





 programming
programmingSimilar presentations:










Лабораторна установка по дослідженню вбудованих систем керування на базі контролера Segnetics
1.
Лабораторна установка по дослідженнювбудованих систем керування на базі контролера Segnetics
Магістр:
Волошин А.А.
Керівник:
Гладир А.І.
2.
2Мета: розробка та дослідження вбудованих систем керування на
базі мікроконтролерів Segnetic та введення їх в навчальний процес.
Список основних задач:
1. Аналіз існуючих систем керування на базі мікроконтролера.
2. Розробка структури стенду.
3. Розробка алгоритмів роботи комплексу.
4. Розробка програмного забезпечення для нижнього рівня.
5. Впровадження комплексу в навчальний процес.
Наукова новизна: Розроблений комплекс дає можливість досліджувати та
аналізувати вбудовані системи управління и використовувати
їх для реалізації гнучкого автоматизованого виробництва
на основі мікро-ЕВМ з можливістю багаторазової зміни
алгоритму роботи об'єкта управління.
3.
Структурна схема стенду для дослідженнявбудованих систем керування
3
4.
Алгоритм роботи стенду мікроклімат4
Початок
Початок
Введеня порогових значень
температури
Опитування
датчиків
Запис в память порогових значень
температури
Ввід на екран
положення
Збір інформації з датчиків температури
Режим роботи
Перетворення сигналів в дискретні
Опитування
клавіш контролера
Опитування
клавіш контролера
Ні
Температура більше
заданної?
Так
Температура менше
заданної?
Влючення витяжка
Ні
Виставлення
виходів
контролера
Запис в пам'ять
Перевірка на
запуск
Так
Ні
Температура менше заданної
більш ніж на 5 градусів?
Включення нагрівача
Закінчення
виконання
Так
Зменшення керуючого сигналу на
перетворювач частоти
Ні
Зчитування з
пам'яті
Температура ченша від заданої
менш ніж на 3 градуси
Виставлення
виходів
контролера
Так
Зменшення керуючого сигналу на
перетворювач
Опитування
датчиків
Так
Температура більше заданої?
Ні
Порівняння
сигналу датчиків
Виключення витяжки
Кінець
Алгоритм роботи стенду мікроклімат
Кінець
Вивід помилки
Алгоритм роботи маніпулятора МП-9С
5.
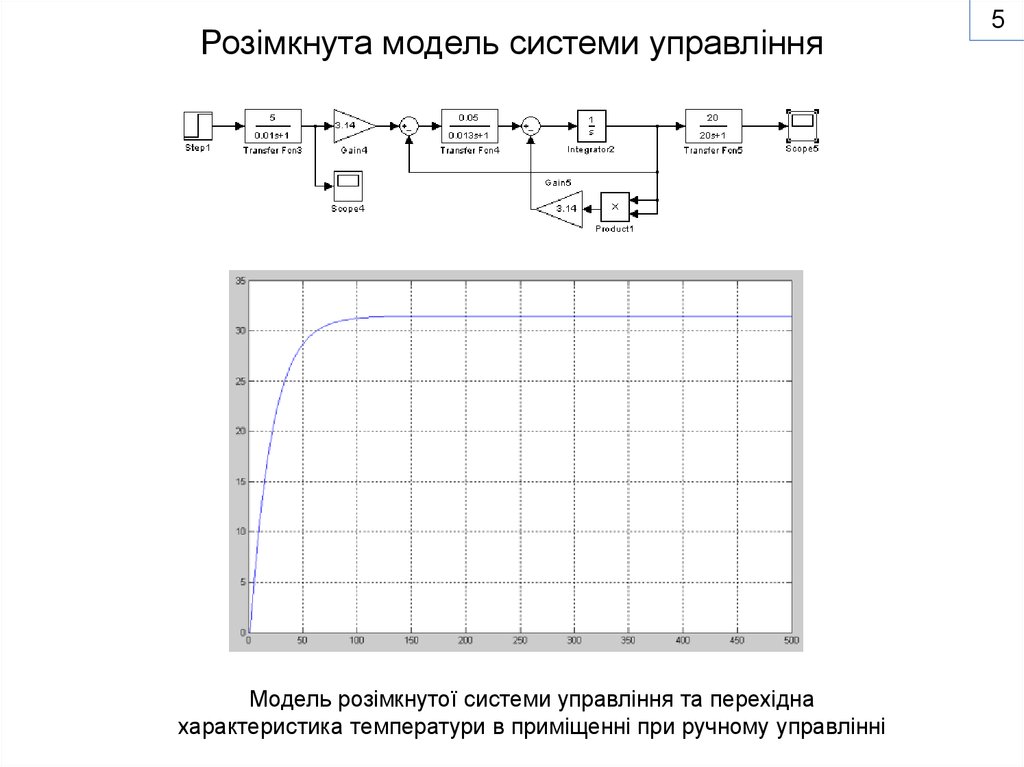
Розімкнута модель системи управлінняМодель розімкнутої системи управління та перехідна
характеристика температури в приміщенні при ручному управлінні
5
6.
