


 трехступенчатых дистанционных защит")



; ʘ промежуточной подпитки и")

 на измерение сопротивления")







 electronics
electronicsSimilar presentations:



")






Комплексы релейной защиты линий электропередач. Дистанционная защита. Релейная защита и автоматика электроэнергетических систем
1.
Комплексы релейной защиты линийэлектропередач
Дистанционная защита
Дисциплина
Релейная защита и автоматика электроэнергетических систем
доцент ОЭЭ
Шестакова Вера Васильевна
2021
2. Дистанционная защита линий
Область применения:• линии 110 – 750 кВ,
• для Т блоков и АТ 220 кВ и выше,
• для мощных генераторов.
Принцип действия: сравнение комплексного сопротивления
между местом установки ДЗ и местом КЗ с заданной
характеристикой срабатывания.
ДЗ предназначена для отключения трех- и междуфазных КЗ.
ZЛ
ZКЗ = UКЗ/IКЗ
System
ZS
IКЗ
UКЗ
ZНАГ
ДЗ
2
3. Схема подключения измерительных трансформаторов и подведения входных величин к ДЗ
АЭЭС' В
Q
UA
TA1
UB
С
TV1
UA, UВ, UС
IВ
UC
UA TA2 IAQ
IA
UB
IС
IA, IВ, IС
ДЗ1
TV2
UA, UВ, UС
IВ
UC
ЭЭС''
IС
IA, IВ, IС
ДЗ2
Комбинировать фазные токи и напряжения можно по-разному,
но целесообразно использовать следующие комбинации:
