












")






")









")






 industry
industrySimilar presentations:










Технология высокопроизводительного бурения
1.
Технология высокопроизводительногобурения
Обзор технологий
май 2002 г.
2. Новая эра автоматизированной забойной навигации
Новое поколение бурового оборудования• Повышенная механическая скорость бурения
• Повышенная механическая скорость скольжения
• Меньшее закручивание ствола
• Меньше извилистость ствола
• Снижение вибрации
• Выше надежность ГЗД и MWD
• Лучше очистка ствола
• Дольше срок службы долот
3.
Иерархия буровогооборудования
RST
SLICKBORE
AGM
AGS
DUMB IRON / ДВИГАТЕЛИ
КОЛИЧЕСТВО
СКВАЖИН
4.
Оборудование Sperry-Sun AGS™(Стабилизатор с регулируемым диаметром)
• Два положения
• Устанавливается гидравлически от
забоя
• Долота на забиваются
• ГЗД не стопорится
• Перемещается включением и
выключением насосов
• Четкая индикация положения на
пульте бурильщика
• Применяется 300 единиц
оборудования
• Диаметр ствола от 4 3/4” до 17 1/2”
• Плавное изменение траектории
5.
Как работает AGS6.
AGS в роторной КНБКПоршни убраны
Стабилизатор с рег. диам.
Пружинный стабилизатор
Поршни выдвинуты
Поршень
Наддолотный стабилизатор
Вмятина УБТ
7.
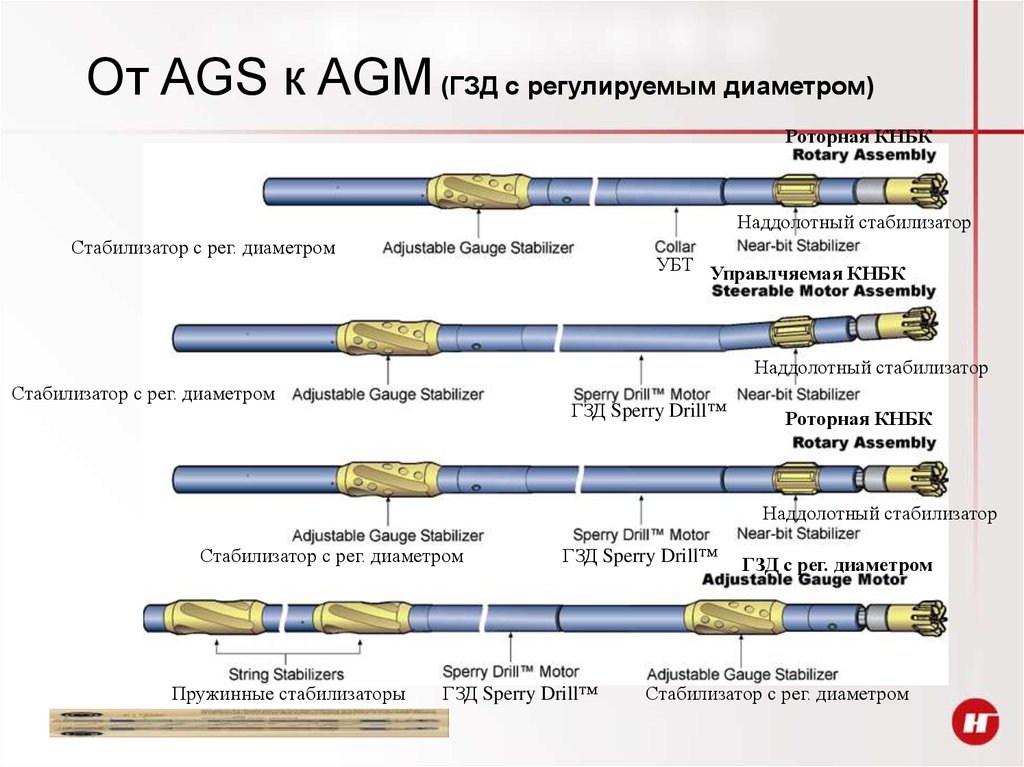
От AGS к AGM (ГЗД с регулируемым диаметром)Роторная КНБК
Наддолотный стабилизатор
Стабилизатор с рег. диаметром
УБТ Управлчяемая КНБК
Наддолотный стабилизатор
Стабилизатор с рег. диаметром
ГЗД Sperry Drill™
Роторная КНБК
Наддолотный стабилизатор
Стабилизатор с рег. диаметром
Пружинные стабилизаторы
ГЗД Sperry Drill™
ГЗД Sperry Drill™
ГЗД с рег. диаметром
Стабилизатор с рег. диаметром
8.
