





 informatics
informaticsSimilar presentations:









")
Необычные способы управления роботом
1.
Р.Мухаммед2.
Управление роботом является сложной задачей.Определение, которое мы выбрали для «робота»,
требует, чтобы устройство получало данные о своей
среде. Затем принимало решение и предпринимало
соответствующие действия. Роботы могут быть
автономными и полуавтономными.
3.
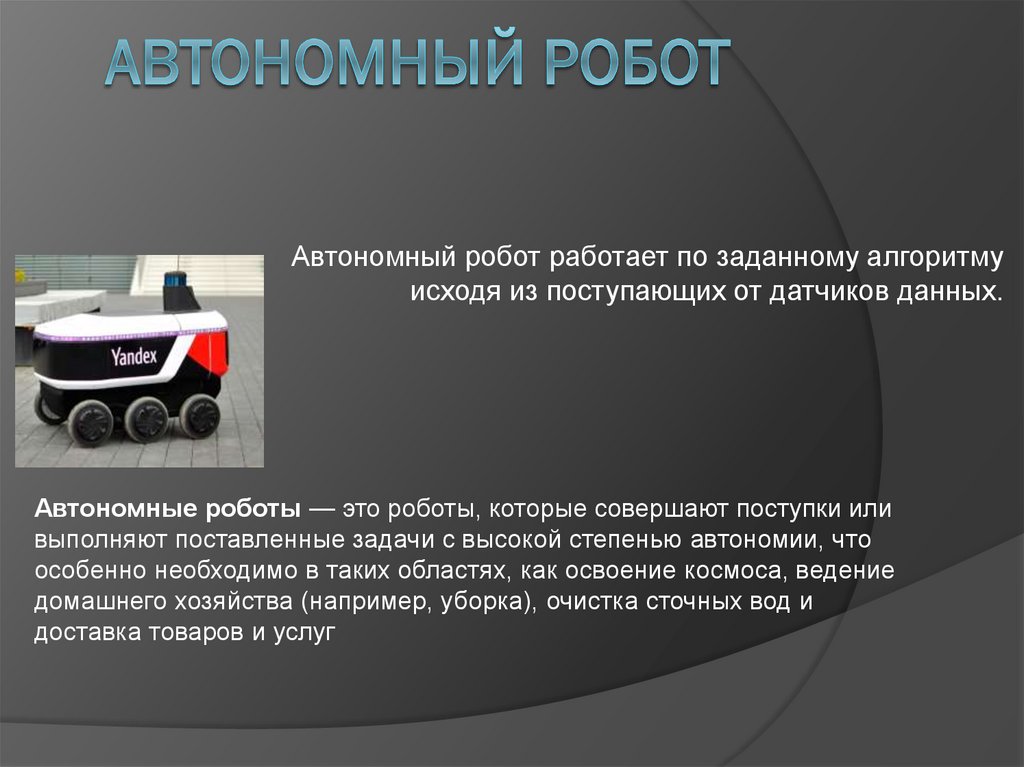
Автономный робот работает по заданному алгоритмуисходя из поступающих от датчиков данных.
Автономные роботы — это роботы, которые совершают поступки или
выполняют поставленные задачи с высокой степенью автономии, что
особенно необходимо в таких областях, как освоение космоса, ведение
домашнего хозяйства (например, уборка), очистка сточных вод и
доставка товаров и услуг
4.
