


 mechanics
mechanics pedagogy
pedagogySimilar presentations:
")

")







Манипулятор. Занятие 3
1.
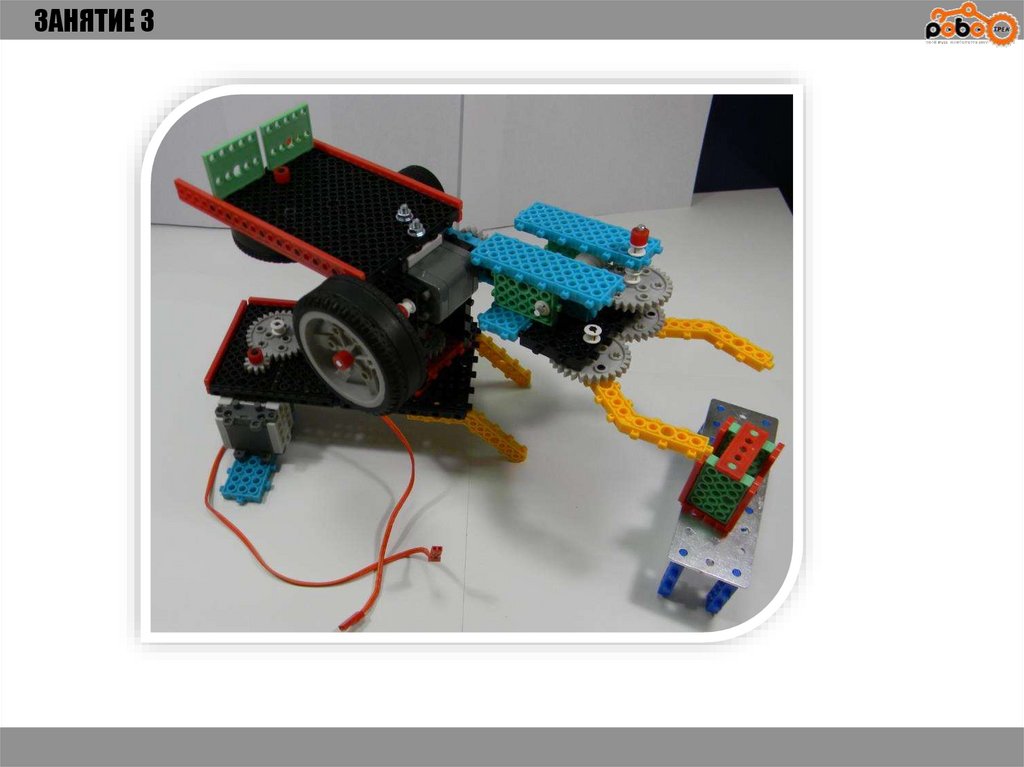
ЗАНЯТИЕ 3МАНИПУЛЯТОР
2.
Необходимые детали и электронные компонентыИзображение
Название
Кол-во
Блок 511
Изображение
Название
Кол-во
4
Алюминиевый вал 120 мм
1
Блок 1117
2
Блок 35
4
Блок 311
4
Крепление двигателя
2
Балка 112
5
Рамка 15
9
Балка 15
2
Колесо малое
3
Шестеренка 10
7
Колесо большое 1
2
Шестеренка 20
3
Алюминиевый вал 44 мм
1
Шестеренка 30
7
Рамка 121
3
Пластина алюминиевая
309
1
Рамка 111
1
Втулка пластиковая
большая
11
Муфта резиновая
15
Втулка пластиковая малая
5
Балка 115
2
Вал 30 мм
3
Гайка
2
Штифт 26
3
Болт 16 мм
2
3.
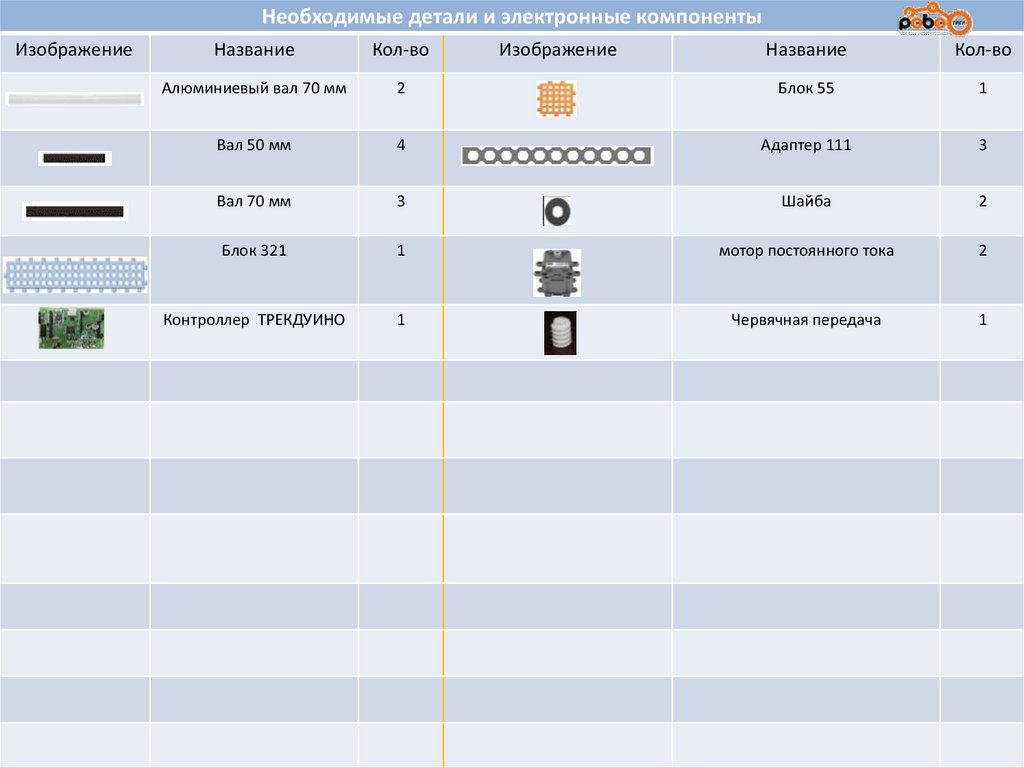
Необходимые детали и электронные компонентыИзображение
Название
Кол-во
Алюминиевый вал 70 мм
Изображение
Название
Кол-во
2
Блок 55
1
Вал 50 мм
4
Адаптер 111
3
Вал 70 мм
3
Шайба
2
Блок 321
1
мотор постоянного тока
2
Контроллер ТРЕКДУИНО
1
Червячная передача
1
4.
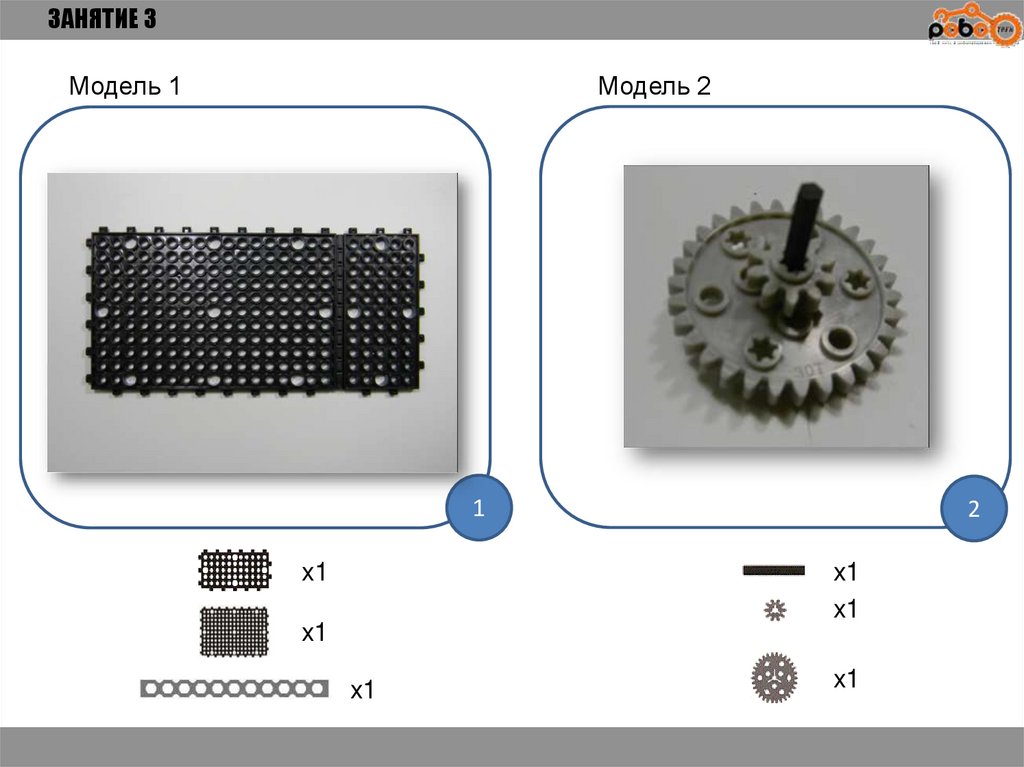
ЗАНЯТИЕ 3Модель 1
Модель 2
1
x1
2
x1
x1
x1
x1
x1
5.
