



 electronics
electronicsSimilar presentations:




")





Типовые статические нагрузки электропривода. Статическая устойчивость
1. Типовые статические нагрузки электропривода. Статическая устойчивость. Электромеханические и механические характеристики
двигателей постоянного тока независимоговозбуждения
2.
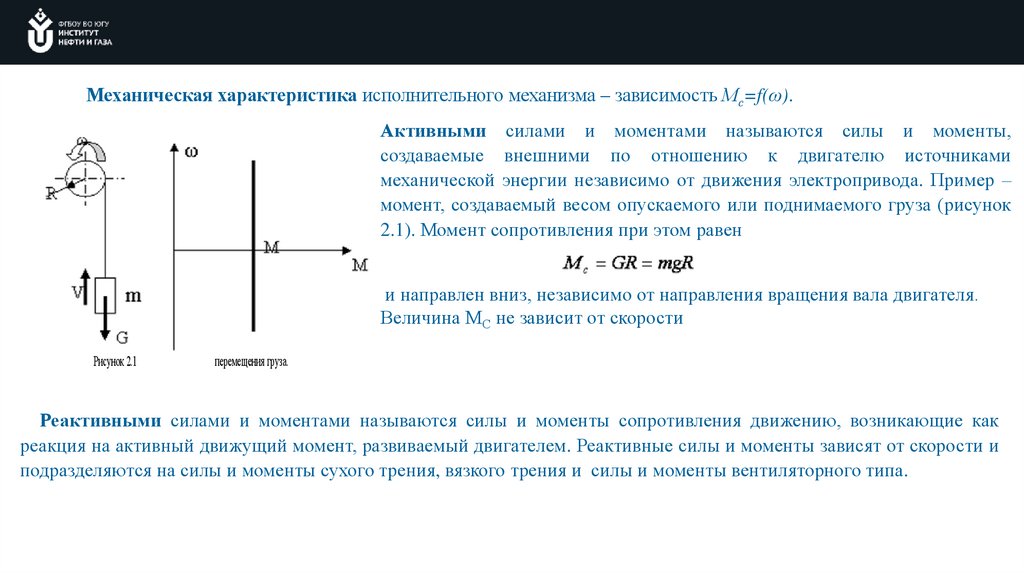
Механическая характеристика исполнительного механизма – зависимость Мс=f(ω).Активными силами и моментами называются силы и моменты,
создаваемые внешними по отношению к двигателю источниками
механической энергии независимо от движения электропривода. Пример –
момент, создаваемый весом опускаемого или поднимаемого груза (рисунок
2.1). Момент сопротивления при этом равен
и направлен вниз, независимо от направления вращения вала двигателя.
Величина МС не зависит от скорости
Рисунок 2.1
перемещения груза.
Реактивными силами и моментами называются силы и моменты сопротивления движению, возникающие как
реакция на активный движущий момент, развиваемый двигателем. Реактивные силы и моменты зависят от скорости и
подразделяются на силы и моменты сухого трения, вязкого трения и силы и моменты вентиляторного типа.
3.
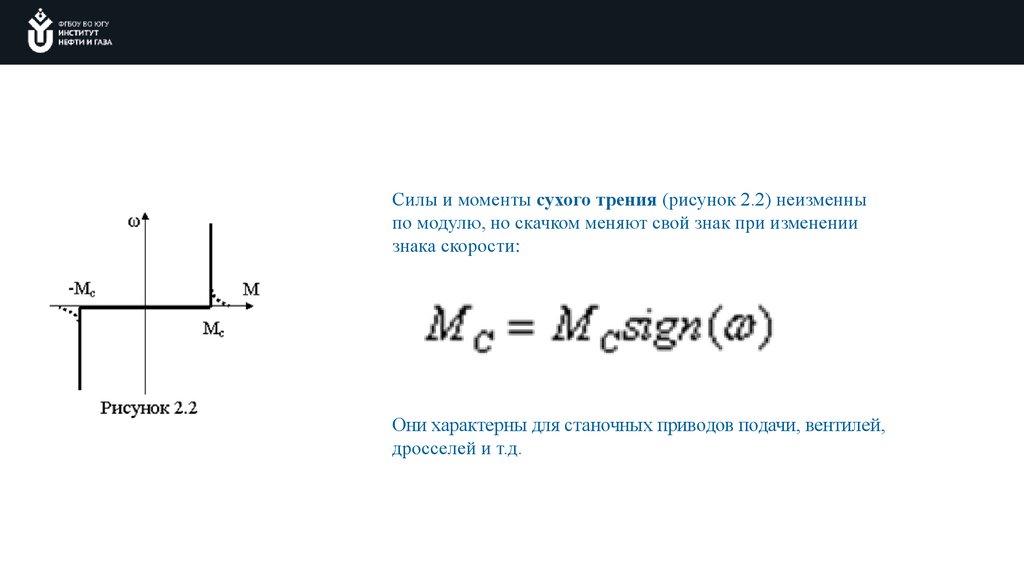
Силы и моменты сухого трения (рисунок 2.2) неизменныпо модулю, но скачком меняют свой знак при изменении
знака скорости:
Они характерны для станочных приводов подачи, вентилей,
дросселей и т.д.
