 mechanics
mechanicsSimilar presentations:


")







Стійкість та плавність ходу автомобіля. Підвіска автомобіля як спосіб зменшення амплітуди коливань останнього. Лекція 1.1
1.
Лекція 1.1Стійкість та плавність ходу автомобіля.
Підвіска автомобіля як один із способів
зменшення амплітуди коливань останнього
2.
Функціональні (експлуатаційні) властивості автомобіляДля автомобіля, як і для будь-якого виробу, розрізняють дві групи
основних властивостей: функціональні властивості та властивості надійності.
Функціональні властивості забезпечують виробу можливість виконувати
функції, обумовлені його призначенням. Стосовно автомобіля ці властивості
називають експлуатаційними.
Будь-якою функціональною (експлуатаційною) властивістю автомобіля
будемо називати притаманну йому здатність певним чином змінювати свій стан
або положення у просторі під дією внутрішніх або зовнішніх чинників.
Але кожний виріб (у нашому випадку – автомобіль) спроможний
виконувати свої функції, лише якщо він перебуває у працездатному стані, тобто
коли всі параметри, що характеризують його здатність виконувати свої функції,
відповідають вимогам нормативної та конструкторської документації.
Спроможність зберігати працездатний стан забезпечують виробу
(автомобілю) властивості надійності.
Ми розглядатимемо тільки експлуатаційні властивості автомобіля.
Сучасний автомобіль – складна машина, що має велику кількість