ЗАНЯТИЕ 3Модель 3
Модель 4
3
4
x1
x1
x1
Модель 1 + Модель 2 + Модель 3
6.
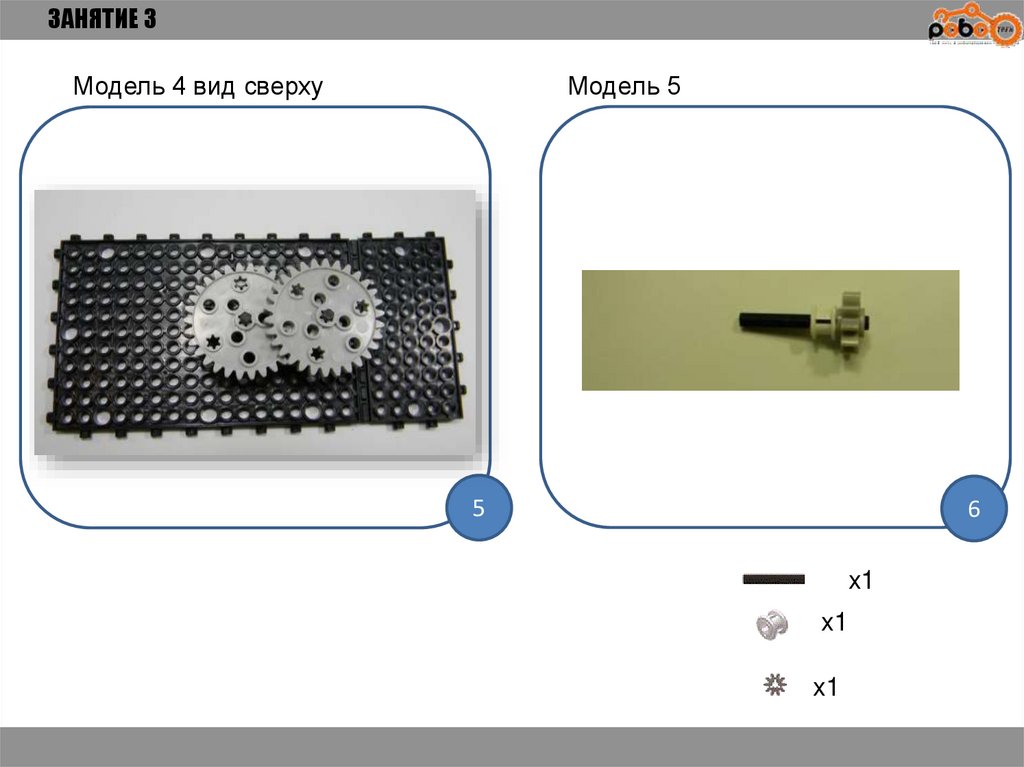
ЗАНЯТИЕ 3Модель 4 вид сверху
Модель 5
5
6
x1
x1
x1
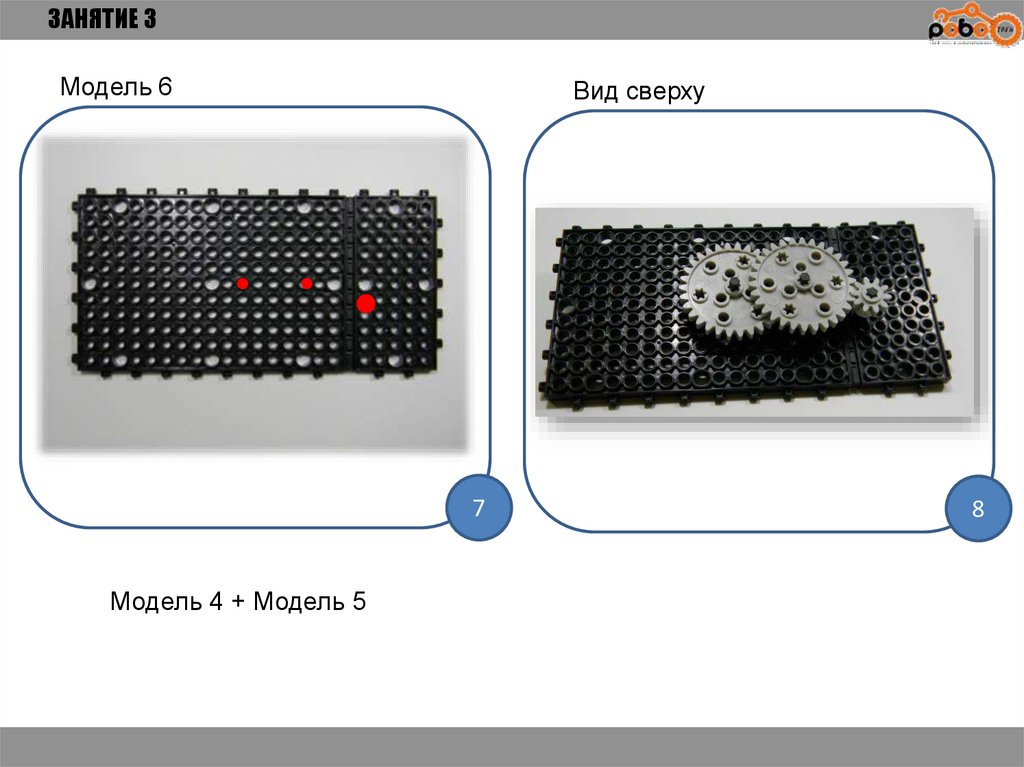
7.
ЗАНЯТИЕ 3Модель 6
Вид сверху
7
Модель 4 + Модель 5
8
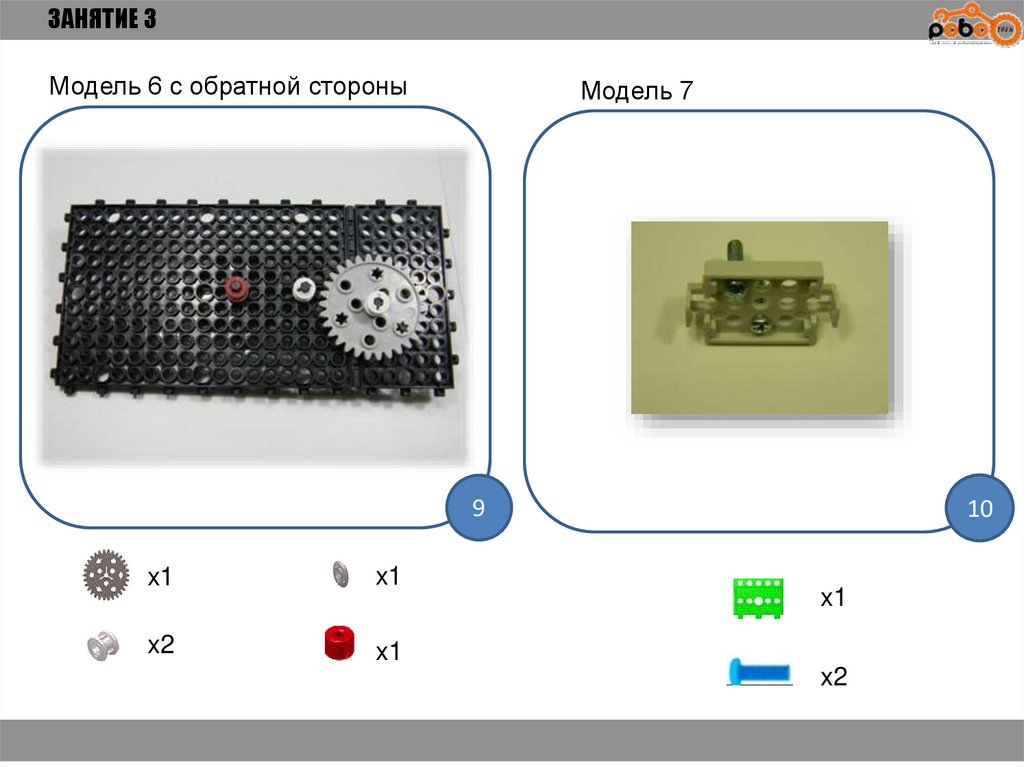
8.
