






 electronics
electronicsSimilar presentations:


. Радіоприймальні пристрої ЗРЛ")
")


")
")


Дослідження слідкуючих систем автоматичного керування БФ РЛС І РЛС
1.
ХАРКІВСЬКИЙ НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТІМЕНІ ІВАНА КОЖЕДУБА
навчальна дисципліна
ТЕОРІЯ ПОБУДОВИ ТА АНАЛІЗ ТИПОВИХ СИСТЕМ КЕРУВАННЯ
БАГАТОФУНКЦІОНАЛЬНИХ РЛС
Змістовий модуль 3. Дискримінатори, корегуючи та виконавчі пристрої
систем автоматичного керування у пристроях багатофункціональних РЛС
Заняття 3 (Гр. зан. 13). Дослідження слідкуючих
систем автоматичного керування БФ РЛС І РЛС
1
ЦУ за часом затримки
2.
ВступТема: ДОСЛІДЖЕННЯ СЛІДКУЮЧИХ СИСТЕМ
АВТОМАТИЧНОГО КЕРУВАННЯ БФ РЛС І РЛС ЦУ ЗА
ЧАСОМ ЗАТРИМКИ
1. Динамічні
характеристики
систем
структурних
елементів САК за часом затримки сигналів в РЛС.
2. Дослідження
динамічних
характеристик
систем
автоматичного
САК
за
часом
затримки
з
І-регулятором.
3. Дослідження
динамічних
характеристик
систем
автоматичного
САК
за
часом
затримки
з
ПІ-регулятором й ПІD-регулятором
Література:
1. Радіолокаційні засоби та системи керування зенітного
ракетного озброєння : підручник / за заг. ред. І. І. Сачука. –
Х. : ХНУПС, 2021. С. 150-170.
2
3.
1. Динамічні характеристики систем структурнихелементів САК за часом затримки сигналів в РЛС
Слідкуючий вимірювач часу затримки
uc ( t , t з )
tз
Дискримінатор
часовий
t̂ з
Об’єкт
керування
tˆз
uCП ( )
t з tˆз 0
uоп ( t , tˆз )
Виконавчий U кер
пристрій
(СЗЧЗ)
t r0
Керуючий
пристрій
Uкер tˆз
AC
Нав.
rЦУ ( tˆз )
3
4.
1. Динамічні характеристики систем структурнихелементів САК за часом затримки сигналів в РЛС
4
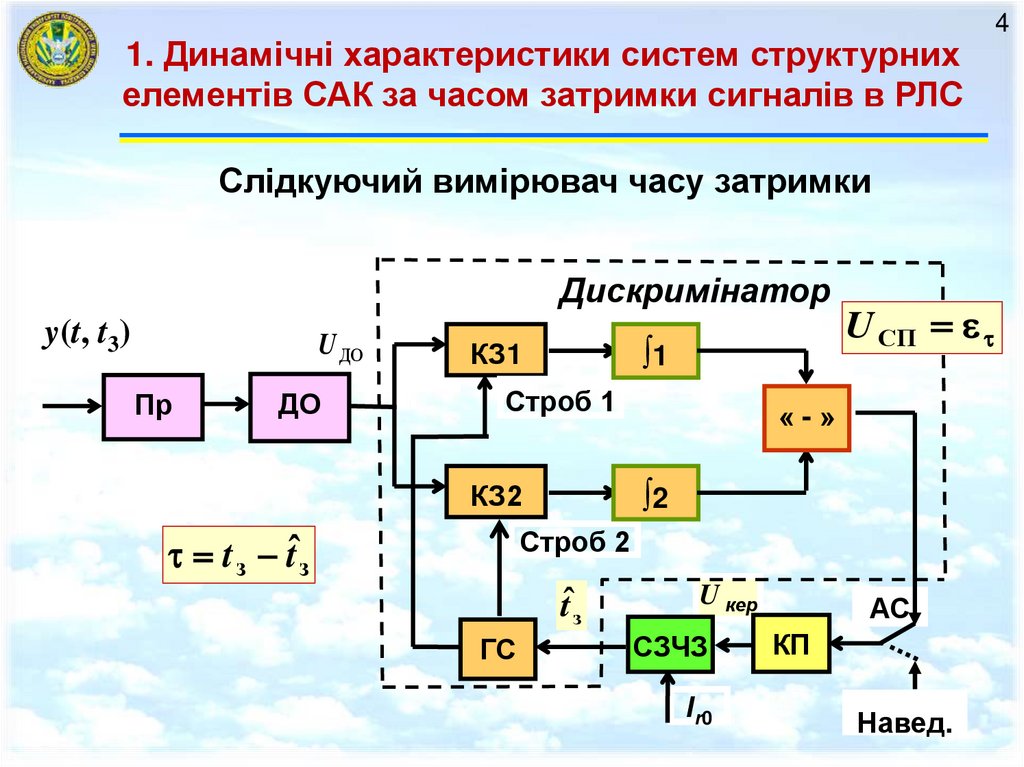
Слідкуючий вимірювач часу затримки
Дискримінатор
y(t, t3)
U ДО
Пр
ДО
∫1
КЗ1
Строб 1
U СП
«-»
∫2
КЗ2
Строб 2
t з t̂ з
t̂ з
ГС
U кер
СЗЧЗ
Іr0
АС
КП
Навед.
5.
