




 warfare
warfareSimilar presentations:




")
: история, понятие, назначение, функции")

")

")
Система управления полетом беспилотного летательного аппарата
1.
Министерство обороны Российской ФедерацииЧерноморское высшее военно-морское
ордена Красной звезды училище
им. П.С. Нахимова
ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА
Тема: Система управления полетом беспилотного
летательного аппарата
Исполнитель:
Филиппов Алексей Сергеевич
Руководитель:
доцент кафедры РТС
Палаев Сергей Васильевич
СЕВАСТОПОЛЬ
2021
2.
Система управления полетом беспилотноголетательного аппарата
Актуальность: 1. Компактность и мобильность комплексов, обеспечивающие
возможность их быстрого свертывания, развёртывания и перевозки любым
транспортным средством.
2. Возможность применения в широком диапазоне физика
географических условиях.
Цель работы: разработка контроллера полета беспилотного летательного
аппарата.
Задачи: 1. Анализ принципов построения полетных контроллеров беспилотных
летательных аппаратов;
2. Выбор и обоснование структурной схемы разрабатываемого
устройства;
3. Разработка принципиальной схемы контроллера полета.
2
3.
1. Анализ принципов построения полетныхконтроллеров беспилотных летательных аппаратов
3
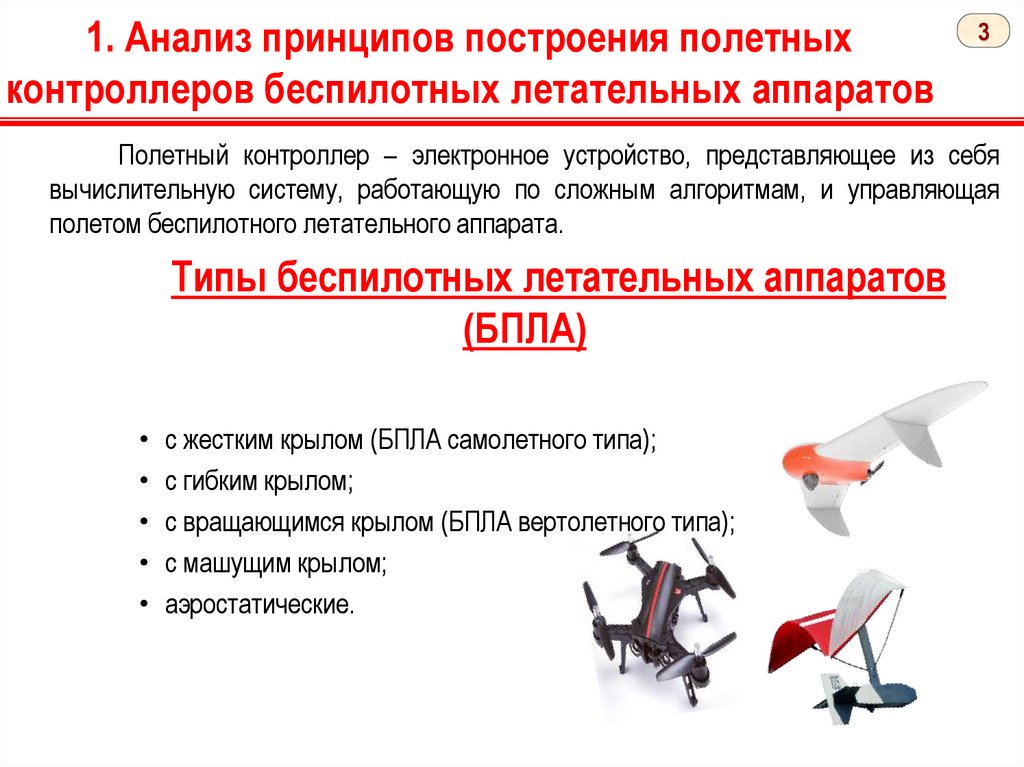
Полетный контроллер – электронное устройство, представляющее из себя
вычислительную систему, работающую по сложным алгоритмам, и управляющая
полетом беспилотного летательного аппарата.
Типы беспилотных летательных аппаратов
(БПЛА)
с жестким крылом (БПЛА самолетного типа);
с гибким крылом;
с вращающимся крылом (БПЛА вертолетного типа);
с машущим крылом;
аэростатические.
4.
