







 programming
programmingSimilar presentations:









")
Разработка проекта системы мониторинга и управления технологическим процессом для заданного производственного модуля
1.
Разработка проекта системы мониторинга иуправления технологическим процессом для
заданного производственного модуля
Выполнил:Андреев Никита Павлович
Гриша
2.
Задача• Подготовить предварительное
техническое предложение по
разработке системы мониторинга и
управления технологическим
процессом для заданного
производственного модуля (гибкой
производственной ячейки).
3.
Содержание4.
Описание вещей• Andreev_robot1 = Робот
• Andreev_TrafficLights = Сфетофор
• Andreev_SmartCamera = камера, для просмотра предметов переноса
• Andreev_BarcodeReader = показывает сколько раз исп. Код.
• Andreev_LineBerier = барьер, для ограничение расстояние роботов
• Andreev_RemoteTerminal = кнопки.
5.
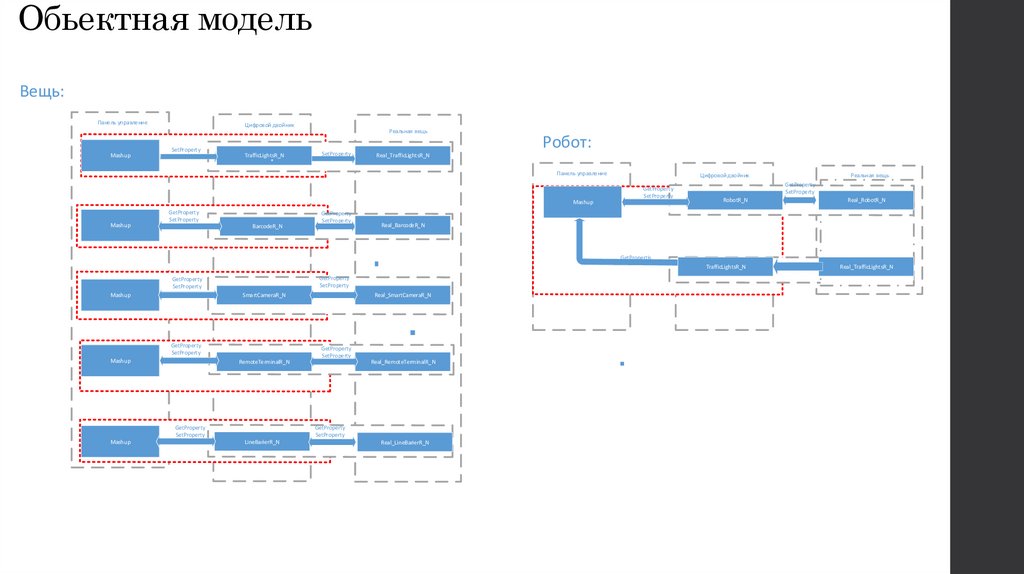
Обьектная модельВещь:
Панель управление
Цифровой двойник
Реальная вещь
Mashup
SetProperty
TrafficLightsR_N
SetProperty
Робот:
Real_TrafficLightsR_N
Панель управление
Mashup
Mashup
GetProperty
SetProperty
BarcodeR_N
GetProperty
SetProperty
Цифровой двойник
GetProperty
SetProperty
Реальная вещь
GetProperty
SetProperty
RobotR_N
Real_RobotR_N
Real_BarcodeR_N
GetPropertis
TrafficLightsR_N
GetProperty
SetProperty
GetProperty
SetProperty
Mashup
SmartCameraR_N
GetProperty
SetProperty
Mashup
GetProperty
SetProperty
RemoteTerminalR_N
GetProperty
SetProperty
Mashup
Real_SmartCameraR_N
Real_RemoteTerminalR_N
GetProperty
SetProperty
LineBarierR_N
Real_LineBarierR_N
Real_TrafficLightsR_N
6.
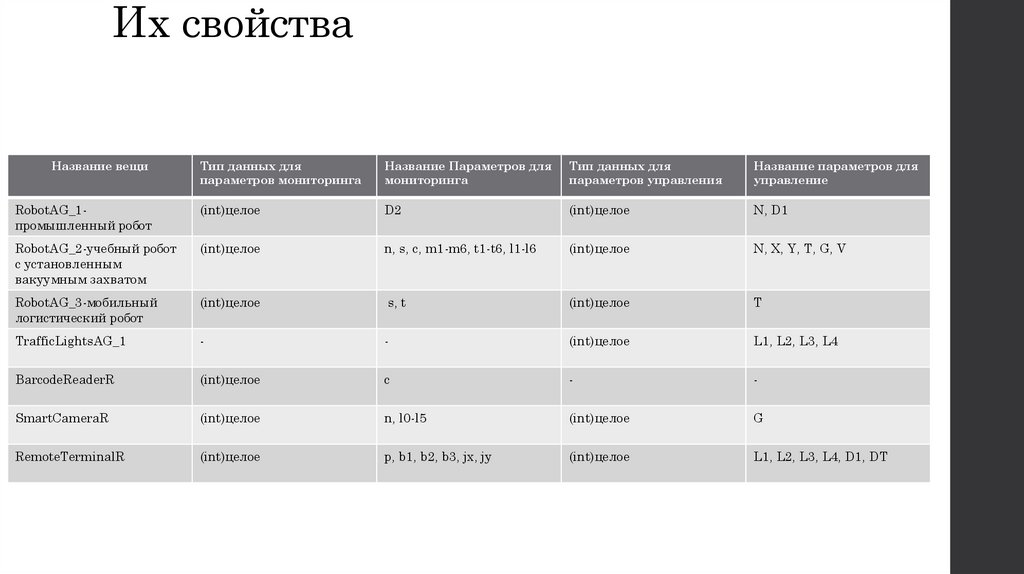
Их свойстваНазвание вещи
Тип данных для
параметров мониторинга
Название Параметров для
мониторинга
Тип данных для
параметров управления
Название параметров для
управление
RobotAG_1промышленный робот
(int)целое
D2
(int)целое
N, D1
RobotAG_2-учебный робот
с установленным
вакуумным захватом
(int)целое
n, s, c, m1-m6, t1-t6, l1-l6
(int)целое
N, X, Y, T, G, V
RobotAG_3-мобильный
логистический робот
(int)целое
s, t
(int)целое
T
TrafficLightsAG_1
-
-
(int)целое
L1, L2, L3, L4
BarcodeReaderR
(int)целое
c
-
-
SmartCameraR
(int)целое
n, l0-l5
(int)целое
G
RemoteTerminalR
(int)целое
p, b1, b2, b3, jx, jy
(int)целое
L1, L2, L3, L4, D1, DT
7.
