













 electronics
electronicsSimilar presentations:





")



 Часть 3")
Зондирующий сигнал и его характеристики. Лекция №3. Часть 1. Теоретические основы радиолокации
1.
Военно-инженерный институтУчебный военный центр
Отдел «Радиолокационного вооружения РТВ
ВВС»
Дисциплина
«ОСНОВЫ ТЕОРИИ РАДИОЛОКАЦИОННЫХ
СИСТЕМ И КОМПЛЕКСОВ»
Часть 1. Теоретические основы
радиолокации
Зондирующий сигнал и его
характеристики
2.
1дать характеристику зондирующим сигналам РЛС,
раскрыв содержание их классификации, формального
описания и параметров, по которым сигналы
сравниваются и выбираются.
3.
21. Виды и математические модели
зондирующих сигналов.
2. Основные характеристики
зондирующих сигналов.
3. Сложные энергоёмкие сигналы.
4.
3с.37-43, 59-60;
5.
46.
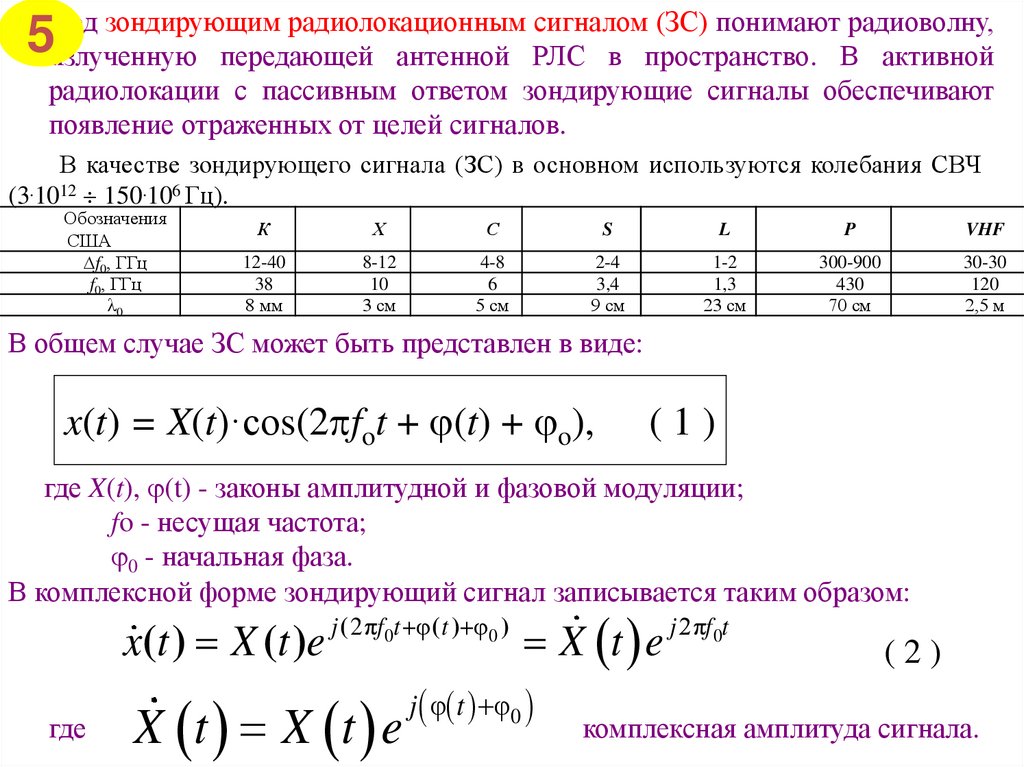
Под зондирующим радиолокационным сигналом (ЗС) понимают радиоволну,излученную передающей антенной РЛС в пространство. В активной
радиолокации с пассивным ответом зондирующие сигналы обеспечивают
появление отраженных от целей сигналов.
5
В качестве зондирующего сигнала (ЗС) в основном используются колебания СВЧ
(3.1012 150.106 Гц).
Обозначения
США
f0, ГГц
f0, ГГц
λ0
К
Х
С
S
L
P
VHF
12-40
38
8 мм
8-12
10
3 см
4-8
6
5 см
2-4
3,4
9 см
1-2
1,3
23 см
300-900
430
70 см
30-30
120
2,5 м
В общем случае ЗС может быть представлен в виде:
x(t) = X(t)·cоs(2 fot + (t) + o),
(1)
где X(t), (t) - законы амплитудной и фазовой модуляции;
fo - несущая частота;
0 - начальная фаза.
В комплексной форме зондирующий сигнал записывается таким образом:
x(t ) X (t )e
где
X
x tt ee
(2)
j φ t φ 0
комплексная амплитуда сигнала.
j ( 2π
2 f 0f 0t t φ ((tt)) φ 00 ))
X t X t e
j 2j 2π
ff00tt
7.