ЗАНЯТИЕ 3Модель 6 с обратной стороны
Модель 7
9
x1
x1
x2
x1
10
x1
x2
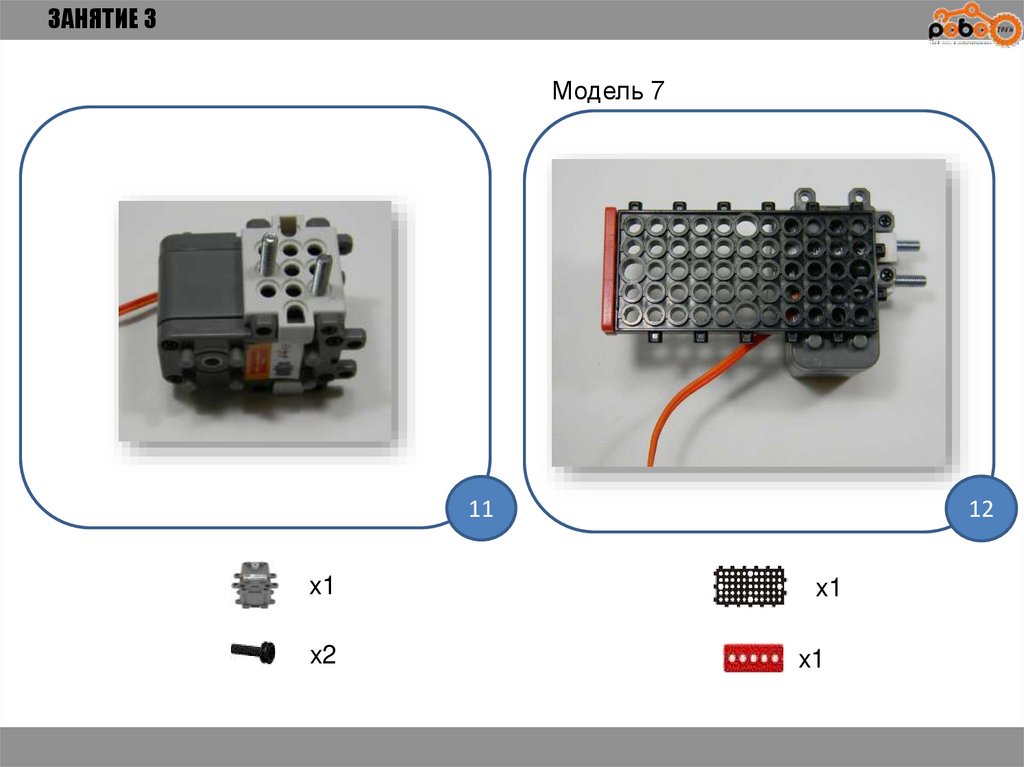
9.
ЗАНЯТИЕ 3Модель 7
11
x1
x2
12
x1
x1
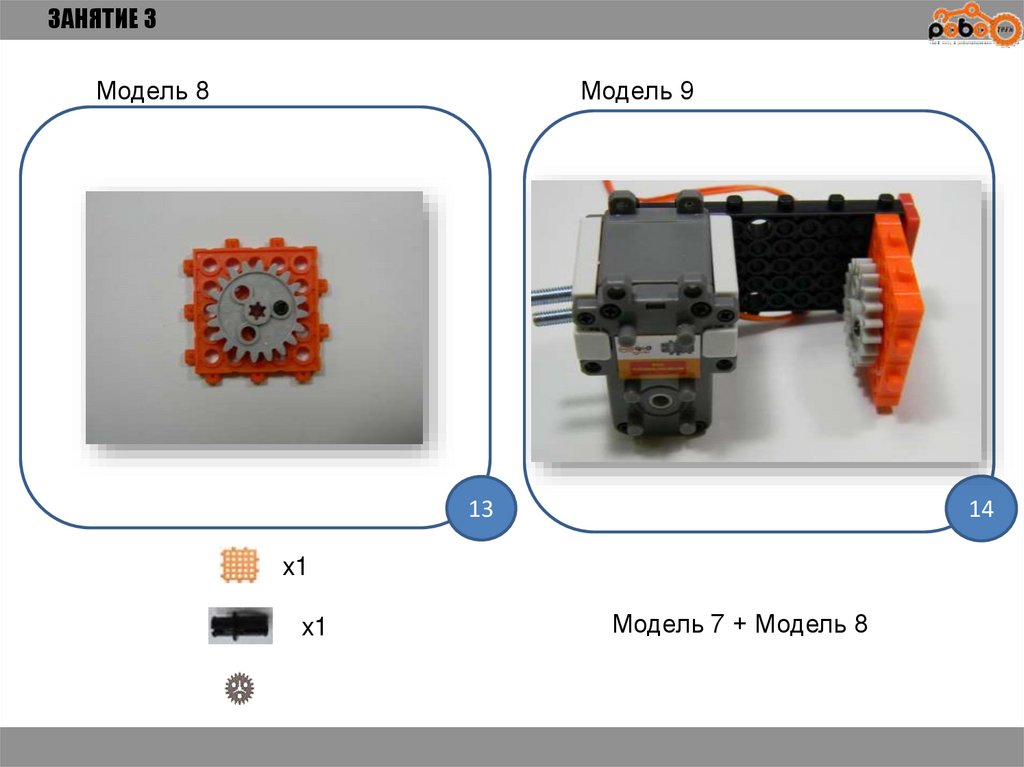
10.
ЗАНЯТИЕ 3Модель 8
Модель 9
13
14
x1
x1
Модель 7 + Модель 8
11.
