
















 electronics
electronicsSimilar presentations:










Контроллеры для систем автоматизации
1.
Контроллеры для системавтоматизации
2.
Программируемые логическиеконтроллеры
Современные тенденции ПЛК:
уменьшение габаритов;
расширение функциональных возможностей;
увеличение количества поддерживаемых
интерфейсов и сетей;
использование идеологии "открытых систем";
использование языков программирования
стандарта МЭК 61131-3;
снижение цены.
3.
По развитости системы ввода/выводанано-ПЛК (менее 16 каналов);
микро-ПЛК (более 16, до 100 каналов);
средние (более 100, до 500 каналов);
большие (более 500 каналов).
4.
Классификация ПЛК5.
Типы ПЛКПо расположению модулей ввода-вывода ПЛК бывают:
• моноблочные - в которых устройство ввода-вывода не может быть удалено
из контроллера или заменено на другое. Конструктивно контроллер
представляет собой единое целое с устройствами ввода-вывода
(например, одноплатный контроллер). Моноблочный контроллер может
иметь, например, 16 каналов дискретного ввода и 8 каналов релейного
вывода;
• модульные - состоящие из общей корзины (шасси), в которой
располагаются модуль центрального процессора и сменные модули вводавывода. Состав модулей выбирается пользователем в зависимости от
решаемой задачи. Типовое количество слотов для сменных модулей - от 8
до 32;
• распределенные (с удаленными модулями ввода-вывода) - в которых
модули ввода-вывода выполнены в отдельных корпусах, соединяются с
модулем контроллера по сети (обычно на основе интерфейса RS-485) и
могут быть расположены на расстоянии до 1,2 км от процессорного
модуля.
6.
По конструктивному исполнению и способу крепленияпанельные (для монтажа на панель или дверцу
шкафа);
для монтажа на DIN-рейку внутри шкафа;
для крепления на стене;
стоечные - для монтажа в стойке;
бескорпусные (обычно одноплатные) для применения в
специализированных конструктивах производителей
оборудования.
Корпусные (box) – заключённые в корпус (типа системного
блока ПК.
7.
По области применения• универсальные общепромышленные;
• для управления роботами;
• для управления позиционированием и
перемещением;
• коммуникационные;
• ПИД-контроллеры;
• специализированные.
8.
По способу программирования• программируемые с лицевой панели
контроллера;
• программируемые переносным
программатором;
• программируемые с помощью дисплея, мыши
и клавиатуры;
• программируемые с помощью персонального
компьютера.
9.
По языкам программирования• Программируемые на на классических
алгоритмических языках (C, С#, Visual Basic);
• Прораммируемые на на языках МЭК 611313 ( языках программирования ПЛК).
10.
Архитектура11.
Процессорный модульПроцессорный модуль ПЛК выполняет следующие
задачи:
собирает данные из модулей ввода в память и отсылает
данные из памяти в модули вывода;
выполняет обмен данными с устройством для
программирования контроллера;
выдает метки часов реального времени;
осуществляет обмен данными с промышленной сетью;
реализует стек протоколов промышленной сети (для этой
цели
могут
использоваться
вспомогательные
коммуникационные процессоры);
выполняет
начальную
загрузку
и
исполнение
операционной системы;
исполняет
загрузочный
модуль
пользовательской
программы системы автоматизации;
управляет актами обмена с памятью.
12.
Характеристики процессорногомодуля
К основным характеристикам процессорного модуля относятся:
тип операционной системы (Windows CE, Linux, DOS, OS-9, QNX и др.);
наличие исполнительной среды для стандартной системы программирования на
языках МЭК 61131-3;
типы поддерживаемых интерфейсов (RS-232, RS-422, RS-485, CAN, USB, Ethernet и
др.);
типы поддерживаемых сетей (Modbus RTU, Modbus TCP, Ethernet, Profibus, CANopen,
DeviceNet и др.);
возможность подключения устройств индикации или интерфейса оператора
(светодиодного или ЖКИ индикатора, клавиатуры, мыши, дисплея с интерфейсами
VGA, DVI или CMOS, LVDS, трекбола и др.);
разрядность (8, 16, 32 или 64 бита);
тактовая частота микропроцессора и памяти;
время выполнения команд;
объем, иерархия и типы памяти (ОЗУ, кэш, ПЗУ - флэш, съемная флэш и др.);
типы встроенных функций (ПИД-регулятор, счетчики, ШИМ, алгоритмы
позиционирования и управления движением и др.);
бренд производителя (Intel, AMD, Atmel, Motorola).