6 Физически существующий сигнал (1) является реальной частьюкомплексного сигнала (2), т.е.
x t Re x t
Геометрической интерпретацией ЗС в форме (2) является вектор
длиной X(t), вращающийся против часовой стрелки с угловой
скоростью
= 0 + (t),
где 0 = 2 fo; (t)- закон частотной модуляции, определяемый
d (t )
выражением
(t )
J m x (t )
dt
.
0t+ (t)+ o
0
Re x(t )
8.
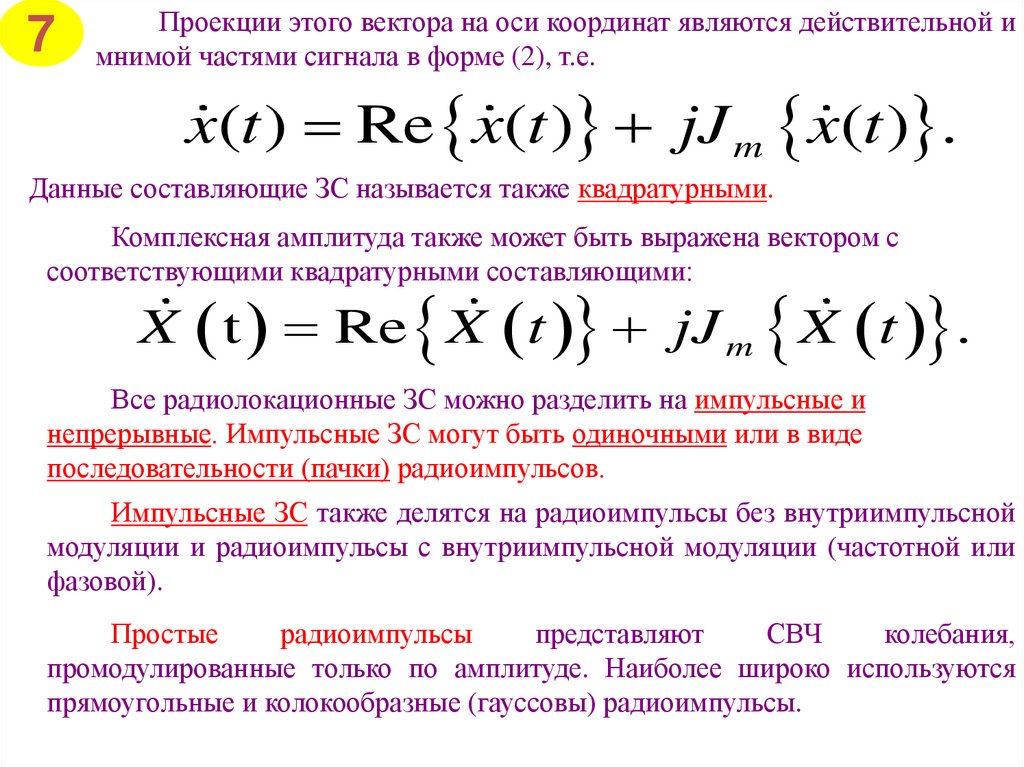
7Проекции этого вектора на оси координат являются действительной и
мнимой частями сигнала в форме (2), т.е.
x(t ) Re x(t ) jJ m x(t ) .
Данные составляющие ЗС называется также квадратурными.
Комплексная амплитуда также может быть выражена вектором с
соответствующими квадратурными составляющими:
X t Re X t jJ m X t .
Все радиолокационные ЗС можно разделить на импульсные и
непрерывные. Импульсные ЗС могут быть одиночными или в виде
последовательности (пачки) радиоимпульсов.
Импульсные ЗС также делятся на радиоимпульсы без внутриимпульсной
модуляции и радиоимпульсы с внутриимпульсной модуляции (частотной или
фазовой).
Простые
радиоимпульсы
представляют
СВЧ
колебания,
промодулированные только по амплитуде. Наиболее широко используются
прямоугольные и колокообразные (гауссовы) радиоимпульсы.
9.
