






 physics
physicsSimilar presentations:


. Способы пуска и торможения")







Электрические машины и электропривод (лекция 5)
1.
Самарский государственный университет путей сообщенияЭЛЕКТРИЧЕСКИЕ МАШИНЫ
И ЭЛЕКТРОПРИВОД»
Автор: БУШТРУК Т. Н.
г. Самара 2020
2.
ОСНОВНЫЕПОНЯТИЯ
И
ОПРЕДЕЛЕНИЯ
Большая часть рабочих машин и механизмов приводится в
действие электроприводами (ЭП). В настоящее время, благодаря
высокому уровню развития техники электропривод выполняют в
виде автоматизированного электропривода (АЭП)
С помощью АЭП осуществляют необходимые перемещения в
станках, различных перерабатывающих машинах, транспортных
средствах, в подъемных установках и т. д. Более половины
производимой электроэнергии потребляется ЭП. Особенность
АЭП состоит в том, что преобразование информации,
необходимой для управления потоками энергии, осуществляется
автоматически.
Электрический привод – является электромеханической системой,
которая обеспечивает движение исполнительных (рабочих)
органов рабочих машин и механизмов и управление этим
движением.
3.
СТРУКТУРНАЯ-СХЕМА СИСТЕМЫ ЭЛЕКТРОПРИВОДА.
Рисунок 1
Элементы на блок-схемы имеют следующее функциональное назначение: ИЭ – источник
энергии, СП – силовой преобразователь, ЭД – электродвигатель, ПУ – передаточное
устройство, ИО – исполнительный орган, БУ – блок управления. Совокупность силового
преобразователя и блока управления является системой управления (СУ) – СП + БУ = СУ.
Совокупность силового преобразователя, блока управления, электродвигателя,
передаточного устройства образует, собственно, электропривод (ЭП). СП – преобразует
поступающую электроэнергию на ЭД в соответствии с требуемыми параметрами. БУ –
осуществляет функции управления и автоматизации ЭП, вырабатывает сигнал управления
UУ в соответствии с задающим сигналом UЗ; регулирует работу всех блоков ЭП, изменяет
мощность на валу рабочего механизма, значение и частоту напряжения, схему включения
ЭД, направление вращения ЭД и т. д. ПУ служит для изменения скорости до значения,
необходимого исполнительному органу рабочей машины.
4.
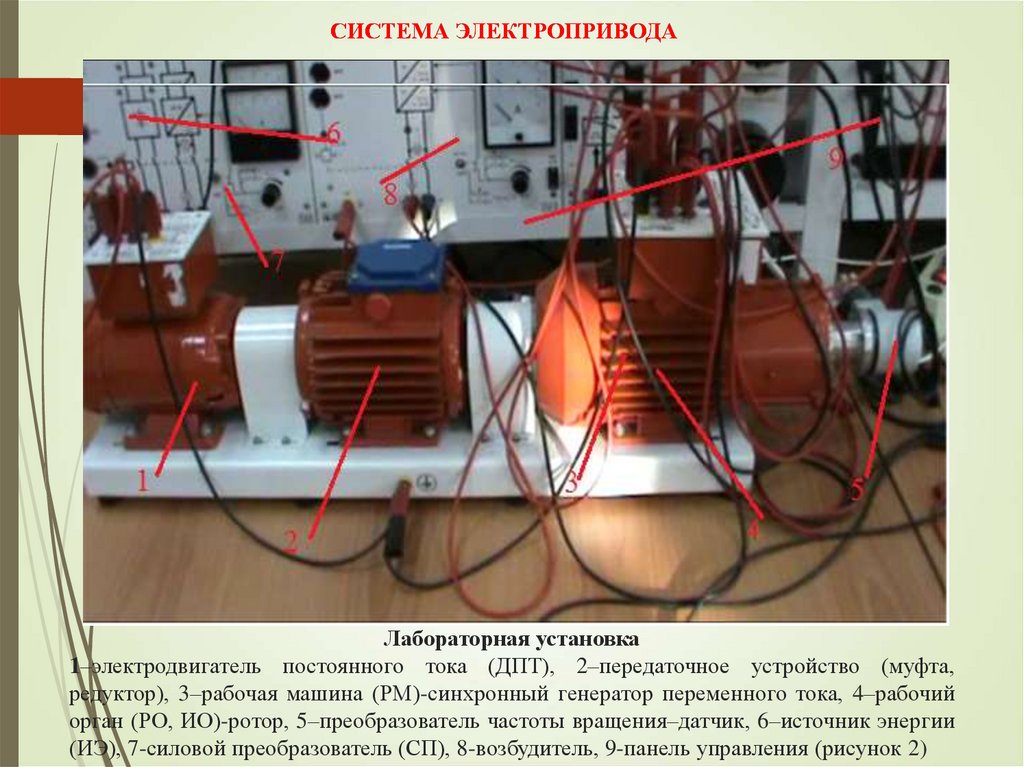
СИСТЕМА ЭЛЕКТРОПРИВОДАЛабораторная установка
1–электродвигатель постоянного тока (ДПТ), 2–передаточное устройство (муфта,
редуктор), 3–рабочая машина (РМ)-синхронный генератор переменного тока, 4–рабочий
орган (РО, ИО)-ротор, 5–преобразователь частоты вращения–датчик, 6–источник энергии
(ИЭ), 7-силовой преобразователь (СП), 8-возбудитель, 9-панель управления (рисунок 2)
5.