функціональних елементів, які, якщо розглядати автомобіль як систему, можуть
бути відносно нього підсистемами різних (першого, другого, третього і т.д.)
ієрархічних рівнів. Прямі та зворотні зв’язки між цими функціональними
елементами і визначають експлуатаційні властивості автомобіля.
2
3.
3Знання теорії експлуатаційних властивостей автомобіля дозволяє
вирішувати задачі, пов’язані зі створенням найбільш раціональної конструкції як
усього автомобіля, так і окремих його функціональних елементів, а також з
організацією правильної технічної експлуатації автомобіля та перевізного
процесу.
Стійкість – здатність автомобіля зберігати заданий напрям руху при впливі
на автомобіль зовнішніх сил, які прагнуть відхилити його від цього напряму при
зафіксованих колесах.
Принципова різниця між поняттями керованість та стійкість полягає в тому,
що керованість – здатність автомобіля рухатися за заданою траєкторією при
впливі водія, а стійкість - це здатність автомобіля забезпечувати рух за заданою
траєкторією без впливу водія.
Плавність ходу – здатність автомобіля рухатися в заданому інтервалі
швидкостей по дорогах з нерівною поверхнею без значних вібраційних та
ударних впливів на водія, пасажирів чи вантаж.
4.
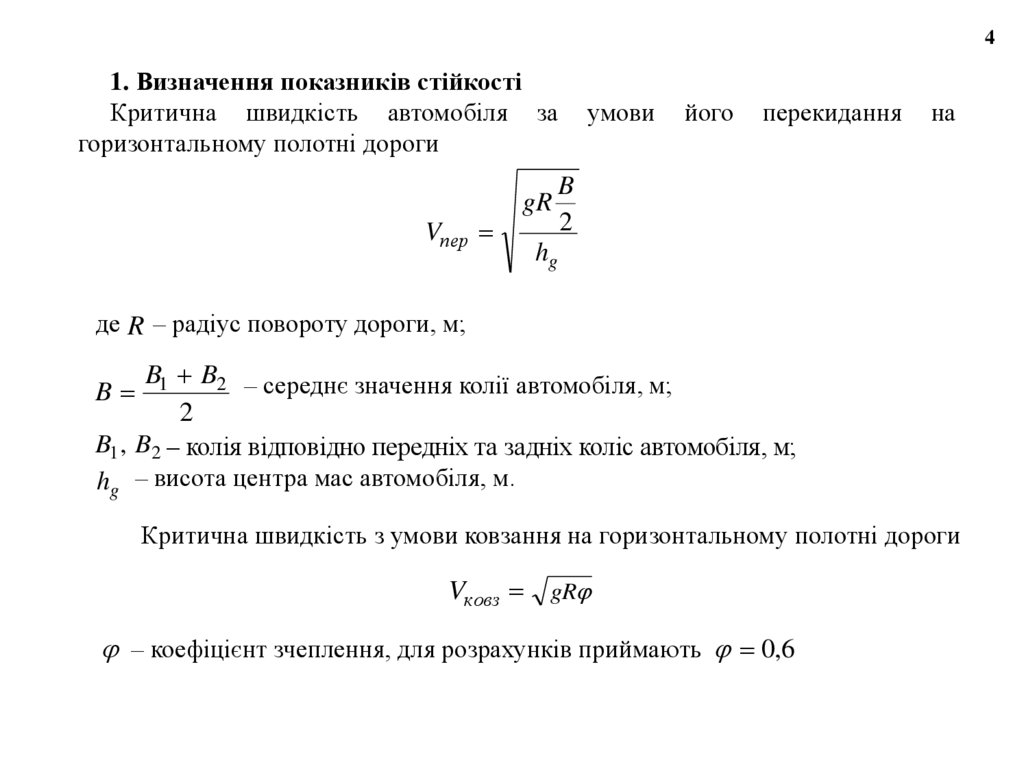
41. Визначення показників стійкості
Критична швидкість автомобіля за
горизонтальному полотні дороги
Vпер
gR
умови
його
перекидання
на
B
2