4.
На рисунке 2.3 изображен нагрузочный момент вязкоготрения, характеризующийся линейной (или близкой к ней)
зависимостью величины от скорости -
5.
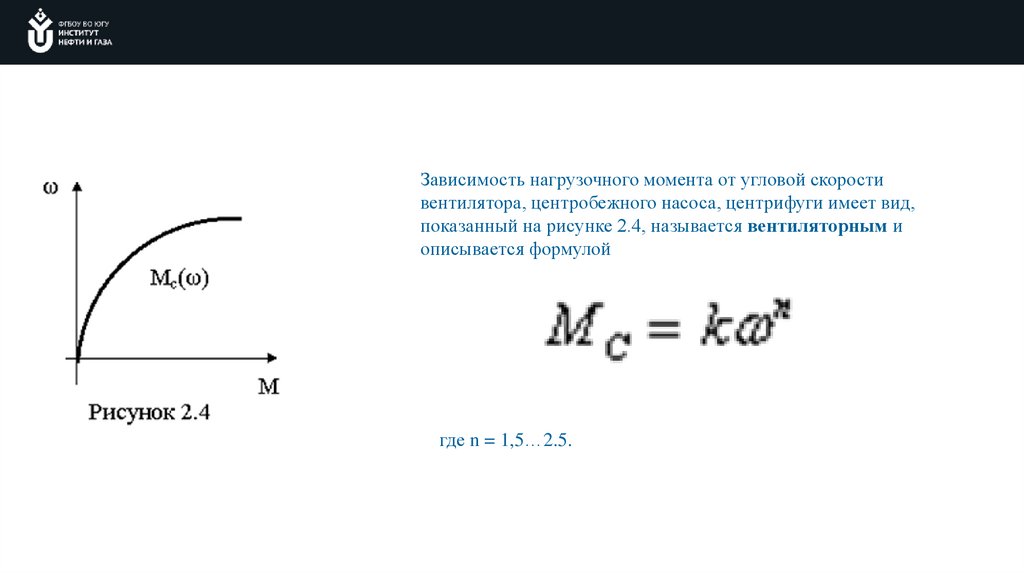
Зависимость нагрузочного момента от угловой скоростивентилятора, центробежного насоса, центрифуги имеет вид,
показанный на рисунке 2.4, называется вентиляторным и
описывается формулой
где n = 1,5…2.5.
6.
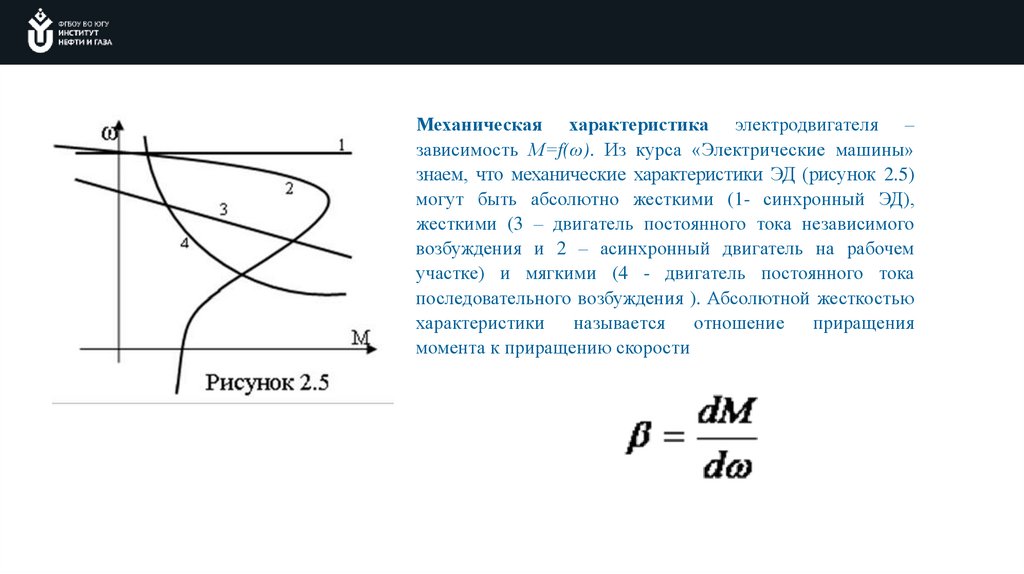
Механическая характеристика электродвигателя –зависимость М=f(ω). Из курса «Электрические машины»
знаем, что механические характеристики ЭД (рисунок 2.5)
могут быть абсолютно жесткими (1- синхронный ЭД),
жесткими (3 – двигатель постоянного тока независимого
возбуждения и 2 – асинхронный двигатель на рабочем
участке) и мягкими (4 - двигатель постоянного тока
последовательного возбуждения ). Абсолютной жесткостью
характеристики называется отношение приращения
момента к приращению скорости
7.