8.
ИмяКлюч
Описание
Тип данных
Его
сервис
Его вещь
Vacuum
V
Фиксирует предмет
Целое
InOut
RobotAS_ Управ
1
От 0 до 1
Gripper
G
Спускает робота,
подымает
Целое
InOut
RobotAS_ Управ
1
От 0 до 1
Position_
X
X
Координата X проекции
положения рабочего
инструмента робота на
поверхность рабочей зоны
Целое
InOut
RobotAS_ Управ
1
Position_
Y
Y
Координата Y проекции
положения рабочего
инструмента
Целое
InOut
RobotAS_ Управ
1
Position_
T
T
Кордината управление
Целое
InOut
RobotAS_ Управ
1
Motor1… m
6
Тип свойства
(мон/управ)
Допустимый диапозон(для
переработанных)
9.
Описание мониторинговых параметров и параметров управления - RobotAG_1(Промышленный робот манипулятор)
Мониторинговые: D2 – фаза (код) выполняемого действия (микропрограммы)
Мониторинговые:
D2 – фаза (код) выполняемого
действия (микропрограммы)
Управления:
N – Номер команды / пакета данных
D1 – Целевая позиция (код
микропрограммы)
10.
Описание мониторинговых параметров и параметров управления - RobotAG_2 (Учебный роботманипулятор с установленным вакуумным захватом)
Мониторинговые:
n – Номер предыдущей
обработанной команды / пакета
данных
s - Статус системы управления: (1
– выполняет команду, 0 –
ожидание)
с - Внутренний счетчик робота
выполненных действий
(m1 … m6) - «Сырое» значение
абсолютного энкодера мотора.
(t1 … t6) - Температура
серомоторов.
(l1 … l6) - Нагрузка сервомоторов.
Управления:
N – Номер команды / пакета
данных
X - Координата X проекции
положения рабочего инструмента
робота на поверхность рабочей зоны
Y - Координата Y проекции
положения рабочего инструмента
робота на поверхность рабочей зоны
T - Угол поворота инструмента в
градусах
G - Уровень положения схвата (0 –
нижнее, 1 – промежуточное, 2 –
верхнее)
V - Режим вакуумного захвата (1 –
включить, 0 – выключить)
11.
Описание мониторинговых параметров и параметров управления - RobotAG_3 (Мобильныйлогистический робот)
Мониторинговые:
s - Статус выполнения команды
T - Текущая целевая позиция
Управления:
T - Целевая позиция
12.
Описание мониторинговых параметров и параметров управления - TrafficLightsR_N(светосигнальная лампа)
Управления:
L1 - Состояние синей лампы
1 – включена, 0 – отключена
L2 - Состояние красной лампы 1 –
включена, 0 – отключена
L3 - Состояние желтой лампы 1 –
включена, 0 – отключена
L4 - Состояние зеленой лампы 1 –
включена, 0 - отключена
Мониторинговые: отсутствуют
13.
Описание мониторинговых параметров и параметров управления – BarcodeReaderR(считыватель штри-кодов)
Мониторинговые:
c – Считанный код
Параметры управления: отсутствуют
14.
Описание мониторинговых параметров и параметров управления - SmartCameraR(смарткамера в режиме распознавания деталей)
Мониторинговые:
n - Счетчик распознанных
кадров
(l0 … l5) - «Строки»
выраженные в виде чисел,
выровненных по правому
краю
Управления:
G - Режим считывания:
0 – не считывать
1 – сбросить счетчик
2 – считать изображение
15.
Описание мониторинговых параметров и параметров управления - RemoteTerminalR (пультуправления производственной линией)
Мониторинговые:
p - Считанный код
(режим
переключателя)
B1 - Считанный код
(количество нажатий
кнопки)
B2 - Считанный код
B3 - Считанный код
jx - Ось Х джойстика
Jy - Ось Y джойстика
Управления:
L1 - Состояние синей лампы 1 –
включена, 0 – отключена
L2 - Состояние красной лампы 1 –
включена, 0 – отключена
L3 - Состояние желтой лампы 1 –
включена, 0 – отключена
L4 - Состояние зеленой лампы 1 –
включена, 0 - отключена
D1 - Номер строки текстового
дисплея
DT - Hex-кодированная текстовая
строка (нижний регистр)
16.
Описание мониторинговых параметров и параметров управления - LightBarrierR (Световойбарьер)
Мониторинговые:
d1 – Дистанция (см)
d2 – Дистанция (см)
d3 - Дистанция (см)
Управления: отсутствуют
17.