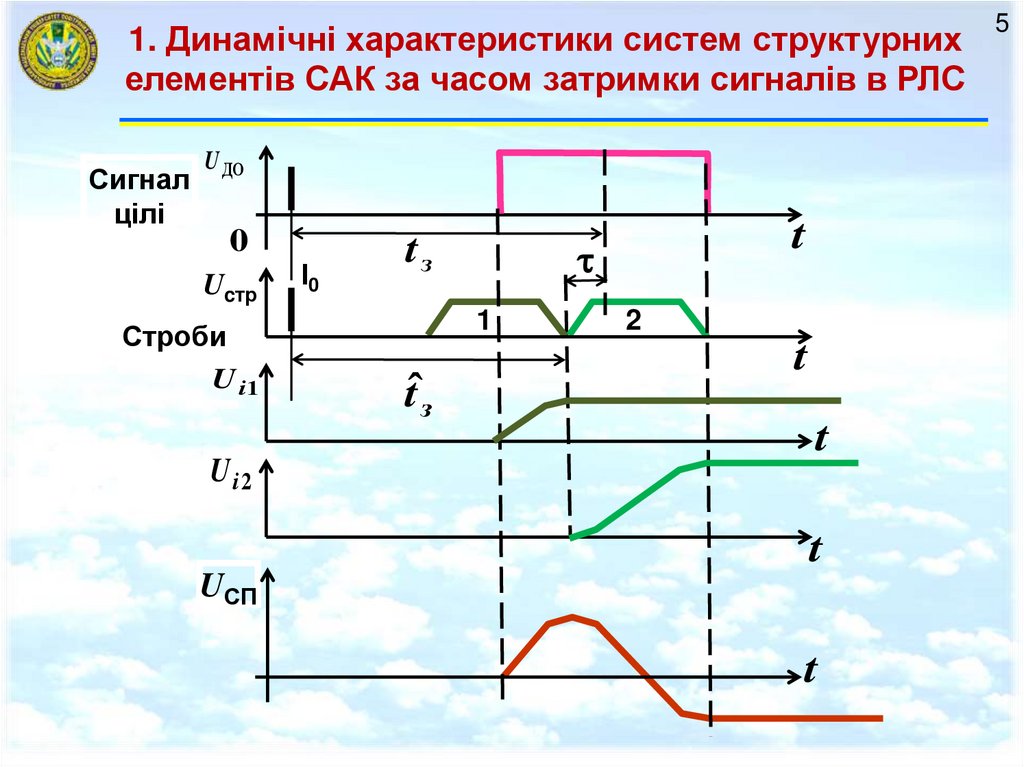
1. Динамічні характеристики систем структурнихелементів САК за часом затримки сигналів в РЛС
Сигнал
цілі
U ДО
0
Ucтр
Строби
U і1
Uі2
І0
t
tз
1
2
t
t̂ з
t
t
UСП
t
5
6.
1. Динамічні характеристики систем структурнихелементів САК за часом затримки сигналів в РЛС
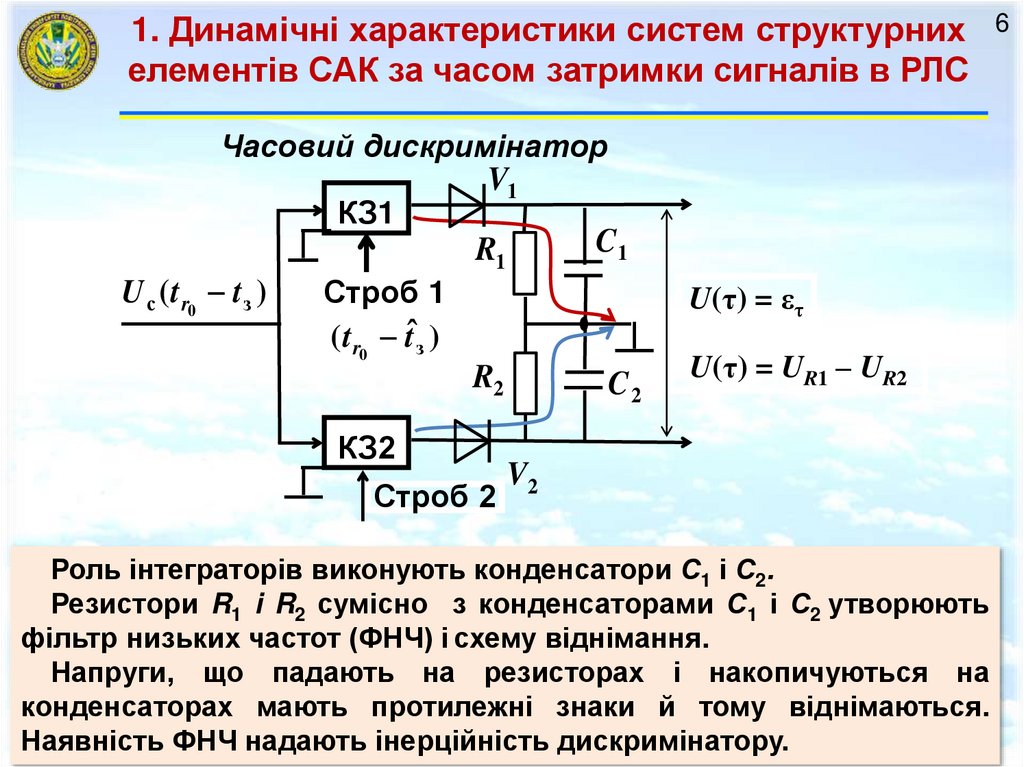
Часовий дискримінатор
КЗ1
U с ( t r0 t з )
V1
C1
R1
Строб 1
( t r0 tˆз )
U(τ) = ετ
R2
КЗ2
Строб 2
C2
U(τ) = UR1 – UR2
V2
Роль інтеграторів виконують конденсатори С1 і С2.
Резистори R1 i R2 сумісно з конденсаторами С1 і С2 утворюють
фільтр низьких частот (ФНЧ) і схему віднімання.
Напруги, що падають на резисторах і накопичуються на
конденсаторах мають протилежні знаки й тому віднімаються.
Наявність ФНЧ надають інерційність дискримінатору.
6
7.
1. Динамічні характеристики систем структурнихелементів САК за часом затримки сигналів в РЛС
7
Динамічні характеристики часового дискримінатора
як інерційної ланки
t з ( р)
tˆз ( р)
( р )
Sτ(p)
( р)
( р ) S ( p ) ( р )
K
S ( p)
1 T p
T 0,01 R1C1 1кОм 10мкФ 10 310 5 10 2 с
Модель часового
дискримінатора
t з ( р)
tˆз ( р)
s p
( р )
( р)
8.
