





 mechanics
mechanicsSimilar presentations:










Рабочие циклы пневмоприводов
1. РАБОЧИЕ ЦИКЛЫ ПНЕВМОПРИВОДОВ
(лекции и примеры)2. РАБОЧИЕ ЦИКЛЫ ПНЕВМОПРИВОДОВ
Управление циклами в установках пневмоприводаУстановки пневмоприводов обычно являются автоматизированными,
реализующими
определенные
рабочие
циклы.
По
характеру
автоматического управления и типу функционально-операционной схемы
УПП подразделяются на установки:
- с контролем и регулированием по координате рабочего органа;
- с контролем и регулированием системы по давлению (нагрузке);
- с контролем по выдержке во времени.
3.
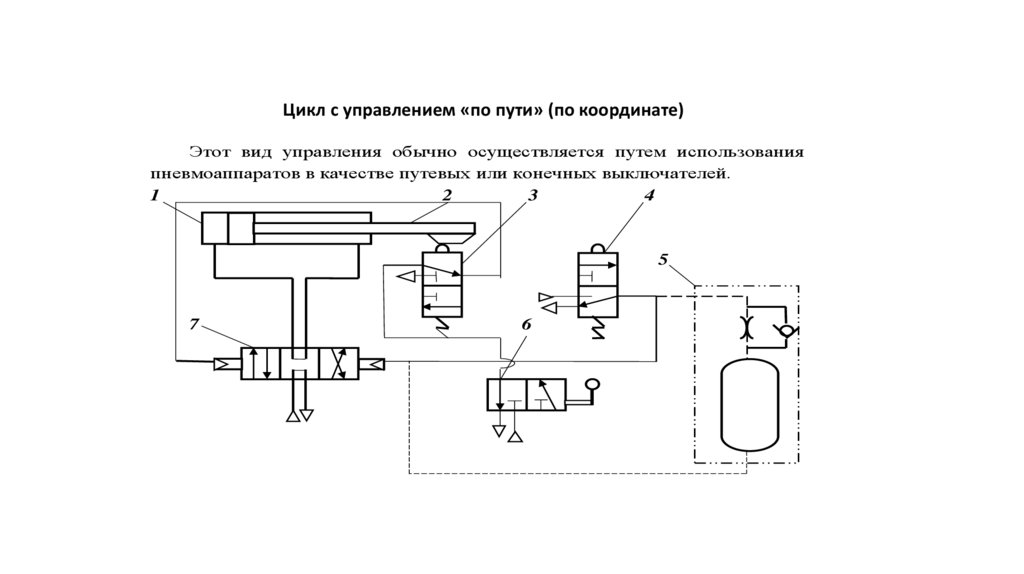
Цикл с управлением «по пути» (по координате)Управление УПП по координате рабочего органа
Этот вид управления обычно осуществляется путем использования
пневмоаппаратов в качестве путевых или конечных выключателей.
1
2
3
4
5
7
6
Рис.6.1. Схема УПП с управлением по координате рабочего органа
4.
На рис.6.1 дана схема установки пневмопривода, в которой в качествепутевых выключателей используются пневмораспределители 3 и 4 типа 3/2
с механическим управлением.В начальном положении штока 2
распределитель 3 нажат выступом, и при включении тумблера 6 газ подается
к пневмораспределителю 7 и переключает его в левую позиицию. Газ
поступает в силовой цилиндр 1, шток выдвигается, освобождая
переключатель 3. Рабочий ход продолжается до тех пор, пока выступ штока
не надавит на переключатель 4, в результате чего начнется обратный ход
поршня. Если в крайнем правом положении штока требуется выдержка во
времени, в схему подключается клапан выдержки 5.
5.
