


















 electronics
electronicsSimilar presentations:










Методы наблюдений в навигации
1.
3 – Методы наблюдений внавигации
2.
3.1 Общие определенияОсновная задача навигацииОпределение местоположения R (X,Y,Z) и
вектора скорости R(X’,Y’,Z’) объекта в
заданный момент времени t,
И прокладывание оптимального курса (A,D) к
заданной цели R0(X0, Y0, Z0).
Навигация: морская, аэронавигация …
3.
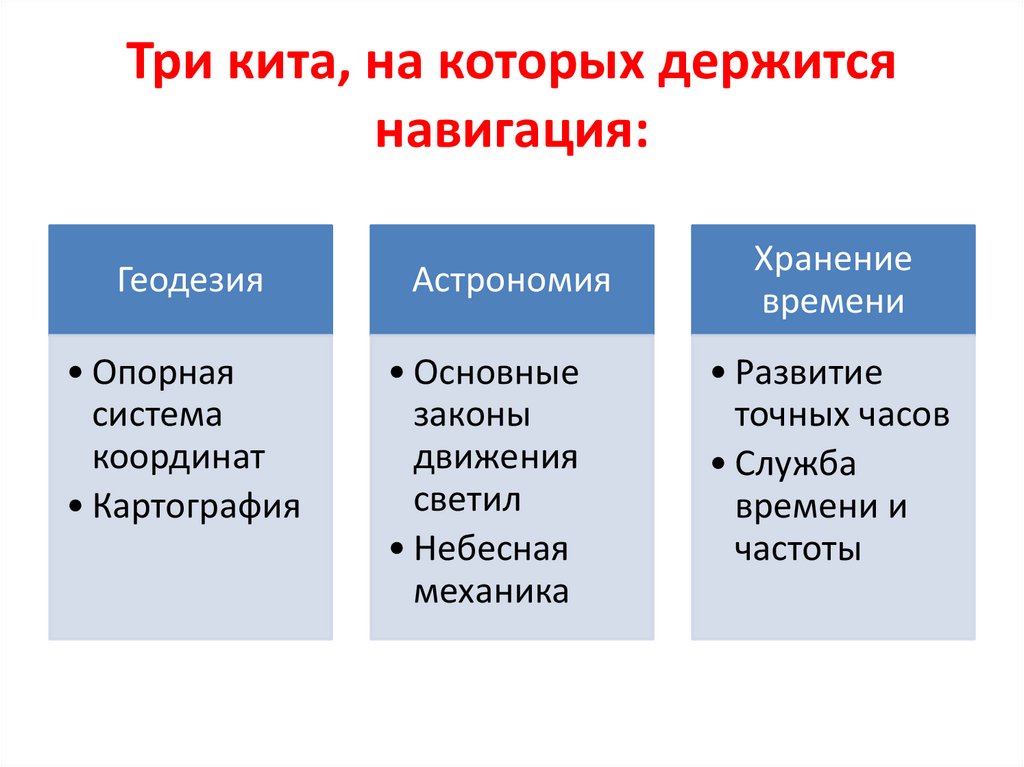
Три кита, на которых держитсянавигация:
Геодезия
• Опорная
система
координат
• Картография
Астрономия
• Основные
законы
движения
светил
• Небесная
механика
Хранение
времени
• Развитие
точных часов
• Служба
времени и
частоты
4.
Общие определения:В результате решения навигационной задачи
получается :
расширенный вектор состояния:
P = (R, dt, R’,ПОЗ,R*,C, …),
ПОЗ – параметры ориентировки Земли,
R* - положения наблюдаемых объектов,
С – параметры гравитационного поля Земли,
… - другие немоделируемые параметры.
R, R’ – векторы положения и скорости потребителя;
dt – поправка шкалы часов потребителя относительно
системной шкалы времени (СШВ)
5.
Общие определения• Измеряется:
Навигационный параметр НП
r – дальность, vr – радиальная скорость
Или радионавигационный параметр РНП
– задержка сигнала, fd – доплеровский
сдвиг частоты,
r = c · ;
vr = fd · l
6.
