моделирования положения устройства самонаведения
(массой до 200 кг) исследуемой бортовой системы управления
ракеты в пространстве в условиях имитации полета ракеты с
угловыми перемещениями по 3 координатам (курс и тангаж ±40º, крен - ±80º) с максимальной скоростью перемещения – не
менее 100 град/с по всем осям
3
5.
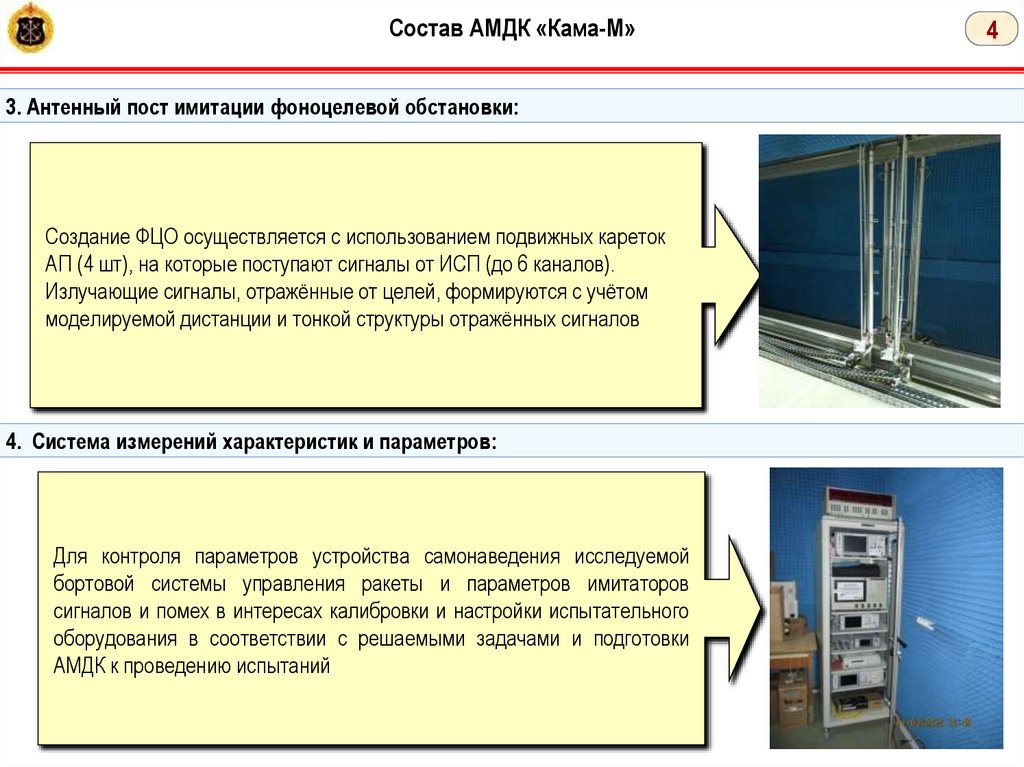
Состав АМДК «Кама-М»3. Антенный пост имитации фоноцелевой обстановки:
Создание ФЦО осуществляется с использованием подвижных кареток
АП (4 шт), на которые поступают сигналы от ИСП (до 6 каналов).
Излучающие сигналы, отражённые от целей, формируются с учётом
моделируемой дистанции и тонкой структуры отражённых сигналов
4. Система измерений характеристик и параметров:
Для контроля параметров устройства самонаведения исследуемой
бортовой системы управления ракеты и параметров имитаторов
сигналов и помех в интересах калибровки и настройки испытательного
оборудования в соответствии с решаемыми задачами и подготовки
АМДК к проведению испытаний
4
6.
Состав АМДК «Кама-М»5. Имитаторы сигналов и помех фоноцелевой обстановки:
формирование отражённых сигналов от целей и пассивных
помех на основе зондирующих импульсов, поступающих от
УСН по эфиру;
формирование исследуемых помеховых воздействий на
цифровом уровне, для обеспечения создания в ходе
моделирования как известных, так и перспективных видов
сигналов;
обеспечение
многоканальности
для
независимого
формирования сигналов целей, пассивных помех и активных
помех из разнесённых точек пространства (не менее 6
каналов);
создание помеховой обстановки осуществляется в
соответствии с вариантами РЭП и перечня моделируемых
сигналов.