Почему AGM ?AGS дает небольшие изменения угла наклона, необходимые для
скважин с большим отходом или горизонтальных скважин (+/- 0.4 град.
/ 100 фут)
AGS над ГЗД не дает радикальных изменений угла наклона,
обеспечивает очень плавный профиль
Радикальные изменения могут быть получены, если установить AGS
ниже ГЗД
Надежность обоих инструментов снижается
AGM рассчитана на получение преимуществ обоих систем
Нынешние позиционирующие приборы дают +/- 3 град. / 100 футов, +/1 град. /100 футов если “переключены”
Трехпозиционный прибор дает +/- 3 град, плюс фиксированное
положение
9.
Резюме по AGS и AGMУстанавливаются переключением насосов – нет никакой
последовательности действий для фиксации – почти незаметно в
процессе бурения
Внутренне надежная система, испытана на протяжении более 5
лет, сотни спусков
Средняя наработка на отказ AGS составляет от 6000 до 11000
часов
С помощью AGS пробурена самая длинная (5001 метров)
горизонтальная скважина
Ставится прямо в стандартную КНБК – отсутствует
продолжительный период обучения
AGM восполняет недостающие возможности управления AGS
AGM обеспечивает полную коррекцию по углу наклона и
ограниченную азимутальную коррекцию
10.
SlickBore противобычного ГЗД
• Меньшее расстояние от долота
до изгиба
1
B1
D1
Позволяет увеличить протяженность
калиброванного диаметра
–
Снижает требуемый угол
искривления корпуса при том же
темпе набора кривизны
–
Уменьшает момент изгиба
–
Уменьшает радиус поворота
2
L2
L1
–
B2
D2
11.
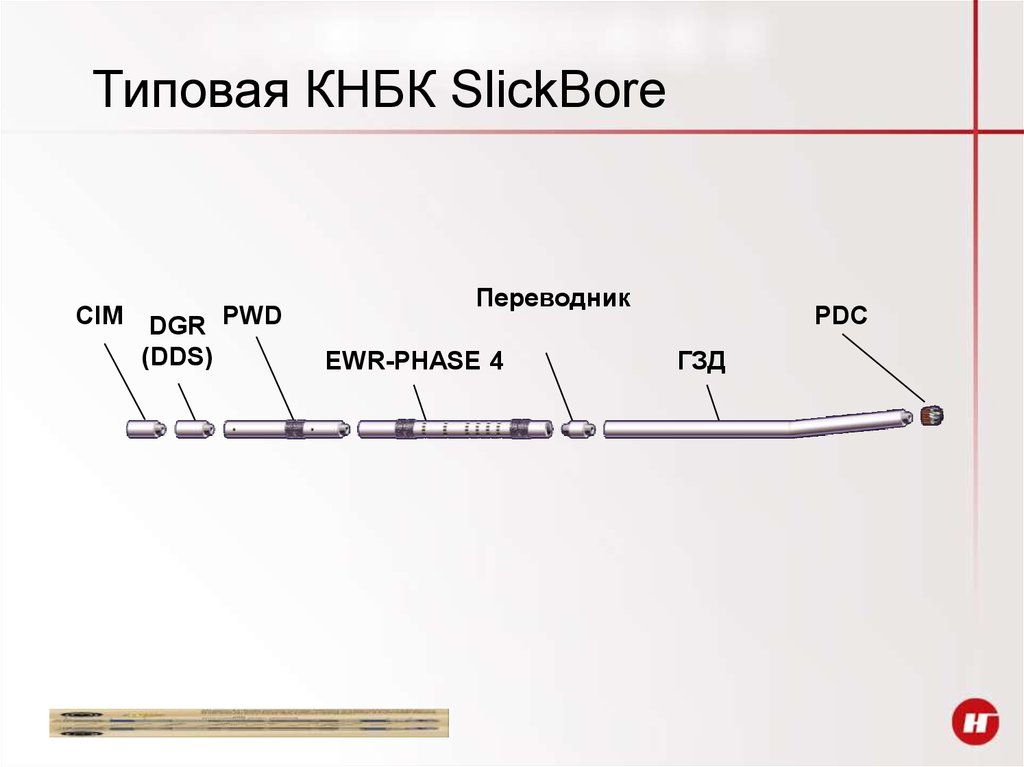
Типовая КНБК SlickBoreCIM
DGR PWD
(DDS)
Переводник
EWR-PHASE 4
PDC
ГЗД
12.
Результаты, полученные спомощью SlickBore
•Применялся в Северном море и на шельфе
Канады
•Сокращение времени бурения на 25-50%
•Доказанное улучшение качества ствола
•Меньше поломок MWD и ГЗД
•Меньше износ долот
•Датчики DDS™ подтверждают снижение
вибраций
•Обсадная колонна спускается на забой
очень легко
13.
