













 industry
industrySimilar presentations:










Определение технических характеристик станка
1.
1 ОПРЕДЕЛЕНИЕ ТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК СТАНКАТаблица 2 – Основные параметры
Наименование
Одностоечный
(двухстоечный):
с горизонтальным
шпинделем (на каждой
стойке)
с траверсой и одним
вертикальным
шпинделем
с горизонтальным
(двумя) и вертикальным
(двумя) шпинделями
Двухстоечный:
с двумя
горизонтальными и
двумя вертикальными
шпинделями
комбинированный со
строгальными
суппортами
Модель
Скорости
шпинделя,
об/мин
40-2000
40-2000
25-1800
Мощно
сть, кВт
Вес,
кн
6303
6304
6305
Рабочая
поверхность
стола, мм
320х1000
400х1250
500х1600
4,5
4,5
7
34
40
63
6306
6308
630х2200
800х3000
47,5-600
25-800
10
14
180
245
6310
6641
6У316
6320
6325
1000х4000
1250х4000
1600х5000
2000х6300
2500х8000
25-800
25-1250
25-1250
20-1000
20-1000
14
20
20
28
28
315
380
490
635
980
6682
3600-12000
23,5-300
40
3140
6У632
3200-10000
23,5-300
40
3140
В качестве станка-прототипа выбираю ………………….
2.
2 РАЗРАБОТКА И ОПИСАНИЕ КОМПОНОВКИ СТАНКА3.
3 РАЗРАБОТКА И ОПИСАНИЕ КИНЕМАТИЧЕСКОЙСТРУКТУРЫ СТАНКА
4. «Типы передач и структура шестеренчатых коробок »
В зависимости от количества валов коробкибывают двухваловые и многоваловые.
i1=Z1/Z1'
i2=Z2/Z2'
i3=Z3/Z3'
(а)
(б)
Введем следующие обозначения:
m – число групп передач в коробке;
Pi – число передач в данной группе;
z – число ступеней скорости, создаваемых коробкой.
Для коробки, изображенной на рис. m=1; p=3; z=P=3.
5.
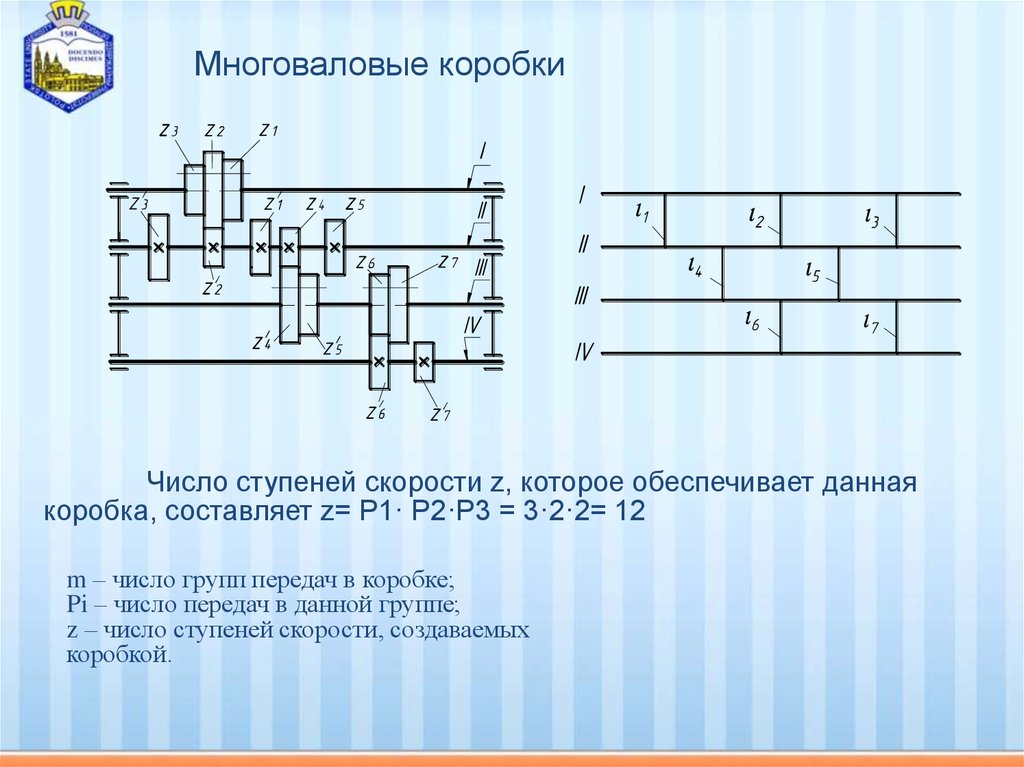
Многоваловые коробкиЧисло ступеней скорости z, которое обеспечивает данная
коробка, составляет z= Р1· Р2·Р3 = 3·2·2= 12
m – число групп передач в коробке;
Pi – число передач в данной группе;
z – число ступеней скорости, создаваемых
коробкой.
