









 electronics
electronicsSimilar presentations:







")
")

Экоробот. Проблема, решаемая в проекте
1.
Экоробот - это инженерный проект,предназначеный для расчистки
территории от мусора . Собран из
базового набора LEGO Mindstorvs EV3.
Выполнил Иванов Лев Станиславович,
Дата рождения 09.09.2010
ГБОУ «Специальная (коррекционная) школаинтернат» г.Новотроицка Оренбургской области
2.
Экоробот предназначен длярасчистки территории от мусора
для строительства, после
праздников.
Собран из базового набора LEGO
Mindstorvs EV3.
Робот движется по кругу, увидев
перед собой препятствие, едет на
него, выталкивает за границу
круга и едет обратно. Потом
продолжает движение по кругу,
пока не вытолкает весь «мусор».
3.
Проблема, решаемая в проекте – сохранить экологическоесостояние окружающего пространства, очистить территории от
мусора, для этого человеку нужны электронные помощники.
4.
Цели проекта – создать автоматизированное устройство,способное расчищать территорию от мусора.
Для этого создать модель робота с ультразвуковым датчиком и
датчиком цвета, который умеет двигаться по линии, видеть
предметы, останавливаться перед предметами и черной линией.
5.
Задачи проекта• Изучить работу больших моторов
• Изучить работу ультразвукового датчика и датчика цвета
• Собрать робота и запрограммировать его
6.
Этапы работы над проектомРабота над проектом состоит из трех этапов:
1). Сборка
2). Программирование
3). Тестирование модели.
7.
1 этап. Сборка моделиЭкоробот собран из базового набора Lego Mindstorms EV3
8.
1 этап. Сборка модели• При сборке я использовал два больших мотора, датчик цвета,