Общие определения• Поверхность положения – геометрическое
место точек с одинаковым значением
навигационного параметра.
• В ГНСС: дальность r –
сфера с r = const
• Пересечение двух поверхностей положения
– линия положения
(в ГНСС – окружность)
• Местоположение – точка пересечения 3
поверхностей положения или двух линий
положения. В ГНСС …
7.
Общие определенияНавигационная функция – функциональная
связь между расширенным вектором
состояния Р и навигационным параметром:
P = f(НП).
8.
• Что включает в себя расширенный векторсостояния?
• Какой навигационный параметр в ГНСС?
• Что такое поверхность положения? Что
представляет собой она в ГНСС?
• Что такое навигационная функция?
• Почему для определения
пространственного положения необходимо
наблюдать не менее 4 спутников ГНСС?
9.
Методы навигацииПо наземным ориентирам
Светотехнические (маяки, фонари)
Астрономические
Инерциальные (ИНС)
Радиотехнические наземные
Геотехнические
Методы КГ (радиотехнические:
радиодальномерные, доплеровские;
Оптические: LLR, SLR)
• Комбинированные (ИНС+ГНСС)
10.
3.2 Инерциальные методынавигации
• Автономные средства навигации, на борту
самолетов, ракет, КА, морских судов,
подлодок, в шахтах и скважинах.
• Основаны на счислении пути.
• Принцип работы:
1. Начальное выставление инерциального
прибора по вертикали и направлению на
Север
2. Измеряется ускорение R’’ –
интегрирование – R’ – интегрирование – R
11.
Комплексные системыастроинерциальной навигации
Гироскопы
Акселерометры
• Создание опорной
СК
• Измерение
ускорений R’(t)
Часы
• Измерение
моментов времени
Компьютер
• Интегрирование R’’,
• Вычисление скорости и
направления движения
• Компенсация ошибок
Сигнал на входы систем
автоматического
управления полетом и
навигационные
индикаторы пилотов
Корректор
• Внешние вспомогательные
средства астроориентации,
• Доплеровские РЛС,
• Навигационные спутники
• Введение поправок,
компенсирующих ошибки
12.
Измеряются:• Направление
(гироскоп, гирокомпас)
• Ускорение
(акселерометр)
• Время
(часы, стандарт частоты)
• Дополнительные данные для
коррекции
(навигационные звезды, ГНСС)
13.
Измерение ускорений. КолебанияМ.Шулера. Контур Шулера.
• Акселерометр измеряет ускорение:
a’ = a + g,
где g – ускорение силы тяжести.
g = f(f,l) – вычисляется как функция от
географических координат.
Инерциальные системы:
a = a’ – g – вычитание из выходных данных
вычисленного значения g.
14.
Колебания М.Шулера. КонтурШулера.
• Система с обратной связью второго порядка
ведет себя как генератор колебаний очень
низкой частоты в двух ортогональных
горизонтальных направлениях.
• Период колебаний на уровне моря 84 минуты.
• Колебания - по имени немецкого изобретателя
М.Шулера, запатентовавшего в 1908г первый
практически пригодный гирокомпас
15.
Колебания М.Шулера. КонтурШулера.
+ коррекция кориолисова ускорения
16.
Инерциальные приборы.• Варианты системы. В прежних системах инерциальной
навигации опорная система координат обеспечивалась
установкой акселерометров и гироскопов на
стабилизированной платформе в кардановом подвесе.
Такой подвес изолировал платформу от поворотов
летательного аппарата или судна. Это позволяло
удерживать акселерометры в неизменной ориентации
относительно Земли при движении объекта.
• В современных системах инерциальной навигации
применяются компьютеры, следящие за ориентацией
акселерометров. Такие системы называются
бесплатформенными. Выходные данные гироскопов
поступают непосредственно на компьютер, который
вычисляет мгновенное направление акселерометров в
опорной системе координат и соответствующие
корректирующие сигналы.
17.