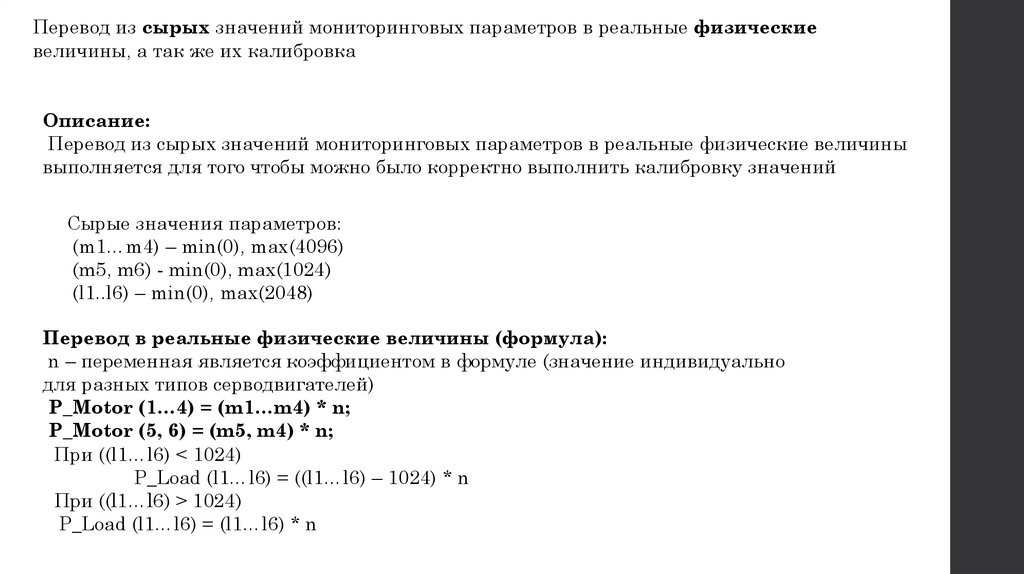
Перевод из сырых значений мониторинговых параметров в реальные физическиевеличины, а так же их калибровка
Описание:
Перевод из сырых значений мониторинговых параметров в реальные физические величины
выполняется для того чтобы можно было корректно выполнить калибровку значений
Сырые значения параметров:
(m1…m4) – min(0), max(4096)
(m5, m6) - min(0), max(1024)
(l1..l6) – min(0), max(2048)
Перевод в реальные физические величины (формула):
n – переменная является коэффициентом в формуле (значение индивидуально
для разных типов серводвигателей)
P_Motor (1…4) = (m1…m4) * n;
P_Motor (5, 6) = (m5, m4) * n;
При ((l1…l6) < 1024)
P_Load (l1…l6) = ((l1…l6) – 1024) * n
При ((l1…l6) > 1024)
P_Load (l1…l6) = (l1…l6) * n
18.
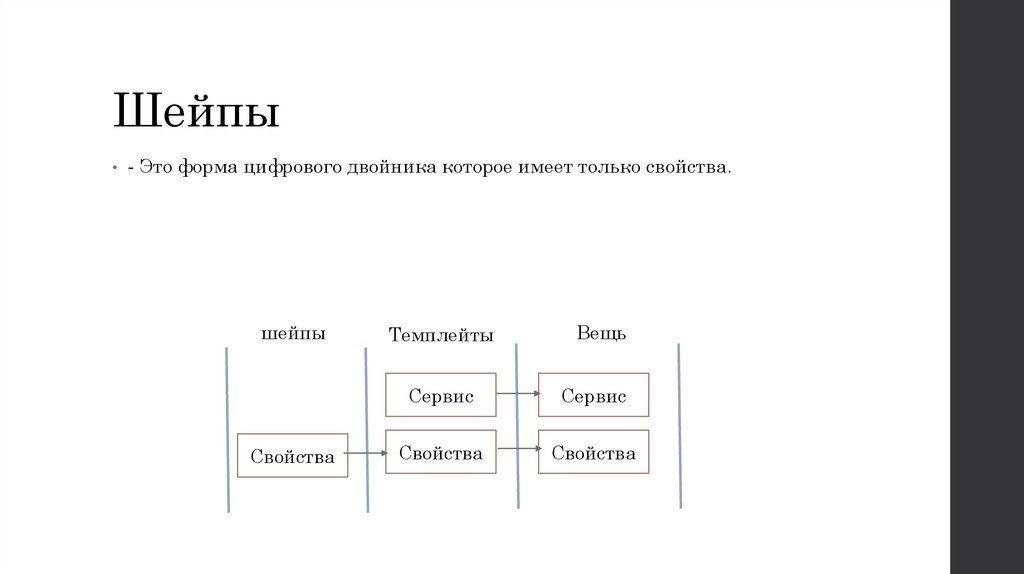
Шейпы• - Это форма цифрового двойника которое имеет только свойства.
шейпы
Свойства
Темплейты
Вещь
Сервис
Сервис
Свойства
Свойства
19.
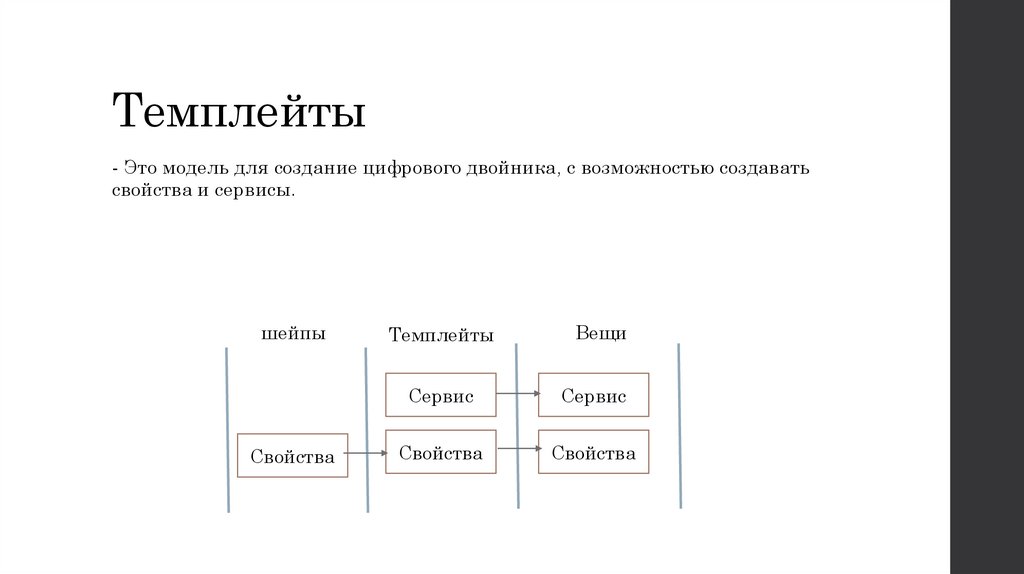
Темплейты- Это модель для создание цифрового двойника, с возможностью создавать
свойства и сервисы.
шейпы
Свойства
Темплейты
Вещи
Сервис
Сервис
Свойства
Свойства
20.