Зависимость проходки отвремени бурения
7000
4500
5500
8000
6500
WEST
Actual
Planned
WEST
Series4
Actual
Planned
Series4
9000
Depth
Depth
7500
8500
9500
10500
10000
11000
12000
11500
13000
12500
14000
13500
0
10
20
30
40
0
50
10
20
Days
30
40
50
Days
4000
8000
9000
6000
Target
50/50
Series3
Actual
11000
Depth
8000
Depth
Planned
10000
Actual
10000
12000
13000
14000
15000
12000
16000
14000
17000
0
0.00 5.00 10.00 15.00 20.00 25.00 30.00 35.00 40.00 45.00 50.00 55.00 60.00 65.00 70.00
Days
5
10
15
20
25
30
35
40
Days
45
50
55
60
65
70
75
14. Стандартный ГЗД с долотом с укороченной калибрующей частью
Moderatevibrations
Spiral
borehole
15.
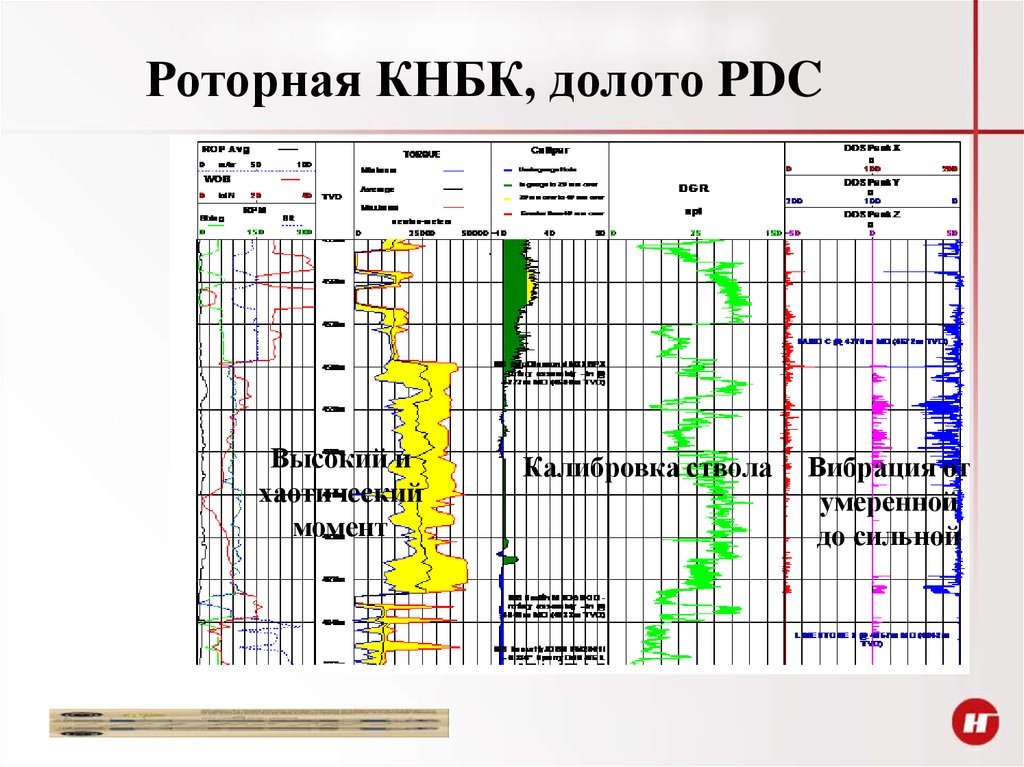
Роторная КНБК, долото PDCВысокий и
хаотический
момент
Калибровка ствола
Вибрация от
умеренной
до сильной
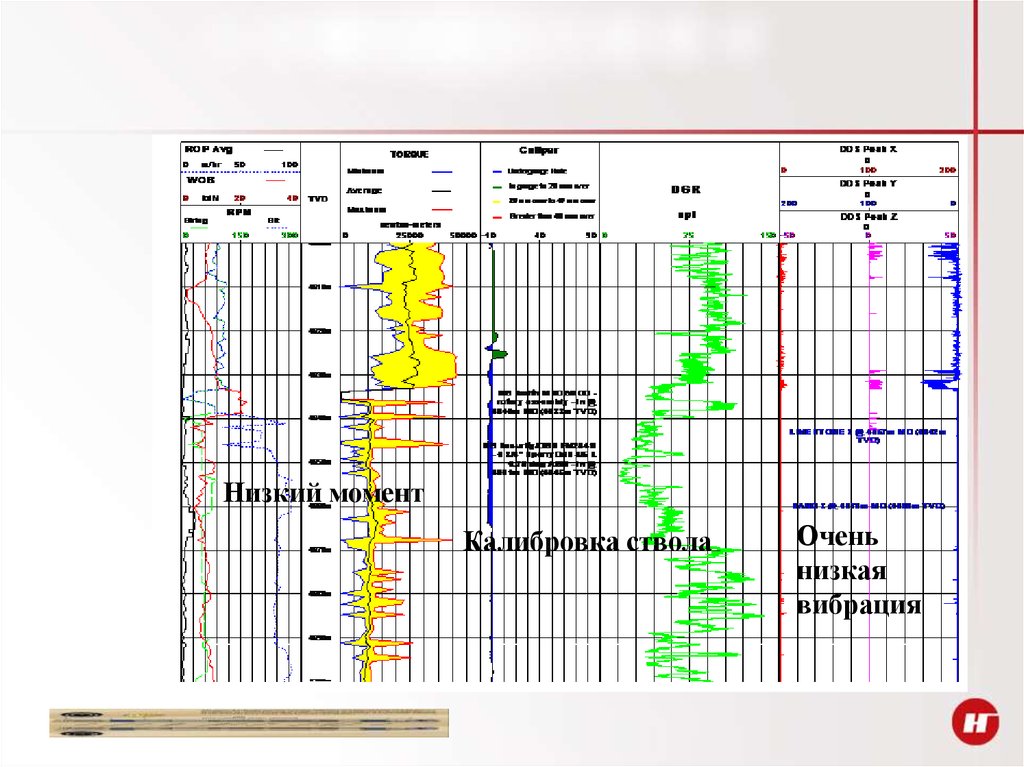
16.
Низкий моментКалибровка ствола
Очень
низкая
вибрация
17. Концепция роторной управляемой КНБК
Возможность вращения бурильной колонны 100% всего
времени
– Улучшается передача весовой нагрузки и механическая
скорость проходки
– Улучшается очистка ствола за счет постоянного
перемешивания выбуренной породы
Возможность ориентирования долота и бурения наклонно
направленной скважины
Цель: ОСУЩЕСТВЛЯТЬ ОТКЛОНЕНИЕ ДОЛОТА БЕЗ
УЧАСТИЯ В ЭТОМ БУРИЛЬНОЙ КОЛОННЫ
18. Основной принцип работы системы Geo-Pilot
Консольный подшипникВращающийся вал
отклоняется в
центре между
подшипниками с
двойными
эксцентриковыми
кулачками
Заставляет долото
наклоняться в
противоположном
направлении
Эксцентриковые кольца
Фокальный подшипник
Интервал перемещений
19.
Принцип действия Geo-Pilot заключается в отклонении вала между долотом ибурильной колонной. В невращающейся части кожуха содержится элегантное,
компактное и прочное отклоняющее устройство, передающее отклонение на