1. Динамічні характеристики систем структурнихелементів САК за часом затримки сигналів в РЛС
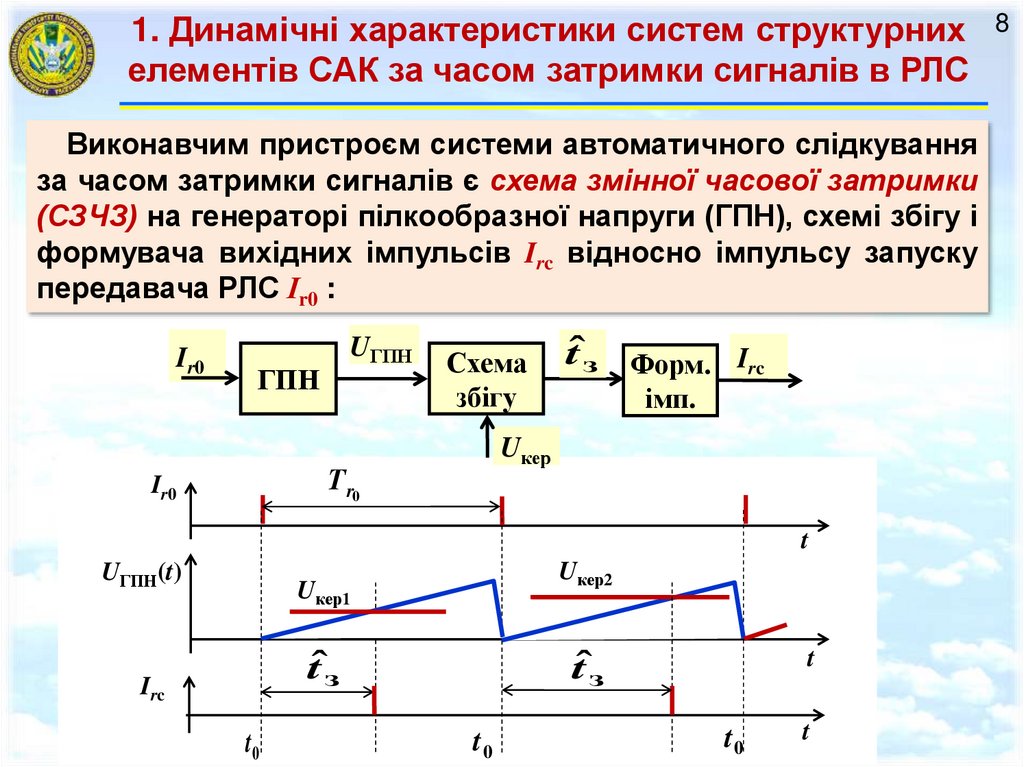
Виконавчим пристроєм системи автоматичного слідкування
за часом затримки сигналів є схема змінної часової затримки
(СЗЧЗ) на генераторі пілкообразної напруги (ГПН), схемі збігу і
формувача вихідних імпульсів Irc відносно імпульсу запуску
передавача РЛС Іr0 :
Ir0
UГПН
ГПН
Схема
збігу
Форм. Irc
імп.
Uкер
Т r0
Ir0
t̂ з
t
UГПН(t)
Uкер2
Uкер1
t̂ з
Irc
t0
t
t̂ з
t0
t0
t
8
9.
1. Динамічні характеристики систем структурнихелементів САК за часом затримки сигналів в РЛС
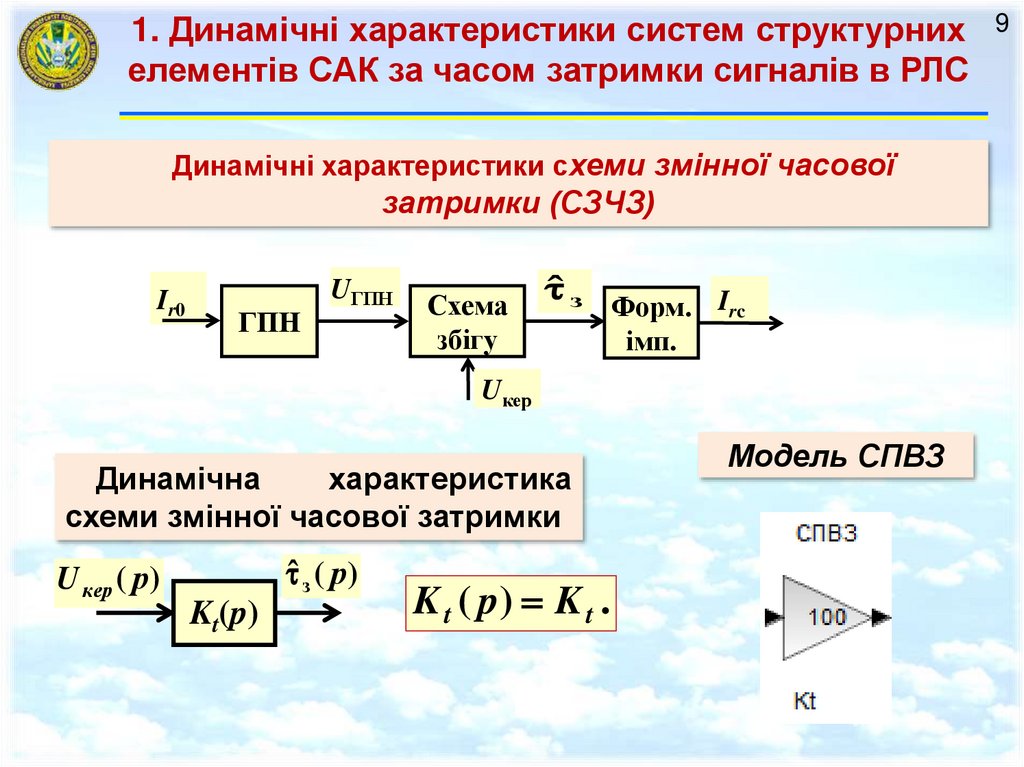
Динамічні характеристики схеми змінної часової
затримки (СЗЧЗ)
Ir0
ГПН
UГПН
Схема
збігу
̂ з
Форм. Irc
імп.
Uкер
Динамічна
характеристика
схеми змінної часової затримки
U кер ( р)
ˆ з ( р)
Kt(p)
K t ( p) K t .
Модель СПВЗ
9
10.
