





")
")
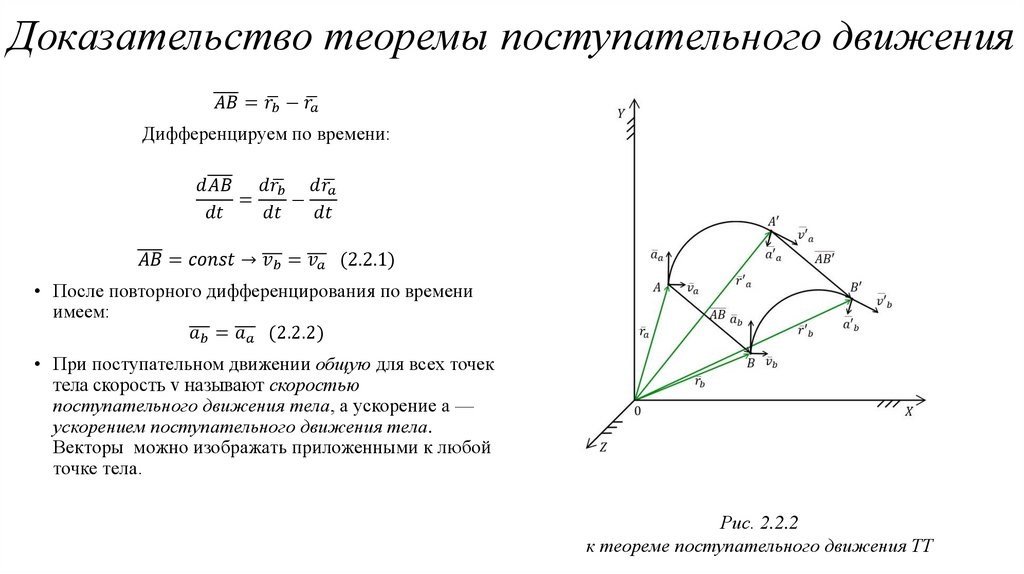
: Проекции скоростей двух ∀ точек ТТ на отрезок, соединяющий их,")




")
")

















")
")
")


 mechanics
mechanicsSimilar presentations:







")


Теория механизмов и машин
1. Теория Механизмов и Машин
Выполнили студенты группы РК6-44Б третьей бригады:Ватутин, Тетерин, Готовцев, Исраелян, Оганесян, Момотов, Власенков