Рисунок 3Система управления ЭП является его составной частью. В соответствии со структурной схемой ЭП,
представленной на рис. 3, и определением ГОСТа в состав ЭП 6 входит электрический двигатель 1,
который вырабатывает механическую энергию МЭ за счет потребляемой от источника 3 электрической
энергии ЭЭ. Параметры и объемы поступающей на двигатель энергии регулируются силовым
преобразователем электроэнергии 2, за счет чего обеспечивается управление двигателем.
6.
ЭЛЕМЕНТЫ СИСТЕМЫ ЭЛЕКТРОПРИВОДАСигнал
управления
Uy
силовым
преобразователем
вырабатывается устройством управления 4, в состав которого в
общем случае входят устройства получения, преобразования,
хранения, распределения и выдачи информации, блоки
сопряжения, регуляторы переменных (координат), различные
функциональные
блоки
управления
и
т.д.
Устройство
управления 4 и преобразователь 2 образуют систему
управления электропривода 5. 9-передаточное устройство.
Устройство управления 4 вырабатывает сигнал управления Uy с
помощью сигнала задания (уставки) U„ задающего характер
движения исполнительного органа 7 рабочей машины 8, и ряда
дополнительных сигналов 1/дл, дающих информацию о
реализации технологического процесса рабочей машины,
характере движения исполнительного органа, работе отдельных
элементов ЭП, возникновении аварийных ситуаций и т.д. Эти
сигналы поступают на устройство управления от различных
датчиков.
7.
Классификация электроприводовСогласно ГОСТ ЭП классифицируются по следующим
признакам [5]:
1. По количеству и связи рабочих (исполнительных) органов: а)
индивидуальный. б) групповой, в)взаимосвязанный, г)
многодвигательный.
2. По типу управления и задаче управления: а)
автоматизированный ЭП, б) программно-управляемый ЭП,
в)следящий ЭП, г) позиционный ЭП, д) адаптивный ЭП.
3. По характеру движения: а)вращательный ЭП, б) линейный ЭП,
в) дискретный ЭП.
4. По наличию и характеру передаточного устройства: а)
редукторный ЭП, б) электрогидравлический с гидравлическим
ПУ, в) магнитогидродинамический ЭП.
5. По роду тока: а) переменного тока, б) постоянного тока.
6. По важности выполняемых операций: а) главный ЭП, б)
вспомогательный ЭП.
8.
ВЫБОР ЭД. РЕЖИМЫ РАБОТЫ ЭД. ВЫБОР МОЩНОСТИВыбор ЭД. Режимы работы ЭД. Выбор мощности
Выбор ЭД является ответственным этапом в проектировании ЭП. От
правильного выбора ЭД зависит не только экономичность ЭП, но и
экономичность и надежность технологической установки (технологического
процесса, рабочего механизма). Выбор ЭД предусматривает: 1) выбор рода
тока и номинального напряжения, с учетом, что асинхронные двигатели
являются самыми простыми, надежными; двигатели постоянного тока –
самыми дорогими и сложными в эксплуатации; 2) выбор номинальной
частоты вращения; 3) выбор конструктивного исполнения ЭД с учетом: а)
защиты его от воздействия окружающей среды, б) способа охлаждения, в)
способа монтажа и эксплуатации.
Режимы работы ЭД.
Режимы работы ЭП стандартизованы. Режим работы ЭД определяет
характер изменения нагрузки.
Режим работы ЭП (ЭД) – это определенный порядок чередования
периодов, характеризуемых величиной и продолжительностью нагрузки,
отключений, торможения, пуска и реверса за время работы.
Для учета изменения нагрузки рассчитывают и строят нагрузочные
диаграммы, которые являются зависимостью мощности, тока или
вращающего момента двигателя от времени.