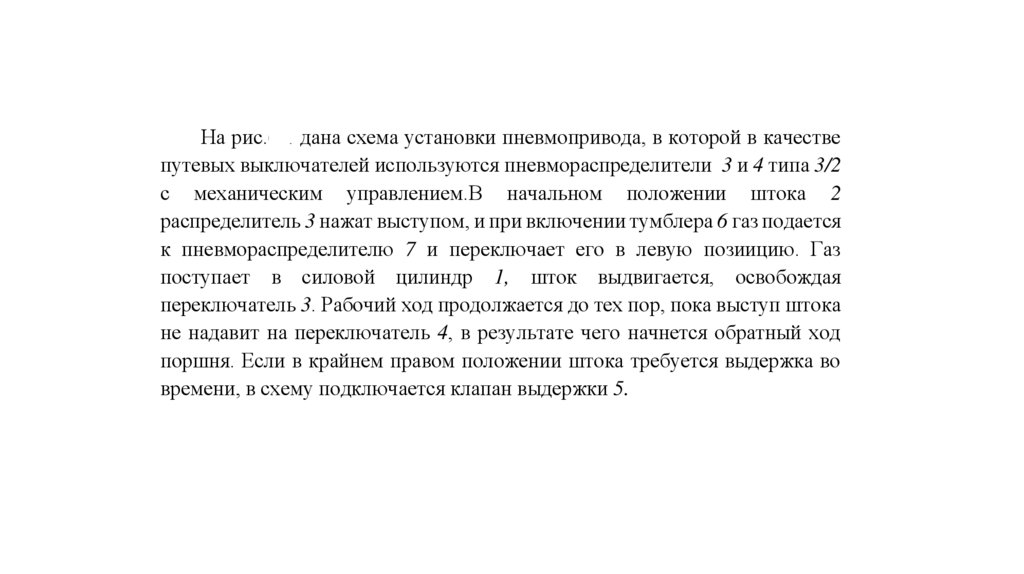
Двухскоростные циклы выполняются в установках пневмоприводатакже путем переключения – с помощью концевых выключателей и
электромагнитов. На рис. 6.2 дана схема, в которой изменение скорости
поршня 4 происходит при нажатии выступом штока на распределитель 3.
4
ВК1
БП
РХ
ВК2
3
1
Э1
а
б
Э2
5
2
Рис.6.2. Схема УПП с двухскоростным циклом
Быстрый подвод поршня производится при полной подаче из линии
нагнетания, рабочий ход – при выходе газа из штоковой полости через
дроссель 2. Главный распределитель 1 при этом находится в поз. «а»; при
переводе его с помощью электромагнита Э2 в поз. «б» осуществляется
обратный ход поршня.
6.
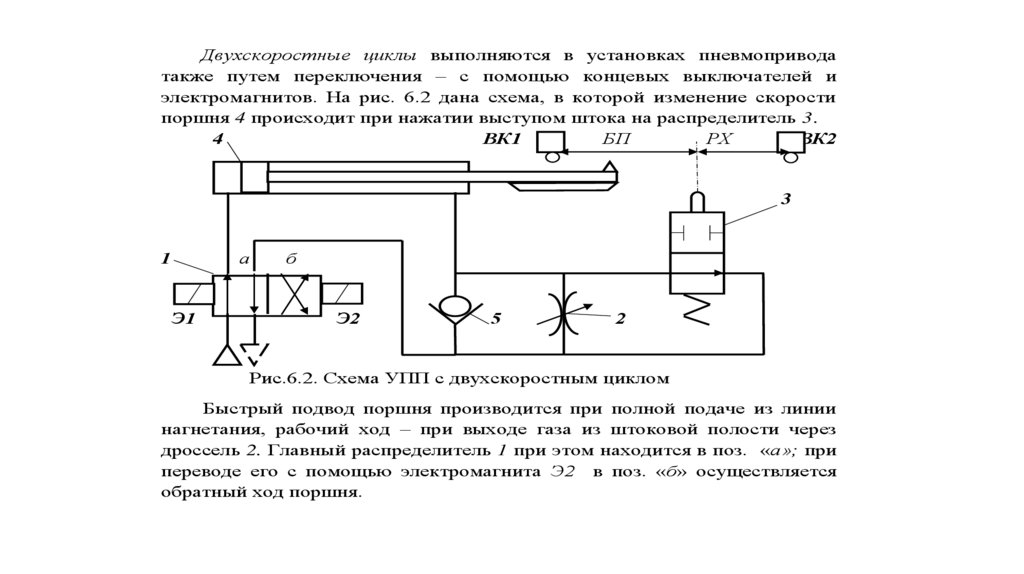
Управление циклами «по давлению»Данный тип управления применяется в следующих случаях: а – реверс
движения рабочего органа требуется осуществить при достижении заданной
величины давления в системе (например, в зажимных или прессовых
устройствах); б – управление «по координате» неосуществимо из-за
малости хода выходного звена двигателя; в – длина хода выходного звена
не постоянна и может быть разной в зависимости от технологической
операции.