1. Динамічні характеристики систем структурних 10елементів САК за часом затримки сигналів в РЛС
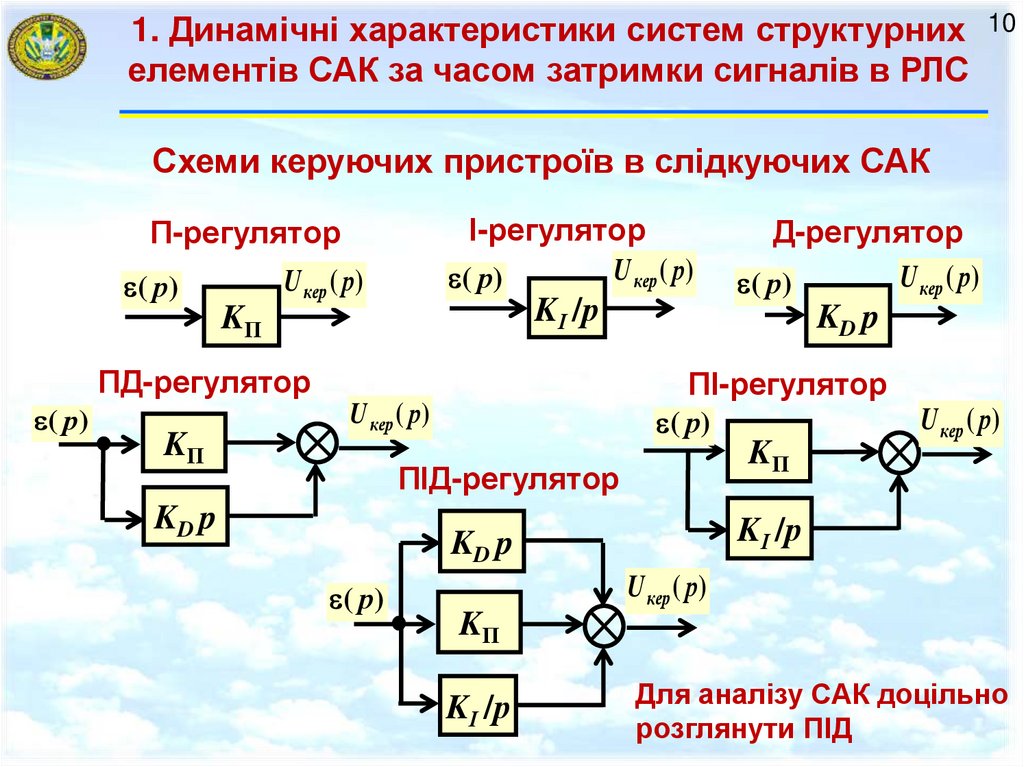
Схеми керуючих пристроїв в слідкуючих САК
І-регулятор
U кер ( р)
( р )
П-регулятор
U кер ( р)
( р )
KІ /р
KП
ПД-регулятор
( р )
KП
KD p
ПІ-регулятор
( р )
U кер ( р)
KП
KІ /р
ПІД-регулятор
KD p
KD p
( р )
Д-регулятор
U кер ( р)
( р )
U кер ( р)
U кер ( р)
KП
KІ /р
Для аналізу САК доцільно
розглянути ПІД
11.
1. Динамічні характеристики систем структурних 11елементів САК за часом затримки сигналів в РЛС
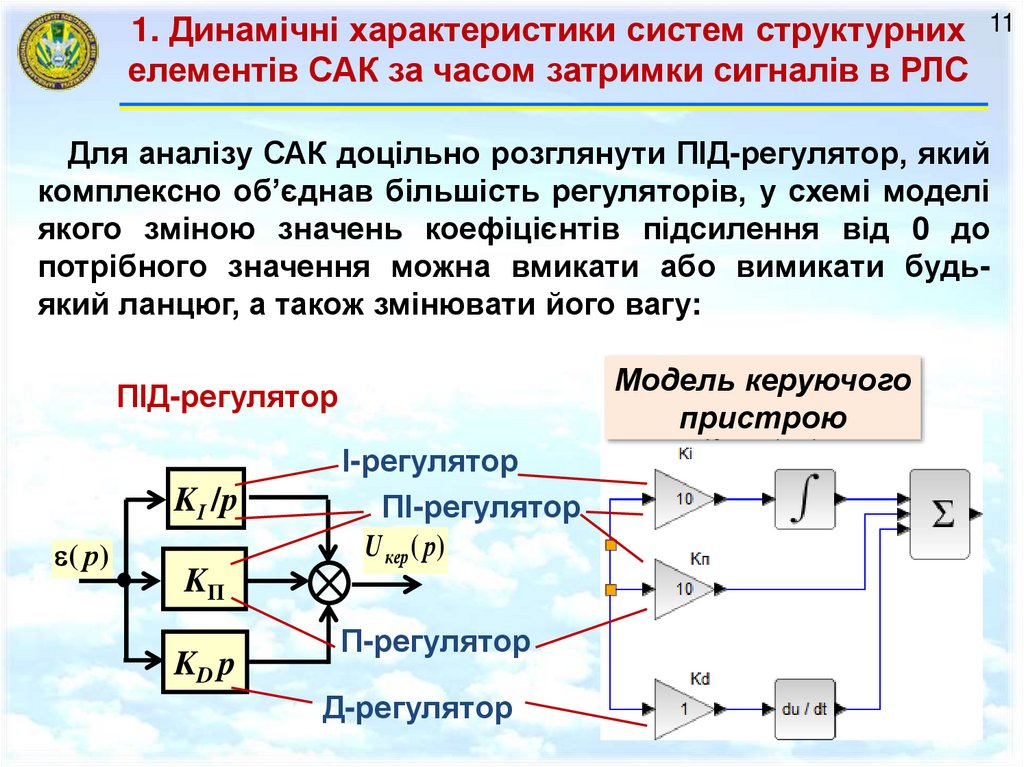
Для аналізу САК доцільно розглянути ПІД-регулятор, який
комплексно об’єднав більшість регуляторів, у схемі моделі