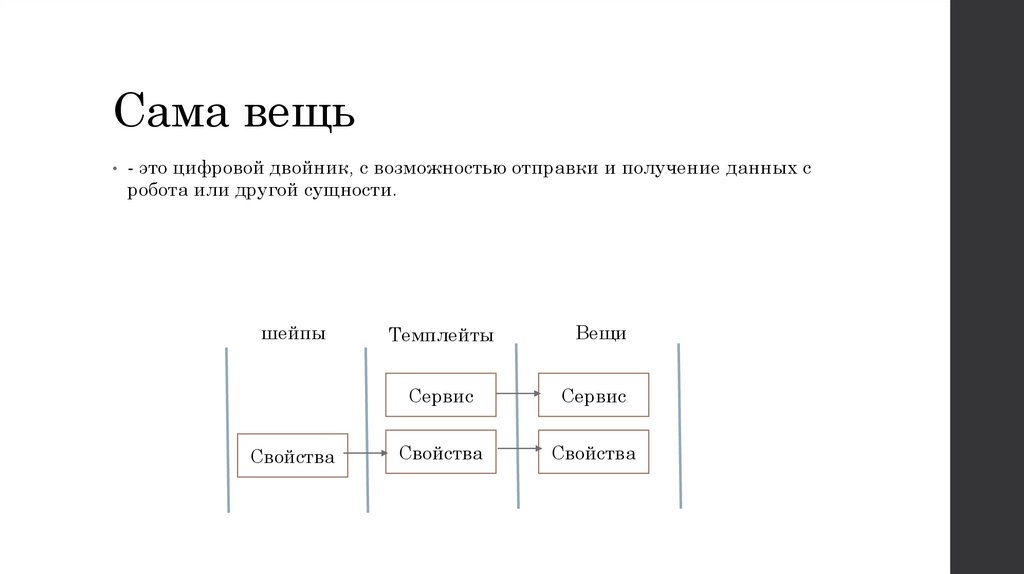
Сама вещь• - это цифровой двойник, с возможностью отправки и получение данных с
робота или другой сущности.
шейпы
Свойства
Темплейты
Вещи
Сервис
Сервис
Свойства
Свойства
21.
Название вещей и их сервисы сосвойствами
22.
объектная модель с generic thing иостальные сервисы
23.
Мешапы-меню для управление вещью
Andreev_OperatorABM = управление цифровой
Andreev_limit = назначение критическими значениями
Andreev_Panel = доп. показывает температуры, нагрузки, моторов и позиции
Andreev_Engineer = показывает значение температуры, нагрузки, моторов,
моделью.
позиции, действия сетевого барьера, действия кнопок и лимит темп.
Andreev_CateleteUmuMenu = управление машапами
24.
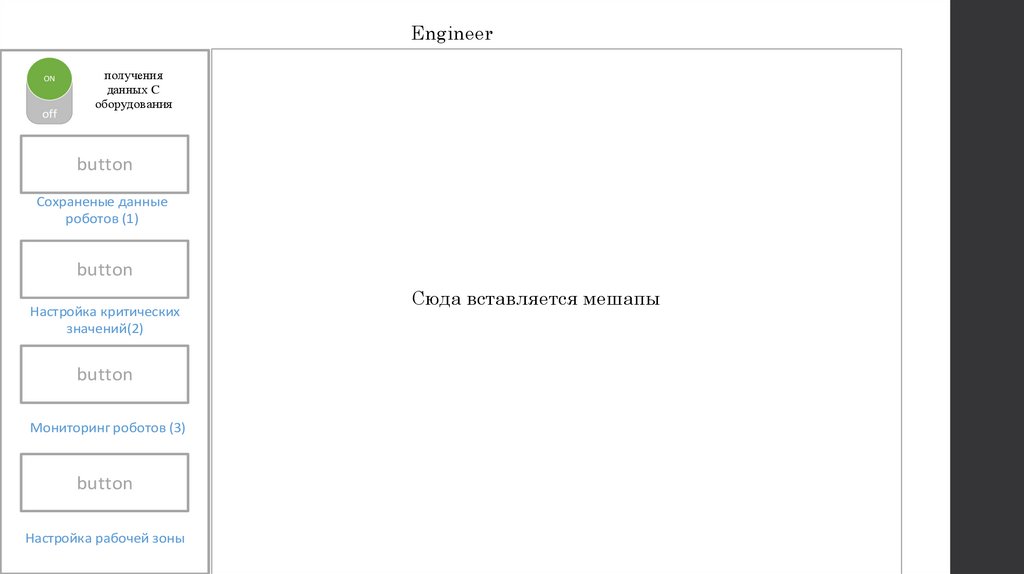
EngineerON
off
получения
данных C
оборудования
button
Сохраненые данные
роботов (1)
button
Настройка критических
значений(2)
button
Мониторинг роботов (3)
button
Настройка рабочей зоны
Сюда вставляется мешапы
25.