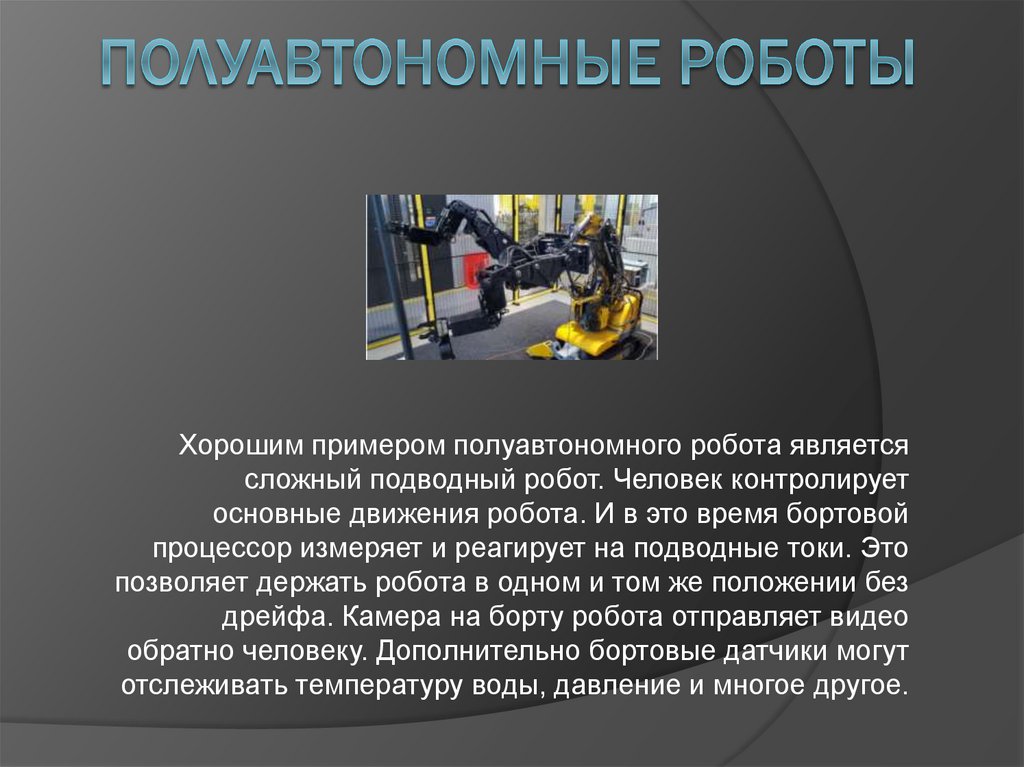
Хорошим примером полуавтономного робота являетсясложный подводный робот. Человек контролирует
основные движения робота. И в это время бортовой
процессор измеряет и реагирует на подводные токи. Это
позволяет держать робота в одном и том же положении без
дрейфа. Камера на борту робота отправляет видео
обратно человеку. Дополнительно бортовые датчики могут
отслеживать температуру воды, давление и многое другое.
5.
Существует не мало способов управления роботами,но вследующих слайдах , я вам расскажу про …
Управление по кабелю
Управление по Ethernet
Управление по Bluetooth
Управление по WiFi
Управление микроконтроллером Lego EV3
6.
Самый простой способ управления роботом — эторучной контроллер, физически подключенный к нему
с помощью кабеля. Переключатели, ручки, рычаги,
джойстики и кнопки на этом контроллере позволяют
пользователю управлять роботом без
необходимости включать сложную электронику.
7.
Используется разъём Ethernet RJ45. Дляуправления нужно Ethernet соединение. Робот
физически подключен к маршрутизатору.
Следовательно его можно контролировать через
Интернет. Также это возможно (хотя и не очень
практично) для мобильных роботов.
Преимуществами является то, что робота можно
контролировать через интернет из любой точки мира.
Робот не ограничен по времени работы, так как он может
использовать Power over Ethernet. PoE. Это технология,
которая позволяет передавать удалённому устройству
электрическую энергию вместе с данными через
стандартную витую пару по сети Ethernet.
8.
Bluetooth является радиосигналом (RF) и передается поопределенным протоколам для отправки и получения данных.
Обычный диапазон Bluetooth часто ограничен примерно 10 м.
Хотя он имеет то преимущество, что позволяет пользователям
управлять своим роботом через устройства с поддержкой
Bluetooth. Это в первую очередь сотовые телефоны, КПК и
ноутбуки (хотя для создания интерфейса может потребоваться
настраиваемое программирование). Так же, как и
радиоуправление, Bluetooth предлагает двустороннюю связь.
9.
Управление по WiFi часто является дополнительнойопцией для роботов. Способность управлять роботом
по беспроводной сети через Интернет представляет
некоторые существенные преимущества (и некоторые
недостатки) для беспроводного управления. Чтобы
настроить управление роботом по Wi-Fi нужен
беспроводной маршрутизатор, подключенный к
Интернету, и блок WiFi на самом роботе. Для робота
можно использовать устройство, которое поддерживает
TCP / IP протокол.
10.
Мы будем использовать микроконтроллер Lego EV3.Он нам позволяет сделать как полностью
автономную платформу. Так и полуавтономную,
управляемую по Bluetooth или при помощи
инфракрасного пульта управления.