5
7.
Состав АМДК «Кама-М»5. Система управления и документирования (СУД) АМДК:
АРМ АМДК - автоматизированное рабочее место предназначено для планирования исходной
тактической обстановки и обеспечения моделирования целевой обстановки путем управления
подвижными каретками антенного поста.
АРМ БАСУ - автоматизированное рабочее место предназначено для моделирования динамики движения
носителя испытываемого УСН.
АРМ ФЦО - автоматизированное рабочее место предназначено для планирования и управления фоноцелевой и помеховой обстановкой в используемых диапазонах.
АРМ СО - автоматизированное рабочее место предназначено для отображения хода испытательного
эксперимента на экране в реальном масштабе времени при полунатурном моделировании.
6
8. Функциональная схема АМДК «Кама-М»
Радиогерметичная безэховая камераЛВС3
Пост
КИА
7
Экран
АП
АРМ
СИ
Антенна
измерительная
ИП
АРМ
СО
ЛВС1
АРМ
ФЦО
ЛВС4
ГСН
ЛВС5
АРМ
БАСУ
ИС
ТДП
СУ
ТДП
ЛВС2
СУ
АП
ЛВС1
АРМ
АМДК
9. Комплекс математических моделей на АМДК «Кама–М»
НАЗНАЧЕНИЕ:для исследования помехозащищенности СУ КР ВМФ методом математического моделирования алгоритмов полета КР и алгоритмов работы
ГСН в условиях сложной ФЦО и РЭП и дальнейшей визуализации результатов моделирования.
СОСТАВ: прикладная программа математического моделирования; прикладная программа визуализации результатов моделирования
ВОЗМОЖНОСТИ ПРИКЛАДНОЙ ПРОГРАММЫ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ:
• создание и редактирование перечня кораблей условного противника, с указанием параметров возможных помех, выставляемых с данных
кораблей;
• создание и редактирование перечня ордеров (целей), по которым производится запуск КР;
• редактирование параметров моделируемых КР;
• редактирование параметров моделируемых средств РЭП;
• пошаговое моделирование алгоритмов полета КР, алгоритмов работы ГСН и алгоритмов работы средств РЭП;
• сохранение результатов моделирования для последующей визуализации.
ВОЗМОЖНОСТИ ПРИКЛАДНОЙ ПРОГРАММЫ ВИЗУАЛИЗАЦИИ РЕЗУЛЬТАТОВ МОДЕЛИРОВАНИЯ:
• просмотр траектории движения ПКР и целей в виде трехмерного анимационного видеофильма;
• точки просмотра - со стороны ПКР, со стороны целей;
• изменение положения точек просмотра;
• возможность паузы и просмотра с различной скоростью воспроизведения (задается оператором).
Результаты моделирования на КММ используются при разработке исходных данных для формирования
сценария фоноцелевой и помеховой обстановки при полунатурном моделировании на АМДК «Кама-М»
8
10. Методология проведения испытаний устройств самонаведения методом полунатурного моделирования на АМДК «Кама-М»
Установка УСН КР на трехстепенном подвесе и стыковка сАМДК «Кама-М»
Задание фоноцелевой обстановки
Задание вариантов помеховой
обстановки
Моделирование угловых перемещений испытуемой УСН на
подвесе, соответствующее модели полета КР
Определение величины промаха относительно точки
прицеливания при стрельбе КР по выбранной цели
Документирование результатов испытаний
9
11. Методология оценки помехозащищенности систем управления крылатых ракет
Натурные испытания(исследования воздействия пассивных помех)
Полунатурные испытания на АМДК
(исследования совместного воздействия активных и пассивных помех)
Статические испытания
Динамические испытания
Математическое моделирование
отдельных устройств УСН
Комплексная математическая модель
функционирования УСН в условиях РЭП
Расчет показателей помехозащищенности:
- вероятность попадания ракеты в главную
цель ордера - PЯ ;
- вероятность попадания ракеты в любой
корабль ордера - QРЭП
10
12.
Доклад оконченНаучный сотрудник НИИ кораблестроения и вооружения ВМФ
ВУНЦ ВМФ «Военно-морская академия»
капитан 3 ранга ПАНТЕЛЕЕВ Артем Владимирович