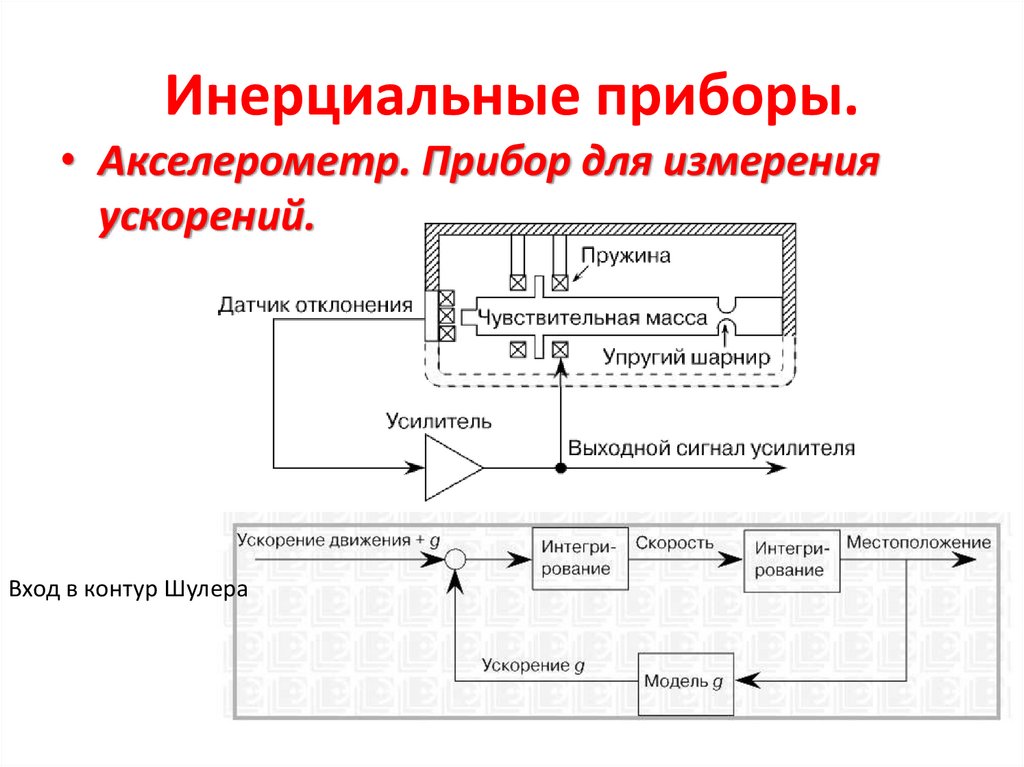
Инерциальные приборы.• Акселерометр. Прибор для измерения
ускорений.
Вход в контур Шулера
18.
Инерциальные приборы.Гироскоп – для определения ориентировки
системы (задание направления координатных
осей).
Оптический
Лазерный
Волоконнооптический
Механический
Вращающийся «волчок»,
поддерживающий
фиксированное
направление в
пространстве
19.
Гирокомпас: гироскоп, то есть вращающееся колесо(ротор), установленное в кардановом подвесе,
который обеспечивает оси ротора свободную
ориентацию в пространстве.
• Гиросфера гирокомпаса типа Аншютц — Кемпфе (изобр. 1903 г) в разрезе
20.
Лазерный гироскоп• Два лазерных луча,
генерируемые разрядом
между анодами и
катодом,
распространяются
навстречу друг другу в
кольцевом резонаторе,
образованном
зеркалами.
Взаимодействуя, лучи
дают
интерференционную
картину в виде системы
пятен, по перемещению
которой можно
определить поворот
ротора гироскопа.
21.
Волоконно-оптический гироскоп.• Лазерные лучи
распространяются по
замкнутому пути, частью
которого является
свернутое в спираль
оптическое волокно.
Поворот гироскопа
определяется
посредством
фотоприемника,
регистрирующего
интерференционную
картину пятен,
создаваемую лучами.
22.
Достоинства и недостаткиинерциальной навигации
Достоинства:
• Автономность
• Не зависят от погодных условий
• Не поддаются радиоэлектронному
подавлению
• Обеспечивают скрытность (не генерируют ЭМ
излучение)
• Работают там, где нет возможности
использовать ГНСС
23.