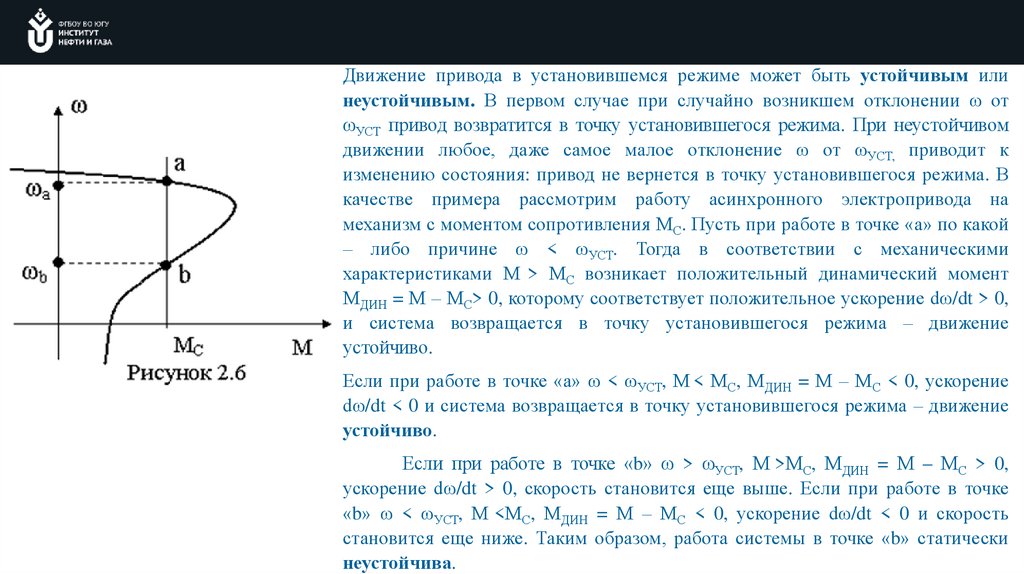
Движение привода в установившемся режиме может быть устойчивым илинеустойчивым. В первом случае при случайно возникшем отклонении ω от
ωУСТ привод возвратится в точку установившегося режима. При неустойчивом
движении любое, даже самое малое отклонение ω от ωУСТ, приводит к
изменению состояния: привод не вернется в точку установившегося режима. В
качестве примера рассмотрим работу асинхронного электропривода на
механизм с моментом сопротивления МС. Пусть при работе в точке «а» по какой
– либо причине ω < ωУСТ. Тогда в соответствии с механическими
характеристиками М > МС возникает положительный динамический момент
МДИН = М – МС> 0, которому соответствует положительное ускорение dω/dt > 0,
и система возвращается в точку установившегося режима – движение
устойчиво.
Если при работе в точке «а» ω < ωУСТ, М < МС, МДИН = М – МС < 0, ускорение
dω/dt < 0 и система возвращается в точку установившегося режима – движение
устойчиво.
Если при работе в точке «b» ω > ωУСТ, М >МС, МДИН = М – МС > 0,
ускорение dω/dt > 0, скорость становится еще выше. Если при работе в точке
«b» ω < ωУСТ, М <МС, МДИН = М – МС < 0, ускорение dω/dt < 0 и скорость
становится еще ниже. Таким образом, работа системы в точке «b» статически
неустойчива.
8.