2. Оглавление
Кинематика точки.Дифференцирование вектора постоянного модуля…………………………………………………………………………….……………………..3
Кинематика точки в декартовой системе координат.……………………………………………………………………………………………...9
Кинематика точки в прямоугольной системе координат ………………………………………………………………………………….……..13
Кинематика точки в естественной системе координат ……………………………………………………………………...………………....16
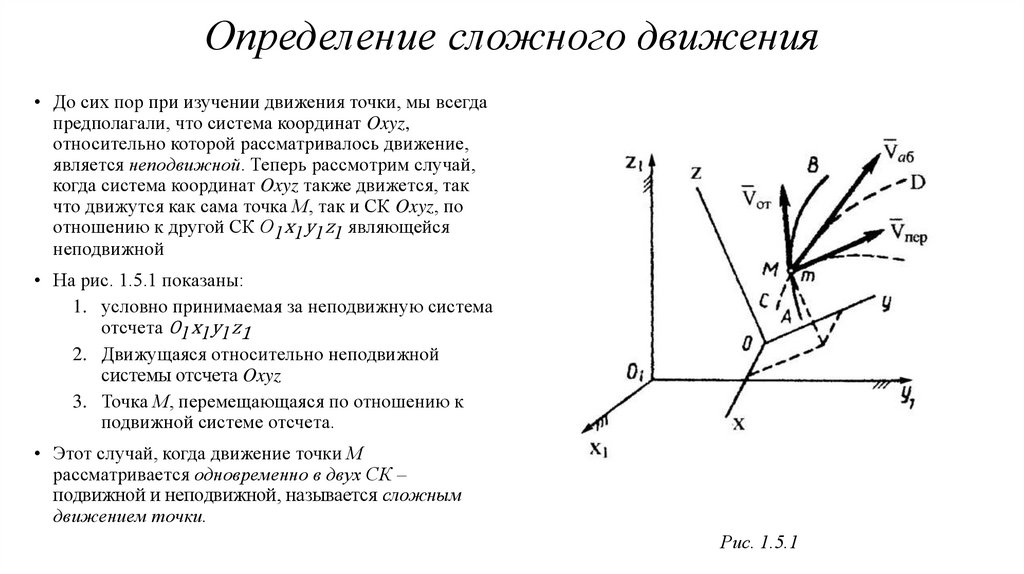
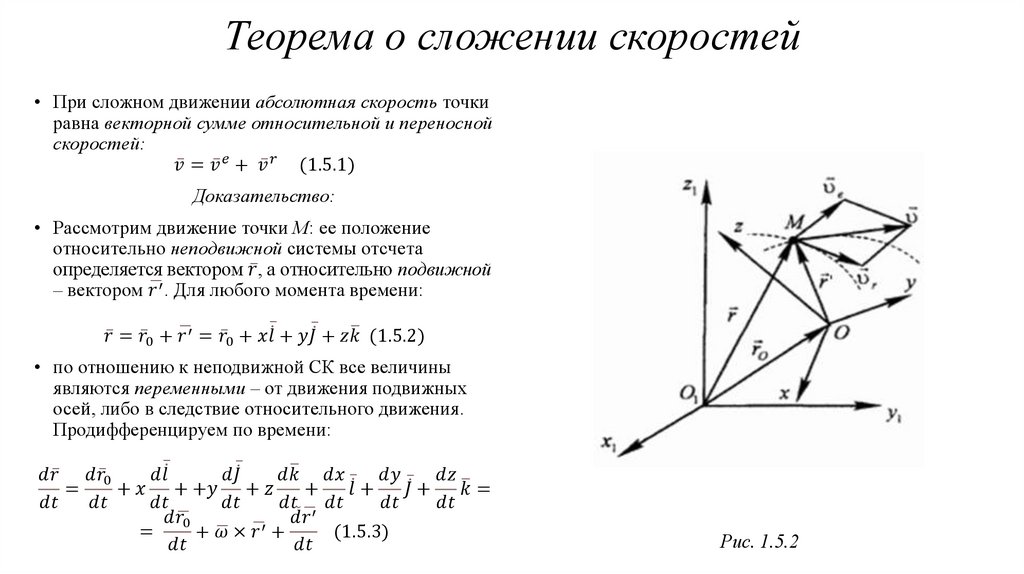
Сложное движение точки…………………………………………………………………………………………………….……...…………………..21
Кинематика твёрдого тела. Теория механизмов и машин.
Кинематика твёрдого тела……………………………………………………………………………………………………………...……………...27