13.
Источник питанияСтандартными напряжениями питания
ПЛК являются напряжения
• 12 В,
• 24,
• 48 В.
Источником электрической энергии
обычно является промышленная сеть 220В,
50 Гц.
14.
Характеристики ПЛКПроизводительность
ПЛК
оценивается
по
следующим параметрам:
длительность
контроллерного
цикла
(период
считывания значений из каналов ввода, обработки в
процессоре и записи в каналы вывода);
время выполнения команд (отдельно логических, с
фиксированной и с плавающей точкой);
пропускная способность шины между контроллером и
модулями ввода-вывода;
пропускная способность промышленной сети;
время
цикла
опроса
всех
контроллеров
в
одномастерной сети или цикл обращения маркера для
многомастерных сетей с маркером ;
время реакции.
15.
Функции самодиагностикиВ контроллерах для ответственных применений
могут быть предусмотрены следующие функции
самодиагностики :
обнаружение ошибок центрального процессора;
сигнализация о срабатывании сторожевого
таймера;
обнаружение отказа батареи или источника
питания;
обнаружение сбоя памяти;
проверка программы пользователя;
обнаружение выхода из строя предохранителя;
обнаружение обрыва или к. з. в цепи датчика и
нагрузки.
16.
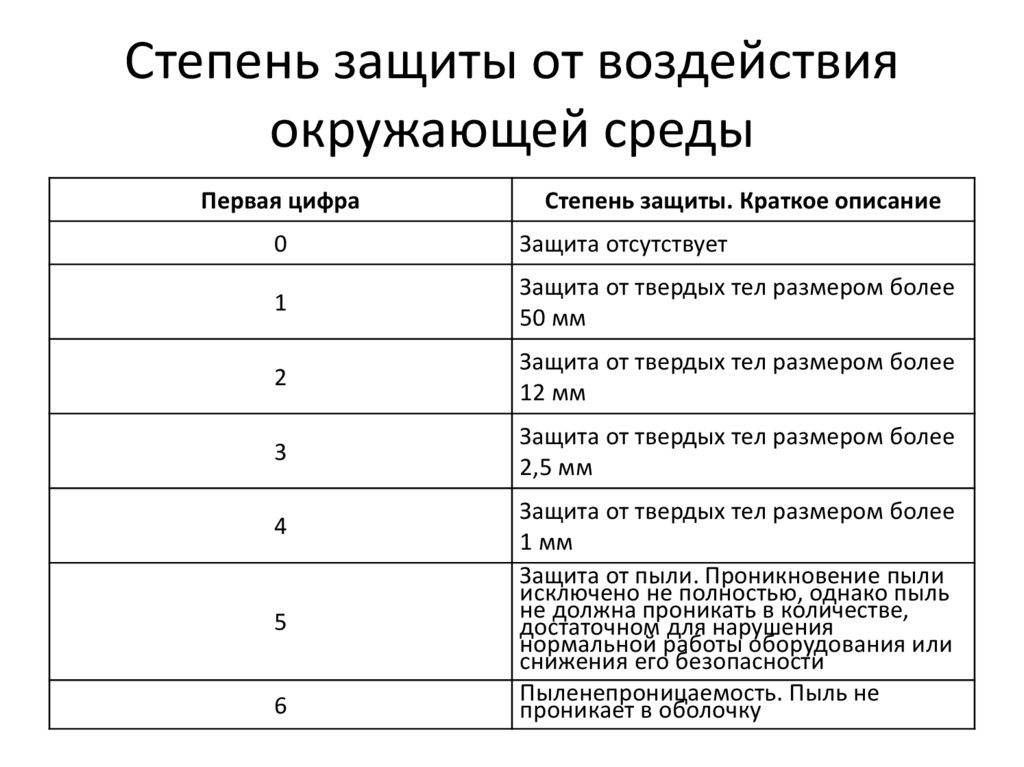
Степень защиты от воздействияокружающей среды
Первая цифра
Степень защиты. Краткое описание
0
Защита отсутствует
1
Защита от твердых тел размером более
50 мм
2
Защита от твердых тел размером более
12 мм
3
Защита от твердых тел размером более
2,5 мм
4
5
6
Защита от твердых тел размером более
1 мм
Защита от пыли. Проникновение пыли
исключено не полностью, однако пыль
не должна проникать в количестве,
достаточном для нарушения
нормальной работы оборудования или
снижения его безопасности
Пыленепроницаемость. Пыль не
проникает в оболочку
17.