9.
РЕЖИМЫ РАБОТЫ ЭД.Различают
следующие
основные
режимы
работы
ЭД:
продолжительный
(S1),
кратковременный
(S2) и
повторнократковременный (S3). Продолжительный режим работы ЭД может
быть
при
постоянной
(вентиляторы,
центробежные
насосы,
транспортеры) или переменной (ЭП металлорежущих станков)
нагрузках. При постоянной нагрузке температура нагрева ЭД
постепенно достигает установившегося значения, при котором
t4
двигатель может работать долгое
время.
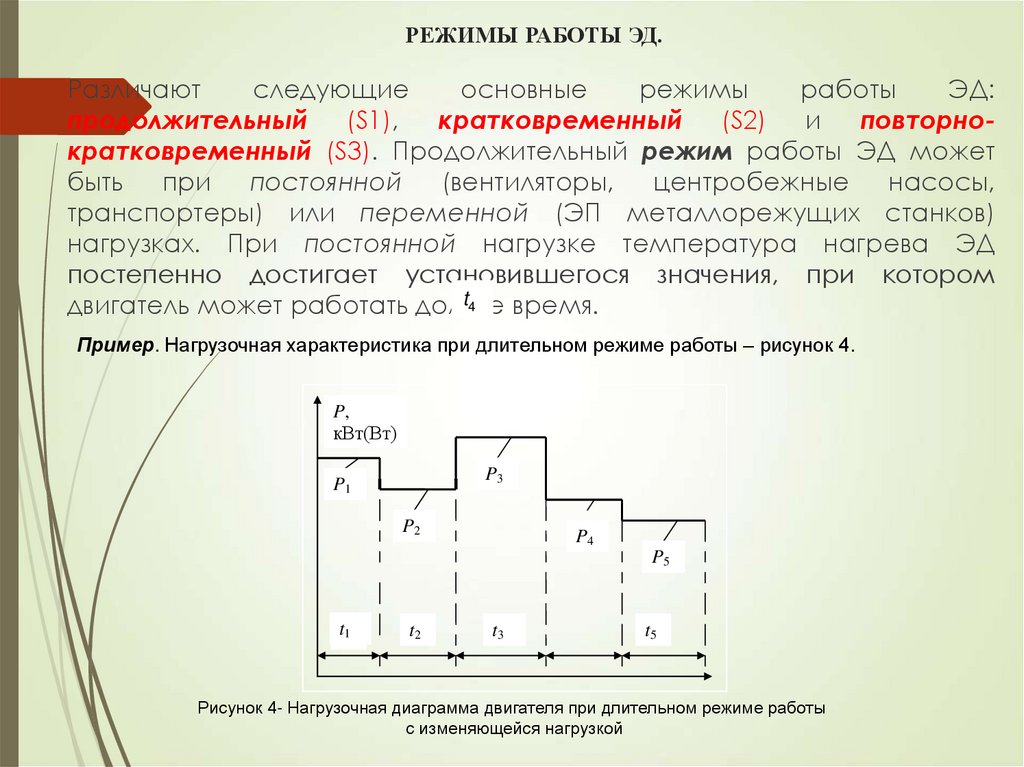
Пример. Нагрузочная характеристика при длительном режиме работы – рисунок 4.
P,
кВт(Вт)
P3
P1
P2
P4
P5
t1
t2
t3
t5
Рисунок 4- Нагрузочная диаграмма двигателя при длительном режиме работы
с изменяющейся нагрузкой
10.