вал, обеспечивая постоянно контролируемое управление (как углом торца
бурильного инструмента, так и эффективным углом изгиба). Другими словами,
такой принцип действия позволяет (при вращающейся бурильной колонне)
изменять направление бурения на забое и темп набора кривизны.
Невращающийся наружный корпус
20. Роторная управляемая система Geo-Pilot™
21. Стабилизатор исходного состояния (подпружиненные ролики)
22. Отклонение вала эксцентриковыми кольцами
Буровой растворВнутреннее
эксцентриковое
кольцо
Опоры
Вал
Наружное
эксцентриковое кольцо
Кожух
Угол торца
бурильного
инструмента
(УТБИ)
23. Отклонение вала
Нейтральноеположение
Максимальное
отклонение
Промежуточное
отклонение
24. Описание системы
• Длина - 20 футов + 10 футов гибкая муфта• Угол наклона на долоте (ABI™) - 3 фута от
долота
• 6 из 8 электронных плат имеются в продаже
• Полная интеграция с системой LWD для
передачи данных в режиме реального
времени
• Сообщение с наземным оборудованием через
скорость вращения и последовательность
включений и выключений насоса
(двустороннее – 3 квартал 2000 г.).
25. Долото с длинной калибрующей частью
• За счет центровкидолота ствол
скважины
получается ровнее
• Разрушительные
толчки и вибрация
сводятся до
минимума
26. Коммуникативная последовательность
НасосыРЕЖИМ 1
Прямое положение
РЕЖИМ 2
Ориентированное
положение, тот
же УТБИ
РЕЖИМ 3
Ориентированно
е положение,
новый УТБИ
Вращение
Сначала начать вращение,
насосы вкл. через 20 сек.
НАСОСЫ
ВРАЩЕНИЕ
Сначала вкл. насосы,
вращение начать менее чем
через 1 минуту
Задать новый УТБИ
Сначала включить насосы,
вращение начать не менее
чем через 1 минуту
ВРЕМЯ (минуты)
27. Передача данных на Geo-Pilot
• Управление Geo-Pilot с поверхности также возможно спомощью импульсов, передаваемых по буровому
раствору.