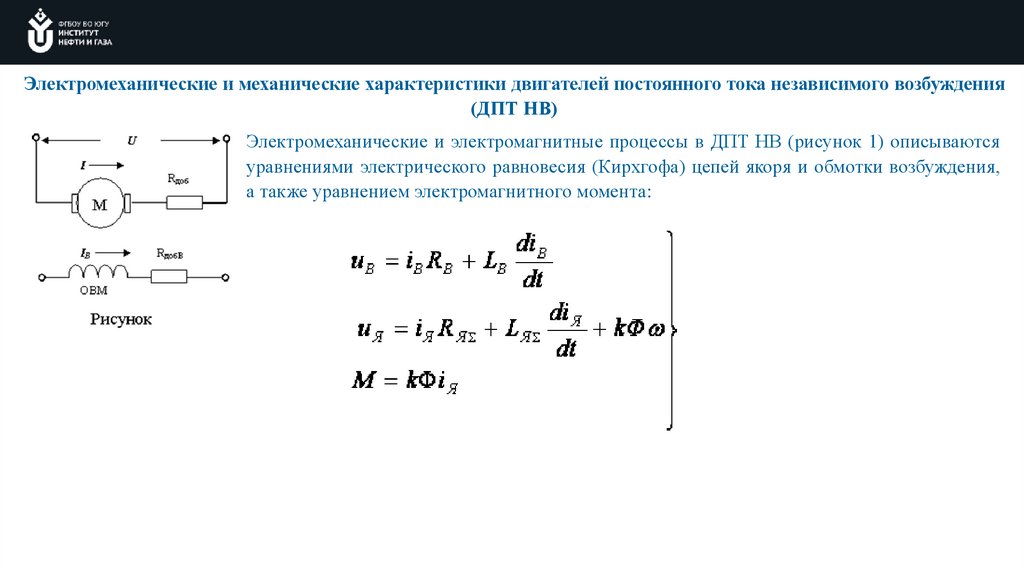
Электромеханические и механические характеристики двигателей постоянного тока независимого возбуждения(ДПТ НВ)
Электромеханические и электромагнитные процессы в ДПТ НВ (рисунок 1) описываются
уравнениями электрического равновесия (Кирхгофа) цепей якоря и обмотки возбуждения,
а также уравнением электромагнитного момента:
9.
Из совместного решения системы уравнений получаем уравнение электромеханической характеристики ω = f(I)и уравнение механической характеристики ω = f(M)
В установившемся режиме работы привода
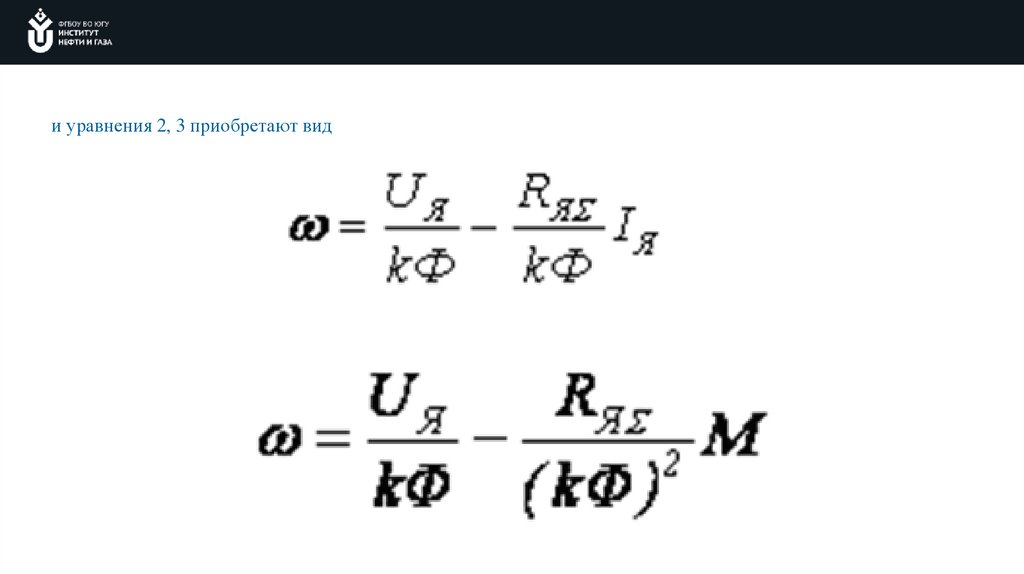
10.
и уравнения 2, 3 приобретают вид11.