hg
де R – радіус повороту дороги, м;
B1 B2 – середнє значення колії автомобіля, м;
2
B1 , B2 – колія відповідно передніх та задніх коліс автомобіля, м;
hg – висота центра мас автомобіля, м.
B
Критична швидкість з умови ковзання на горизонтальному полотні дороги
Vковз gR
– коефіцієнт зчеплення, для розрахунків приймають 0,6
5.
5Якщо дорога обладнана віражем (поперечним ухилом полотна дороги), то
критичні швидкості руху визначаються за такими залежностями
в
Vпер
B
gR hg tg
2
,
B
hg tg
2
в
Vковз
де 40
gR tg
,
1 tg
– кут поперечного нахилу полотна дороги.
в
в
Обчисливши значення Vпер та Vковз , а такожVпер
та Vковз для 9…10 значень
радіусів повороту в межах 20...100 м, зводять результати розрахунків у
таблицю (див. табл. 1) та будують графіки залежностей критичних швидкостей
руху автомобіля від радіуса повороту на горизонтальному полотні дороги
в
в
і Vпер R та Vковз R на віражі Vпер R і Vковз R (рис. 1).
6.
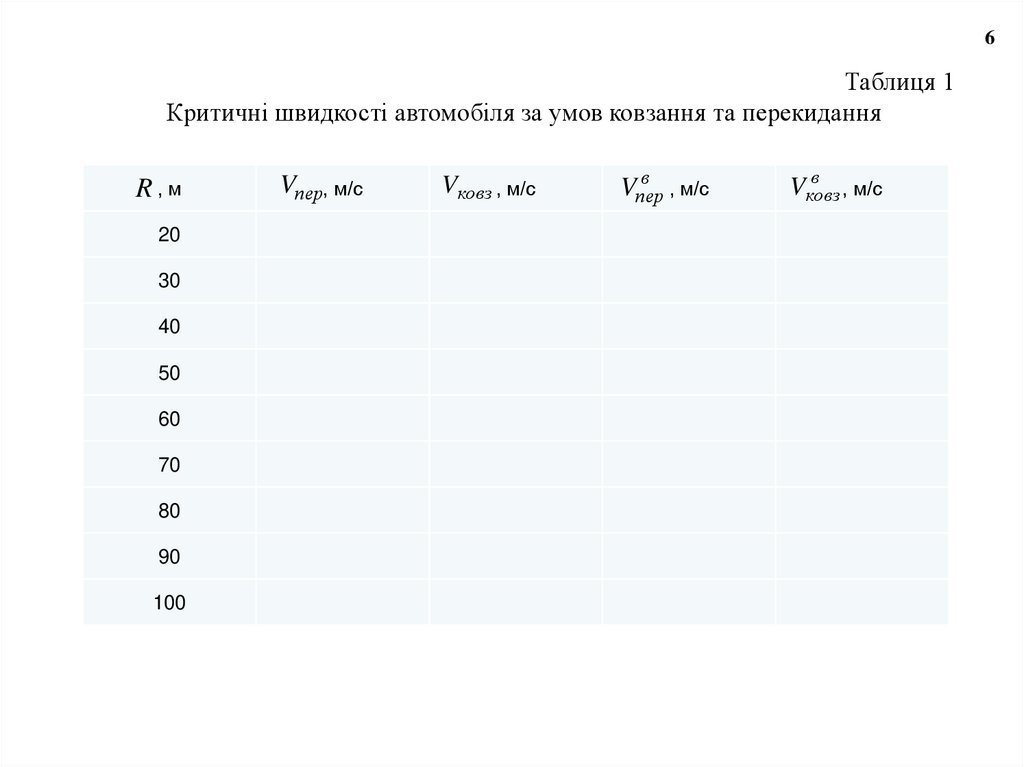
6Таблиця 1
Критичні швидкості автомобіля за умов ковзання та перекидання
R,м
20
30
40
50
60
70
80
90
100
Vпер, м/с
Vковз , м/с
в
, м/с
Vпер
в
Vковз
, м/с
7.
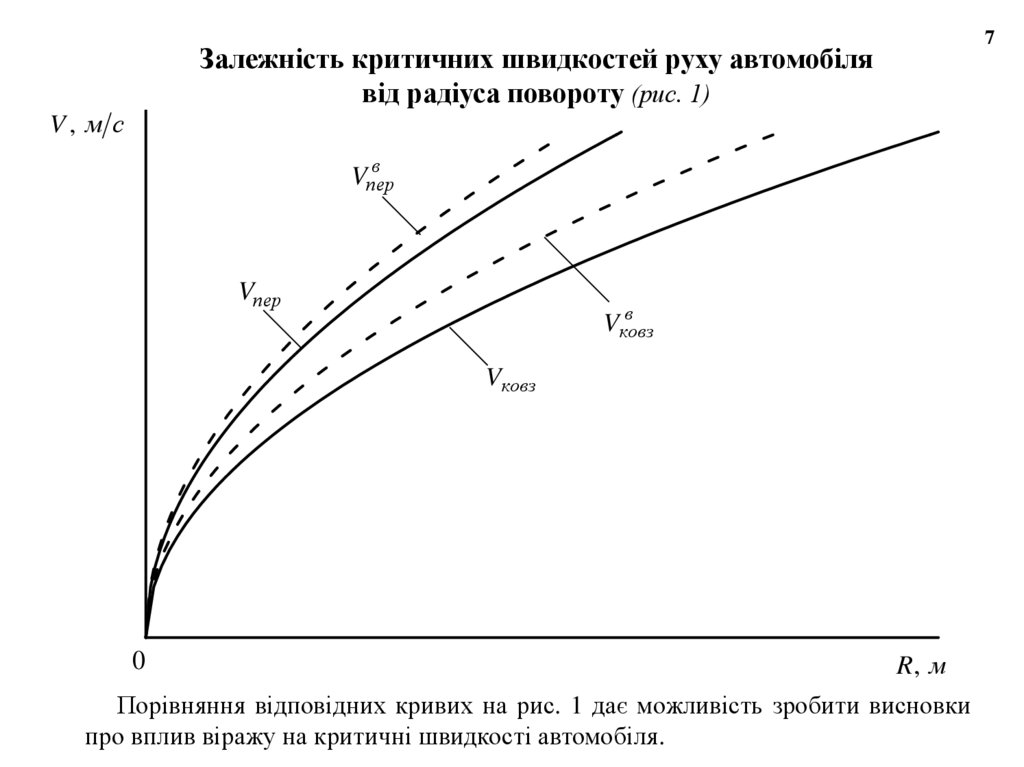
Залежність критичних швидкостей руху автомобілявід радіуса повороту (рис. 1)
V, м с
в
Vпер
Vпер
в
Vковз
Vковз
R, м
Порівняння відповідних кривих на рис. 1 дає можливість зробити висновки
про вплив віражу на критичні швидкості автомобіля.