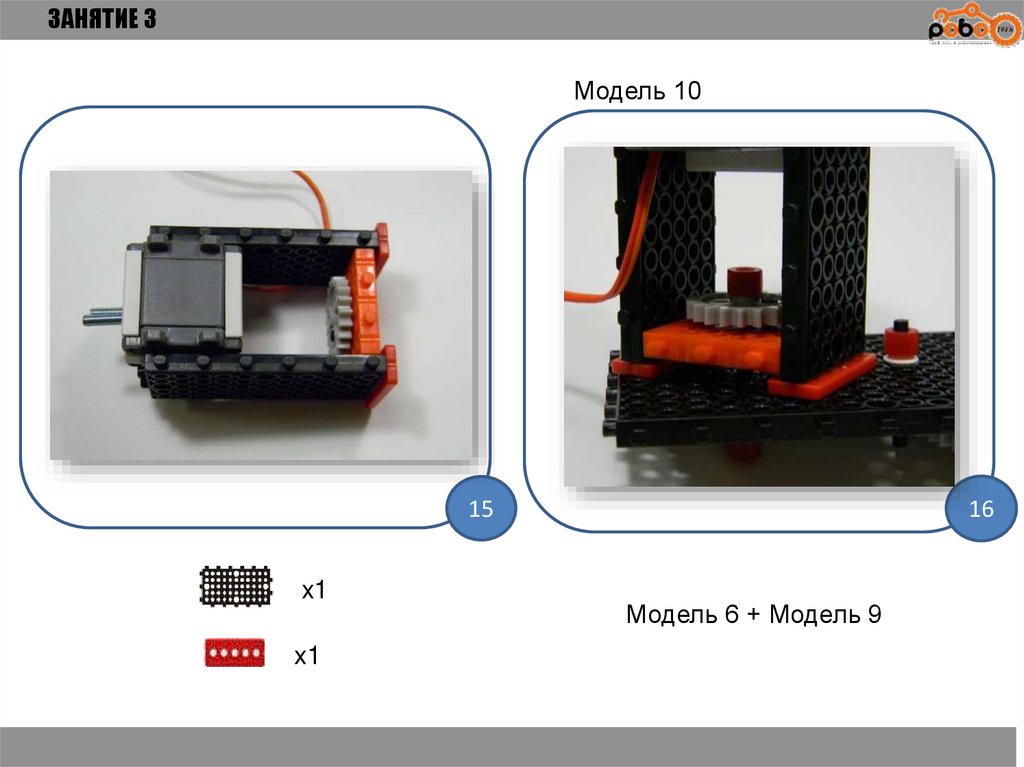
ЗАНЯТИЕ 3Модель 10
15
x1
x1
16
Модель 6 + Модель 9
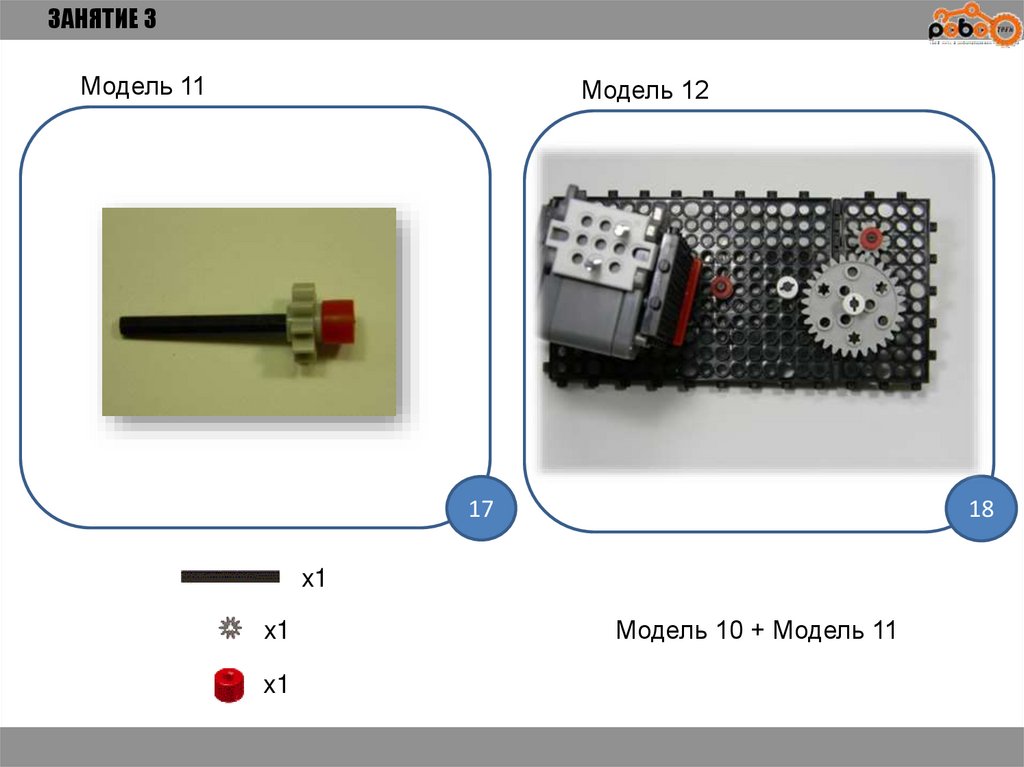
12.
ЗАНЯТИЕ 3Модель 11
Модель 12
17
18
x1
x1
x1
Модель 10 + Модель 11
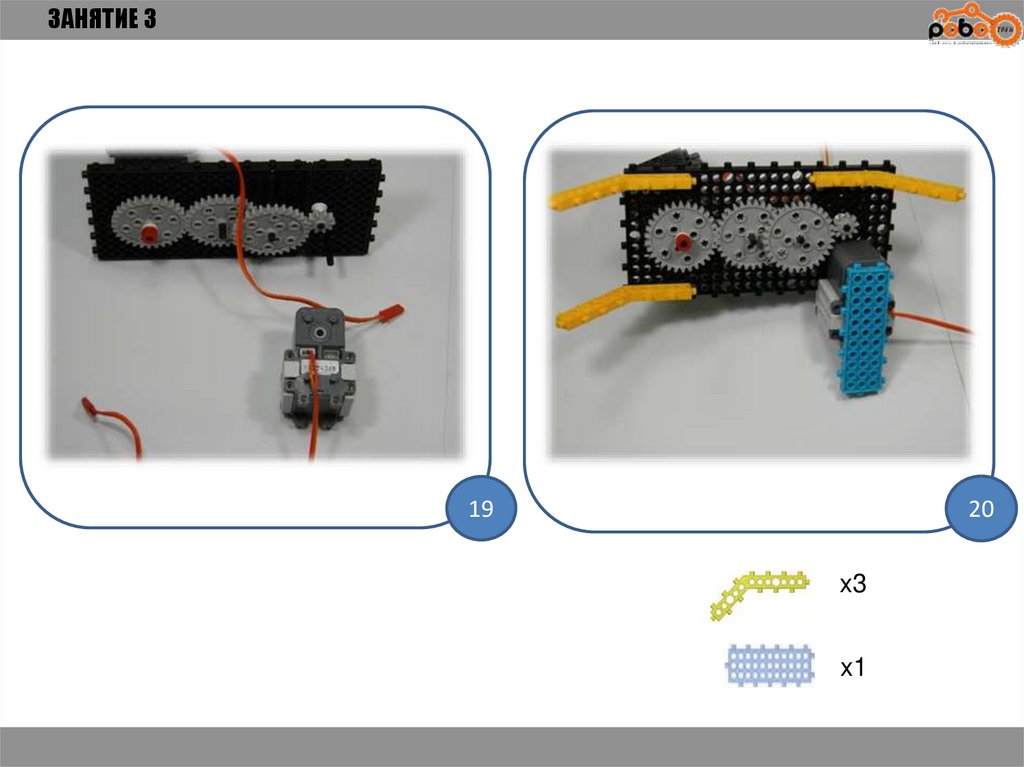
13.
ЗАНЯТИЕ 319
20
x3
x1
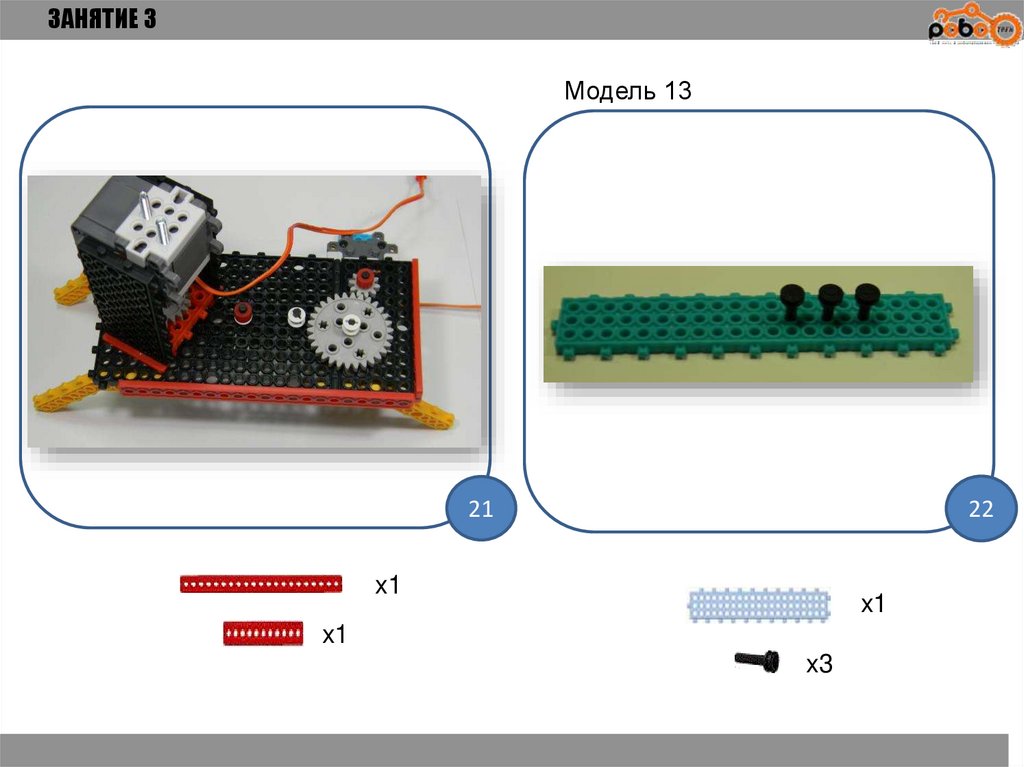
14.