Достоинства и недостаткиинерциальной навигации
Недостатки:
• Необходимость настраивания не только по
скорости и местоположению, но и по
пространственному положению прибора
(акселерометры – для определения вертикали,
гироскопы – для определения вращения
Земли)
• Процесс «выставки» - несколько мин. И более
(гиротеодолиты – несколько часов). Чем
меньше время выставки, тем ниже
чувствительность и точность системы.
24.
Достоинства и недостаткиинерциальной навигации
Недостатки:
• Накопление ошибки со временем.
Накопленную ошибку можно
скорректировать с помощью внешних
вспомогательных средств (см. корректор)
25.
Примеры инерциальных навигационных системhttp://www.gnssplus.ru/company.html - Компания
ГНСС+
26.
Примеры инерциальныхнавигационных систем
• СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ
ЖЕЛЕЗНОДОРОЖНОГО ПУТИ (патент РФ №
2454498)
• Духин Степан Владимирович (RU),
Модестов Александр Николаевич (RU),
Нуйкин Алексей Викторович (RU),
Щербаков Владимир Васильевич (RU)
27.
• Перечислите методы навигации• Что такое счисление пути?
• Два основных прибора для инерциальной
навигации.
• Для чего нужен акселерометр?
• Для чего нужен гироскоп?
• С чем связаны колебания Шулера?
• Виды гироскопов.
• Достоинства и недостатки инерциальных
систем
• Примеры инерциальных навигационных
систем
28.
3.3 Радиотехнические методынавигации
• Радиодальномерные (расстояния)
• Доплеровские (радиальная скорость)
Наземная навигация
• Радиомаяки
• Гиперболические системы
29.
3.3.1 Радиомаяки• На берегу – радиомаяки. Передают
радиосигнал (местоположение маяка).
• На корабле: радипеленгатор. Измеряет
пеленг (направление).
• Угловая засечка (линии местоположения –
плоскости).
• Для небольших расстояний. Дешевизна.
30.
3.3.2 Гиперболические системы(наземные)
• Измеряется разность времени прихода
сигналов от двух разнесенных в пространстве
наземных радиостанций – разность
расстояний до радиостанций.
• Линии с одинаковой разностью времен
прихода сигналов от каждой пары р.ст. –
гиперболы на плоскости (близки к гиперболам
на поверхности Земли).
• Точка пересечения гипербол –
местоположение.
31.
Гиперболические системы• Низкие частоты, длинные волны, огибание
поверхности Земли, • Нет ограничения на прямую видимость.
• Сигналами системы можно пользоваться в
радиусе 2000 км от ее станций;
• В большинстве охватываемых зон точность
местоположения около 50-100 м
32.
Разностно-дальномерная система«ЛОРАН-С»
• Стандартная система для судоходства США
33.
Фазовая гиперболическаярадионавигационная система
«Омега» (OMEGA).
34.
«Чайка» — импульсно-фазовая радионавигационная система длинноволновогодиапазона, предназначенная для определения координат самолётов и кораблей
с погрешностью 50...100 м. Система была разработана в 1958 г. по заказу ВВС
СССР и является российским аналогом американской системы Loran-C. Главный
конструктор Э. С. Полторак.
35.
Современные наземныерадионавигационные системы
1. eLORAN – «улучшенная наземная система
навигации США» (точность метры-дециметры). С
характеристиками «улучшенной» системы eLORAN и
последней информацией по ее текущему
состоянию можно ознакомиться в новом
маркетинговом отчете АО НТЦ «Интернавигация».
2. Locata – новая разработка, обеспечивающая
субдециметровый уровень точности
позиционирования. Дополнение/замена GPS?
• Последние сведения о Locata – за 2015 г.
• Кому интересно – можно поискать
www.locata.com
36.
• Принцип навигации по радиомаякам.• Принцип навигации в гиперболических
системах
• Точность и дальнодействие
гиперболических систем навигации
• Примеры гиперболических навигационных
систем
37.