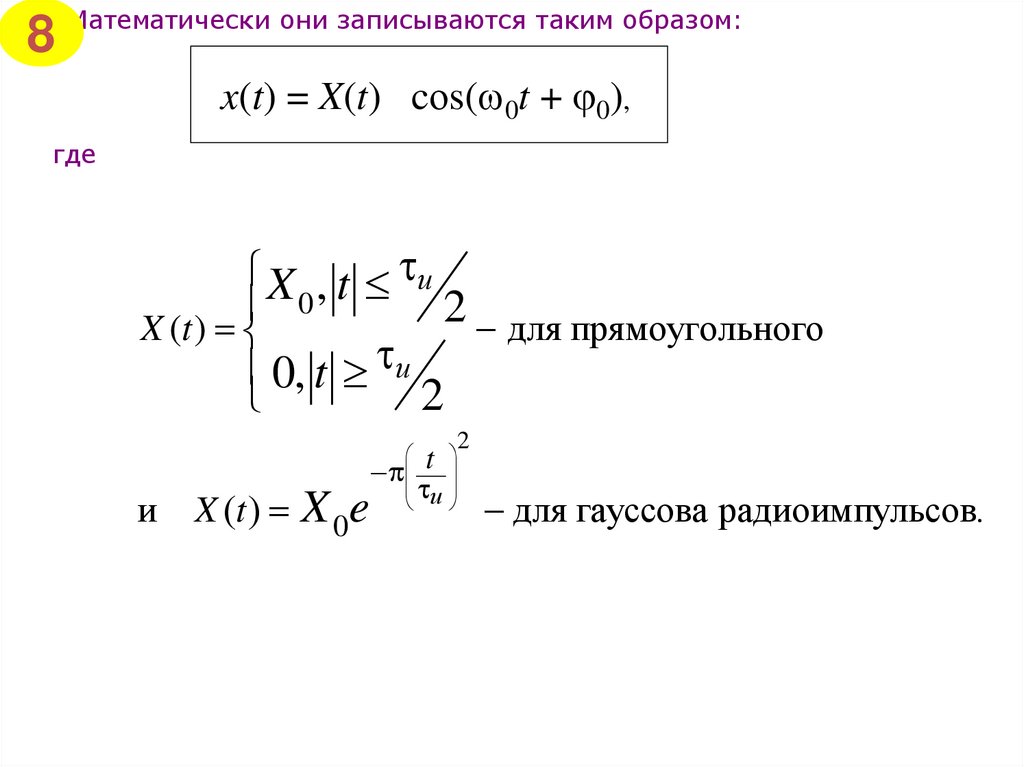
8Математически они записываются таким образом:
x(t) = X(t) cоs( 0t + 0),
где
X , t и
0
2 для прямоугольного
X (t )
0, t и
2
и
X (t ) X 0e
t
и
2
для гауссова радиоимпульсов.
10.
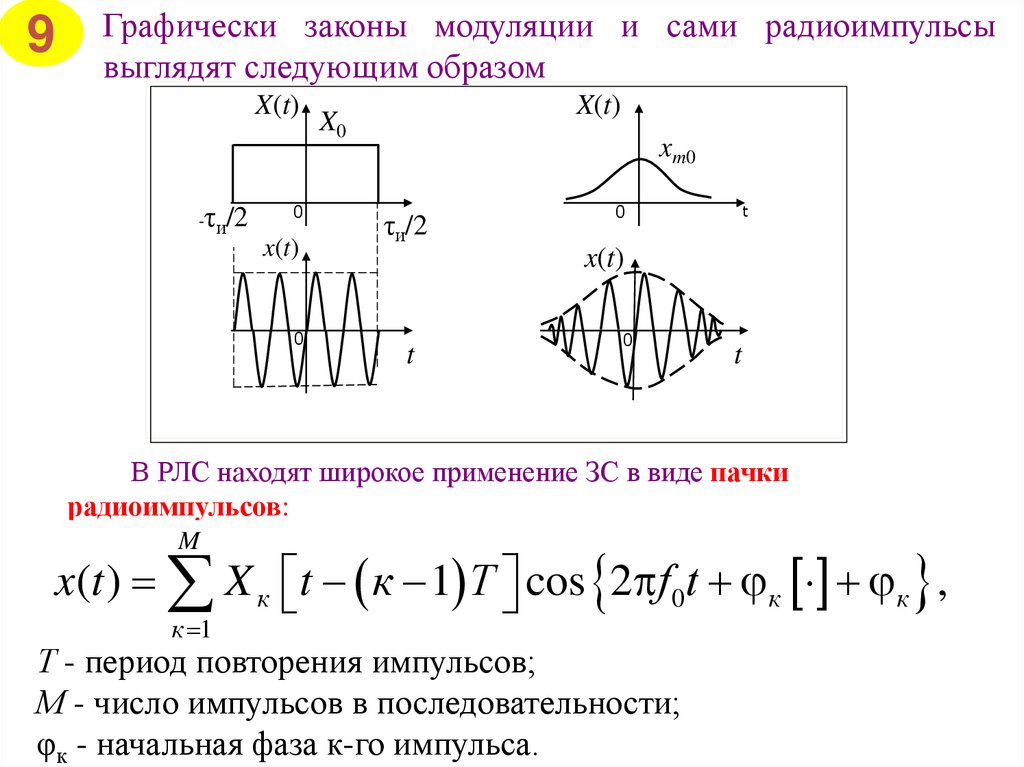
9Графически законы модуляции и сами радиоимпульсы
выглядят следующим образом
X(t)
τ /2
- и
0
x(t)
0
X(t)
X0
xm0
τи/2
0
t
x(t)
t
0
t
В РЛС находят широкое применение ЗС в виде пачки
радиоимпульсов:
M
x(t ) X к t к 1 Т cos 2 f 0t к к ,
к 1
Т - период повторения импульсов;
М - число импульсов в последовательности;
φк - начальная фаза к-го импульса.