Поступательное движение твёрдого тела…………………………………………………………………………………..………………………29
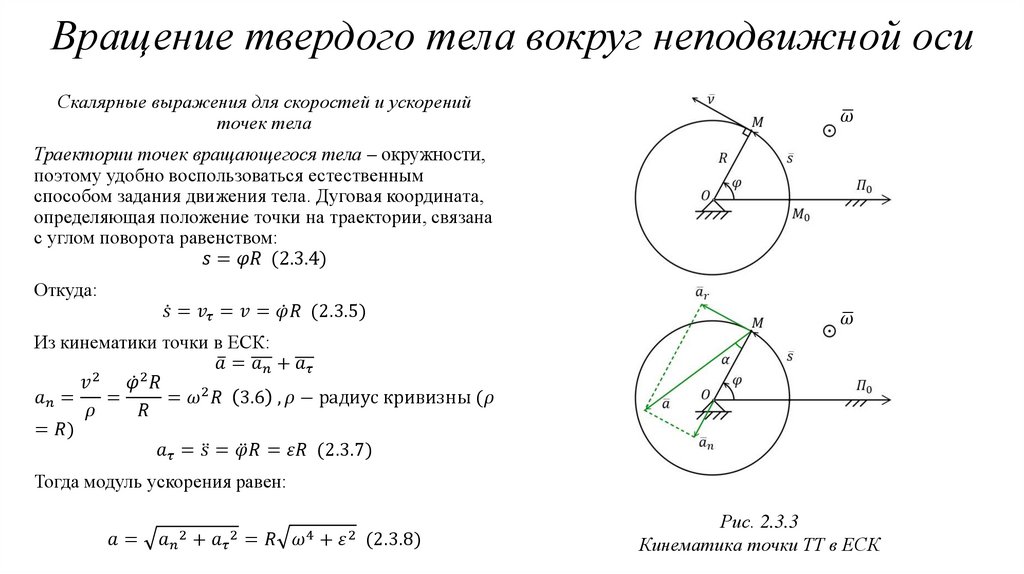
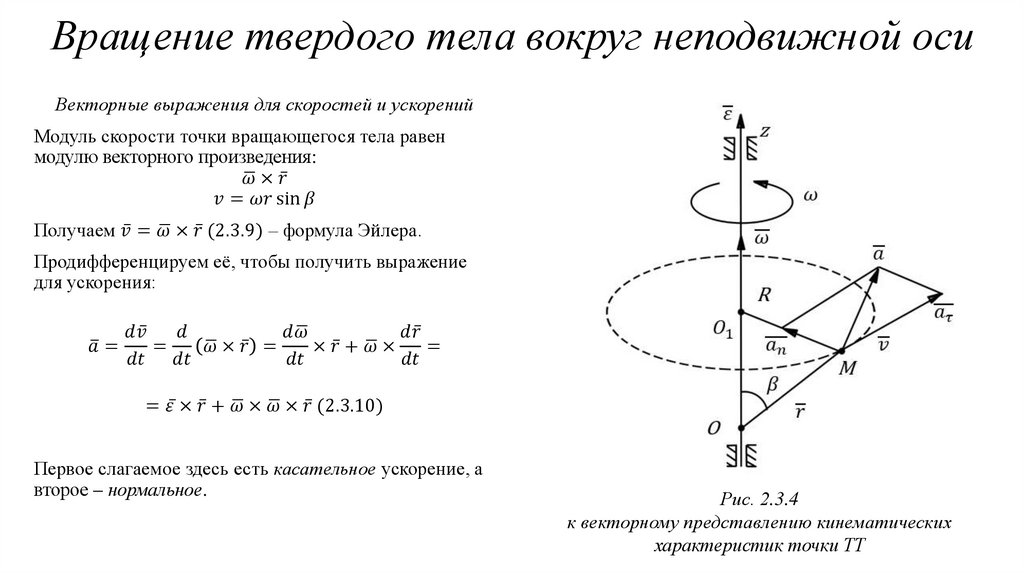
Вращение твёрдого тела вокруг неподвижной оси………………………………………………………………....................................…...…31
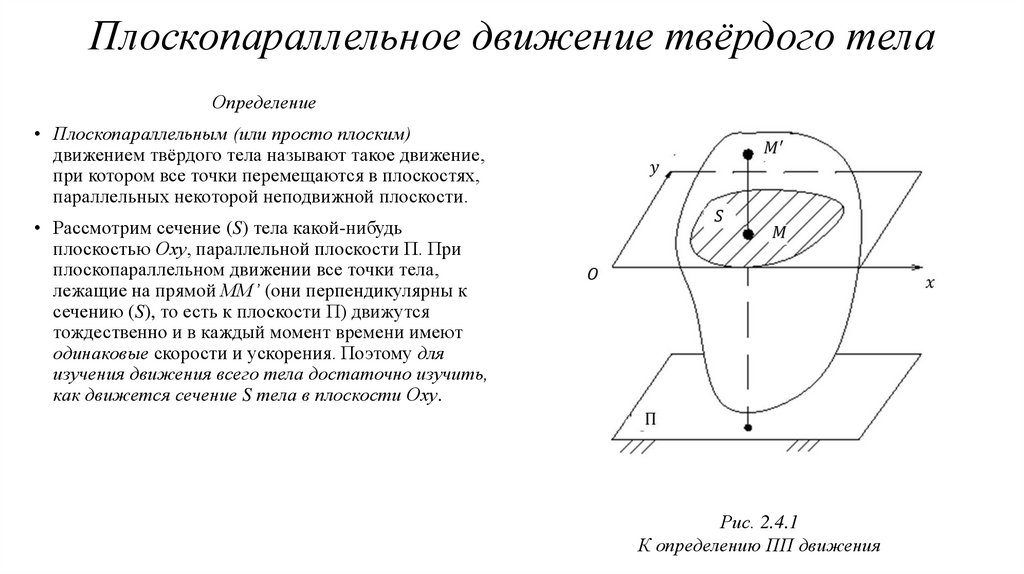
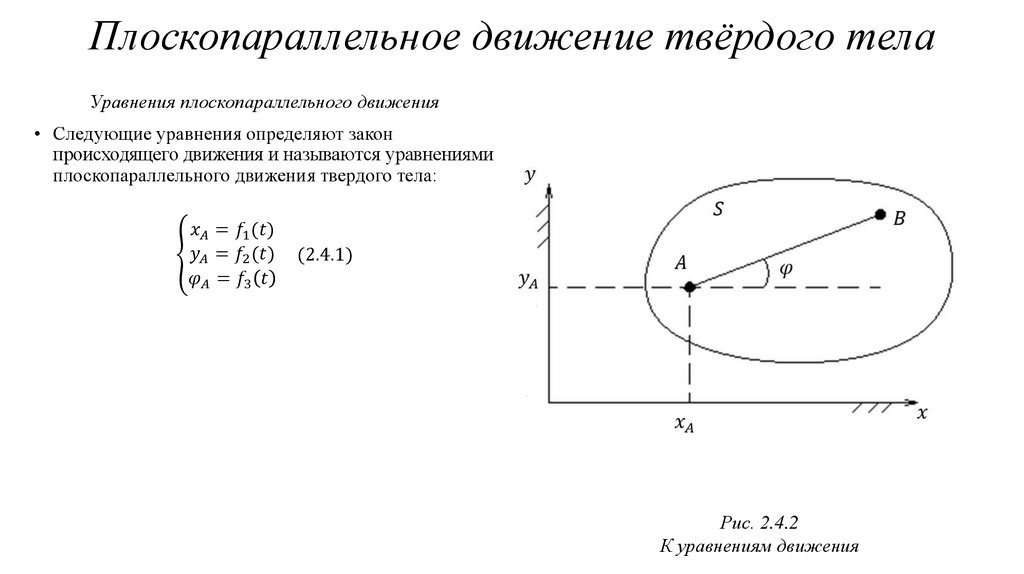