1
2
3
4
5
Рис.6.3. Схема УПП
с триггером
В качестве управляющих элементов используются клапаны давления и
реле давления, обычно в сочетании с реле выдержки во времени.
7.
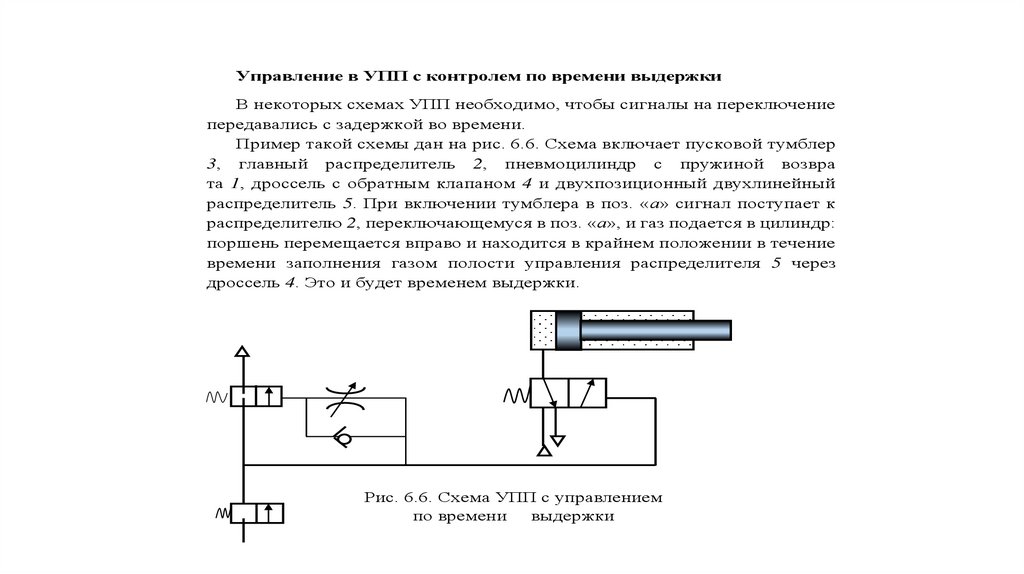
Управление в УПП с контролем по времени выдержкиВ некоторых схемах УПП необходимо, чтобы сигналы на переключение
передавались с задержкой во времени.
Пример такой схемы дан на рис. 6.6. Схема включает пусковой тумблер
3, главный распределитель 2, пневмоцилиндр с пружиной возвра
та 1, дроссель с обратным клапаном 4 и двухпозиционный двухлинейный
распределитель 5. При включении тумблера в поз. «а» сигнал поступает к
распределителю 2, переключающемуся в поз. «а», и газ подается в цилиндр:
поршень перемещается вправо и находится в крайнем положении в течение
времени заполнения газом полости управления распределителя 5 через
дроссель 4. Это и будет временем выдержки.