ЗАНЯТИЕ 3Модель 13
21
22
x1
x1
x1
x3
15.
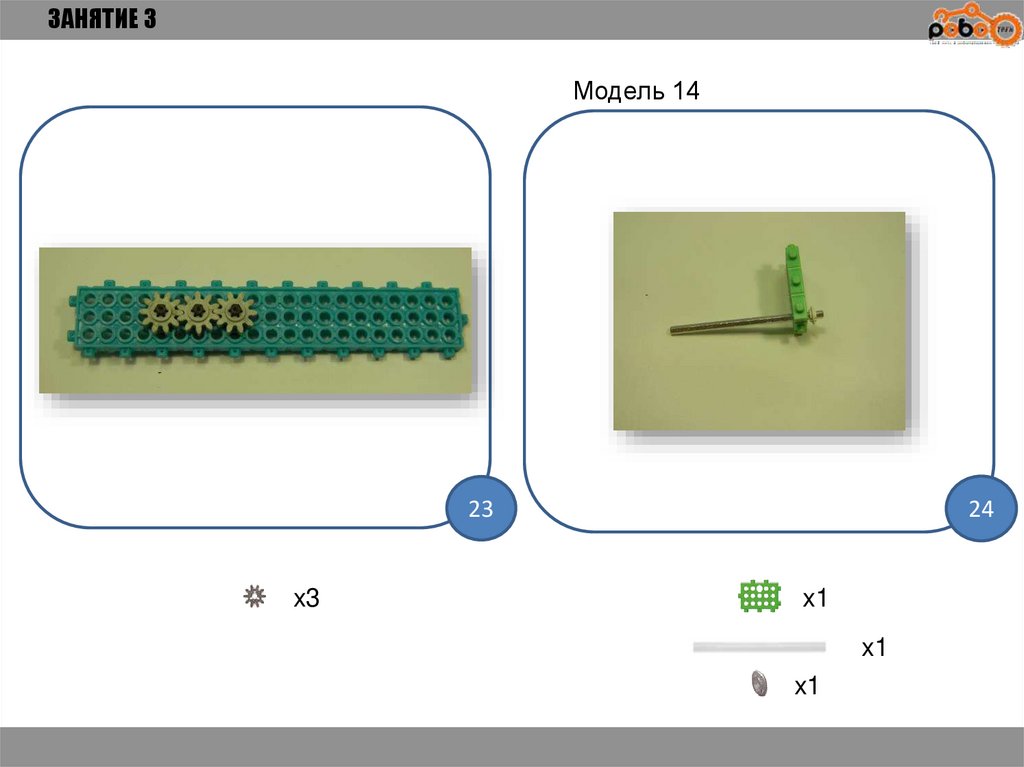
ЗАНЯТИЕ 3Модель 14
23
x3
24
x1
x1
x1
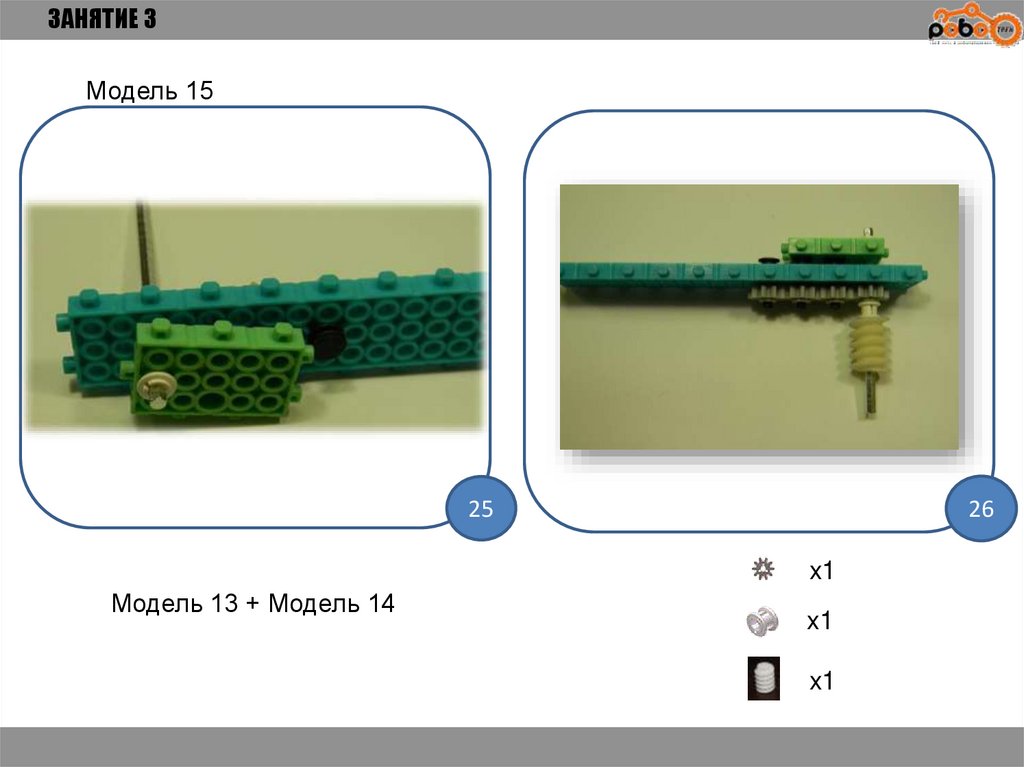
16.
ЗАНЯТИЕ 3Модель 15
25
26
x1
Модель 13 + Модель 14
x1
x1
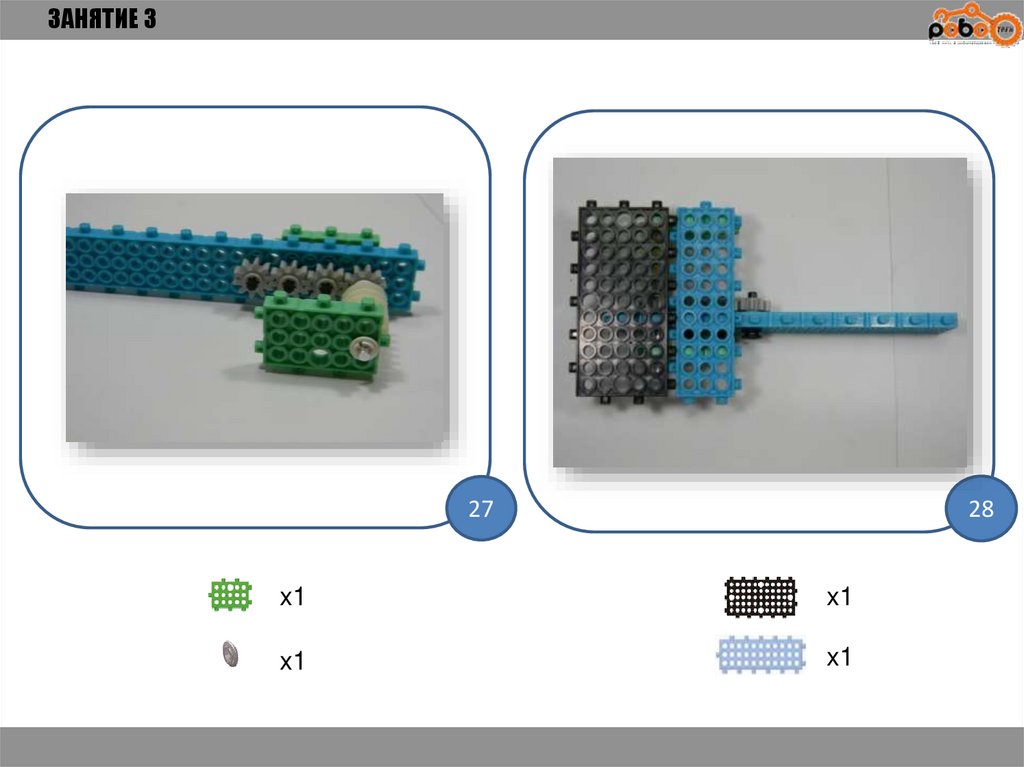
17.