Engineer (доп)Сохранные данные(1)
Данные с робота
Панель мониторинга(3)
Сырые данные с робота
LED
LED
LED
LED
LED
LED
LED Дисплей
Температуры
LED Дисплей Мотора
LED Дисплей
Загрузки
LED Дисплей
Температуры
LED Дисплей Мотора
LED Дисплей
Загрузки
LED
LED
LED
LED
LED
LED
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED
LED
LED
LED
LED
LED
LED Дисплей
Температуры
LED Дисплей
Температуры
LED Дисплей
Загрузки
LED Дисплей
Температуры
LED Дисплей
Температуры
LED Дисплей
Загрузки
LED
LED
LED
LED
LED
LED
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED
LED
LED
LED
LED
LED
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED
LED
LED
LED
LED
LED
Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
Критические сырые данные
Критические данные
Сырые данные с робота
LED
LED
LED
LED
LED
LED
LED Дисплей
Температуры
LED Дисплей Мотора
LED Дисплей
Загрузки
LED Дисплей
Температуры
LED Дисплей Мотора
LED Дисплей
Загрузки
LED
LED
LED
LED
LED
LED
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED
LED
LED
LED
LED
LED
LED Дисплей
Температуры
LED Дисплей
Температуры
LED Дисплей
Загрузки
LED Дисплей
Температуры
LED Дисплей
Температуры
LED Дисплей
Загрузки
LED
LED
LED
LED
LED
LED
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED
LED
LED
LED
LED
LED
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED
Дисплей
Температуры
LED
LED
LED
LED
LED
LED Дисплей
Мотора
LED Дисплей
Загрузки
LED Дисплей
Температуры
LED Дисплей
Мотора
LED Дисплей
Загрузки
Критические сырые данные
Критические данные
LED
LED
LED
LED
LED
LED
LED Критические
LED Критические
значение Мотора
LED Критические
LED Критические
значение
Температуры
LED Критические
значение Мотора
LED Критические
значение
Загрузки
значение
Температуры
Данные с робота
значение
Загрузки
Данные с робота
LED
LED
LED
LED
LED
LED
LED Критические
LED Критические
LED Критические
LED Критические
LED Критические
LED Критические
значение
Температуры
значение Мотора
значение
Загрузки
значение
Температуры
значение Мотора
значение
Загрузки
Данные с робота
Измеритель
Температуры
цельсий
Измеритель
Температуры
цельсий
Измеритель
Температуры
цельсий
Измеритель
Температуры
цельсий
Измеритель
Температуры
цельсий
Измеритель
Температуры
цельсий
Измеритель
Температуры
цельсий
Измеритель
Температуры
цельсий
Измеритель
Температуры
цельсий
Измеритель
Температуры
цельсий
Измеритель
Температуры
цельсий
Измеритель
Температуры
цельсий
Измеритель Мотора
в пельменях
Измеритель Мотора
в пельменях
Измеритель Мотора
в пельменях
Измеритель Мотора
в пельменях
Измеритель Мотора
в пельменях
Измеритель Мотора
в пельменях
Измеритель Мотора
в пельменях
Измеритель Мотора
в пельменях
Измеритель Мотора
в пельменях
Измеритель Мотора
в пельменях
Измеритель Мотора
в пельменях
Измеритель Мотора
в пельменях
Измеритель
Загрузки в мантах
Измеритель
Загрузки в мантах
Измеритель
Загрузки в мантах
Измеритель
Загрузки в мантах
Измеритель
Загрузки в мантах
Измеритель
Загрузки в мантах
Измеритель
Загрузки в мантах
Измеритель
Загрузки в мантах
Измеритель
Загрузки в мантах
Измеритель
Загрузки в мантах
Измеритель
Загрузки в мантах
Измеритель
Загрузки в мантах
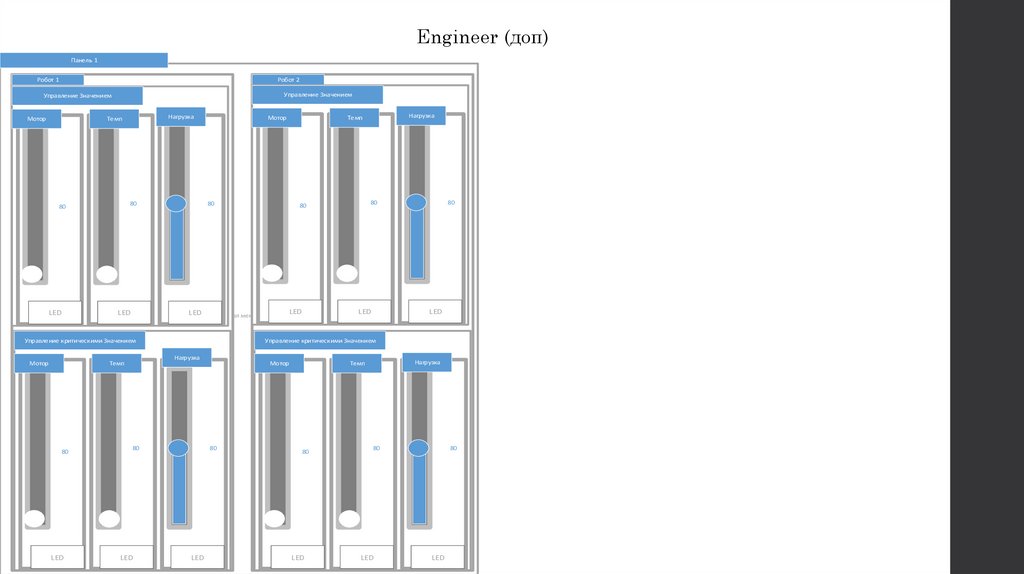
26.
Engineer (доп)Панель 1
Робот 1
Робот 2
Управление Значением
Управление Значением
Мотор
Нагрузка
Темп
80
80
80
Мотор
LED
LED
LED для просмотра и действий
LED
Панель
которая меняеться после вкл специальных кнопок
Управление критическими Значением
Мотор
80
LED
Управление критическими Значением
Нагрузка
Темп
Мотор
80
80
LED
80
80
80
LED
LED
Нагрузка
Темп
LED
Нагрузка
Темп
80
LED
80
80
LED
LED
27.