якого зміною значень коефіцієнтів підсилення від 0 до
потрібного значення можна вмикати або вимикати будьякий ланцюг, а також змінювати його вагу:
Модель керуючого
пристрою
ПІД-регулятор
KІ /р
( р )
І-регулятор
ПІ-регулятор
U кер ( р)
KП
KD p
П-регулятор
Д-регулятор
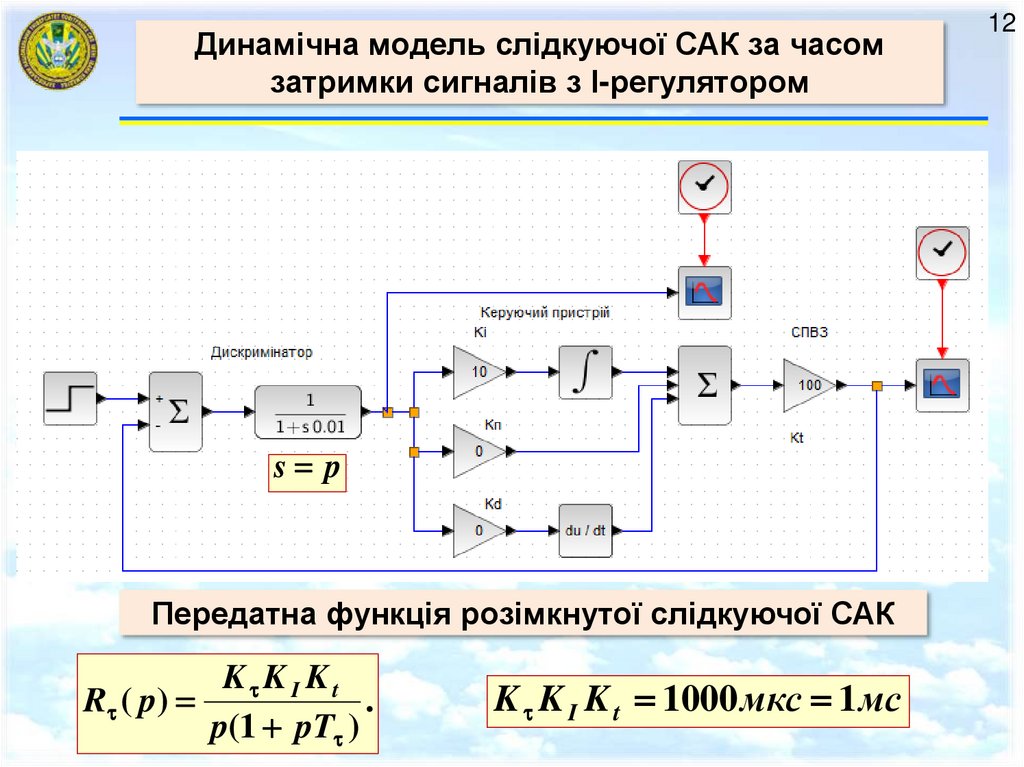
12.
Динамічна модель слідкуючої САК за часомзатримки сигналів з І-регулятором
s p
Передатна функція розімкнутої слідкуючої САК
K KI Kt
R ( p)
.
p(1 pT )
K K I K t 1000 мкс 1 мс
12
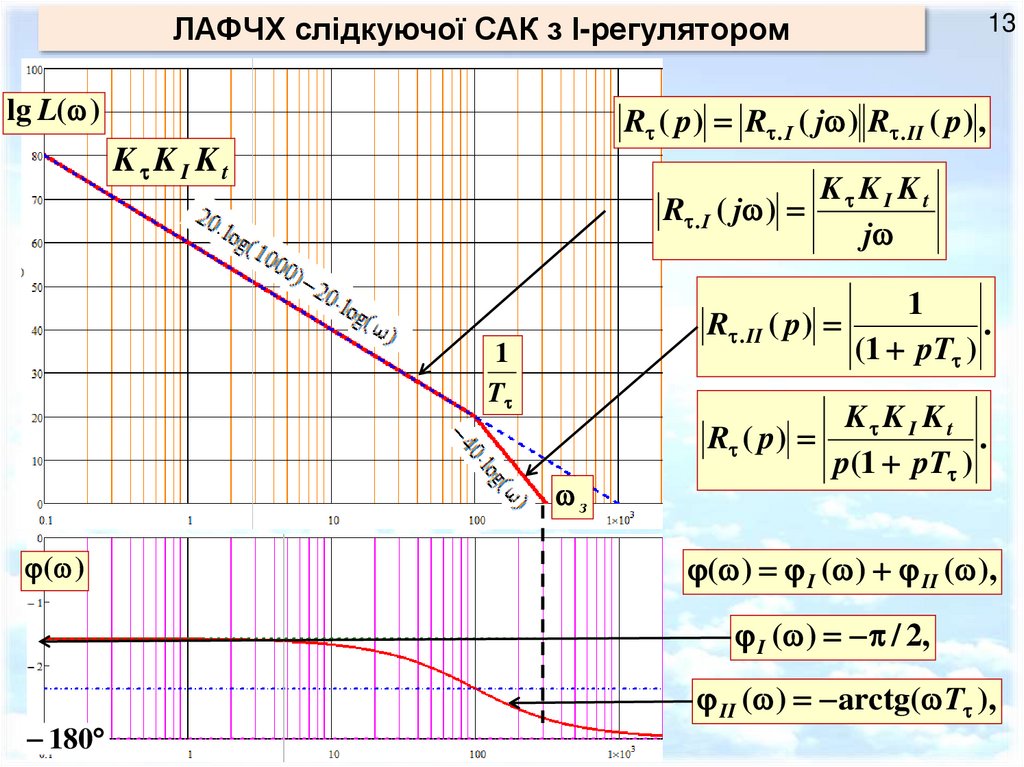
13.
ЛАФЧХ слідкуючої САК з І-регуляторомlg L( )
R ( p) R . І ( j ) R . II ( p) ,
K KI Kt
R . І ( j )
K KI Kt
j
R . II ( p)
1
T
R ( p )
з
( )
13
1
.