3
4. Примеры характеристик срабатывания (ХС) трехступенчатых дистанционных защит
Круговые и эллиптические хар-киЭлектромеханическая база
Полигональные хар-ки
Микропроцессорная база
Панель
ЭПЗ-1636
шкаф ШЭ 2607,
НПП «ЭКРА», Россия
4
5. Характеристика срабатывания дистанционной защиты
A15 А
шкаф ШЭ 2607 016_200,
НПП «ЭКРА», Россия,
Стр. 22 в описании
Чем определяются
диапазоны?
B
5
6. Схема учебной энергосистемы
67.
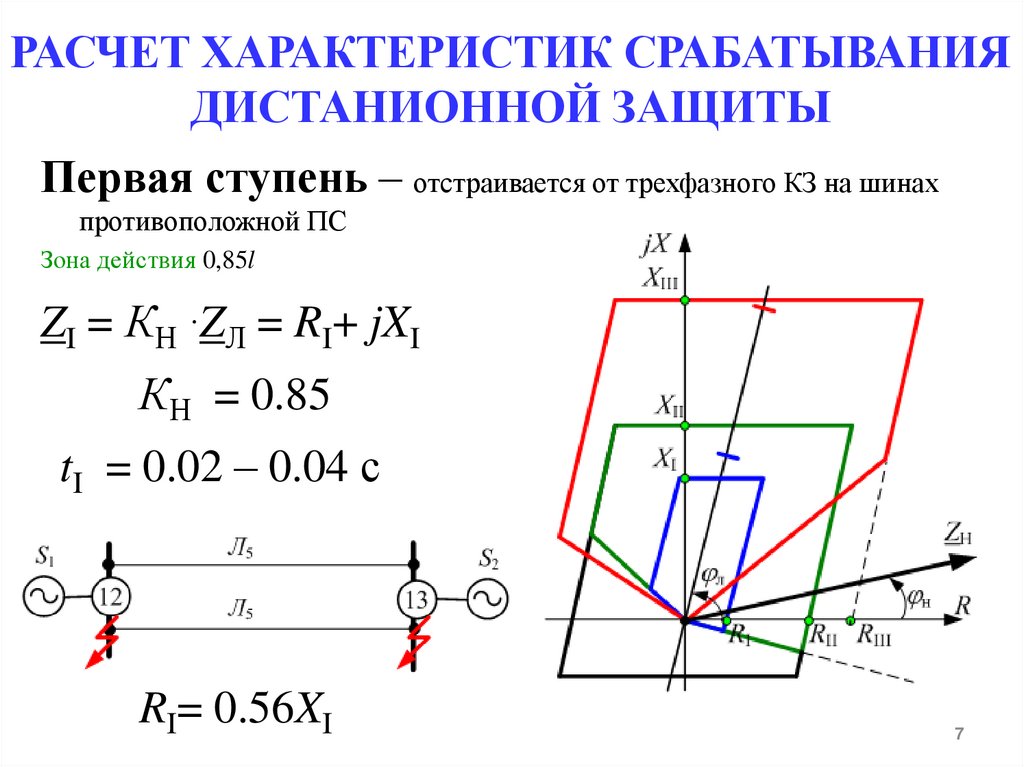
РАСЧЕТ ХАРАКТЕРИСТИК СРАБАТЫВАНИЯДИСТАНИОННОЙ ЗАЩИТЫ
Первая ступень – отстраивается от трехфазного КЗ на шинах
противоположной ПС
Зона действия 0,85l
ZI = КН ∙ZЛ = RI+ jXI
КН = 0.85
tI = 0.02 – 0.04 с
RI= 0.56XI
7
8.
Вторая ступеньtII = 0.3 – 0.5 с
Зона действия 1,1-1,5l
1. Согласуется с ХС первой
ступени предыдущей линии
ZI I = KH(ZЛ5 + KH∙Kток∙ZЛ6) = RII +jXII
Kток= IкЛ6/ IкЛ5
KH = 0.85
RII= (0.5-0.6)XII
2. Отстраивается от КЗ за трансформатором противоположной
подстанции
ZI I = KH(ZЛ5 + Kток.Т∙ZТmin) = RII +jXII
KЧ= ZII /ZЛ5 >1.25 для протяженных линий
Kток.Т= IкТ16/ IкЛ5
KЧ >1.5 для коротких линий с сопротивлением ZЛ < 20 Ом
8
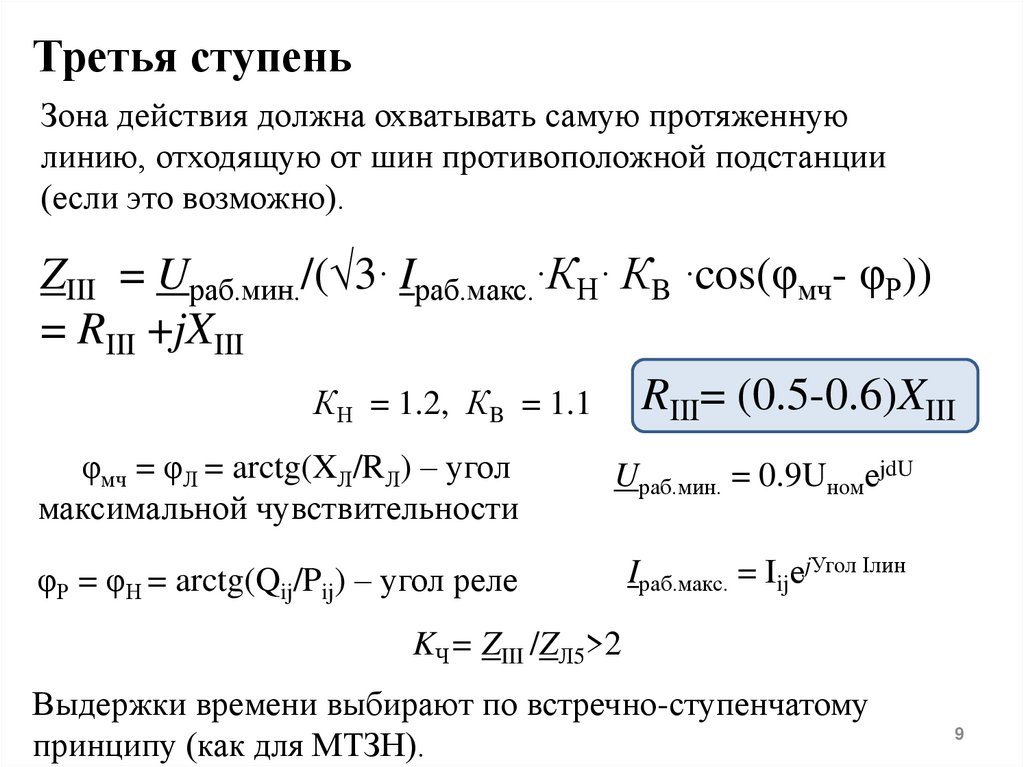
9.