0
7
8.
82. Визначення показників плавності ходу автомобіля
Основними оціночними показниками плавності ходу є частота вільних
коливань підресорених і непідресорених мас, швидкість, прискорення та
швидкість зміни прискорення коливань підресорених мас.
Підресорені маси здійснюють низькочастотні коливання з частотою
vн
1
2
g
,
f ст Гц ,
де f ст – статичний прогин підвіски, м; f ст 0,15 ...0,25 м у легкових
автомобілів, f ст 0,08 ...0,13 м у вантажних автомобілів та міських автобусів,
f ст 0,12 ...0,18 м у міжміських автобусів. Менші значення f ст беруть для
задньої підвіски, більші – для передньої.
Плавність ходу легкових автомобілів вважається задовільною, якщо
vн 0,8 ...1,3 Гц ; вантажних автомобілів та міських автобусів – 1,3...1,8 Гц;
міжміських автобусів – 0,70...1,35 Гц.
Обчислюють значення для автомобіля, який розглядається, та порівнюють
із вказаними величинами.
9.
9Непідресорені маси мостів здійснюють високочастотні коливання,
зумовлені жорсткістю шин, з частотою
vв
1
2
Сш
mм
Гц ,
де Сш – сумарна жорсткість шин моста, Н/м;
m м – маса моста, кг.
При відсутності даних про жорсткість шин орієнтовно можна взяти
vв 6,7 ...8,5 Гц (менші значення – передня підвіска, більші – задня).
Крім вільних коливань, автомобіль здійснює також вимушені коливання з
частотою
V
vвим a Гц ,
S
де Vа – швидкість автомобіля, м/с;
S – довжина хвилі нерівності на дорозі, м; S 0,5...5,0 м.
При швидкостях руху від 0 до 60 км/год можливий резонанс коливань як
підресорених ( vн vвим – низькочастотний резонанс), так і непідресорених
мас ( vв vвим – високочастотний резонанс).
Швидкість руху, при якій може настати резонанс, обчислюють за