• Импульсы, создаваемые в буровом растворе на стояке,
передают отрицательные импульсы.
• Прием сигналов на забое осуществляется с помощью
PWD.
• Низкая частота идущих с поверхности импульсов
позволяет одновременно осуществлять передачу
импульсов на поверхность с помощью NP или P4M.
28. Передача данных на Geo-Pilot (продолжение)
• Первые успешные полевые испытания системы передачиданных с поверхности с использованием Geo-Pilot
состоялись на испытательном полигоне в Катуза.
• Проводятся полевые испытания передачи данных с
поверхности без Geo-Pilot.
• Полная функциональность Geo-Pilot с наземным
управлением достигается при наличии программы INSITE
5.0 и обновленного программного обеспечения HCIM, PWD,
и Geo-Pilot.
29. Передатчик сигналов с поверхности, установленный на скиде
30. Первая скважина - Saga Norway
9,849 - 10,794 футов пробурено за 20 часов (945 футов при
скорости проходки 47 футов/час).
Оборудование использовалось для разбуривания цемента и
оборудования с обратным клапаном.
Последние 377 футов – попытка набрать кривизну – УТБИ
изменялся хаотически – бурение продолжалось, пока это было
возможно, но в конце концов оборудование было поднято на
поверхность.
Вращение кожуха: в среднем 1 оборот в час, максимум 2 об/час
При анализе был обнаружен выход из строя уплотнения
вращательного соединения в результате скачка давления
31. Вторая скважина - Spirit Energy 76
1-йспуск
4507
футов
2-1
спуск
1120
футов
3330 футов – 9006 футов
Всего 5676 футов за 2 спуска
Начальный наклон- 33°
Потеря 2.5°/100 футов при
повороте на 182° и снова набор
зенитного угла до 55° со
скоростью 3°/100 футов
Система бурового раствора на
углеводородной основе
До выхода из строя оборудование
работало безукоризненно
32. Готово к спуску
33.
34. Долото с длинной калибрующей частью
• Алмазное (PDC) долотоFM2643 компании
SecurityDBS
– 6 - лопастное
– DART, с низким крутящим
моментом
– Защита калибровочной
части 10.5”
35.
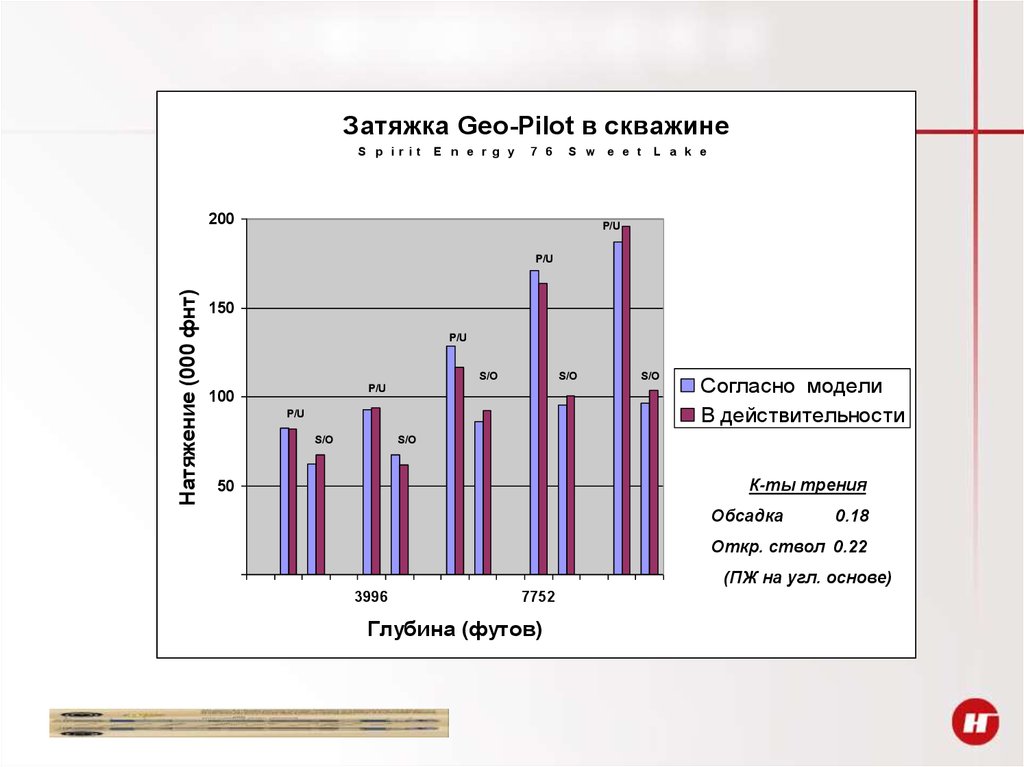
Затяжка Geo-Pilot в скважинеS p ir it E n e r g y
7 6
S w
200
e e t L a k e
P/U
Натяжение (000 фнт)
P/U
150
P/U
S/O
S/O
P/U
100
P/U
S/O
S/O
Согласно модели
В действительности
S/O
К-ты трения
50
Обсадка
0.18
Откр. ствол 0.22
(ПЖ на угл. основе)
3996
7752
Глубина (футов)
36.