(1 pT )
K KI Kt
.
p(1 pT )
( ) I ( ) II ( ),
I ( ) / 2,
180
II ( ) arctg( T ),
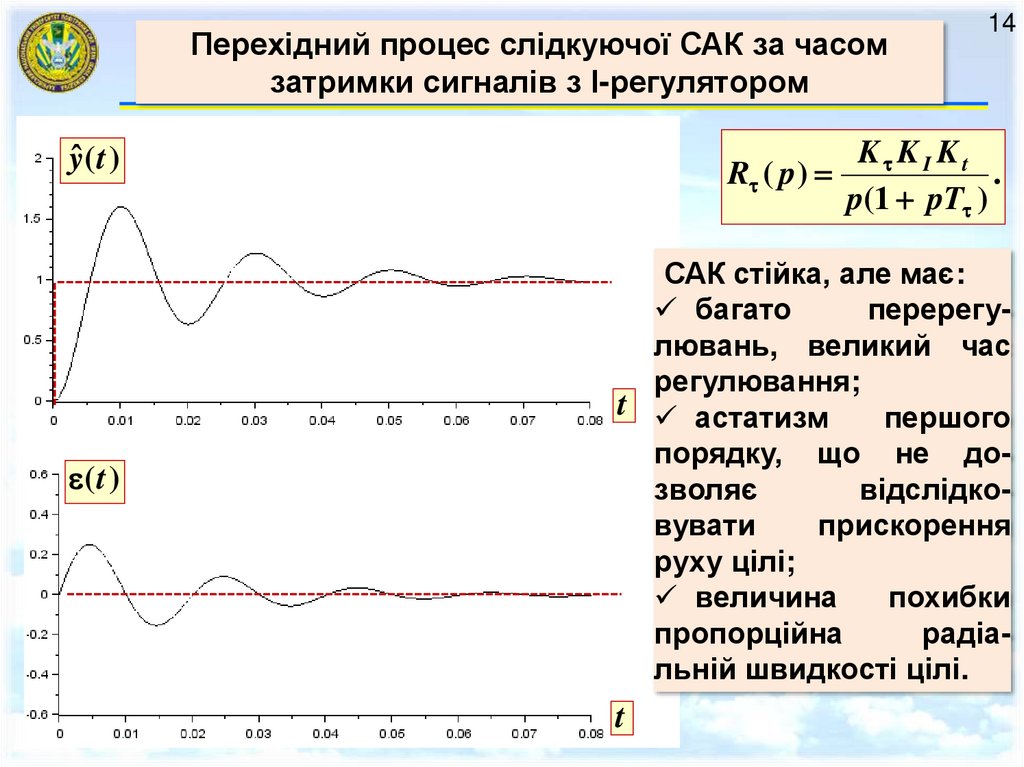
14.
Перехідний процес слідкуючої САК за часомзатримки сигналів з І-регулятором
yˆ ( t )
(t )
14
K KI Kt
R ( p)
.
p(1 pT )
САК стійка, але має:
багато
перерегулювань, великий час
регулювання;
t астатизм
першого
порядку, що не дозволяє
відслідковувати
прискорення
руху цілі;
величина
похибки
пропорційна
радіальній швидкості цілі.
t
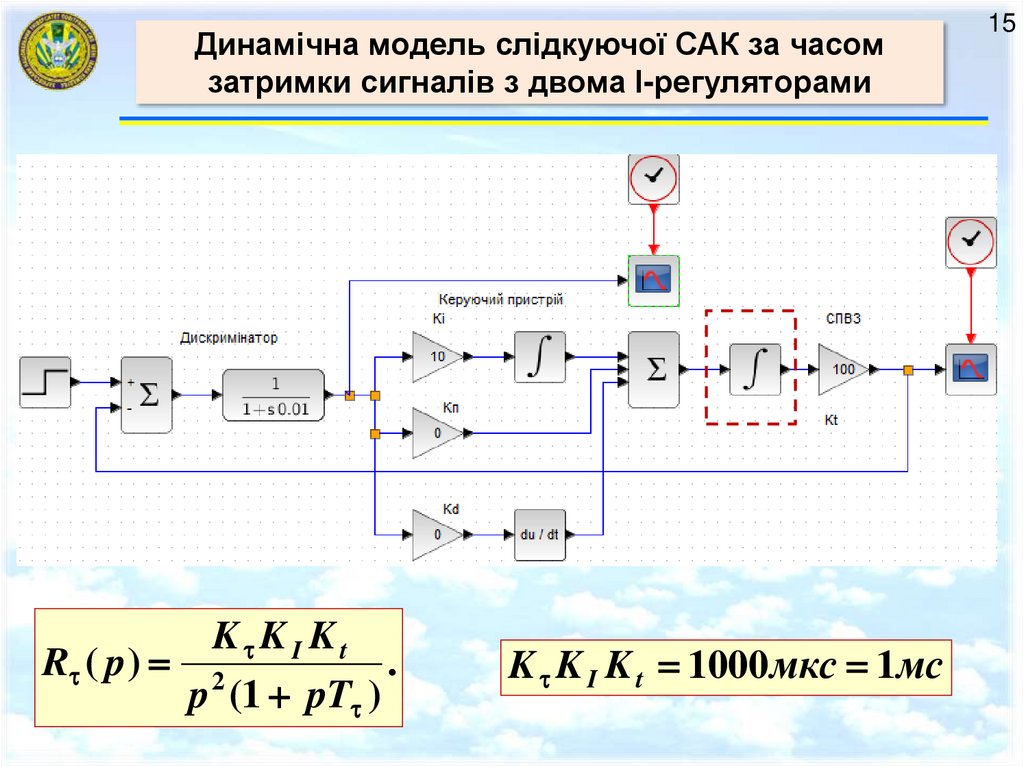
15.
Динамічна модель слідкуючої САК за часомзатримки сигналів з двома І-регуляторами
K KI Kt
R ( p ) 2
.
p (1 pT )
K K I K t 1000 мкс 1 мс
15
16.