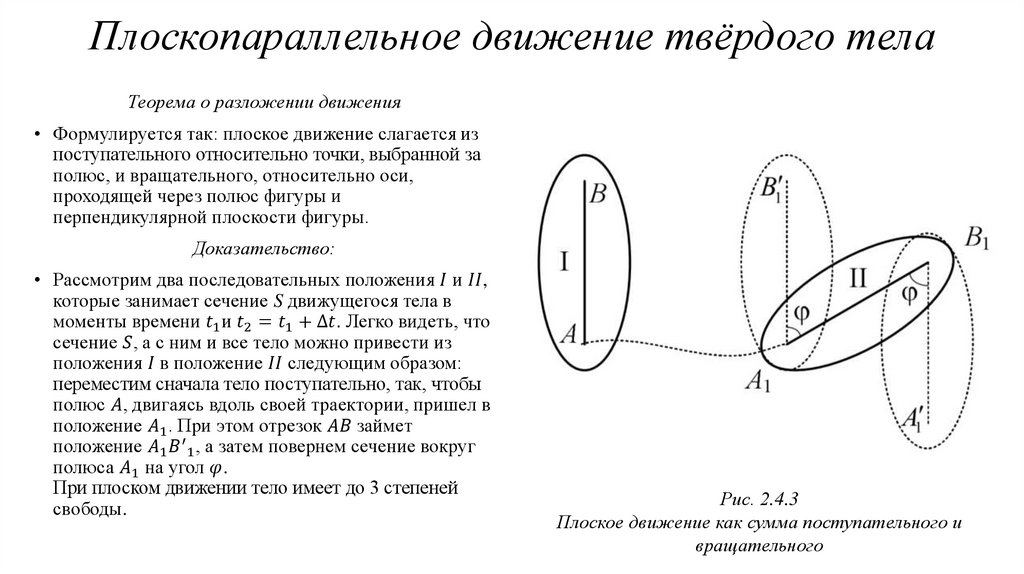
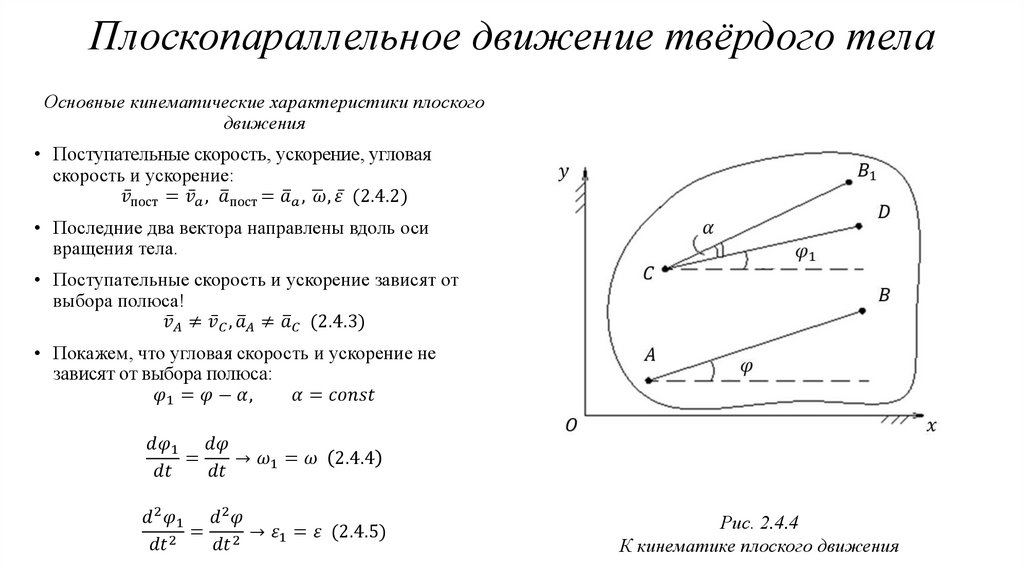
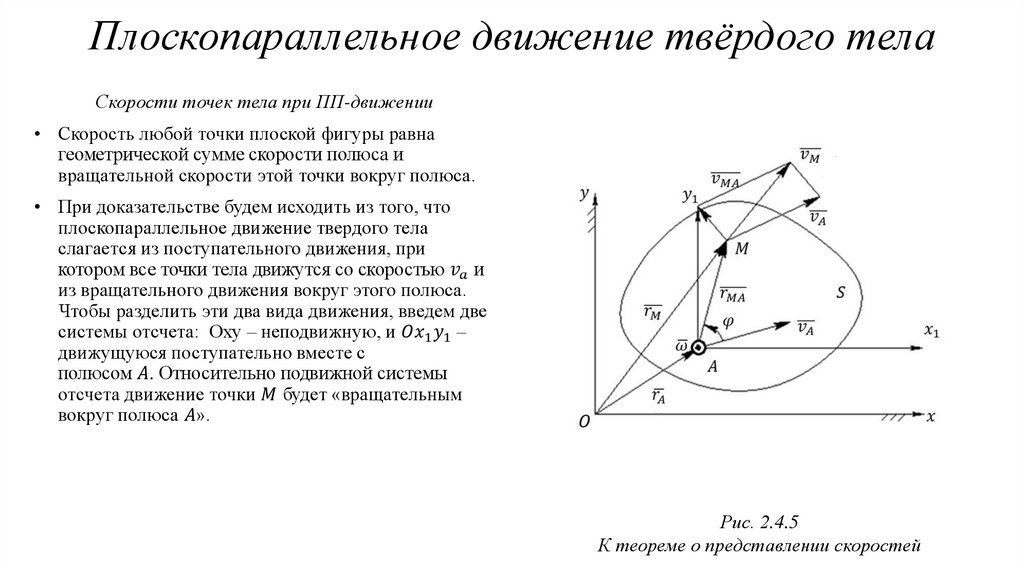
Плоскопараллельное движение…………………….………………………………………………………………………………………………...…36
Введение в ТММ………………………………………………………………………………………………………………………………..…………..45
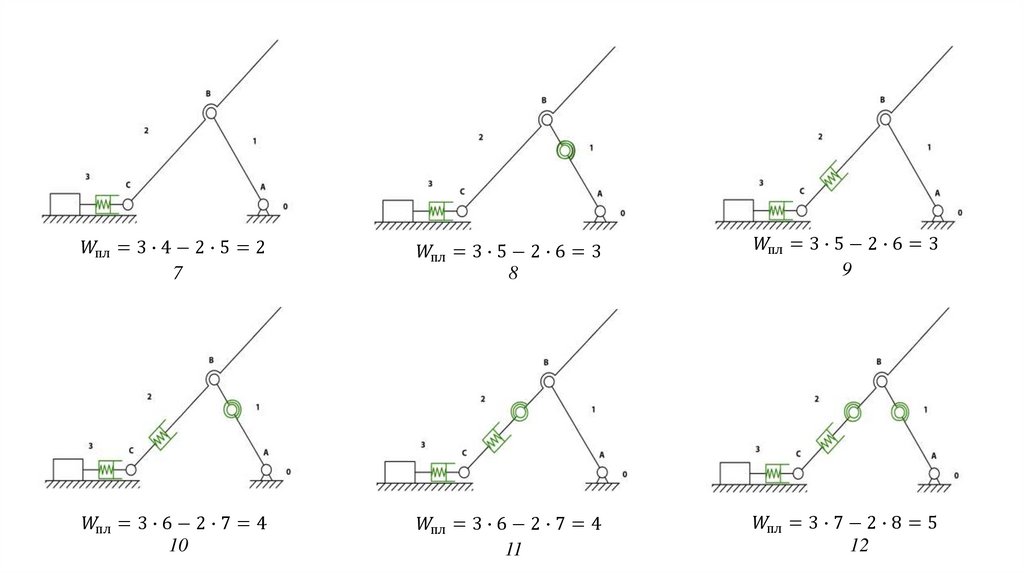
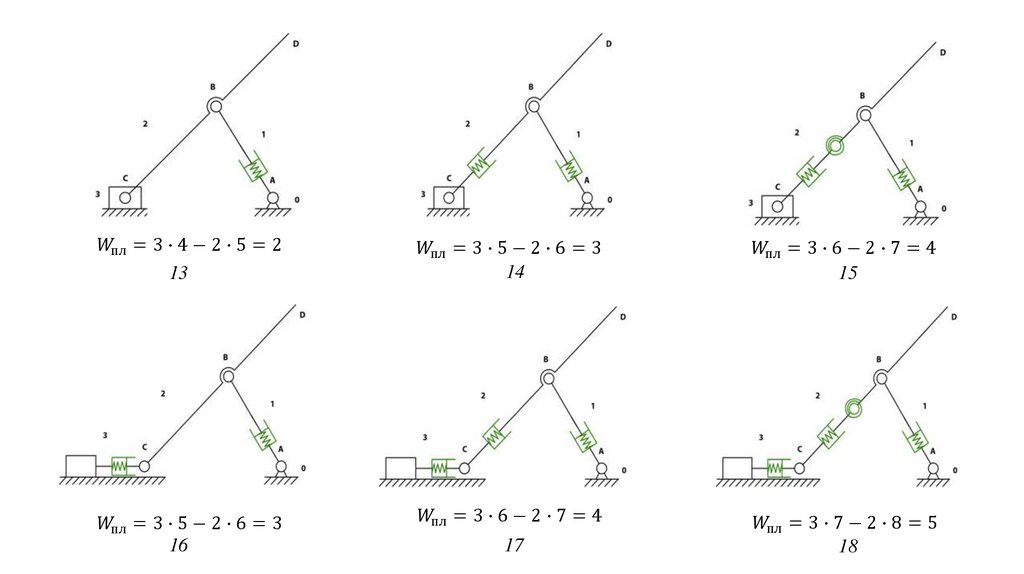
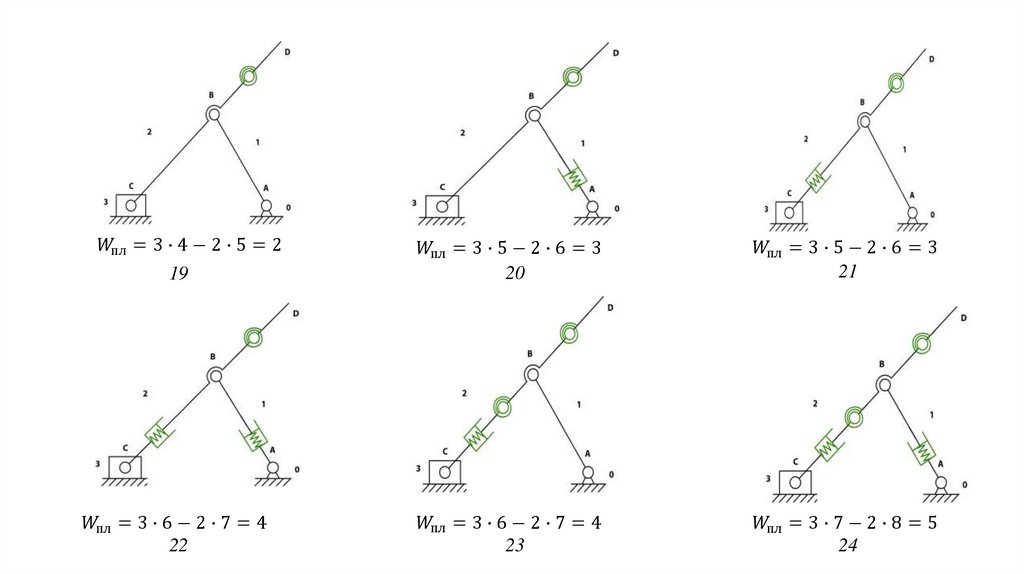