Рис. 6.6. Схема УПП с управлением
по времени
выдержки
8. МНОГОДВИГАТЕЛЬНЫЕ ГИДРОПНЕВМОПРИВОДЫ
Многодвигательный гидропривод (МДГП) – это совокупность несколькиходнодвигательных гидропередач, выполняющих последовательно или
одновременно сложный технологический цикл. МДГП можно рассматривать
как сложную систему, состоящую из нескольких подсистем,
функционирующих в рамках единого рабочего цикла, и эти подсистемы
являются частными операционными гидросхемами, выполняющими
конкретные операции в общем рабочем цикле. Эти частные операции –
необходимые звенья в общей последовательности операций, составляющих
полный рабочий цикл ОГП машины.
Итак,
- МДГП – это многооперационная гидросистема, состоящая из частных,
типовых подсистем, выполняющих заданную (запрограммированную)
совокупность рабочих циклов посредством определенных операционных
гидросхем управления.
9.
1.1.1. Управление включением гидродвигателей МДГП «по пути»Проанализируем особенности применения данного принципа в МДГП с
последовательным действием нескольких гидродвигателей.
1. Простейшим примером использования названного способа является
переключение гидрораспределителя в разные позиции механическим упором,
закрепленным на выходном органе ГЦ (рис. 4.1).
I
II
Рис. 4.1. Схема последовательного включения
гидроцилиндров «по пути»
2
1
II
I
3
6
а
4
5
о
б
а
б
10.
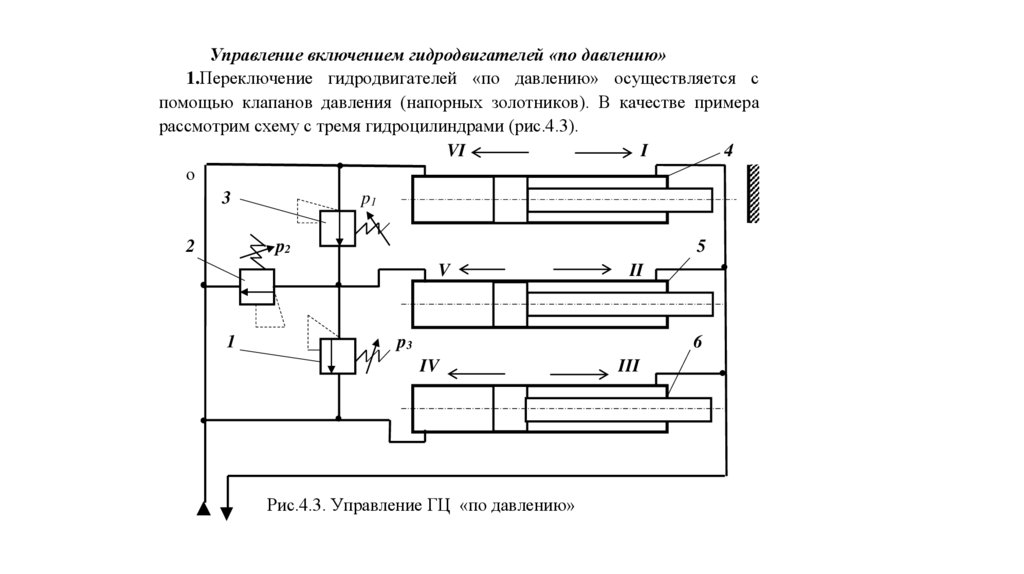
Управление включением гидродвигателей «по давлению»1.Переключение гидродвигателей «по давлению» осуществляется с
помощью клапанов давления (напорных золотников). В качестве примера
рассмотрим схему с тремя гидроцилиндрами (рис.4.3).
VI
I
4
о
3
p1
2
p2
5
V
1
II
p3
6
IV
Рис.4.3. Управление ГЦ «по давлению»
III
11.