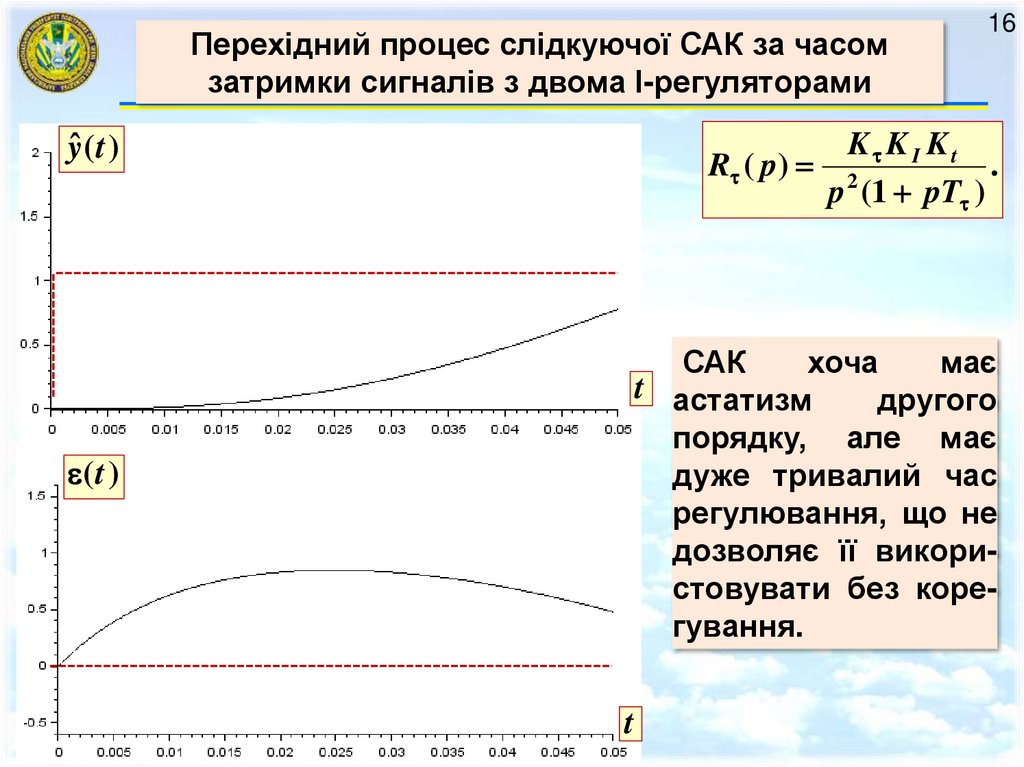
Перехідний процес слідкуючої САК за часомзатримки сигналів з двома І-регуляторами
yˆ ( t )
16
K KI Kt
R ( p ) 2
.
p (1 pT )
САК
хоча
має
t астатизм
другого
порядку, але має
дуже тривалий час
регулювання, що не
дозволяє її використовувати без корегування.
(t )
t
17.
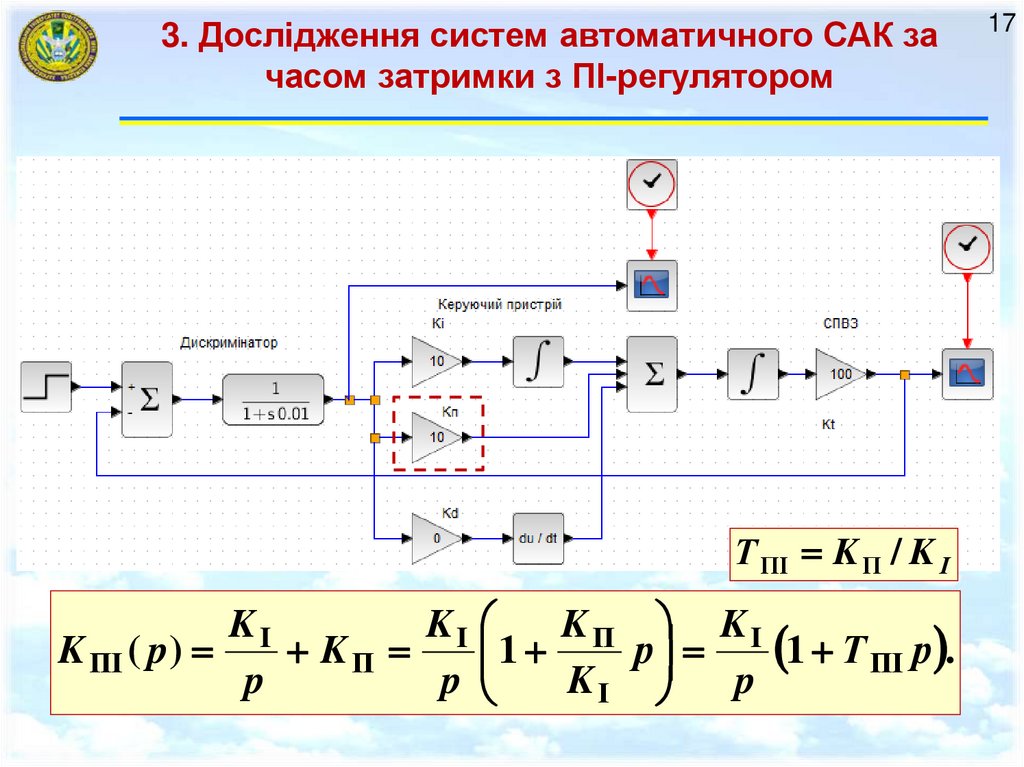
3. Дослідження систем автоматичного САК зачасом затримки з ПІ-регулятором
Т ПІ K П / K І
KI
KI
KП KI
1
1 Т ПІ р .
K ПІ ( p)
KП
р
p
p
KІ
p
17
18.
3. Дослідження систем автоматичного САК зачасом затримки з ПІ-регулятором
R ( p )
K K I K t (1 pTПI )
p (1 pT )
2
.
Т ПІ K П / K І
K K I K t 1000
18
19.
ЛАФЧХ слідкуючої САК з ПІ-регуляторомK KI K
L( )
R ( p)
1
TПІ
1
T
( )
180
з
K K I K t (1 pTПI )
.