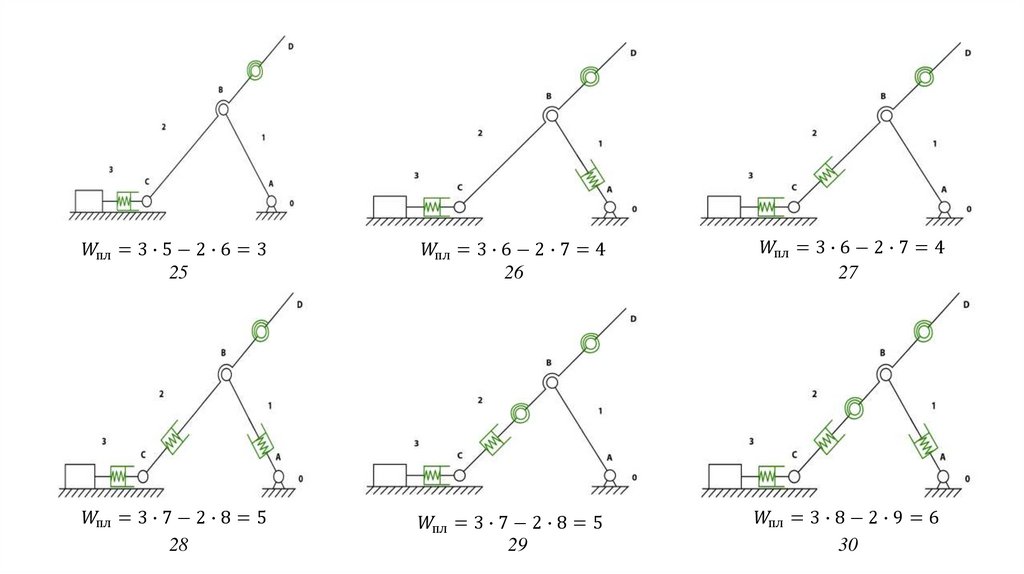
Структурный Анализ и Синтез………………………………………………………………………………………………………………….……..54
ДЗ №1…………………………………………………………………………………………………………………………………………………..…….59
ДЗ №2……………………………………………………………………………………………………………………………………………..………….67
ДЗ №3…………………………………………………………………………………………………………………………………………….…………..71
Список литературы…………………..……………..………….. ………….. ………….. ………….. ………….. ………….. ………….. ………....78
3. Понятие вектора и производной
• Вектор – это направленный отрезок, то есть отрезок,имеющий длину и определенное направление.
Графически вектора изображаются в виде
направленных отрезков прямой определенной длины.
• Вектор, начало которого есть точка А, а конец – точка
В, обозначается