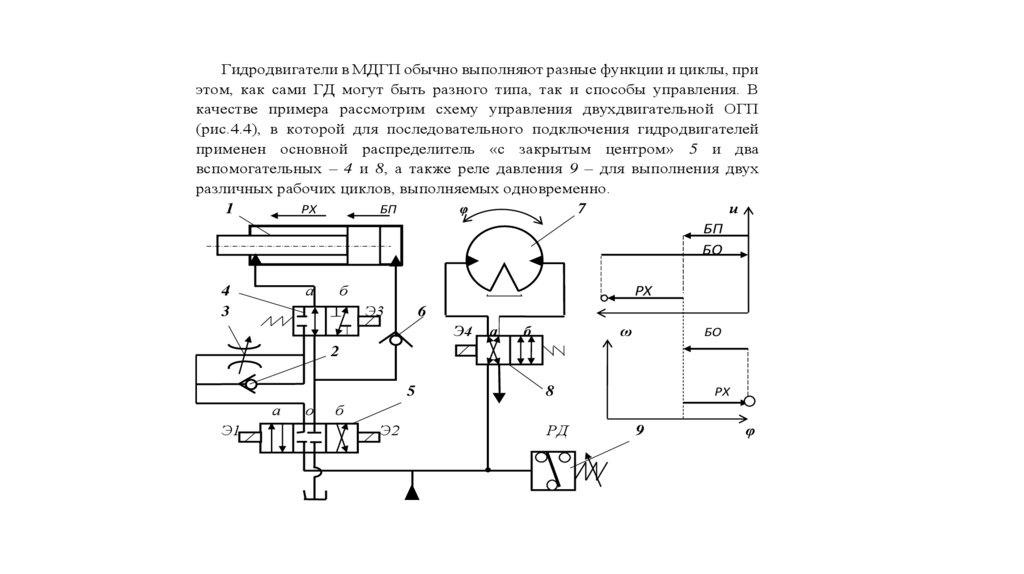
Гидродвигатели в МДГП обычно выполняют разные функции и циклы, приэтом, как сами ГД могут быть разного типа, так и способы управления. В
качестве примера рассмотрим схему управления двухдвигательной ОГП
(рис.4.4), в которой для последовательного подключения гидродвигателей
применен основной распределитель «с закрытым центром» 5 и два
вспомогательных – 4 и 8, а также реле давления 9 – для выполнения двух
различных рабочих циклов, выполняемых одновременно.
1
РХ
БП
φ
7
и
БП
БО
а
4
3
б
РХ
Э3
6
Э4
а
б
ω
БО
2
5
а
Э1
о
8
РХ
б
Э2
РД
9
φ
12.
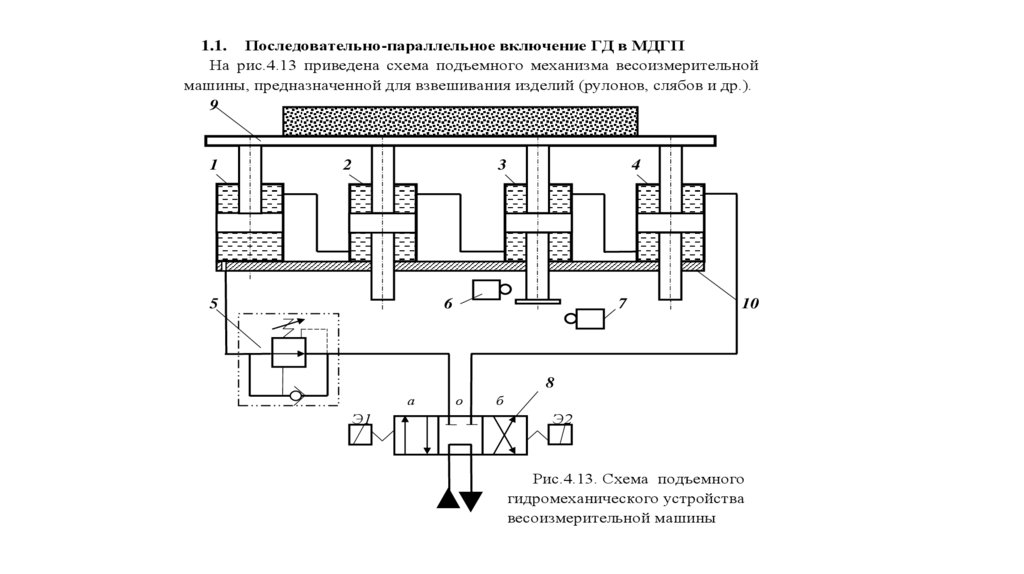
1.1. Последовательно-параллельное включение ГД в МДГПНа рис.4.13 приведена схема подъемного механизма весоизмерительной
машины, предназначенной для взвешивания изделий (рулонов, слябов и др.).