ЗАНЯТИЕ 327
28
x1
x1
x1
x1
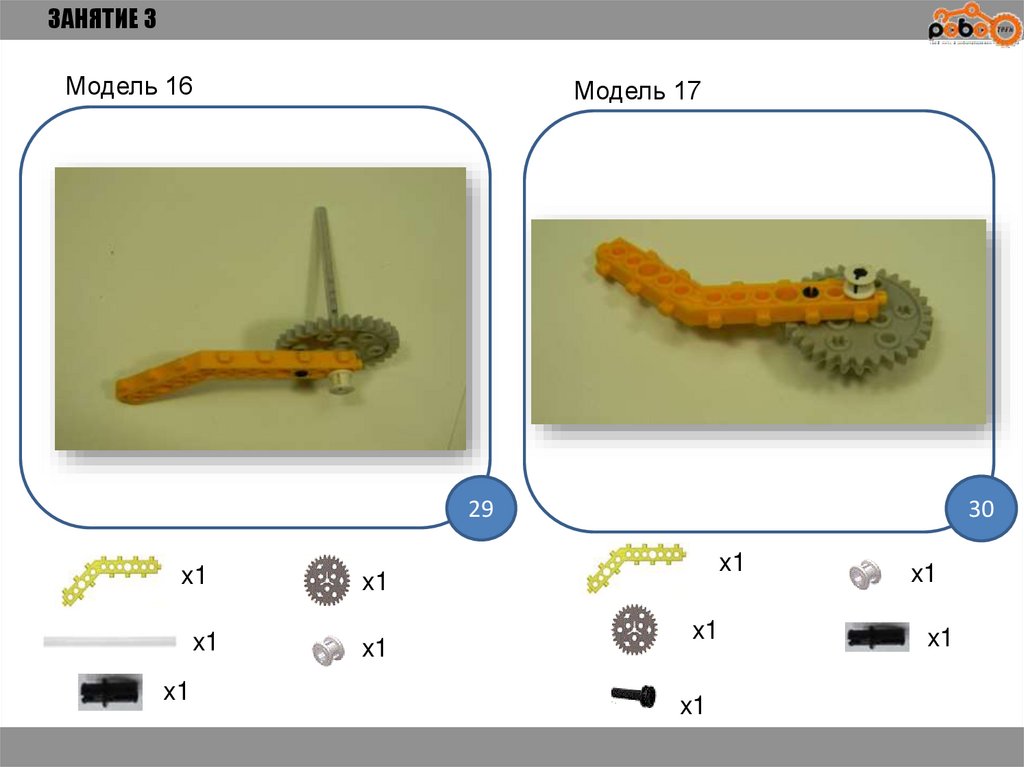
18.
ЗАНЯТИЕ 3Модель 16
Модель 17
29
x1
x1
x1
30
x1
x1
x1
x1
x1
x1
x1
19.
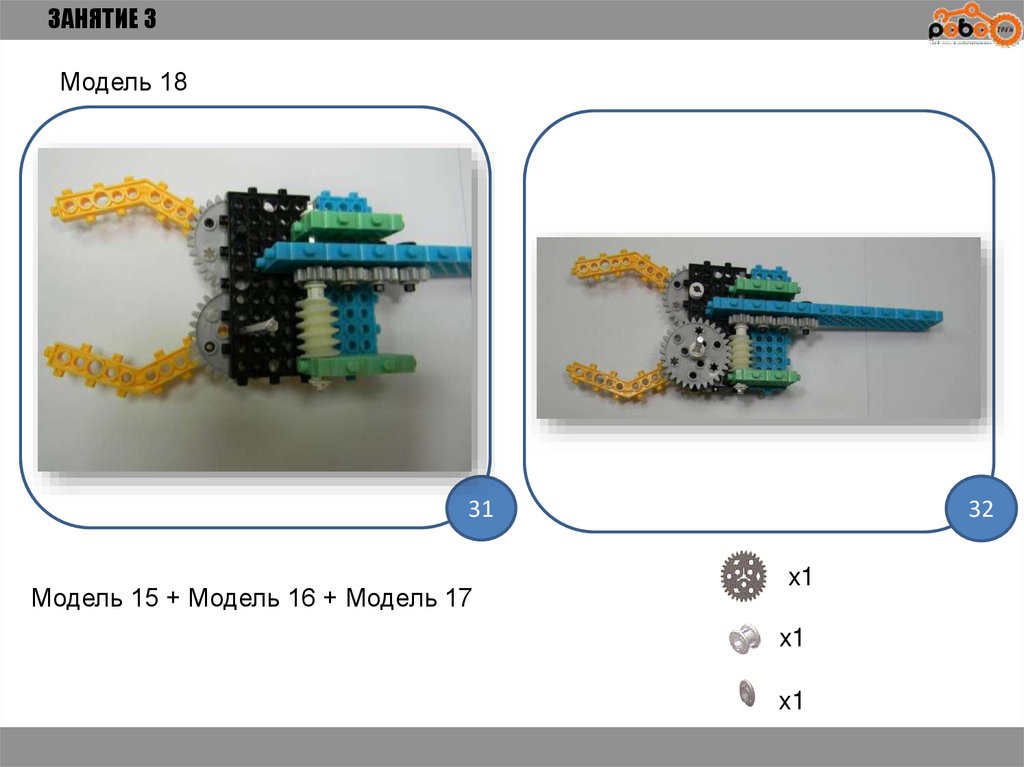
ЗАНЯТИЕ 3Модель 18
31
Модель 15 + Модель 16 + Модель 17
32
x1
x1
x1
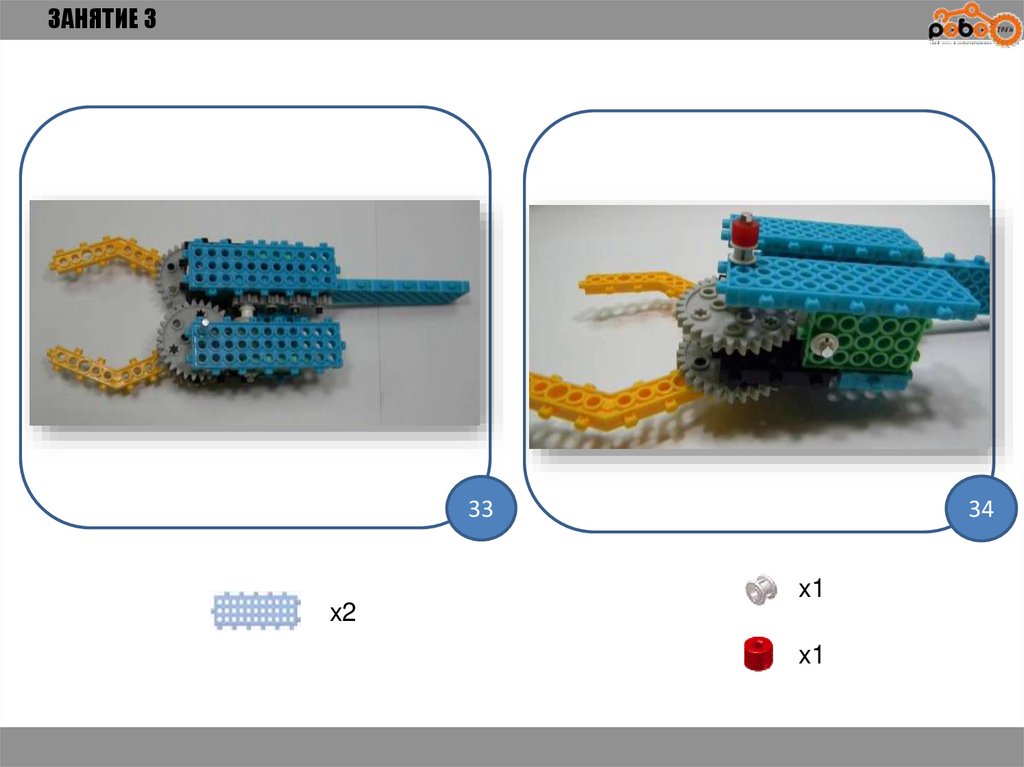
20.
ЗАНЯТИЕ 333
34
x1
x2
x1
21.