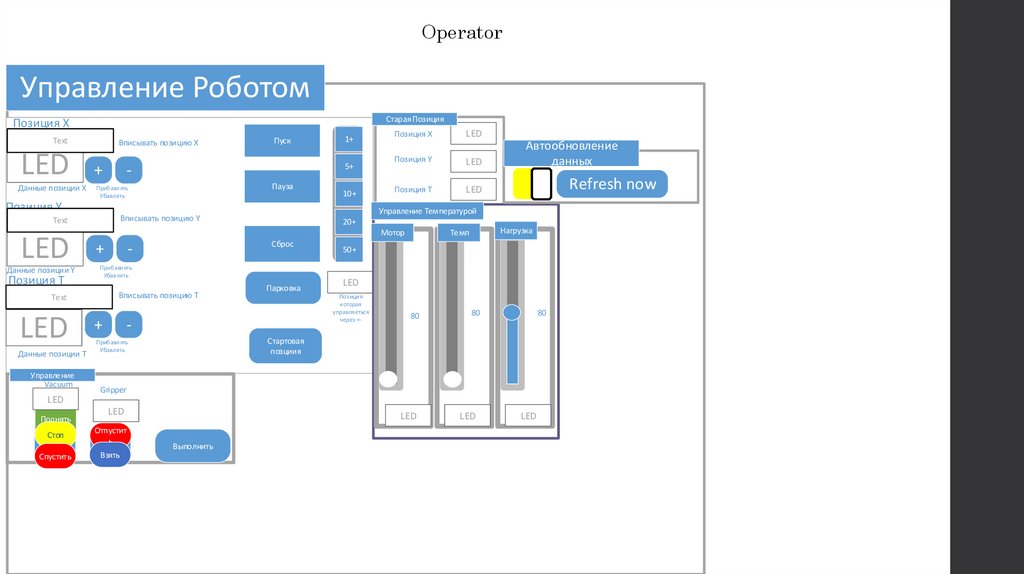
OperatorУправление Роботом
Старая Позиция
Позиция X
Text
LED
Данные позиции X
Вписывать позицию X
+
Пуск
1+
5+
Пауза
Прибавл ять
Убавлять
10+
Позиция Y
LED
Данные позиции Y
Позиция T
Данные позиции T
Управление
Vacuum
Позиция Y
LED
Позиция T
LED
20+
Мотор
+
Сброс
-
Прибавл ять
Убавлять
Вписывать позицию T
Text
LED
LED
+
Автообновление
данных
Refresh now
Управление Температурой
Вписывать позицию Y
Text
Позиция X
Парковка
50+
LED
Позиция
которая
управляеться
через +-
-
Нагрузка
Темп
80
80
LED
LED
80
Стартовая
позциия
Прибавл ять
Убавлять
Gripper
LED
Поднять
LED
Стоп
Отпустит
ь
Спустить
Взять
Выполнить
LED
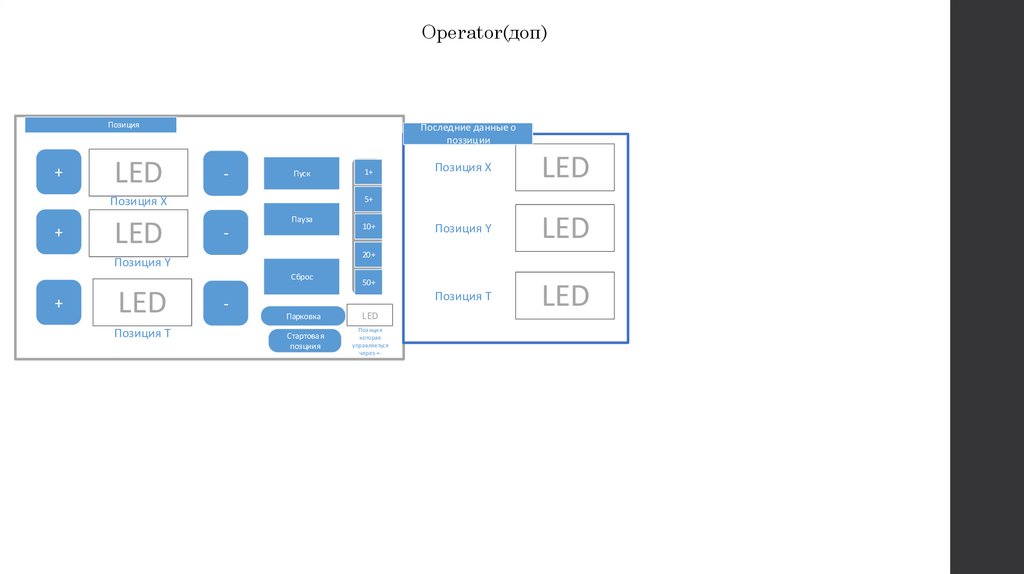
28.
Operator(доп)Позиция
+
LED
Последние данные о
поззиции
-
Пуск
LED
Пауза
Сброс
LED
Позиция T
LED
10+
Позиция Y
LED
Позиция T
LED
20+
Позиция Y
+
Позиция X
5+
Позиция X
+
1+
-
50+
Парковка
LED
Стартовая
позциия
Позиция
которая
управляеться
через +-
29.
как вещи на мешапкидаются и что где
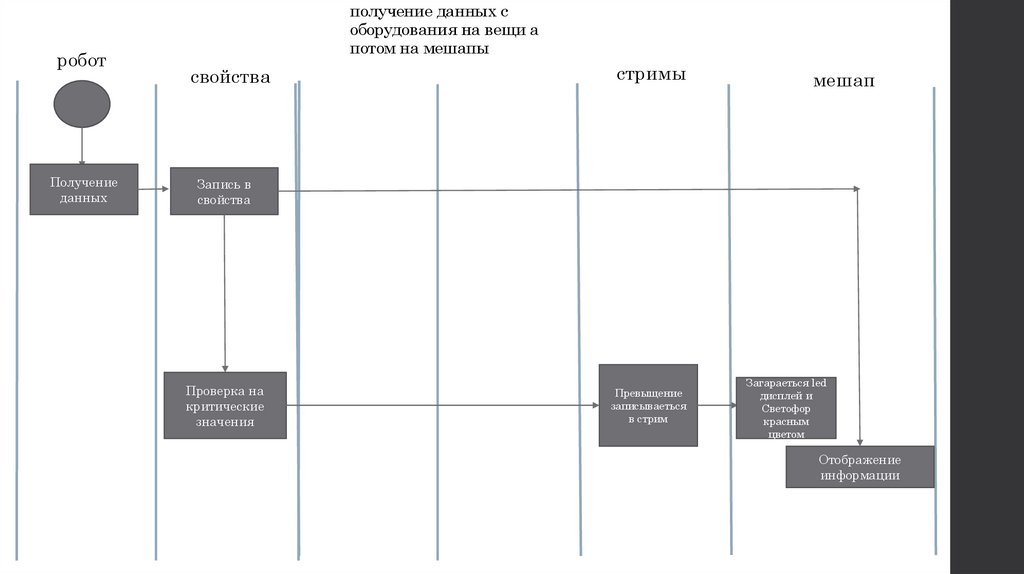
30.