Третья ступеньЗона действия должна охватывать самую протяженную
линию, отходящую от шин противоположной подстанции
(если это возможно).
ZIII = Uраб.мин./(√3∙ Iраб.макс.∙КН∙ КB ∙cos(φмч- φР))
= RIII +jXIII
КН = 1.2, КB = 1.1 RIII= (0.5-0.6)XIII
φмч = φЛ = arctg(XЛ/RЛ) – угол
максимальной чувствительности
Uраб.мин. = 0.9UномеjdU
φР = φН = arctg(Qij/Pij) – угол реле
Iраб.макс. = IijеjУгол Iлин
KЧ= ZIII /ZЛ5>2
Выдержки времени выбирают по встречно-ступенчатому
принципу (как для МТЗН).
9
10. Оценка селективности защиты. Необходимо учитывать влияние: ʘ сопротивления дуги (0.1 – 40 Ом); ʘ промежуточной подпитки и
подпитки от шинпротивоположной ПС;
ʘ режима сети (включение – отключение линий).
I1
Дуга – RД ≈ 5 Ом
I2
10
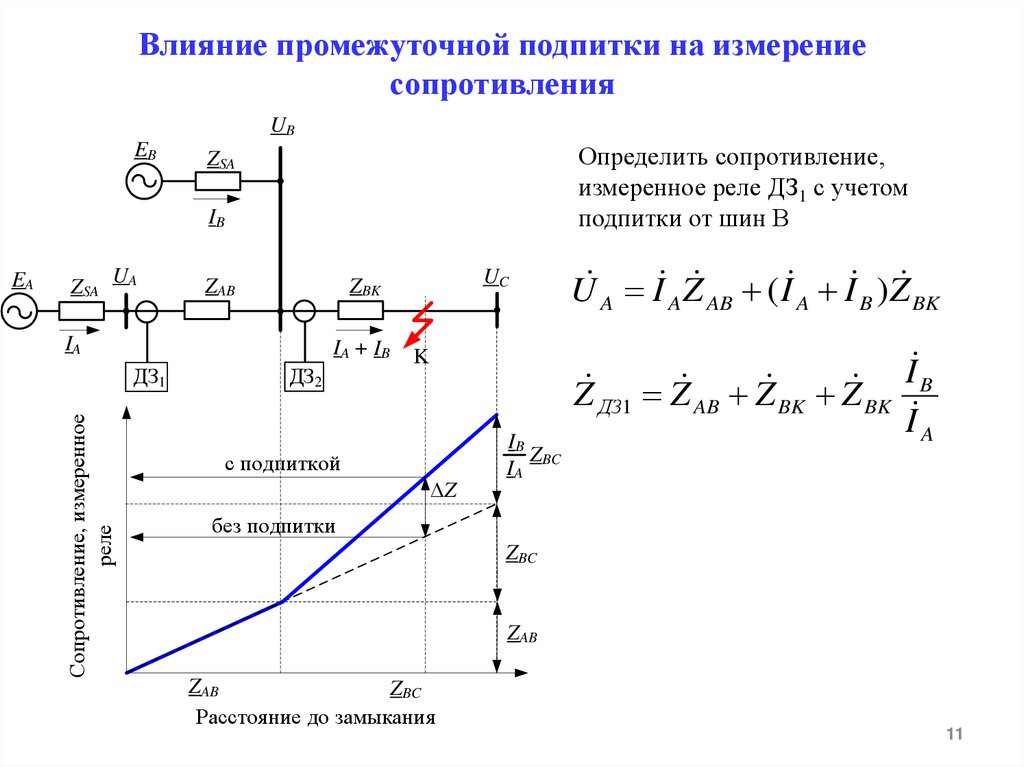
11.