6.
Исходными данными для проектирования являются:- предельные значения частоты вращения шпинделя nmin = n1,
nmax = nz);
- знаменатель φ геометрического ряда частот вращения.
Требуется определить или выбрать:
- число ступеней скорости z коробки;
- число групп передач m;
- число передач в каждой группе Рi;
- порядок расположения групповых передач кинематической цепи от двигателя до шпинделя;
- порядок переключения групповых передач для получения последовательно всех значений частоты вращения шпинделя от от
n1 до nz;
- количество и расположение одиночных передач.
7.
Определение числа ступеней скорости и количествагрупп передач
lg Rn
Z
1
lg
где Rn – диапазон регулирования
nmax n z
Rn
nmin n1
Например nmin=100; nmax=1250, φ=1,26
Rn
1250
12,5
100
Z округляется в большую сторону.
Z
lg12,5
1 11,9 12
lg1, 26
8.
Выбираем стандартный ряд частот вращения:Значения нормализированных частот вращения главного привода для
=1,26
n от 10 до 4000 об/мин
10
12,5
250
315
16
20
25
400
500
630
31,5
800
40
50
63
80
100
125
160
1000
1250
1600
2000
2500
3150
4000
355
500
710
Значения нормализированных частот вращения главного привода для
200
=1,41
n от 11,2 до 4000 об/мин
11,2
1400
16
2000
22,4
2800
31,5
4000
45
63
90
125
180
250
1000
9.
Порядок расположения и последовательностьпереключения групповых передач в приводе
Коробка может быть выполнена в соответствии с одним из трех возможных
вариантов порядка расположения групповых передач:
Например Z=12
1. z = p1 p2 p3 = 3 2 2.
2. z = p1 p2 p3 = 2 3 2.
3. z = p1 p2 p3 = 2 2 3.
Z=3·2·2
Z= 2·3·2
p1 p2 … pm.
Z= 2·2·3
10.
В порядке переключения группа передач может быть:1. Основной (Р0) - она переключается в первую очередь.
2. Первая переборная (PI) – переключается во вторую очередь
3. Вторая переборная (PII) в третью очередь.
Кинематическая группа имеет свою характеристику х, которая:
- численно равна числу ступеней скоростей которые дает группе
предшествующая данной в порядке переключения;
- она показывает на сколько ступеней изменилась скорость для
переключения данной группы.
Характеристика основной группы Р0 всегда х = 1,
Характеристика PI - хI = Р0
Характеристика PII хII = Р1·Р0
11.
Формула структуры приводаВыражение вида
z = Р0(x0) Р1(x1)…Рm(xm),
задающее порядок расположения групп вдоль кинематической цепи и
порядок переключения групп для получения последовательно геометрического
ряда скоростей называется формулой структуры привода.
12.
Проверка осуществимости вариантаRp ( p 1) x Rp 8
Проверка выполняется только для последней переборной группы,
т.к ее характеристика максимальна.
Пример:
z 3(4) 2(2) 2(1)
1,41
Rp 1,41(3 1) 4 1,418 16
Rp 16 Rp 8 неосуществим
z 18 3(1) 3(3) 2(9)
Rp 1,26 ( 2 1) 9 1,269 8 вариант осуществим
13.
Строим структурную сеткуZ=3(1)•2(3)•2(6)
14.