виразом
10.
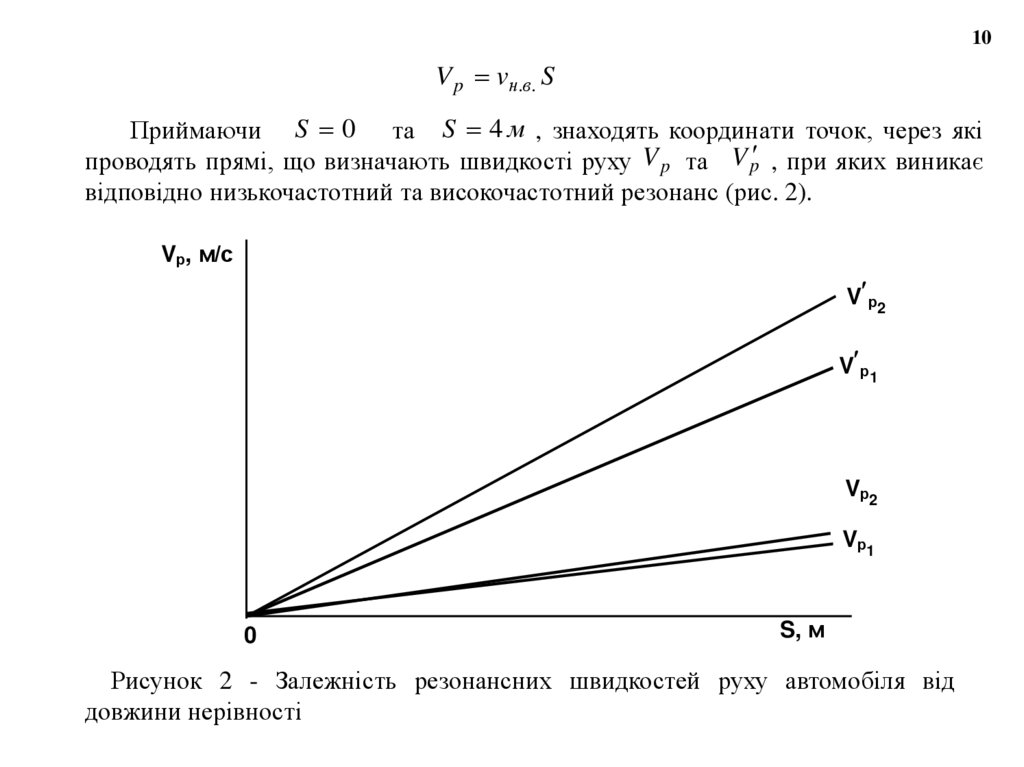
10V p vн.в. S
Приймаючи S 0 та S 4 м , знаходять координати точок, через які
проводять прямі, що визначають швидкості руху V p та V p , при яких виникає
відповідно низькочастотний та високочастотний резонанс (рис. 2).
Vр, м/с
V р2
V р1
Vр2
Vр1
0
S, м
Рисунок 2 - Залежність резонансних швидкостей руху автомобіля від
довжини нерівності
11.
11Швидкість та прискорення коливань підресорених мас визначають за
формулами:
Z к1, 2 Z0 v1,2 ; Z k1, 2 Z0 v12,2
Швидкість зміни прискорень при коливаннях
Z v3
Z
к1, 2
0 1, 2
У наведених виразах висоту нерівності Z 0 беруть 0,05 м.
12.
123. Підвіска автомобілів як один із способів зменшення амплітуди
коливань останнього
Одним із способів зменшення амплітуди коливань, що виникають
внаслідок руху автомобіля та роботи двигуна останнього, є використання
підвіски.
Хорошою плавність хода вважається така, при якій кузов здійснює
коливання з частотою 1 – 1,3 Гц.
Підвіска автомобіля служить для пом’ягшення ударів і поштовхів, що
сприймають колеса від нерівностей дороги, гасіння коливань рами або кузова і
пониження динамічних навантажень на несучу систему.
Класифікація підвісок здійснюється за наступними критеріями:
1) за типом напрямного пристрою: залежні та незалежні;
2) за типом пружного пристрою: металеві та неметалеві;
3) за способом передачі сил моментів від коліс: ресорні, штангові,
важельні;
4) за способом гасіння коливань: за рахунок тертя у пружному та
напрямному пристроях, за рахунок тертя у демпферному пристрої.
Підвіска складається з пружного елементу, напрямного пристрою,
амортизатора і стабілізатора поперечної стійкості.
13.