Влияние промежуточной подпитки на измерениесопротивления
UB
EB
Определить сопротивление,
измеренное реле ДЗ1 с учетом
подпитки от шин В
ZSA
IB
ZSA
UA
ZAB
IA + IB
ДЗ1
UC
ZBK
IA
Сопротивление, измеренное
реле
EA
ДЗ2
K
с подпиткой
ΔZ
IB
Z
IA BC
U A I A Z AB ( I A I B )Z BK
I
Z ДЗ1 Z AB Z BK Z BK B
I A
без подпитки
ZBC
ZAB
ZAB
ZBC
Расстояние до замыкания
11
12. Влияние подпитки с противоположной стороны на измерение сопротивления при дуговом замыкании
ZS1x
ZL
l
D1
E1
U1
1 x Z L
l
ZS2
Pload
I2
I1
RF
I1 +I2
D2
U2
x
U 1 I 1Z L ( I 1 I 2 ) RF
l
x
I
Z ДЗ1 Z L RF RF 2
l
I
E2
1
X
δ = 6-12° E1
δ
I 2 I1
E2
δ
δ
E1
RF
E2
URF =ISCRF
I2
XL
I2
I1 RF
I1
ZL
Zone 1
I 2 I 2 e j 93
I 2 j 6 I 2
e
I 1 I1e j 87
I1
I1
ISC
R
RL
Location D1
12
13. Влияние режима сети (включение и отключение параллельных линий, трансформаторов) на измерение сопротивления
Al1
B
l2
C
Влияние режима сети
(включение и отключение
параллельных линий,
трансформаторов) на
измерение сопротивления
x
ZD12
Z2
ZD11
S
D1
ZD12
Z1
D2
Измеренное
сопротивле
ние
Z2
Z3
Сопротивление, измеренное
реле D1, при КЗ на шинах С
Z
ZD21
ZD12 Z
отстройка
Z
Z
Z D1 Z 1 2 3
Z 2 Z 3
1
ZD11
l
l1
Сопротивление до точки КЗ
l2
13
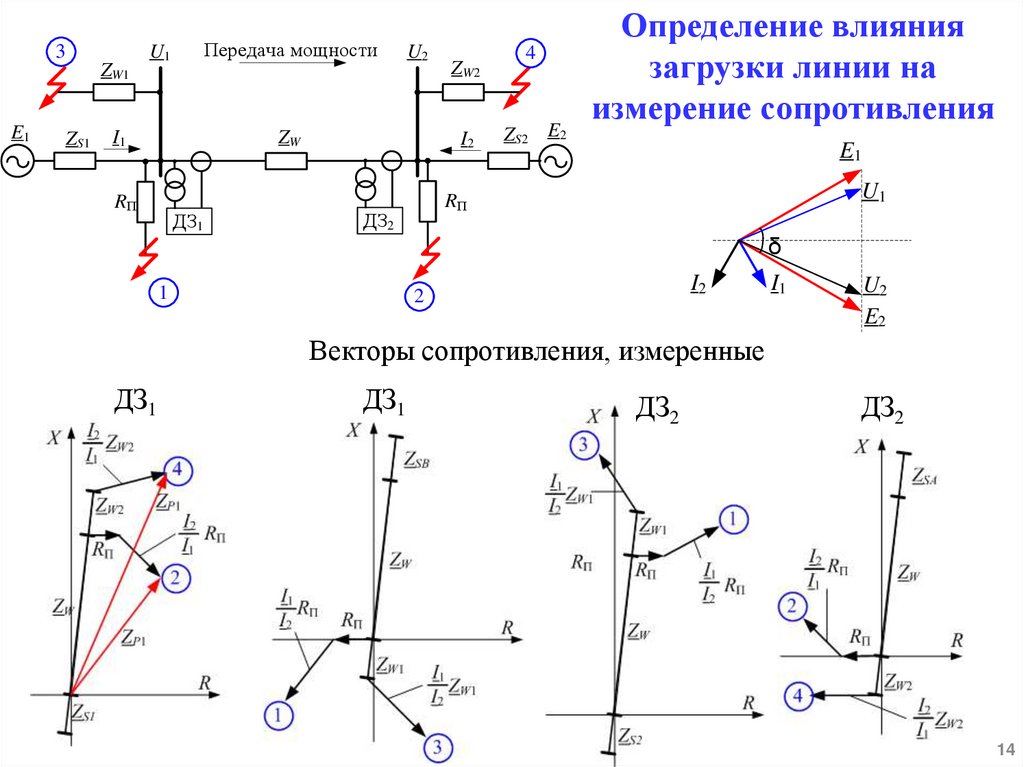
14.
3ZW1
E1
ZS1
Передача мощности
U1
I1
U2
ZW
RП
ДЗ1
ZW2
I2
4
ZS2 E2
Определение влияния
загрузки линии на
измерение сопротивления
E1
U1
RП
ДЗ2
δ
1
I2
2
I1
U2
E2
Векторы сопротивления, измеренные
ДЗ1
ДЗ1
ДЗ2
ДЗ2
14
15. Пример- Характеристики срабатывания
1516. Причины неправильной работы дистанционной защиты