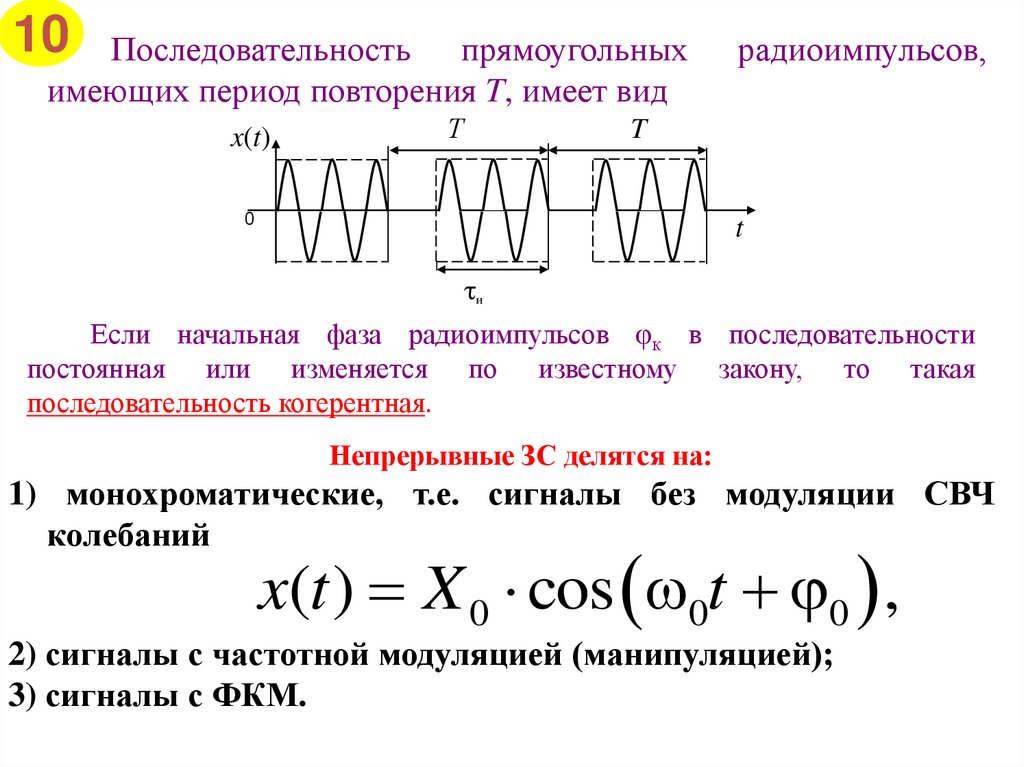
11.
10Последовательность прямоугольных
имеющих период повторения T, имеет вид
x(t)
Т
радиоимпульсов,
T
0
t
и
Если начальная фаза радиоимпульсов φк в последовательности
постоянная или изменяется по известному закону, то такая
последовательность когерентная.
Непрерывные ЗС делятся на:
1) монохроматические, т.е. сигналы без модуляции СВЧ
колебаний
x(t ) X 0 cos 0t 0 ,
2) сигналы с частотной модуляцией (манипуляцией);
3) сигналы с ФКМ.
12.
111.Таким образом, для решения задач РЛ применяются
различные виды ЗС: импульсные, непрерывные, с
внутриимпульсной модуляцией и без таковой, одиночные и
пачечные.
2.Конкретный вид используемого сигнала определяется
требованиями к качеству решения задач РЛ и,
соответственно, требованиями к характеристикам РЛС.
13.
1214.
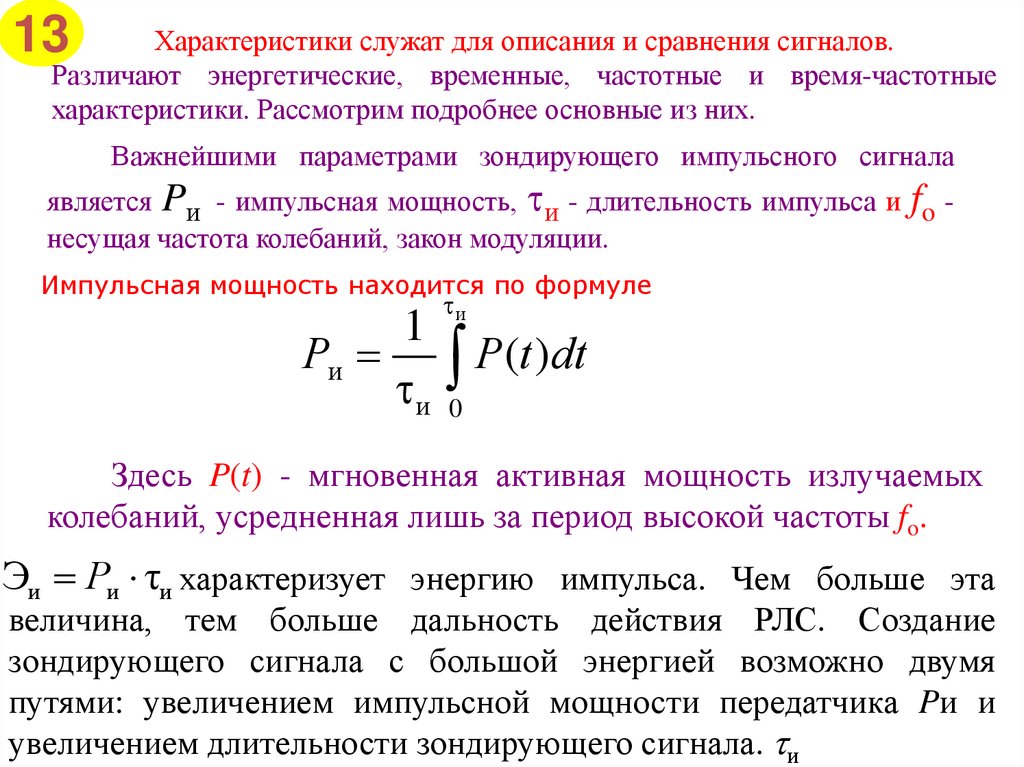
13Характеристики служат для описания и сравнения сигналов.