9
1
2
3
5
4
6
7
10
8
а
Э1
о
б
Э2
Рис.4.13. Схема подъемного
гидромеханического устройства
весоизмерительной машины
13. Гидроприводы многодвигательных машин и комплексов
1. Рассмотрим систему, включающую три основных типа гидродвигателей(рис.4.18): гидромотора 2, поворотного ГД 3 и двух плунжерных цилиндров 4.
2
3
4
5
1
7
9
6
8
Рис.4.18. Схема трехдвигательной ОГП
14.
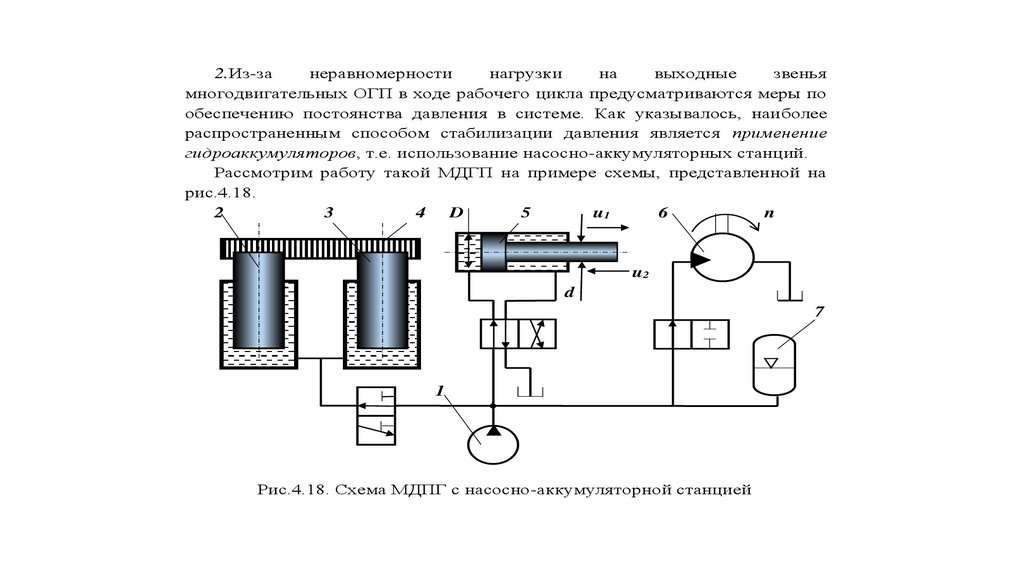
2.Из-занеравномерности
нагрузки
на
выходные
звенья
многодвигательных ОГП в ходе рабочего цикла предусматриваются меры по
обеспечению постоянства давления в системе. Как указывалось, наиболее
распространенным способом стабилизации давления является применение
гидроаккумуляторов, т.е. использование насосно-аккумуляторных станций.
Рассмотрим работу такой МДГП на примере схемы, представленной на
рис.4.18.
2
3
4
D
5
u1
6
n
u2
d
7
1
Рис.4.18. Схема МДПГ с насосно-аккумуляторной станцией
15. Литература по теме
1. Дорошенко В.А. Объемный гидро- и пневмопривод: учебное пособие. Изд-во Уральскогоуниверситета, 2019, глава 6, с. 122 – 144, глава 8, с. 159 – 163.