Асинхронный режим (качание) – нарушение синхронной работыгенераторов (изменение угла δ при вращении вектора U1 относительно U2).
Одна из причин качаний – КЗ.
Схема электропередачи
и векторная диаграмма
в нормальном режиме работы
ΔU= U1-U2
U1U 2
P
sin( )
ZЛ
Диаграмма мощностей
16
17. Причины неправильной работы дистанционной защиты
Признаки нарушения синхронизма: периодические изменения тока и напряжения.i(t)
f1= 50 Гц, f2= 50 Гц
Δu(t))
p(t)= Δu(t)∙i(t)
Диапазон времени – 0.02 с
Изменение мощности
17
18. Причины неправильной работы дистанционной защиты
Признаки нарушения синхронизма: периодические изменения тока и напряжения.f1= 50 Гц, f2= 49 Гц
i(t)
Δu(t))
p(t)= Δu(t)∙i(t)
Диапазон времени – 1 с
18
19. Причины неправильной работы дистанционной защиты
Признаки нарушения синхронизма: периодические изменения тока и напряжения.f1= 50 Гц, f2= 48 Гц
i(t)
Δu(t))
p(t)= Δu(t)∙i(t)
Диапазон времени – 1 с
19
20. Блокировка дистанционной защиты при АР и качаниях
Способ 1. При КЗ в токах и напряжениях есть нулевая иобратная последовательности.
Fc1
Fa1
Fa 2
Fc 2
Fa 0 Fb 0 Fc 0
Fb 2
Fb1
Прямая
Несимметричная
система векторов
Обратная
последовательности
Нулевая
Разложение
системы векторов
на последовательности
При качаниях нулевая и обратная последовательности
отстутствуют.
20
21. Блокировка дистанционной защиты при АР и качаниях
Способ 2. При КЗ токи и напряжения (сопротивление ZКЗ)изменяются скачком. При АР сопротивление ZАР изменяется
сравнительно медленно.
Δt – время за которое вектор сопротивления пересекает
характеристику чувствительного реле и входит в характеристику
грубого реле. Если Δt > t0, то действие ДЗ блокируется.
21