2
p (1 pT )
19
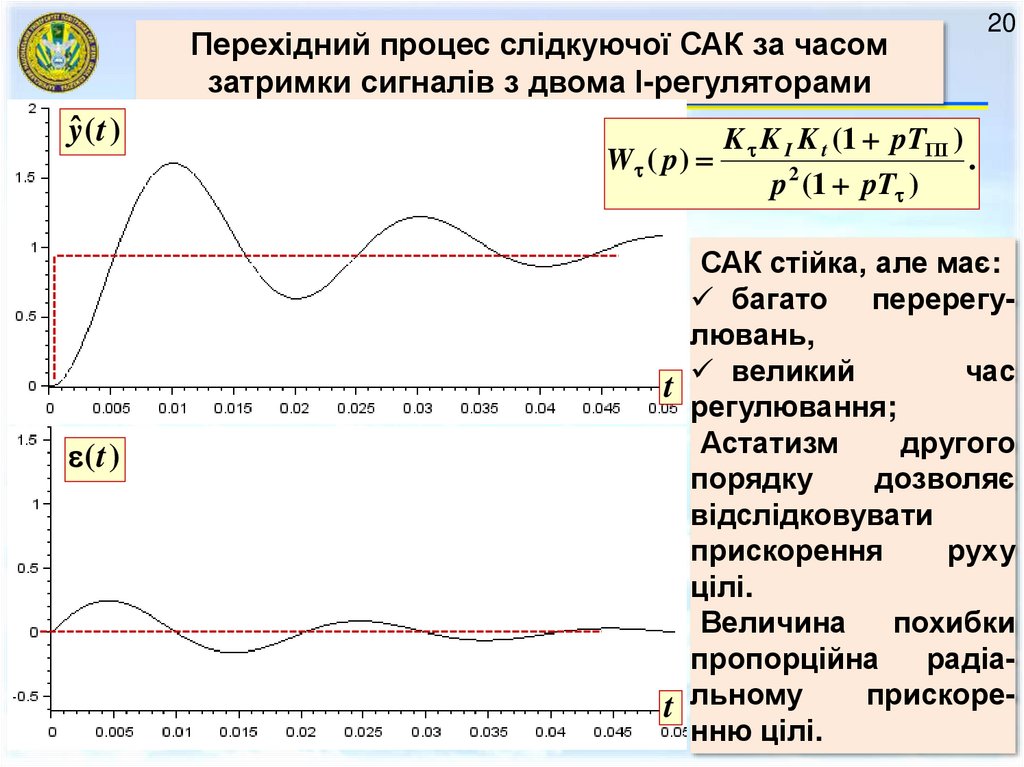
20.
Перехідний процес слідкуючої САК за часомзатримки сигналів з двома І-регуляторами
yˆ ( t )
(t )
W ( p)
20
K K I K t (1 pTПI )
.
2
p (1 pT )
САК стійка, але має:
багато перерегулювань,
час
t великий
регулювання;
Астатизм
другого
порядку
дозволяє
відслідковувати
прискорення
руху
цілі.
Величина
похибки
пропорційна
радіаприскореt льному
нню цілі.
21.
3. Дослідження систем автоматичного САК зачасом затримки з ПІD-регулятором
KI
KI
KП Kd 2
1 p
K ПID ( p)
KП Kd p
p .
р
p
KI
KI
Т ПІ K П / K І
2
Т ДІ
KД / KІ
21
22.
3. Дослідження систем автоматичного САК зачасом затримки з ПІD-регулятором
22
Т ПІ K П / K І
2
K K I K t (1 pTПI p TДI
)
R ( p)
.
2
p (1 pT )
2
2
Т ДІ
KД / KІ
K K I K t 1000
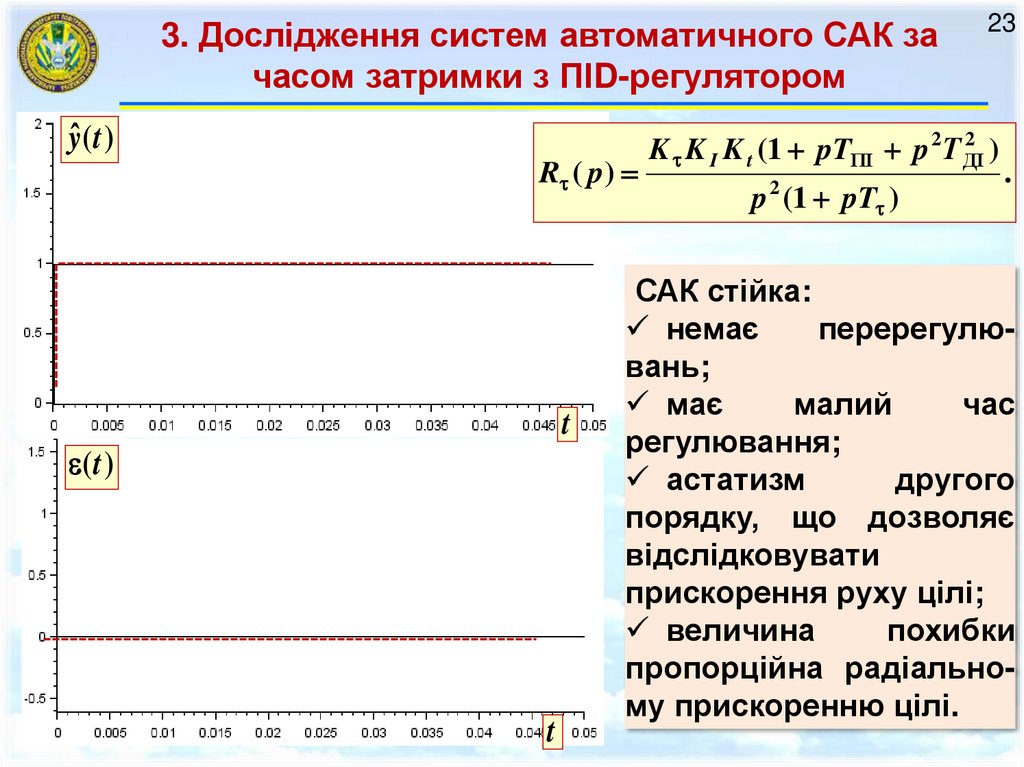
23.
3. Дослідження систем автоматичного САК зачасом затримки з ПІD-регулятором
yˆ ( t )
R ( p)
t
(t )
t
23
2
K K I K t (1 pTПI p 2Т ДІ
)
p (1 pT )
2
.
САК стійка:
немає
перерегулювань;
має
малий
час
регулювання;
астатизм
другого
порядку, що дозволяє
відслідковувати
прискорення руху цілі;
величина
похибки
пропорційна радіальному прискоренню цілі.