Различают энергетические, временные, частотные и время-частотные
характеристики. Рассмотрим подробнее основные из них.
Важнейшими параметрами зондирующего импульсного сигнала
является Pи - импульсная мощность, и - длительность импульса и fo несущая частота колебаний, закон модуляции.
Импульсная мощность находится по формуле
и
1
Ри Р(t )dt
и 0
Здесь P(t) - мгновенная активная мощность излучаемых
колебаний, усредненная лишь за период высокой частоты fo.
Эи Ри τи характеризует энергию импульса. Чем больше эта
величина, тем больше дальность действия РЛС. Создание
зондирующего сигнала с большой энергией возможно двумя
путями: увеличением импульсной мощности передатчика Pи и
увеличением длительности зондирующего сигнала. и
15.
14Последовательности радиоимпульсов
характеризуют средней мощностью:
и
непрерывные
сигналы
Ри и Ри
Рср
Т
Q
где Q = T/ τи. - скважность; - для последовательности импульсов
T
1
Рср lim P (t )dt
T T
0
- для непрерывного во времени сигнала.
Несущая частота fo может быть различной в зависимости от рабочего
диапазона волн РЛС. Вся радиолокационная техника основана на использовании
радиоволн УКВ диапазона, имеющих длину меньше 10 метров.
Важной частотной характеристикой сигналов является их спектр.
Зондирующий сигнал и его спектр связаны между собой парой
преобразований Фурье: прямым, в соответствии с которым
осуществляется переход от временного представления к
частотному
q( f ) x(t )e j 2 ft dt ,
(3)
х(t ) q ( f )e
j 2 ft
df .(4)
16.
15Аналогичная связь существует между законом модуляции
и его спектром
G ( f ) X (t )t
j 2 ft
dt ,
X (t ) G ( f )e
j 2 ft
df .
Спектр сигнала представляют в виде АЧС и ФЧС:
g( f ) g( f ) e
где |g( f )| - АЧС сигнала;
arg g( f ) - ФЧС сигнала.
j arg g ( f )
,
17.
16 АЧС типовых простых сигналов выглядят следующим образомġ( f )
прямоугольного
радиоимпульса
ġ(f)
пачки
радиоимпульсов
1/МТ
1/Т
f0 -1/ и
f0
f0 +1/ и
f
f0 -1/ и
f0
f0 +1/ и
Область частот, в пределах которой сосредоточена
основная часть всей энергии сигнала, называется
шириной спектра Δfc. Обычно ширина спектра
определяется полосой частот, где сосредоточено
~90% энергии сигнала. Например, ширина спектра
прямоугольного радиоимпульса и их пачки равна Δfc
= 1/ и.
18.
17Автокорреляционная функция (АКФ).
АКФ характеризует взаимосвязь между двумя значениями
зондирующего сигнала, разнесенными по времени на
интервал τ. Она определяется выражением
rx ( ) x(t ) x (t )dt
АКФ закона модуляции ЗС может быть определена
Rx X (t ) X (t )dt
19.