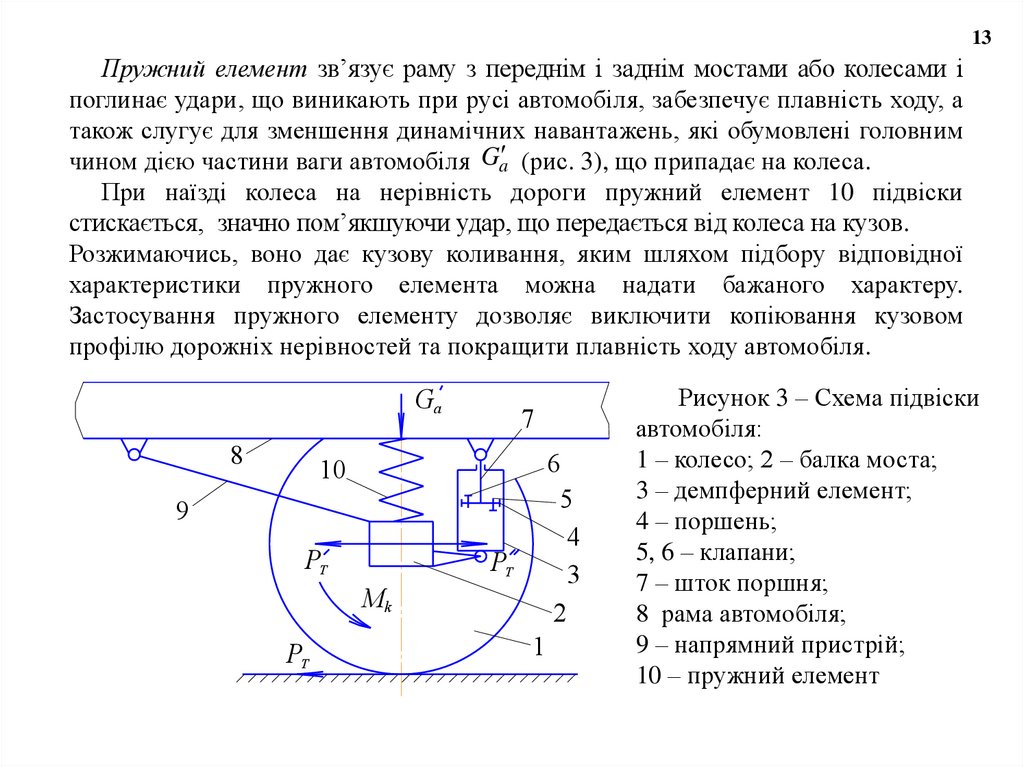
13Пружний елемент зв’язує раму з переднім і заднім мостами або колесами і
поглинає удари, що виникають при русі автомобіля, забезпечує плавність ходу, а
також слугує для зменшення динамічних навантажень, які обумовлені головним
чином дією частини ваги автомобіля Ga (рис. 3), що припадає на колеса.
При наїзді колеса на нерівність дороги пружний елемент 10 підвіски
стискається, значно пом’якшуючи удар, що передається від колеса на кузов.
Розжимаючись, воно дає кузову коливання, яким шляхом підбору відповідної
характеристики пружного елемента можна надати бажаного характеру.
Застосування пружного елементу дозволяє виключити копіювання кузовом
профілю дорожніх нерівностей та покращити плавність ходу автомобіля.
Ga
8
7
6
5
4
3
2
10
9
PТ
PТ
Mk
PТ
1
Рисунок 3 – Схема підвіски
автомобіля:
1 – колесо; 2 – балка моста;
3 – демпферний елемент;
4 – поршень;
5, 6 – клапани;
7 – шток поршня;
8 рама автомобіля;
9 – напрямний пристрій;
10 – пружний елемент
14.
14Існує два основних способи оптимізації або зниження негативних впливів
фрикційних сил у ресорі: зменшення числа тертьових пар і значень
коефіцієнтів зчеплення та тертя.
Перший спосіб оптимізації робочих характеристик реалізується завдяки
використанню пружних опор і застосуванню малолистових ресор пониженої
металомісткості, які мають і інші переваги перед багатолистовими ресорами.
Другий спосіб передбачає зниження і стабілізацію коефіцієнтів зчеплення
і тертя. Це досягається застосуванням пластмасових антифрикційних
прокладок на кінцях листів. Найменші коефіцієнти зчеплення і тертя ковзання
забезпечують фторопласти, що відрізняються виключно високою
стабільністю.
Теоретичними і експериментальними дослідженнями встановлено, що
найменш матеріаломісткі та найбільш компактні при однаковій потужності
гідравлічні гасники – гідроамортизатори (рис. 4).
Вони піддаються
регулюванню і мають стабільність робочих характеристик у широкому
діапазоні частот коливань (до 20 Гц). Ці переваги притаманні також
пневмогідравлічним і гідравлічним пружним пристроям з гасячою дією.