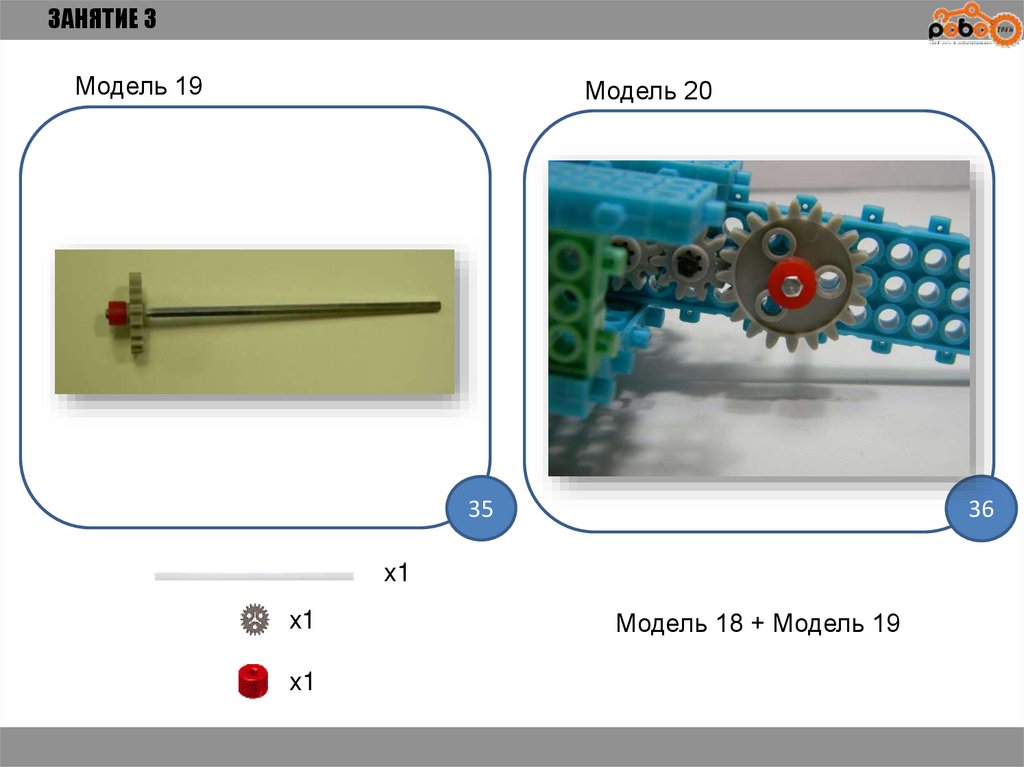
ЗАНЯТИЕ 3Модель 19
Модель 20
35
36
x1
x1
x1
Модель 18 + Модель 19
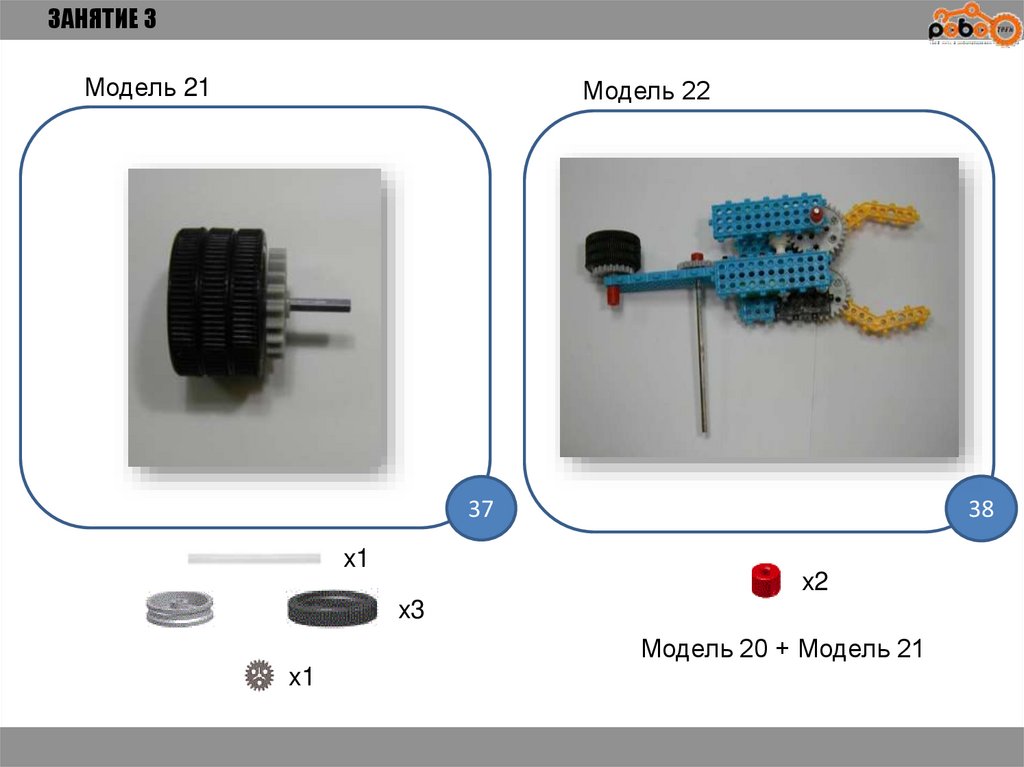
22.
ЗАНЯТИЕ 3Модель 21
Модель 22
37
x1
38
x2
x3
Модель 20 + Модель 21
x1
23.
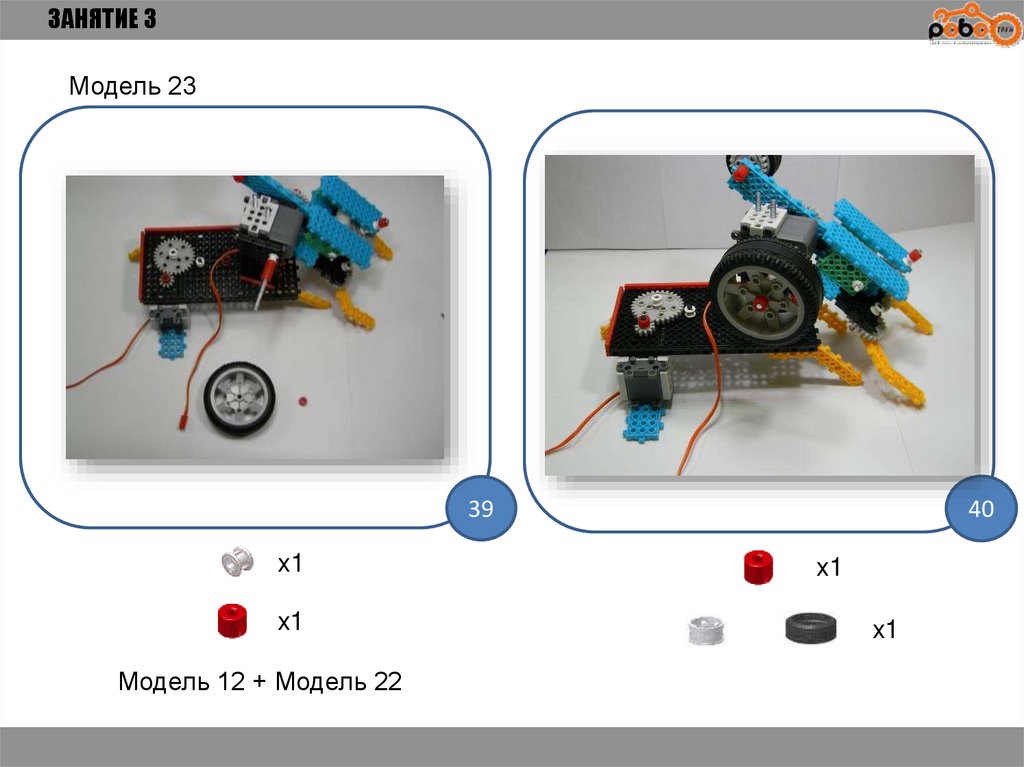
ЗАНЯТИЕ 3Модель 23
39
x1
x1
Модель 12 + Модель 22
40
x1
x1
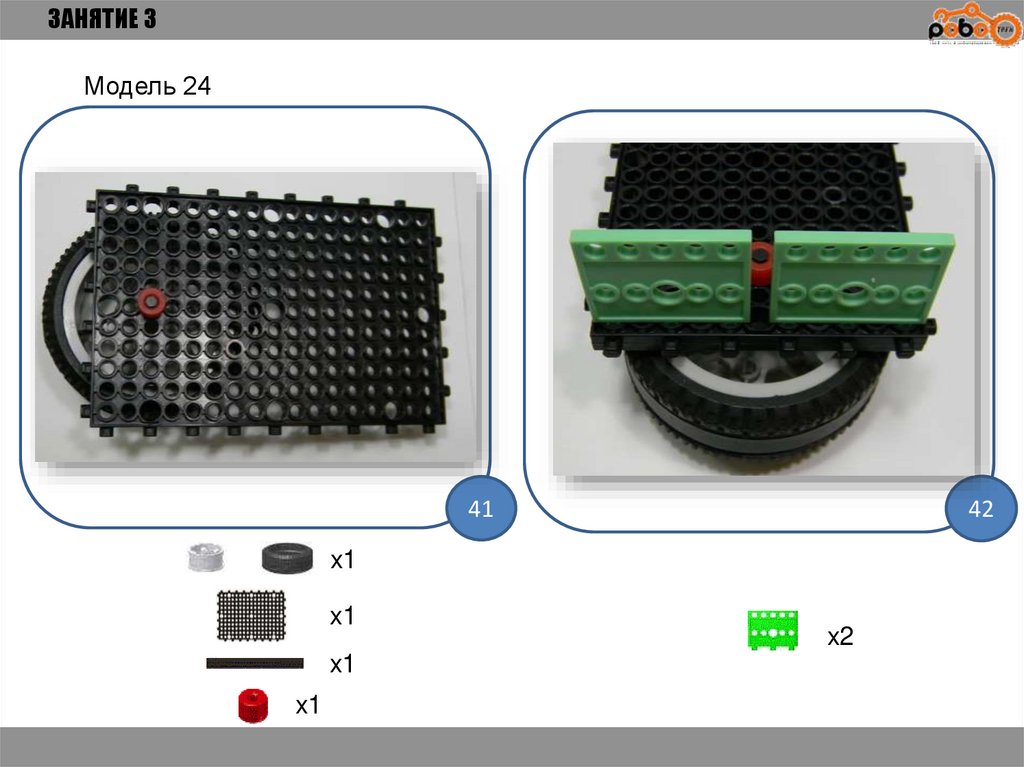
24.
