
 informatics
informaticsSimilar presentations:










Платформа автономной сборки метеорологической ракеты
1.
"Платформа автономнойсборки метеорологической
ракеты"
Участники: Русанов Никита Романович, Коковин Владислав
Дмитриевич, Шмарин Максим Владиславович.
Площадка: Хабаровский край г.Комсомольск-на-Амуре КНАГУ
Наставник: Егор Трегубов Александрович
2.
Идея роботыВ современном мире стремительно развивается отрасль покорения космоса, исследуются
далекие планеты, звезды, ведется поиск внеземной жизни. Но главной областью интереса людей
в данной сфере выступает возможность выйти за границы Земли и отправится к новым
безжизненным планетам. Данная мечта не может быть в полной мере осуществлена без больших
исследований и поисков пригодных кандидатов на заселение, поэтому первыми за границу
стратосферы выходят различные ракеты, спутники и телескопы. Все большее распространение
получают различные планетоходы и даже планетарные вертолеты. Как нам кажется, мощностей
того оборудования, что достигает нужной орбиты или поверхности недостаточно для
полноценного исследования далеких земель и отдаляет мечту о возможности безопасных
межпланетных перелетов. Поэтому необходимы более мощные и тяжелые устройства, способные
вести дистанционное наблюдение за обстановкой и отправлять как можно больше данных сквозь
миллионы километров. В этом могут помочь различные исследовательские метеорологические
ракеты и зонды, но увы, их доставка затруднена из за формы, веса и габаритов. Поэтому наша
идея заключается в создании автономной сборочной платформы для метеорологических ракет,
способной собрать и запустить ракету прямо с поверхности другой планеты, в нашем случае с
Марса, как ближайшего кандидата на первый межпланетный перелет. Это позволит вывести
ракету на более правильную орбиту и усовершенствовать ее, так как доставка будет намного
облегчена, а это в свою очередь организует обширный исследовательский потенциал для
астрофизиков и других астрологов.
3.
Подходы и методыВ нашем проекте будут использоваться аддитивные технологии 3D
печати для построения несущих и подвижных частей каркаса
прототипа; шаговые двигатели для перемещения сборочных частей
ракеты до пункта сборки; механизированные захваты для
осуществления процесса стыковки отдельных частей.
4.
Задачи проекта1) Прием доставленных частей ракеты на сборочное основание.
2) Обеспечение поэтапной безопасной для конструкции сборки.
3) Обеспечение запасания электроэнергии посредством
солнечных панелей.
5.
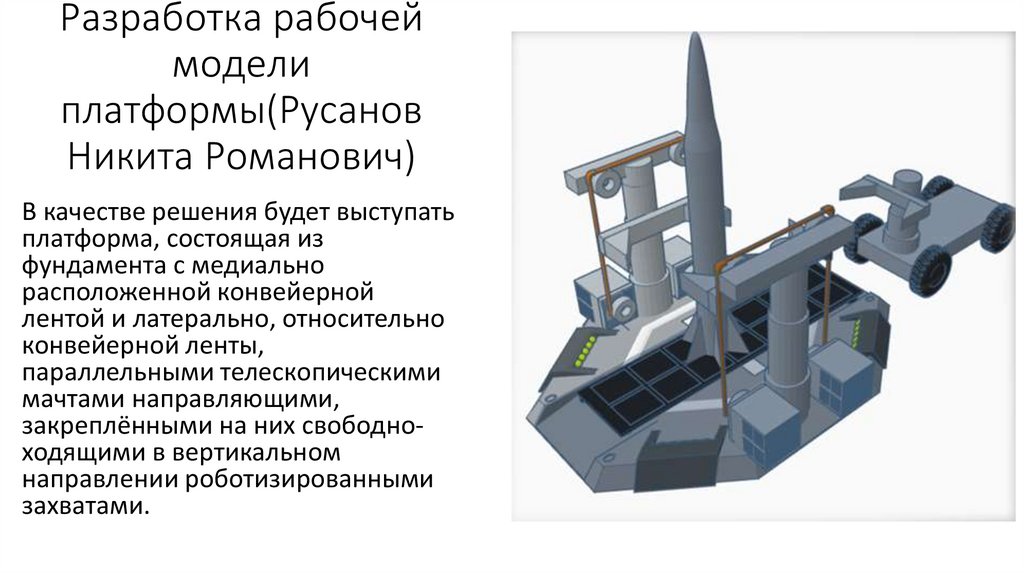
Разработка рабочеймодели
платформы(Русанов
Никита Романович)
В качестве решения будет выступать
платформа, состоящая из
фундамента с медиально
расположенной конвейерной
лентой и латерально, относительно
конвейерной ленты,
параллельными телескопическими
мачтами направляющими,
закреплёнными на них свободноходящими в вертикальном
направлении роботизированными
захватами.