При виникненні різких коливань рами ходової частини зростає опір
гідроамортизатора, оскільки рідина у ньому не встигає пройти через канали у
поршні. В результаті гідравлічного гальмування, що виникає, гасяться
коливання штока і зв’язаних з ним конструктивних елементів.
15.
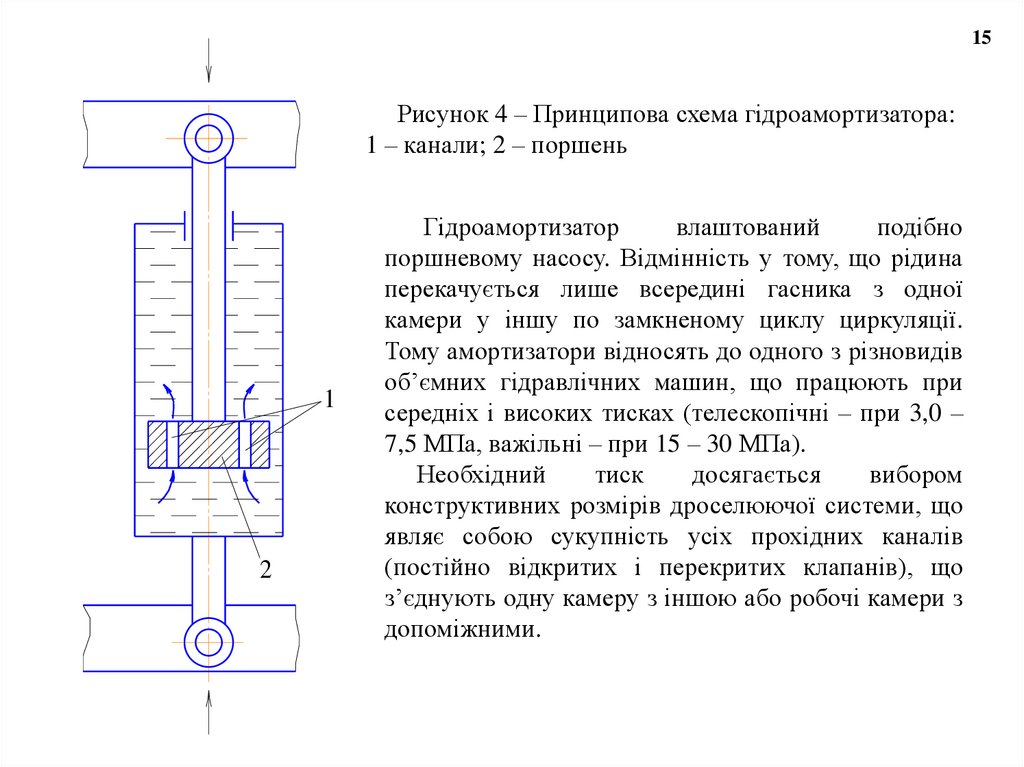
15Рисунок 4 – Принципова схема гідроамортизатора:
1 – канали; 2 – поршень
1
2
Гідроамортизатор
влаштований
подібно
поршневому насосу. Відмінність у тому, що рідина
перекачується лише всередині гасника з одної
камери у іншу по замкненому циклу циркуляції.
Тому амортизатори відносять до одного з різновидів
об’ємних гідравлічних машин, що працюють при
середніх і високих тисках (телескопічні – при 3,0 –
7,5 МПа, важільні – при 15 – 30 МПа).
Необхідний
тиск
досягається
вибором
конструктивних розмірів дроселюючої системи, що
являє собою сукупність усіх прохідних каналів
(постійно відкритих і перекритих клапанів), що
з’єднують одну камеру з іншою або робочі камери з
допоміжними.
16.
16Дроселююча система повинна бути так розрахована і виконана, щоб при
усіх робочих режимах роботи, включаючи екстремальні, забезпечувалась
задана характеристика опору і необхідна інтенсивність гасіння коливань.
Однією з найважливіших умов забезпечення надійності гідроамортизатора є
застосування високоякісних робочих рідин.