Крутящий момент Geo-PilotS p ir it E n e r g y 7 6
S w e e t L a k e
Кр. момент (000 фтн*фт)
10
9
8
7
6
Согласно модели
В действительности
5
4
3
2
1
3369
3996
5592
Глубина (футы)
7752
8661
37. Tool Teardown Preliminary Findings
Рекорд, установленный с помощьюGeo-Pilot (август 2000)
TM
Проходка (футов)
5000
4000
• 24 спуска на сегодняшний день
• Пробурено 7151 м / 23,461 футов
3000
• 5 существенных поломок
• Основная трудность при
обеспечении долговечности
заключается в чрезмерных
потерях масла
2000
1000
0
Спуски
Note: Terra Nova project not included in footage figures
• Испытания наземного управления
в Катуза прошли исключительно
успешно
38. Subsequent Runs
Проект Maersk Halfdan 6 вСеверном море
Конструкция скважины
10934
10335
9735
9136
8536
7937
7338
6738
6138
5539
4939
4340
3740
3141
2541
1941
1344
777.7
317.5
-23.8
-213.3
-253.3
-256.6
-231.1
-183
-124.3
-78.67
-60.23
-19.34
-5.4
0
Вертикальная секция
0
2000
Глубина по вертикали
8-1/2” SDBS
Серия ‘X’
со втулкой
10 дюймов
3383 футов за 41 часов
1724 футов в режиме«отклонения долота"
82.5 футов/час в среднем
150 футов/час максимум
Макс. искривление ствола 3 град./100 футов
Управление бурением в тонком пористом
пласте толщиной 3-4 фута
ПЖ: 11.9 ф/галл, KCl полимер
1000
3000
4000
5000
13 3/8" обсадка
@ 4650' п о ствол у
6000
Sperry бурение с AGS
Geo-Pilot
7000
9 5/8" обсадка
@ 8246' п о ствол у
8000
@ 15080' по ИГ @18463' по
ствол у
ствол у