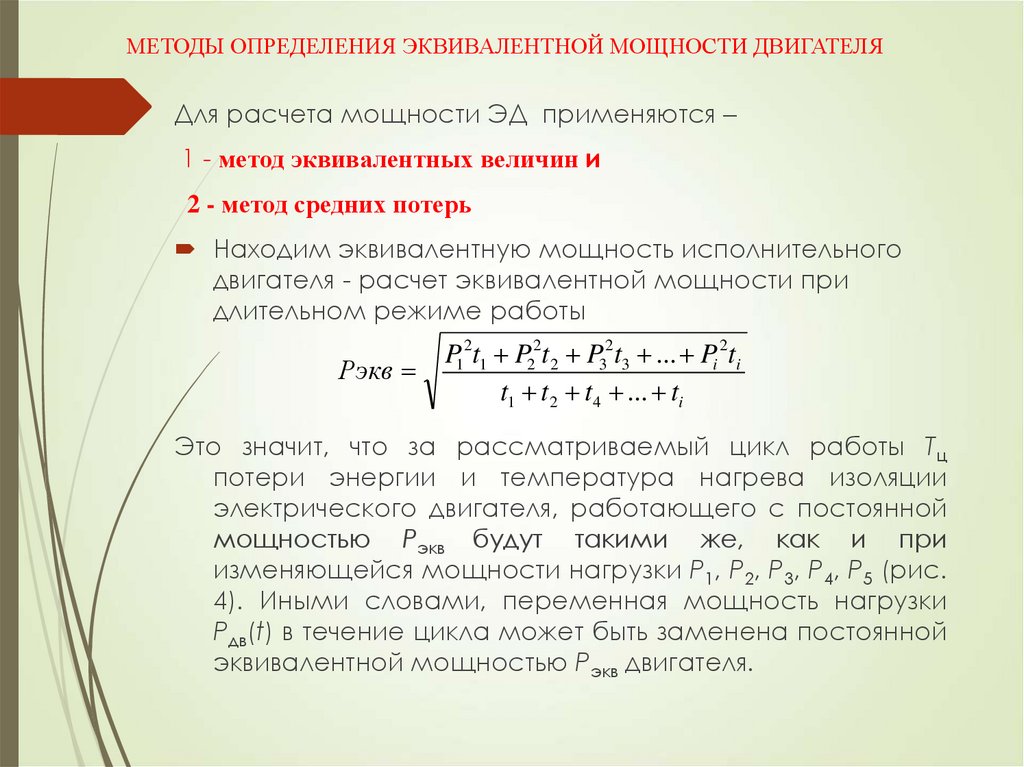
МЕТОДЫ ОПРЕДЕЛЕНИЯ ЭКВИВАЛЕНТНОЙ МОЩНОСТИ ДВИГАТЕЛЯДля расчета мощности ЭД применяются –
1 - метод эквивалентных величин и
2 - метод средних потерь
Находим эквивалентную мощность исполнительного
двигателя - расчет эквивалентной мощности при
длительном режиме работы
Pэкв
P12t1 P22t2 P32t3 ... Pi 2ti
t1 t2 t4 ... ti
Это значит, что за рассматриваемый цикл работы Тц
потери энергии и температура нагрева изоляции
электрического двигателя, работающего с постоянной
мощностью Рэкв будут такими же, как и при
изменяющейся мощности нагрузки Р1, Р2, Р3, Р4, P5 (рис.
4). Иными словами, переменная мощность нагрузки
Pдв(t) в течение цикла может быть заменена постоянной
эквивалентной мощностью Рэкв двигателя.
11.
ЭКВИВАЛЕНТНАЯ МОЩНОСТЬ ПРИ ПОВТОРНО-КРАТКОВРЕМЕННОМ РЕЖИМЕРисунок 5
Поскольку в отдельные интервалы времени цикла работы мощность нагрузки снижается до
Pдв(t) = 0 (участки диаграммы t2 и t4), то это повторно-кратковременный режим.
Если на данных интервалах (Pдв(t) = 0) двигатель не отключается от сети, а продолжает работать
в режиме холостого хода, то подрежим работы − повторно-кратковременный S3. Поскольку во время
паузы двигатель продолжает охлаждаться за счет своих конструктивных элементов.
12.
ЭКВИВАЛЕНТНУЮ МОЩНОСТЬ ДЛЯ ПОВТОРНО-КРАТКОВРЕМЕННОГО РЕЖИМА1.Найти Рэкв (рисунок 5) по формуле
Pэкв
P12t1 P22t2 P32t3 ... Pi 2ti
t1 t2 t4 ... ti
2. Определить расчетное значение продолжительности включения
ПВ = (tp/tц) 100 ,
где tц = tр + tп = продолжительность цикла, tр – продолжительность
работы, tп = паузы.
Так как ЭД выпускаются только для номинальных значений ПВ, выбрать
ближайшее номинальное значение ПВном.
3. Определить расчетную мощность из соотношения
Ррасч = Рэкв ( ПВ / ПВном).
4. По справочной литературе из условия Рном Ррасч выбрать ближайший
типоразмер двигателя.
5. Проверить выбранный ЭД на перегрузочную способность. Определить
максимальную мощность по формуле
Рмах = 2 Рном.
6. Определить максимальную мощность нагрузки Рмах.нагр = Р1 (рисунок
4). ЭД способен работать с перегрузкой при условии
Рмах Рмах.нагр.
При невыполнении условия работы с максимальной нагрузкой следует
выбрать следующий по мощности типоразмер ЭД. Выполнение условия
подтверждает правильность построения нагрузочной диаграммы.