Радикальне підвищення якості гідроамортизаторів може бути досягнуто
завдяки застосуванню напівавтоматично і автоматично регульованих
конструкцій.
У дорожньо-будівельних машинах успішно застосовують пасивну
гідропневматичну систему віброізоляції та активну електрогідравлічну
віброзахисну систему.
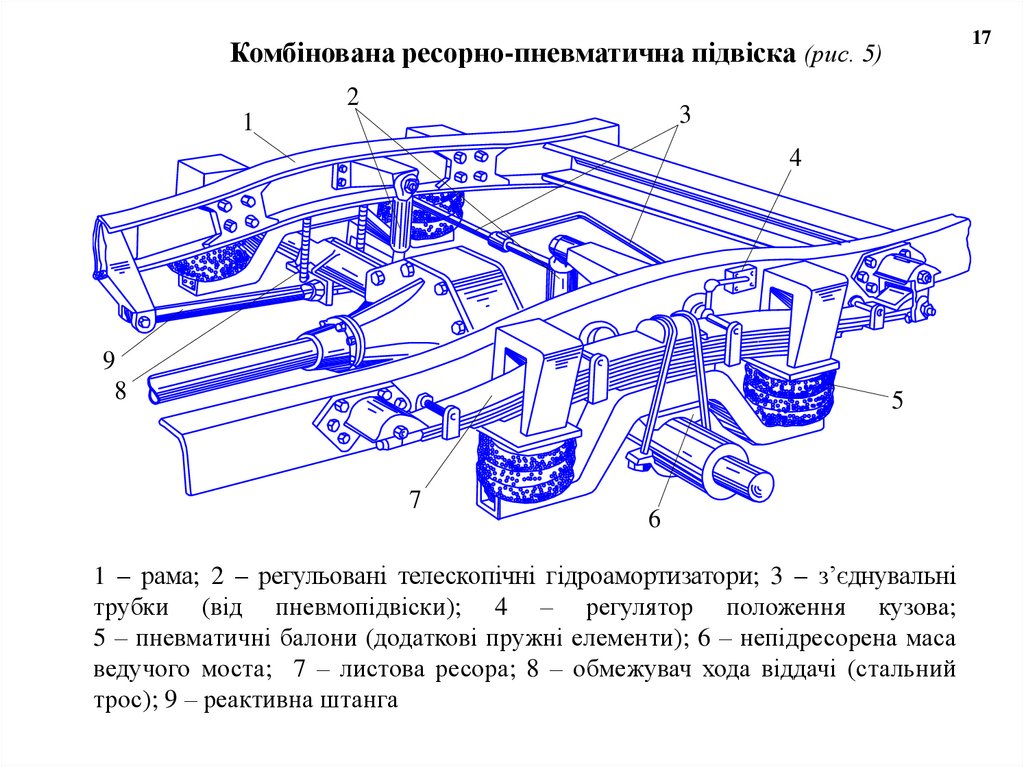
Комбінована ресорно-пневматична підвіска представлена на рис. 5.
Листова ресора являється одночасно пружним, гасячим і напрямним
пристроєм. У системах підвіски з використанням витих пружин, торсіонів,
пневматичних пружних елементів застосовують гідравлічні гасники коливань –
гідроамортизатори. Крім того, гідроамортизатори встановлюють в системах
віброзахисту (в підвісках кабіни, сидіння, апаратури і т. п.). У несучих системах
транспортних машин рекомендується застосовувати підвищений непружний
опір – демпфування, у тому числі кероване.
17.
17Комбінована ресорно-пневматична підвіска (рис. 5)
2
3
1
4
9
8
5
7
6
1 – рама; 2 – регульовані телескопічні гідроамортизатори; 3 – з’єднувальні
трубки (від пневмопідвіски); 4 – регулятор положення кузова;
5 – пневматичні балони (додаткові пружні елементи); 6 – непідресорена маса
ведучого моста; 7 – листова ресора; 8 – обмежувач хода віддачі (стальний
трос); 9 – реактивна штанга