39. Рекорд, установленный с помощью Geo-PilotTM (август 2000)
Коэффициенты трения прииспользовании Geo-Pilot в
скважине Maersk Halfdan 6
Вверх (все веса в тыс.фнт-с)
Глубина Наклон
ф у ты
гр а д .
Факт.
Рассч.
8411
77
155
164
174
11242
88
195
192
11952
88
195
12385
88
12996
к = 0 .1 к = 0 .2
Разгрузка (все веса в тыс.фнт-с)
Р а с с ч . к .т р .
Ф а к т.
Рассч.
к = 0 .1
к = 0 .2
175
0 .1 0
105
114
120
119
178
187
0 .2 6
105
102
113
106
191
178
189
0 .2 2
75
71
112
103
195
192
181
192
0 .2 0
75
72
112
103
91
205
207
181
194
0 .2 9
85
87
110
99
14114
90
205
207
185
201
0 .2 3
75
77
108
95
15214
90
215
228
237
238
0 .0 0
55
68
73
71
Обычная КНБК – в стволе 8-1/2”
Средний к-т трения - 0.30
КНБК Geo-Pilot – в стволе 8-1/2”
Средний к-т трения - 0.11
40. Проект Maersk Halfdan 6 в Северном море
Изображение закрученного в спираль ствола скважиныпри бурении обычной КНБК, полученное с помощью
прибора акустического сканирования CAST
41. Коэффициенты трения при использовании Geo-Pilot в скважине Maersk Halfdan 6
STATOIL NORNE- Пробурено
3570 футов без
поломки
- Triple Combo с
PWD
42. Изображение закрученного в спираль ствола скважины при бурении обычной КНБК, полученное с помощью прибора акустического сканирования CAST
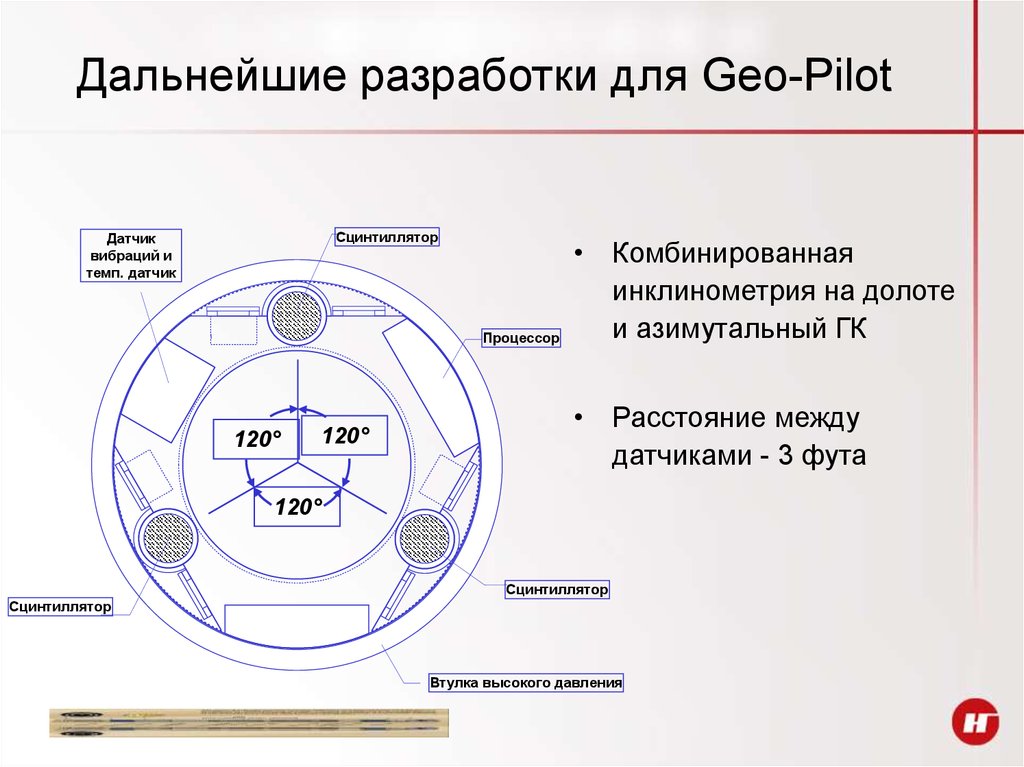
Дальнейшие разработки для Geo-Pilot• Конструкция с
использованием
смотрящей вверх
муфты обеспечивает
наличие места для
установки приборов
• В настоящее время
испытывается на
устойчивость к
температуре и