ЗАНЯТИЕ 3Модель 24
41
42
x1
x1
x1
x1
x2
25.
ЗАНЯТИЕ 3Модель 25
43
44
x2
x2
x2
Модель 23 + Модель 24
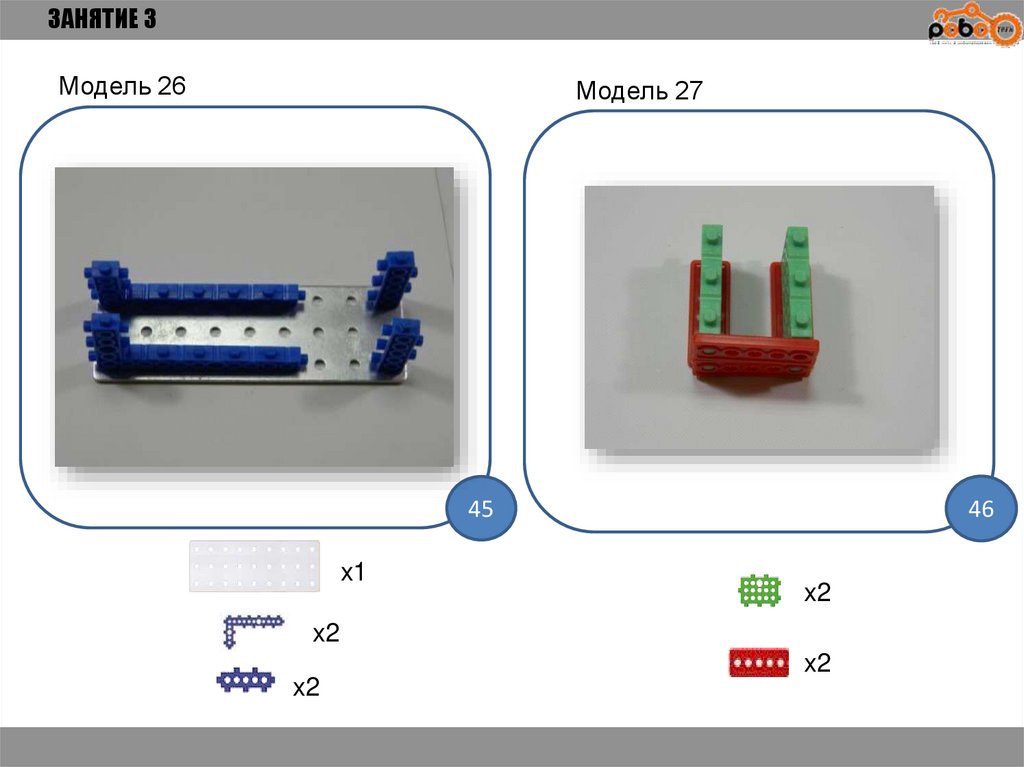
26.
ЗАНЯТИЕ 3Модель 26
Модель 27
45
x1
46
x2
x2
x2
x2
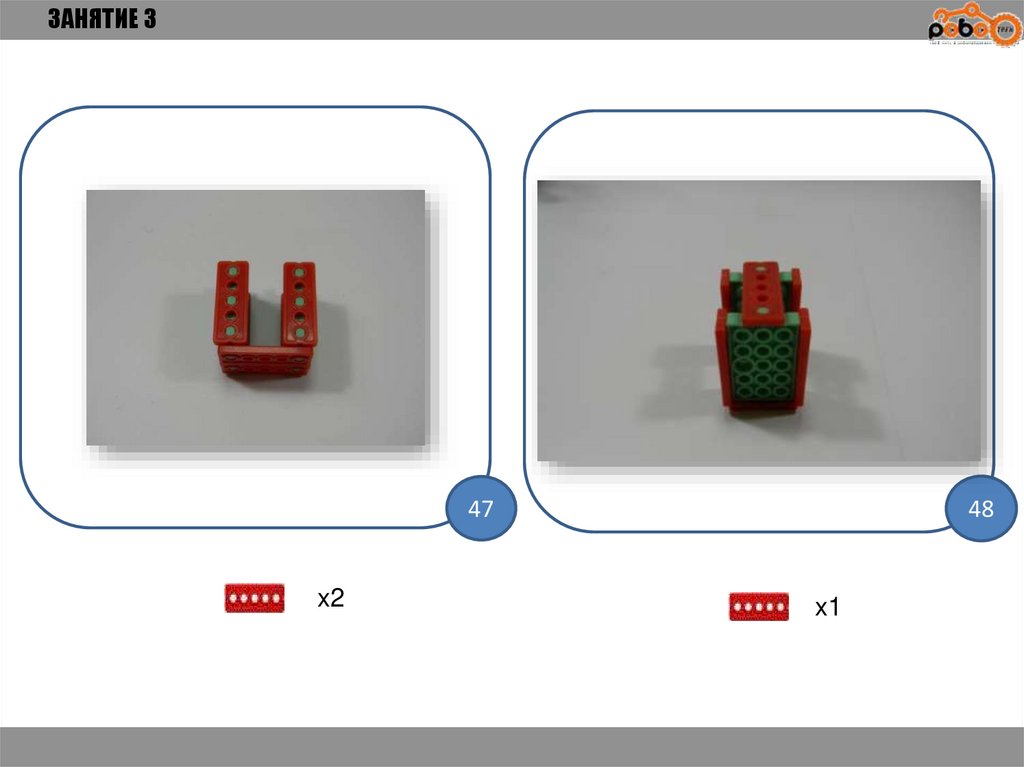
27.
ЗАНЯТИЕ 347
x2
48
x1
28.
ЗАНЯТИЕ 329.
ЗАНЯТИЕ 1КАК ЗАПУСТИТЬ РОБОТА
Подключите:
1. Двигатель, отвечающий за поворот, в порт M3;
2. Двигатель, отвечающий за подъем, в порт M1;
Загрузите программу в плату.
Робот управляется с помощью встроенных в
контроллер кнопок.
30.
ЗАНЯТИЕ 3ДО ВСТРЕЧИ!
УДАЧИ!