роботПолучение
данных
получение данных с
оборудования на вещи а
потом на мешапы
свойства
стримы
мешап
Запись в
свойства
Проверка на
критические
значения
Превыщение
записываеться
в стрим
Загараеться led
дисплей и
Светофор
красным
цветом
Отображение
информации
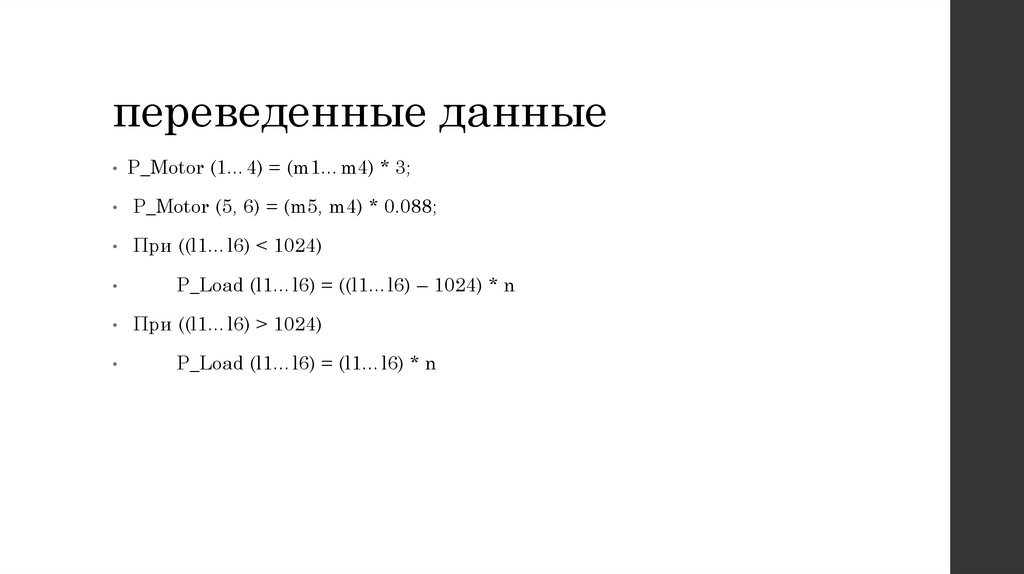
31.
переведенные данные• P_Motor (1…4) = (m1…m4) * 3;
P_Motor (5, 6) = (m5, m4) * 0.088;
При ((l1…l6) < 1024)
P_Load (l1…l6) = ((l1…l6) – 1024) * n
При ((l1…l6) > 1024)
P_Load (l1…l6) = (l1…l6) * n
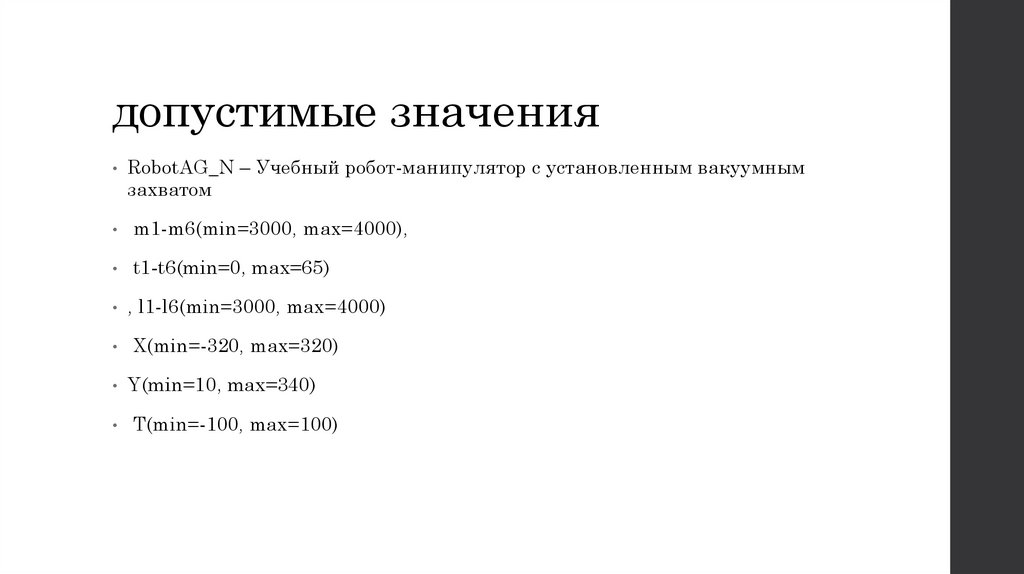
32.
допустимые значения• RobotAG_N – Учебный робот-манипулятор с установленным вакуумным
захватом
m1-m6(min=3000, max=4000),
t1-t6(min=0, max=65)
• , l1-l6(min=3000, max=4000)
X(min=-320, max=320)
• Y(min=10, max=340)
T(min=-100, max=100)
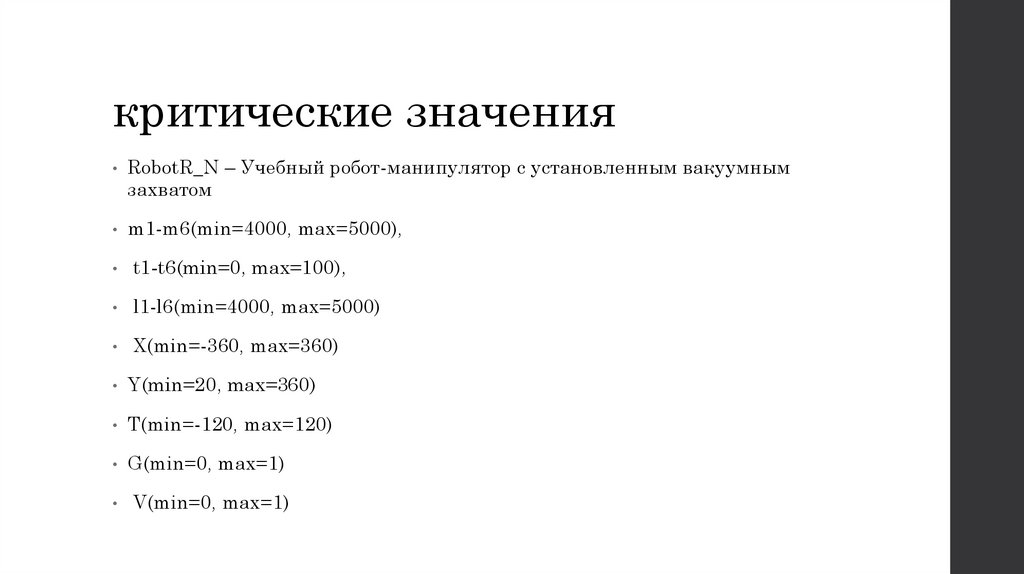
33.