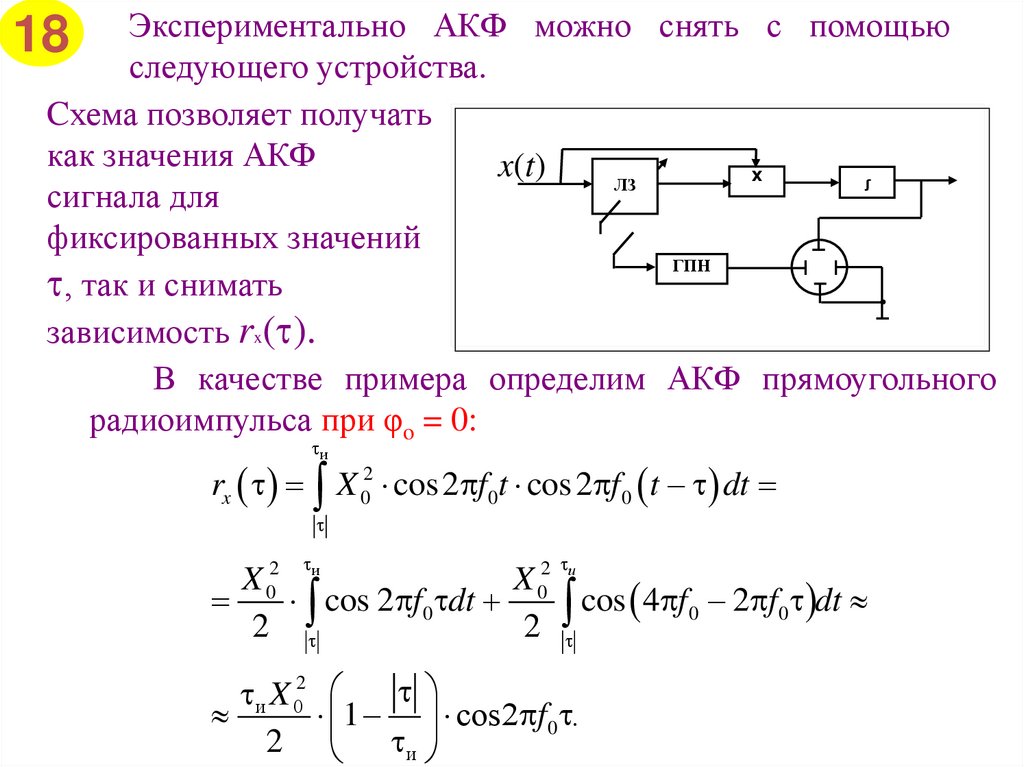
Экспериментально АКФ можно снять с помощьюследующего устройства.
Cхема позволяет получать
как значения АКФ
x(t)
ЛЗ
сигнала для
фиксированных значений
ГПН
, так и снимать
зависимость rx( ).
В качестве примера определим АКФ прямоугольного
радиоимпульса при φo = 0:
18
X
∫
и
rx X 02 cos 2 f 0t cos 2 f 0 t dt
X 02 и
X 02 и
cos 2 f 0 dt
cos 4 f 0 2 f 0 dt
2
2
и X 02
1 соs2 f 0 .
2 и
20.
19АКФ закона модуляции равна
и X
Rx ( )
. 1 .
2 и
rx(τ)
Rx(τ)
2
0
Изобразим полученные
АКФ
-τи
Rx(τ)
τи
0
rx(τ)
τ
По мере увеличения происходит уменьшение значений,
принимаемых АКФ. Значение = к при котором
выполняются условия
rx ( ) E
Rx ( ) E ,
где E достаточно малое число, а к
называется временем корреляции.
Обычно E берут равным 0,1 от
максимального значения АКФ.
rx(τ)
E
τк
0
τ
21.
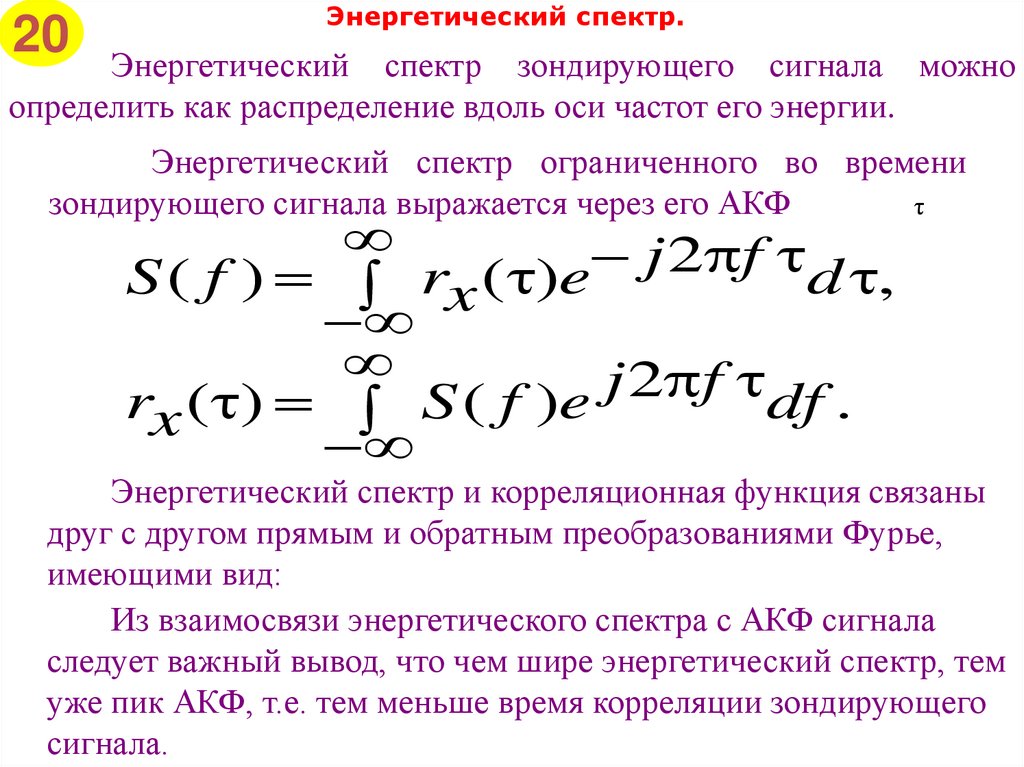
20Энергетический спектр.