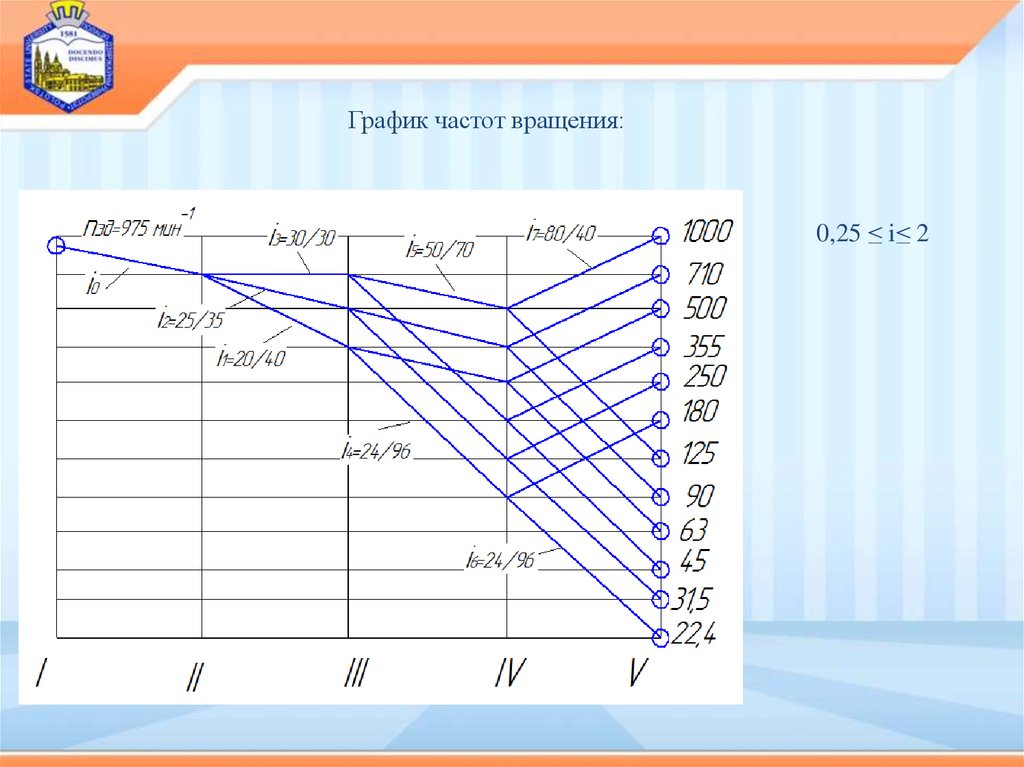
График частот вращения:0,25 ≤ i≤ 2
15.
Кинематическая схема привода главного движенияZ=3(1)•2(3)•2(6)
16.
Определение численных значений передаточных отношений:1
4
i1
1,26 5
1
7
i2
1,26 2 11
1
1
i3
3
2
1,26
1
2
i4
1,26 4 5
1
1
i5
;
5
3
1,26
1
1
i6
1,26 6 4
1
5
i1
7
1,41
1
1
i2
2
2
1,41
1
6
4 3
i3
3
17 11 9
1,41
1
1
i4
4
4
1,41
17.
inфакт nст
nст
100%
Таблица 3.1 – Погрешности частот вращения
ni
n1
n2
n3
n4
n5
n6
n7
n8
n9
n10
n11
n12
Уравнение кинематической
цепи УКЦ
20 24 24
975 0, 72
40 96 96
25 24 24
975 0, 7
35 96 96
30 24 24
975 0, 7
30 96 96
20 50 24
975 0, 7
40 70 96
25 50 24
975 0, 7
35 70 96
30 50 24
975 0, 7
30 70 96
20 24 80
975 0, 7
40 96 40
20 25 80
975 0, 7
40 35 40
30 24 80
975 0, 7
30 96 40
20 50 80
975 0, 7
40 70 40
25 50 80
975 0, 7
35 70 40
30 50 80
975 0, 7
30 70 40
Число n
фактическое
стандартное
i, %
21,3
22,4
4,9
30,4
31,5
3,4
42,6
45
5,3
60,9
63
3,3
86,5
90
3,8
121
125
3.2
170,6
180
5.2
243,7
250
2.5
341
355
3.8
487,5
500
2.5
692,2
710
2,5
969
1000
3,0