Области применения БПЛА в различных сферах1% 4%
2%1%
8%
43%
9%
11%
21%
o Фотография
o Недвижимость
o Инженерные
коммуникации
o Строительство
o Сельское хозяйство
o Образование
o Промышленность
o МЧС
o Другое
Беспилотный летательный аппарат – это удобный и эффективный
инструмент, который применяется в различных сферах деятельности
людей, связанных с необходимостью проводить обзор местности и
мониторингом определенных объектов с воздуха. С помощью БПЛА
существенно сокращаются финансовые расходы, минимизируются риски
для персонала, оптимизируется работа предприятия и обеспечивается
надежный контроль существующей обстановки.
4
5.
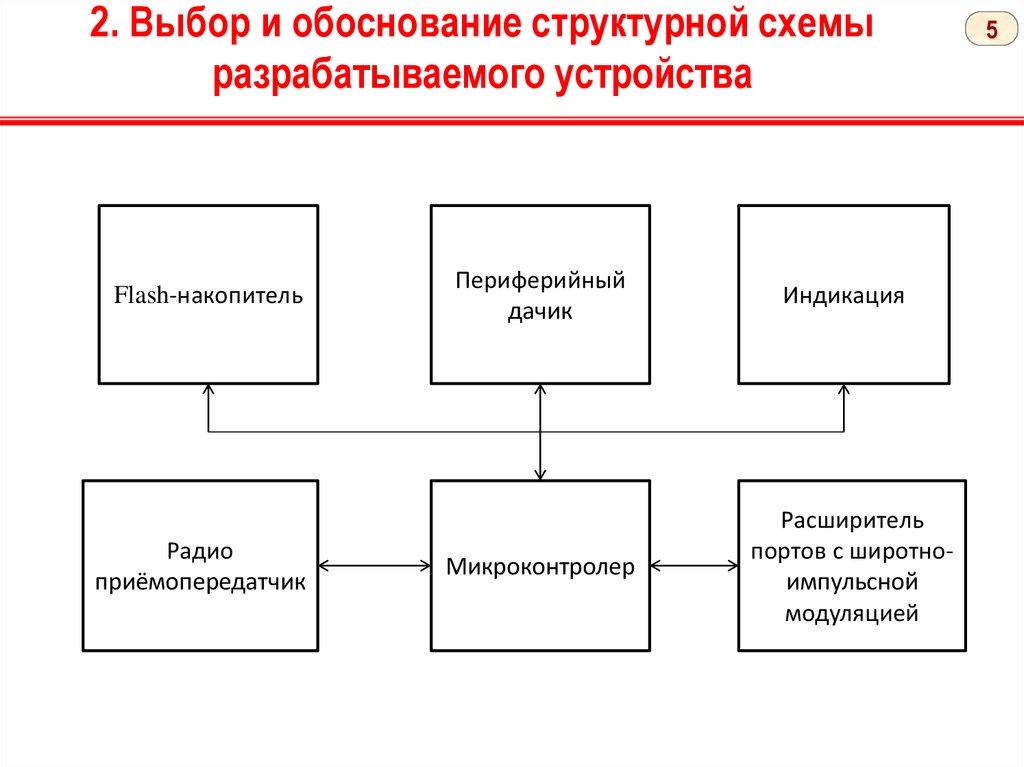
2. Выбор и обоснование структурной схемыразрабатываемого устройства
Flash-накопитель
Радио
приёмопередатчик
Периферийный
дачик
Микроконтролер
Индикация
Расширитель
портов с широтноимпульсной
модуляцией
5
6.
3. Разработка электрической принципиальнойсхемы устройства
6
Состав разрабатываемого устройства
микроконтроллер ATmega328p
радио модуль nRF24L01+PA+LNA
акселерометр, гироскоп MPU-6050
магнитометр HMC5883L
7.
7приемник сигнала GPS модуль NEO-6M
барометр BMP180
расширитель портов PCA9685
8.
8датчик тока ACS758LCB-050U-PFF-T
пьезоэлектрический излучатель
PKM13EPYH4000-A0
flash-накопитель формата Мicro SD
9.
Схема электрическая принципиальная9
10.
Выводы по работе1. Проведён анализ принципов построения полетных контроллеров
беспилотных летательных аппаратов.
2. Выбрана и обоснована структурная схема разрабатываемого
устройства.
3. Разработана принципиальная схема контроллера полета.
Цель работы достигнута, все поставленные задачи решены в полном объеме.
10