Энергетический спектр зондирующего сигнала можно
определить как распределение вдоль оси частот его энергии.
Энергетический спектр ограниченного во времени
зондирующего сигнала выражается через его АКФ
τ
j
2
f
S ( f ) rx ( )e
d ,
j
2
f
rx ( ) S ( f )e
df .
Энергетический спектр и корреляционная функция связаны
друг с другом прямым и обратным преобразованиями Фурье,
имеющими вид:
Из взаимосвязи энергетического спектра с АКФ сигнала
следует важный вывод, что чем шире энергетический спектр, тем
уже пик АКФ, т.е. тем меньше время корреляции зондирующего
сигнала.
22.
211.
Таким
образом,
к
основным
характеристикам
зондирующих
сигналов
относятся:
закон
модуляции,
длительность, мощность и энергия, АКФ, время корреляции,
энергетический спектр, ширина спектра, которые и определяют
ТТХ РЛС.
2. Эти характеристики различны для конкретных видов ЗС и
во многом будут определять структуру устройств обработки
радиолокационных сигналов.
23.
2224.
23В настоящее время в радиолокации широко используются два вида
сложных сигналов: линейно-частотно-модулированные (ЛЧМ сигналы) и
фазо-кодо-манипулированные (ФКМ сигналы).
Радиоимпульсы с внутриимпульсной частотной модуляцией
(манипуляцией).
В таких сигналах частота в пределах длительности импульса изменяется по
определенному закону: линейному (ЛЧМ), параболическому и т.д. Для ЛЧМ
радиоимпульсов закон частотной модуляции описывается выражением:
t 0 где Δf - девиация
f
f (t ) f 0
t;
частоты.
и
t и
Ему соответствует квадратичный закон изменения фазы
φ(t)=2 fоt + bt2 + φо,
где b - параметр
модуляции,равный
фазовой
f
b
.
и
25.
Комплексная амплитуда ЛЧМ радиоимпульса описываетсявыражением
24
X0 e
X (t )
0
j bt 2 0
f(t)
0 t и
t 0,
t и
x(t)
f0+ f
f
и
0
f0
0
и
t
АЧС ЛЧМ сигнала имеет вид
ġ(f)
f0
Δfс=Δf
f
.
26.
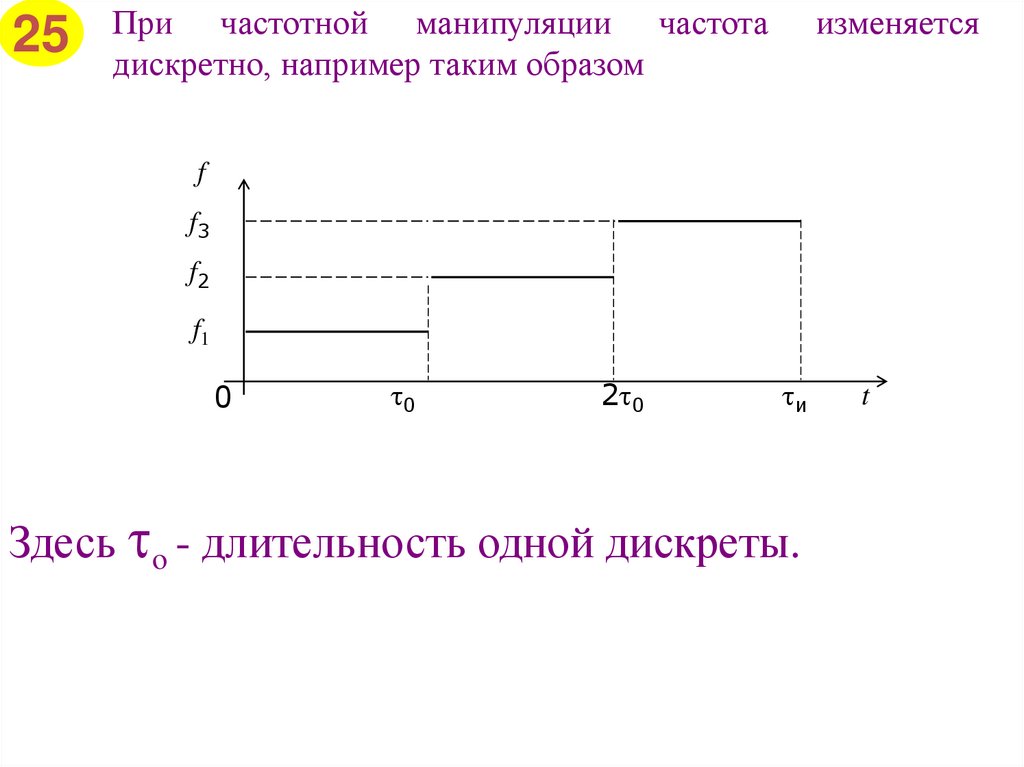
25При частотной манипуляции частота
дискретно, например таким образом
изменяется
f
f3
f2
f1
0
0
2 0
и
Здесь o - длительность одной дискреты.
t
27.