Степень защиты от воздействияокружающей среды
Вторая цифра
Степень защиты. Краткое описание
0
Защита отсутствует
1
Защита от капель воды
2
Защита от капель воды при наклоне до
15º
3
Защита от дождя
4
Защита от брызг
5
Защита от водяных струй
6
Защита от волн воды
7
Защита при погружении в воду
8
Защита при длительном погружении в
воду
18.
Компьютер в качестве контроллераКомпьютер может быть превращен в
полноценный контроллер, если на него
установить:
систему программирования контроллеров;
электронный диск вместо обычного жесткого
диска;
платы ввода-вывода или внешние модули
ввода-вывода;
сторожевой таймер.
19.
Достоинства персональныхкомпьютеров
на порядок большая емкость оперативной памяти;
наличие жесткого диска с практически неограниченной емкостью;
на порядки более высокое быстродействие;
быстрое развитие аппаратного обеспечения (модернизация компьютеров происходит каждые 4..6
месяца, контроллеров - через 3...5 лет);
в несколько раз более низкая цена;
наличие большого числа специалистов, хорошо владеющих персональным компьютером;
поддержка компьютером DVD и CD-ROM дисководов, принтера, звуковых карт, систем
распознавания и синтеза речи, систем распознавания образов и текста, а также других средств,
недоступных для контроллера;
легкая замена компьютера на более мощный без изменения программного обеспечения;
поддержка клавиатуры, мыши и монитора;
возможность комплектации компьютера из частей, производимых большим числом независимых
производителей;
возможность создания всей системы автоматизации с помощью SCADA пакетов, без привлечения
систем программирования контроллеров и средств связи контроллера с компьютером;
наличие стандартов на шины, что обеспечивает большое число независимых поставщиков
стандартных компьютерных плат.
20.
Промышленные компьютеры
разъемы для сменных плат устанавливаются на пассивной объединительной
панели, а не на материнской плате;
для сменных плат используются надежные штырьковые разъемы;
для смены плат не нужно раскрывать корпус;
используются специализированные промышленные компьютерные шины
CompactPCI, AdvancedTCA, COMExpress, VME, VXI и др.;
вместо жесткого диска может быть использована флэш-память;
наличие сторожевого таймера;
применение вентиляторов со сменным пылеулавливающим фильтром или
отсутствие вентиляторов;
прочная несущая конструкция с надежным креплением плат пружинящими
планками с винтовыми зажимами;
применение блоков питания повышенной надежности, с защитой от к.з. по
выходу и с расширенным диапазоном сетевых напряжений (от 100 до 250 В);
резервирование блоков питания;
наличие энергонезависимой оперативной памяти (с аккумуляторным питанием),
которая сохраняет данные при сбоях или исчезновении питания;
в одном конструктиве и на одной объединительной шине может располагаться
несколько компьютерных систем;
наличие съемной флэш-памяти;
применение, кроме Windows, операционных систем DOS, Linux и операционных
систем реального времени.
21.
Устройства ввода-выводаУстройства
(модули)
ввода-вывода
являются интерфейсом между процессором
ПЛК и реальным миром.
Модули ввода соединяются с процессором
последовательной или параллельной шиной.
В контроллерах с распределенными
(удаленными)
модулями
ввода-вывода
наиболее распространены последовательные
шины на основе интерфейсов RS-485 и CAN.
22.
Микропроцессор типового модуляввода
Выполняет следующие функции:
реализует протокол обмена с ПЛК;
исполняет команды, посылаемые ПЛК в модуль;
реализует выполнение функций автоматической
калибровки, диагностики обрыва или к. з. в цепи
датчика;
преобразует форматы вводимых данных (инженерный
формат - в единицах измеряемой величины,
шестнадцатеричный формат, проценты от диапазона
измерений);
устанавливает скорость обмена с ПЛК (для ПЛК с
распределенными модулями ввода-вывода);
выполняет цифровую фильтрацию входного сигнала .
23.
Заключение• Модули
ввода-вывода
характеризуются
устоявшимся
набором
требований
к
их
функционированию и основным техническим
параметрам. Наиболее применяемые модули ввода
сигналов
термопар,
термопреобразователей
сопротивления, тензодатчиков и универсальные.
Улучшение технических характеристик модулей и
ПЛК определяется, в основном, производителями
полупроводниковой элементной базы, в первую
очередь микропроцессоров и аналого-цифровых
преобразователей, а также развитием технологии
монтажа электронных устройств.