критические значения• RobotR_N – Учебный робот-манипулятор с установленным вакуумным
захватом
• m1-m6(min=4000, max=5000),
t1-t6(min=0, max=100),
l1-l6(min=4000, max=5000)
X(min=-360, max=360)
• Y(min=20, max=360)
• T(min=-120, max=120)
• G(min=0, max=1)
V(min=0, max=1)
34.
логи35.
описание таблиц с критами, чтотуда
36.
триггеры• Уведомляет пользователя о ошибке или о превышение критических
значений
37.
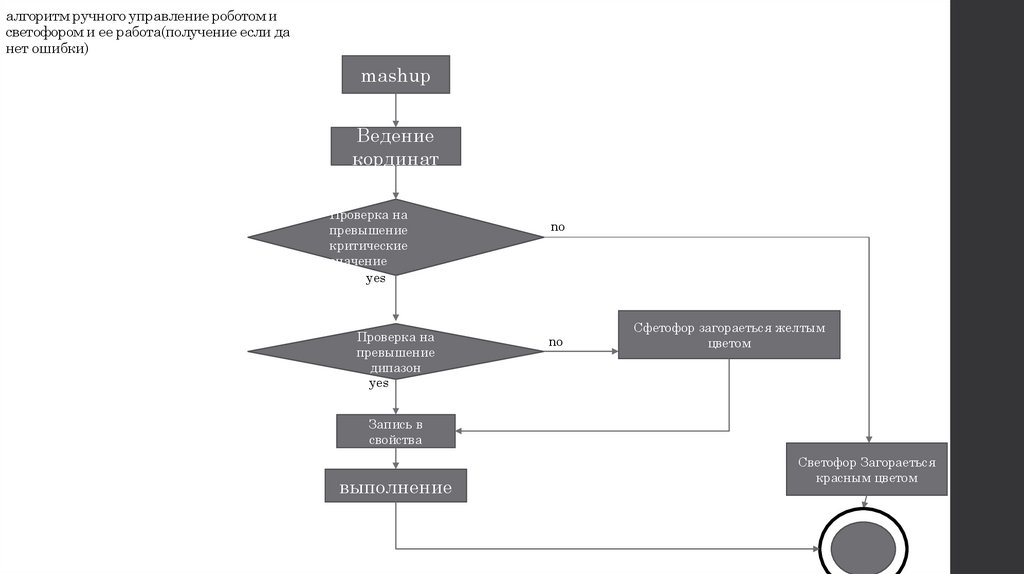
алгоритм ручного управление роботом исветофором и ее работа(получение если да
нет ошибки)
mashup
Ведение
кординат
Проверка на
превышение
критические
значение
yes
Проверка на
превышение
дипазон
yes
no
no
Сфетофор загораеться желтым
цветом
Запись в
свойства
выполнение
Светофор Загораеться
красным цветом
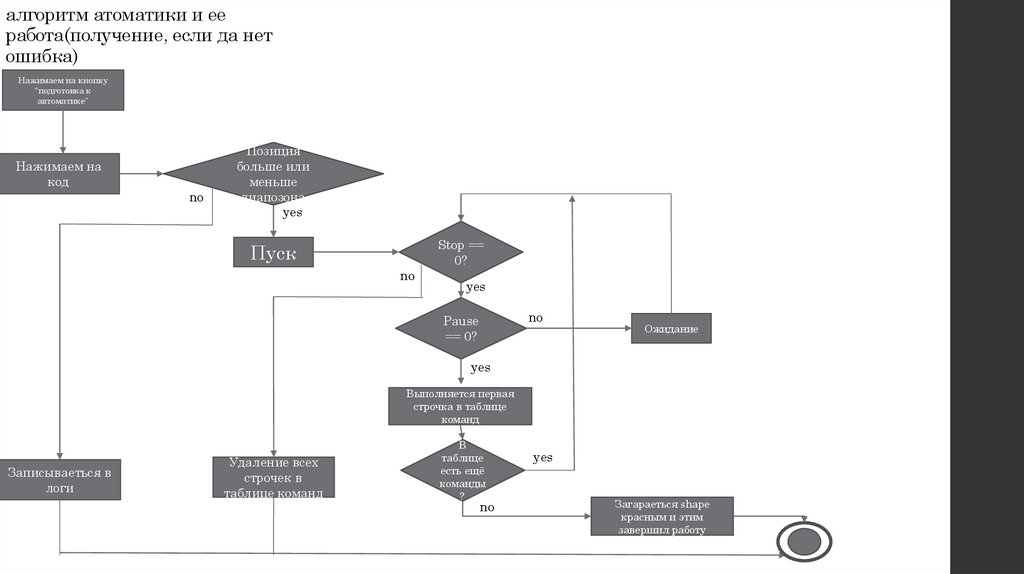
38.
алгоритм атоматики и ееработа(получение, если да нет
ошибка)
Нажимаем на кнопку
“подготовка к
автоматике”
Нажимаем на
код
no
Позиция
больше или
меньше
диапозона
yes
Stop ==
0?
Пуск
no
yes
no
Pause
== 0?
Ожидание
yes
Выполняется первая
строчка в таблице
команд
Записываеться в
логи
Удаление всех
строчек в
таблице команд
В
таблице
есть ещё
команды
?
no
yes
Загараеться shape
красным и этим
завершил работу