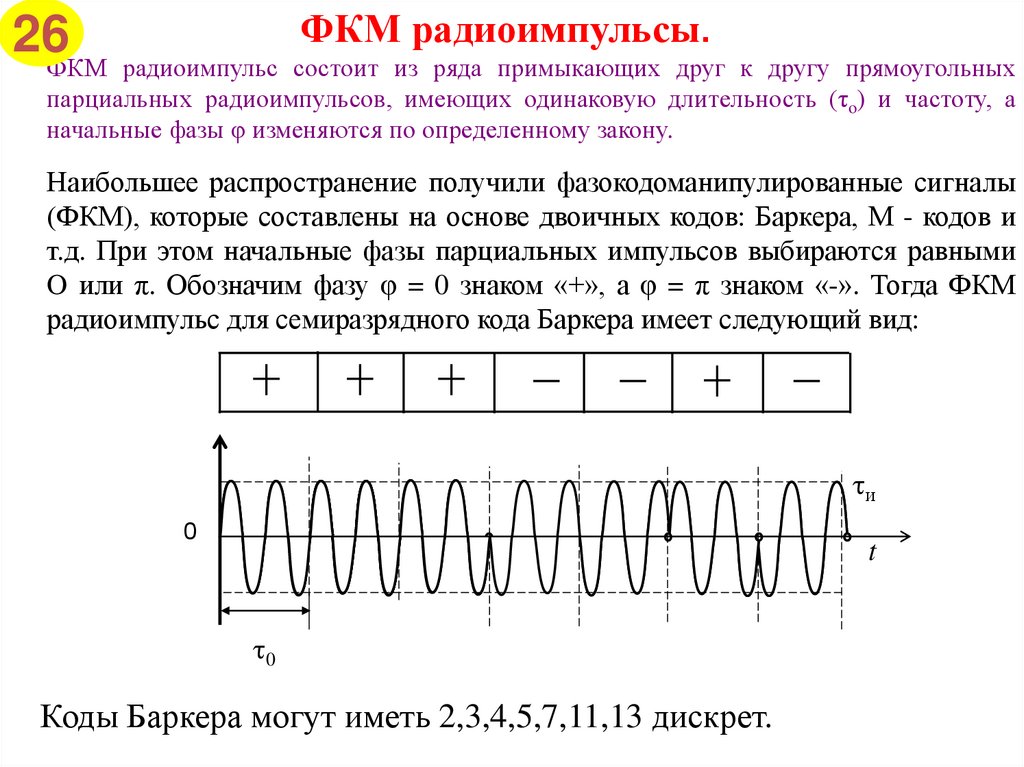
ФКМ радиоимпульсы.26ФКМ радиоимпульс состоит
из ряда примыкающих друг к другу прямоугольных
парциальных радиоимпульсов, имеющих одинаковую длительность (τo) и частоту, а
начальные фазы φ изменяются по определенному закону.
Наибольшее распространение получили фазокодоманипулированные сигналы
(ФКМ), которые составлены на основе двоичных кодов: Баркера, М - кодов и
т.д. При этом начальные фазы парциальных импульсов выбираются равными
O или π. Обозначим фазу φ = 0 знаком «+», а φ = π знаком «-». Тогда ФКМ
радиоимпульс для семиразрядного кода Баркера имеет следующий вид:
и
0
t
0
Коды Баркера могут иметь 2,3,4,5,7,11,13 дискрет.
28.
27АЧС ФКМ сигнала выглядит следующим образом
g(f)
ФКМ
радиоимпульса
Δfс=1/ о
f0
f
29.
28Таким образом, основными широкополосными
сигналами, применяемыми в РЛС, являются
ЛЧМ и ФКМ радиоимпульсы.
30.
291.
Для решения задач РЛ применяются различные виды ЗС:
импульсные, непрерывные, с внутриимпульсной модуляцией и
без таковой, одиночные и пачечные.
Конкретный вид используемого сигнала определяется
требованиями к качеству решения задач РЛ и, соответственно,
требованиями к характеристикам РЛС.
2. К основным характеристикам зондирующих сигналов
относятся: закон модуляции, длительность, мощность и энергия,
АКФ, время корреляции, энергетический спектр, ширина
спектра, которые и определяют ТТХ РЛС.
Эти характеристики различны для конкретных видов ЗС и во
многом будут определять структуру устройств обработки
радиолокационных сигналов.
3. Основными широкополосными сигналами, применяемыми в
РЛС являются ЛЧМ и ФКМ радиоимпульсы.
31.
30Отработать материал лекции в соответствии с
рекомендованной литературой:
Л 1/о, с.37-43, 59-60;
Л 2/д, с.20-54.
32.
Спасибо завнимание!
www.sfu-kras.ru
http://vii.institute.sfu-kras.ru