вибрации (2 долота)
43.
Дальнейшие разработки для Geo-PilotСцинтиллятор
Датчик
вибраций и
темп. датчик
Процессор
120°
120°
• Комбинированная
инклинометрия на долоте
и азимутальный ГК
• Расстояние между
датчиками - 3 фута
120°
Сцинтиллятор
Сцинтиллятор
Втулка высокого давления
44. Дальнейшие разработки для Geo-Pilot
Управление в небольших залежах врежиме реального времени
Обзор технологий
май 2002 г.
45. Дальнейшие разработки для Geo-Pilot
Максимальное вскрытие пласта впродуктивном интервале
Нефть
Water
Oil
Water Saturation
Well Path
Водонасыщенность
Neutron Porosity
Resistivity
DGR™
Gamma Ray
100
(AAPI)
0
ROP
0 2
(ft/hr)
500
0
DGR™
Gamma Ray
100
(AAPI)
Water
Saturation
EWR®
CNf®
SW
Resistivity
Neutron Porosity
200 42
(Ohm-m)
(LS pu)
-18 1 % 0
Вода
Rate of
Peneteration
Gamma Ray
X00
TVD
(FT)
Zone A
X50
Zone B
X000
Measured Depth (Ft)
Well Path
X500
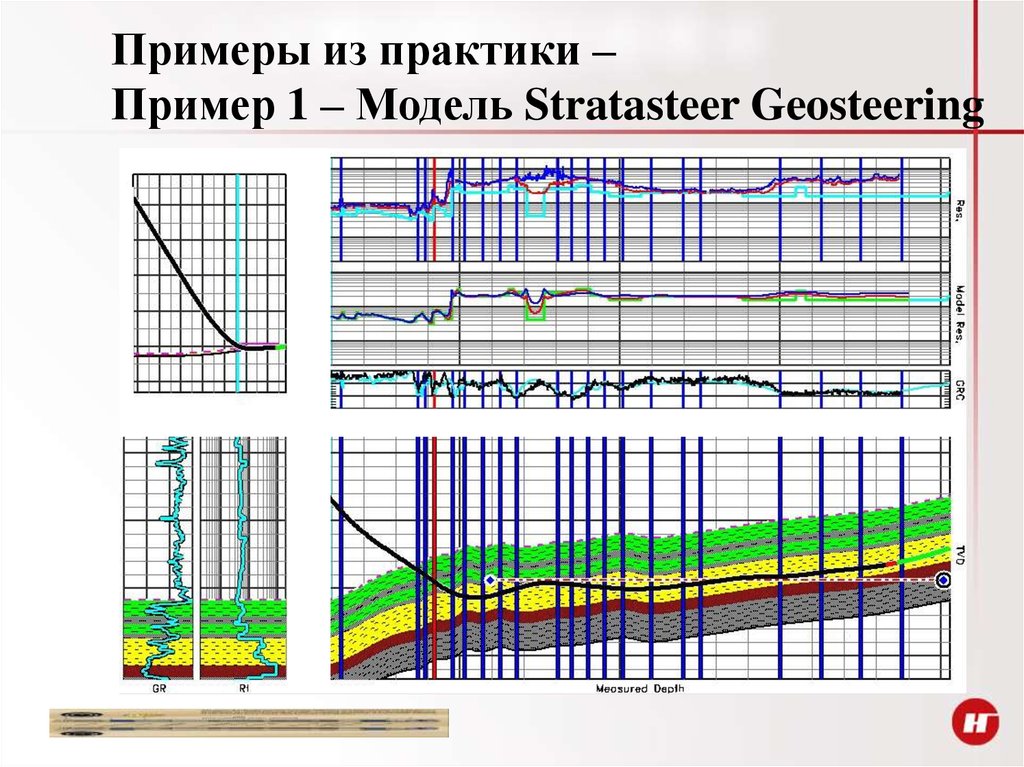
46.
Примеры из практики –Пример 1 – Модель Stratasteer Geosteering
47.
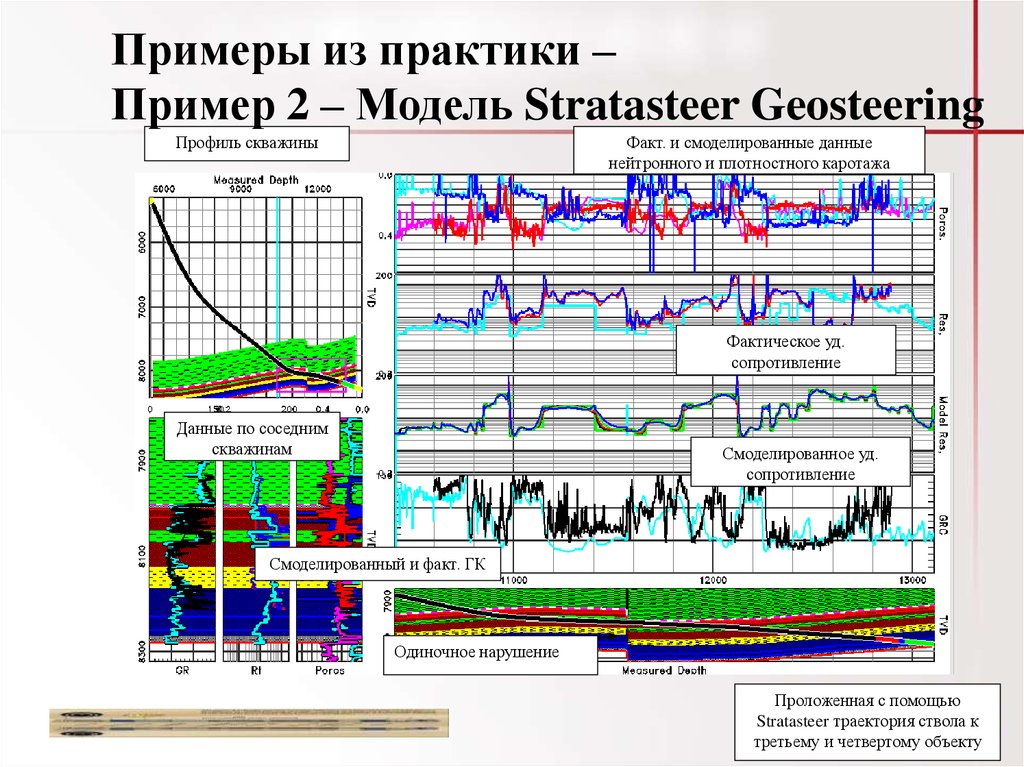
Примеры из практики –Пример 2 – Модель Stratasteer Geosteering
Профиль скважины
Факт. и смоделированные данные
нейтронного и плотностного каротажа
Фактическое уд.
сопротивление
Данные по соседним
скважинам
Смоделированное уд.
сопротивление
Смоделированный и факт. ГК
Одиночное нарушение
Проложенная с помощью
Stratasteer траектория ствола к
третьему и четвертому объекту
48.
Примеры из практики –Пример 3 – Модель Stratasteer Geosteering