ультразвуковой датчик, и модуль EV3.
9.
2 этап. ПрограммированиеПрораммирование – главный этап в робототехнике!
Без программы робот не работает.
Я использовал специальное программное обеспечение
Lego Mindstorms EV3.
10.
2 этап. Программирование. Программа11.
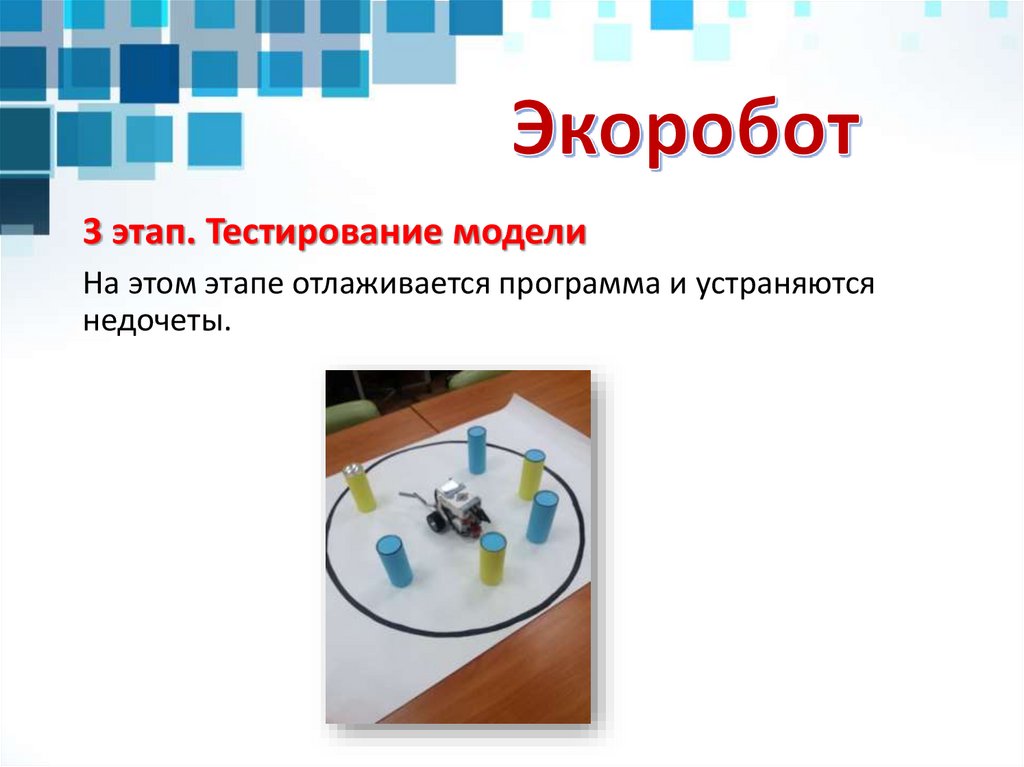
3 этап. Тестирование моделиНа этом этапе отлаживается программа и устраняются недочеты.
12.
Результаты проектаВ результате работы над проектом я получил робота, который
двигается по кругу , увидев «мусор», он выталкивает его за
пределы круга, потом возвращается обратно и движется дальше.
Вытолкнув весь «мусор», робот будет продолжать движение по
кругу.
Выводы
Работу над проектом следует продолжать, чтобы расширить
возможности робота. Например, увеличить территорию и не
ограничивать ее круговой линией. А также запрограммировать
остановку после расчистки территории. Это мои планы
дальнейшей работы над проектом.
13.
3 этап. Тестирование моделиНа этом этапе отлаживается программа и устраняются
недочеты.
14.
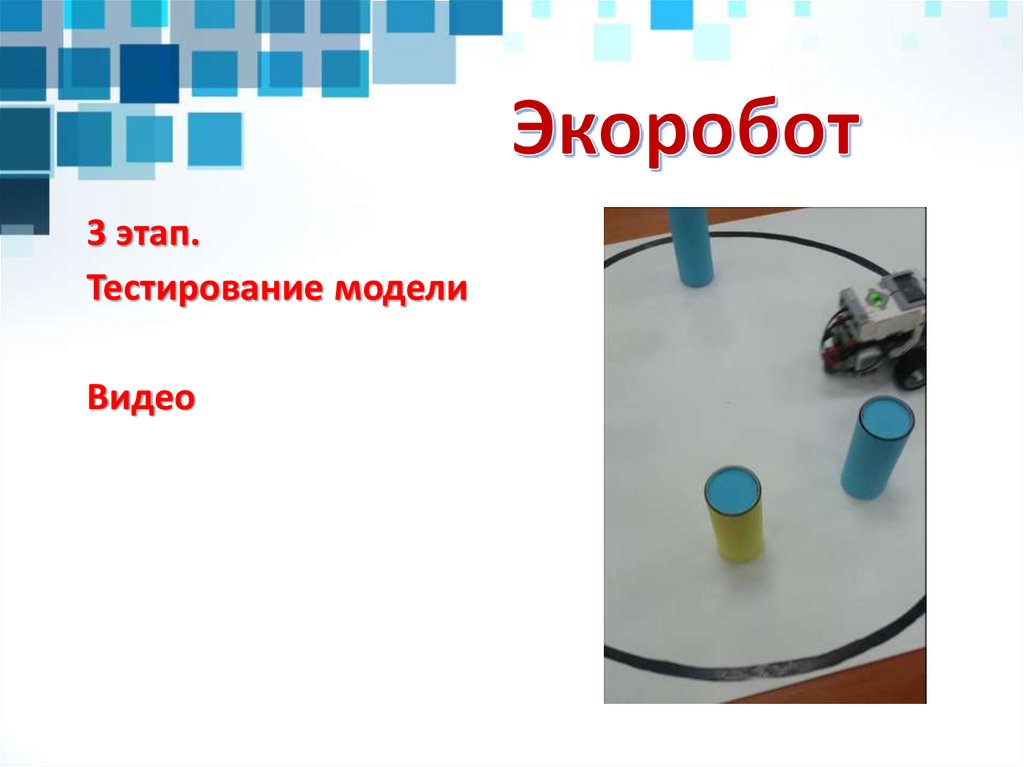
3 этап.Тестирование модели
Видео
15.
Результаты проектаВ результате работы над проектом я получил робота, который
двигается по кругу , увидев «мусор», он выталкивает его за
пределы круга, потом возвращается обратно и движется дальше.
Вытолкнув весь «мусор», робот будет продолжать движение по
кругу.
Выводы
Работу над проектом следует продолжать, чтобы расширить
возможности робота. Например, увеличить территорию и не
ограничивать ее круговой линией. А также запрограммировать
остановку после расчистки территории. Это мои планы
дальнейшей работы над проектом.