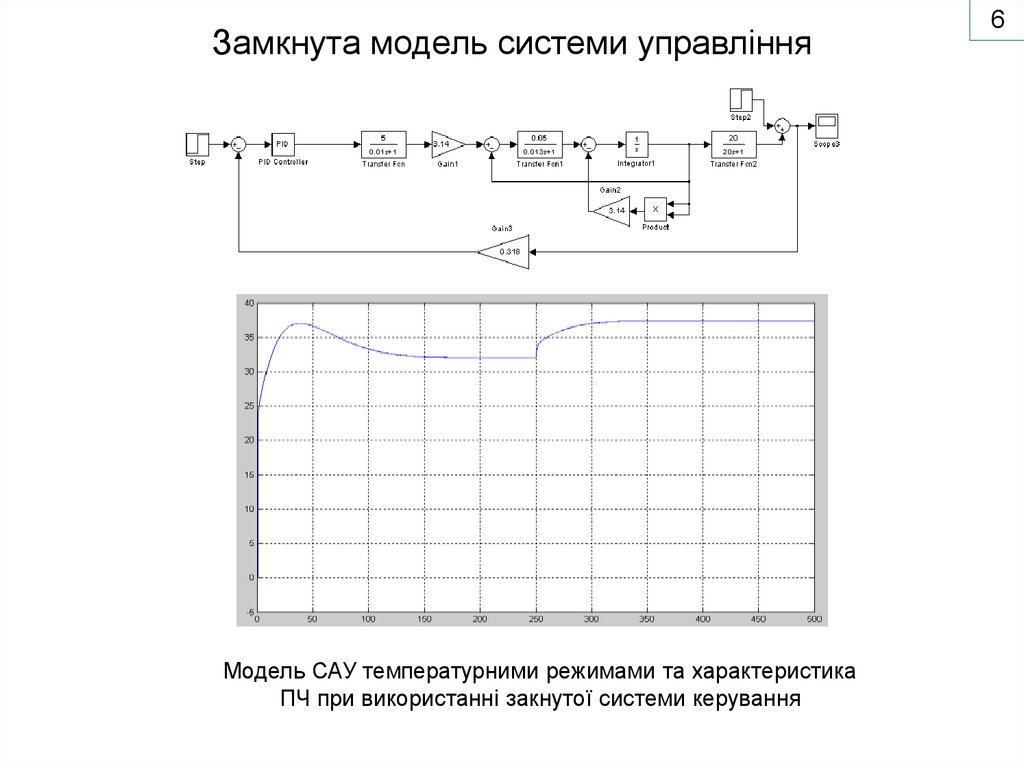
Замкнута модель системи управлінняМодель САУ температурними режимами та характеристика
ПЧ при використанні закнутої системи керування
6
7. Програма керування маніпулятором МП-9С
Макрос автоматичного режиму керуванняМакрос ручного режиму керування
7
8. Блок-діаграма для реалізації ПІД-регулятора
8Блок-діаграма для реалізації ПІД-регулятора
Макрос для контролю обриву лінії
Макрос для перевірки правильності
виконання алгоритму
9.
9Програма керування мікрокліматом
+
10. Висновки по виконаній роботі:
10Висновки по виконаній роботі:
Створено портативний стенд на базі контролеру SMH2010, плати розширення
FS-01 та плати збільшення навантаження RPS-2010.
Для контролеру SMH2010, мовою програмування Smlogіх, була написана
програма керування промисловим маніпулятором МП-9С в автоматичному та
ручному режимах.
Була спроектована система контролю і керування температурними режимами
для лабораторного комплексу "Мікроклімат"
В ході досліджень були виявлені недоліки комплексу.
Розроблені приклади алгоритмів керування можуть служити для проведення
лабораторного практикуму.