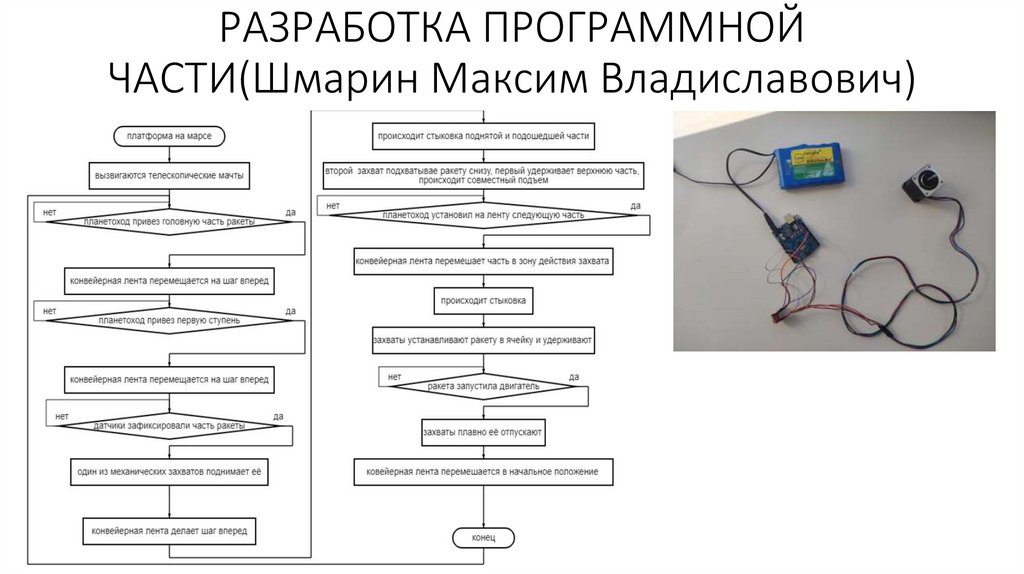
6.
РАЗРАБОТКА ПРОГРАММНОЙЧАСТИ(Шмарин Максим Владиславович)
7.
Разработка подвижной составляющей(альфа-Коковин Владислав Дмитриевич)
В качестве решения будут выступать:
1. система выдвижения телескопических
направляющих, основанная на
компрессионном давлении и фиксации за
счёт пружинных зацепов
2. система движения платформ с
закреплёнными захватами за счёт
алгоритмизированной работы шаговых
двигателей, взаимодействующих за счёт
блочной передачи и троса
3. система движения конвейерной ленты за
счёт шагового двигателя и ременной
передачи
8.
ПерспективыПлатформа может стать платсдармом для дальнейших
исследований в области астрологии и изучения других планет. Она
позволит увеличить количество межпланетных миссий и облегчить
нагрузки на ракеты носители, запускаемые с Земли, как и убрать
необходимость запускать непосредственно с нашей планеты
готовые метеорологические ракеты.