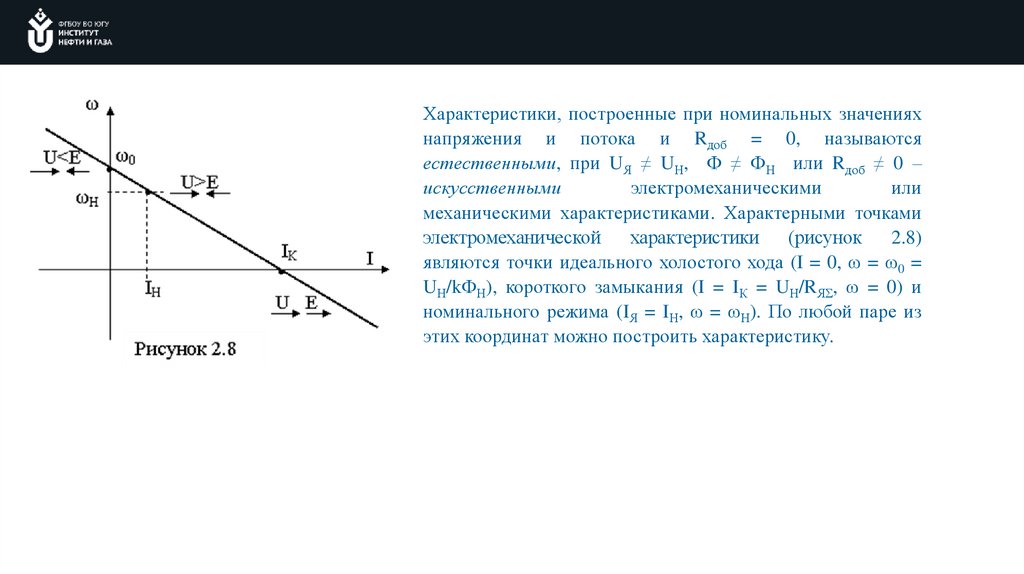
Характеристики, построенные при номинальных значенияхнапряжения и потока и Rдоб = 0, называются
естественными, при UЯ ≠ UН, Ф ≠ ФН или Rдоб ≠ 0 –
искусственными
электромеханическими
или
механическими характеристиками. Характерными точками
электромеханической
характеристики
(рисунок
2.8)
являются точки идеального холостого хода (I = 0, ω = ω0 =
UН/kФН), короткого замыкания (I = IК = UН/RЯΣ, ω = 0) и
номинального режима (IЯ = IН, ω = ωН). По любой паре из
этих координат можно построить характеристику.
12.
Используя введенные значения жесткости характеристикможно записать следующие выражения для электромеханических и механических характеристик:
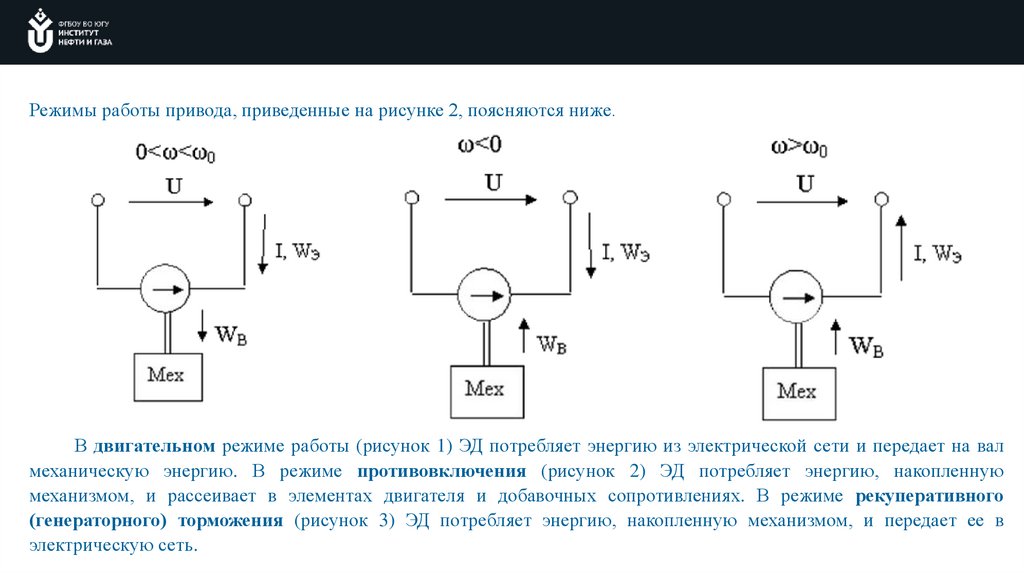
13.
Режимы работы привода, приведенные на рисунке 2, поясняются ниже.В двигательном режиме работы (рисунок 1) ЭД потребляет энергию из электрической сети и передает на вал
механическую энергию. В режиме противовключения (рисунок 2) ЭД потребляет энергию, накопленную
механизмом, и рассеивает в элементах двигателя и добавочных сопротивлениях. В режиме рекуперативного
(генераторного) торможения (рисунок 3) ЭД потребляет энергию, накопленную механизмом, и передает ее в
электрическую сеть.