3.3.3 Доплеровские системы• Эффект Доплера: изменение частоты
принимаемого сигнала при движении источника
сигнала относительно приемника
• Изменение частоты сигнала:
Dw = w0 – w ≈ - w0(Vr/c),
w0 – опорная частота неподвижного источника
сигнала;
w – измеряемая частота;
Vr– радиальная скорость движения источника
сигнала;
c – скорость света.
38.
Навигационная функция(доплеровские системы)
Vr = Vr(R, R*, ГПЗ,ПВЗ, SDr),
R – положение пункта в ОЗСК,
R* - положение спутника в ОЗСК,
ГПЗ – параметры гравитац. поля Земли,
ПВЗ – параметры вращения Земли,
SDr - сумма поправок в измеренную скорость за
атмосферу, аппаратные задержки, и др.
39.
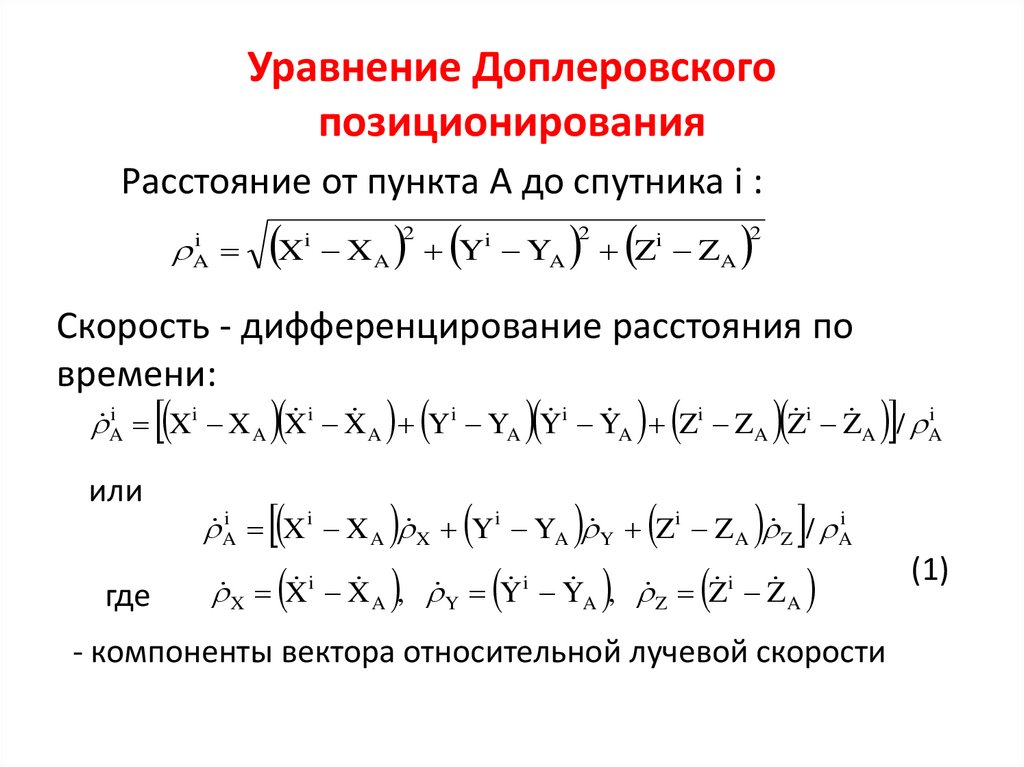
Уравнение Доплеровскогопозиционирования
Расстояние от пункта А до спутника i :
r Ai
X
i
XA
Y
2
i
YA
Z
2
i
ZA
2
Скорость - дифференцирование расстояния по
времени:
i X
A Yi YA Y
i Y
A Zi ZA Z
i Z
A / r Ai
r Ai Xi X A X
или
где
X
Z
Z
r Ai X i X A r X Y i YA r Y Zi Z A r Z / r Ai
r X
i
A , r Y Y
i Y
A , r Z
X
i
A
- компоненты вектора относительной лучевой скорости
(1)
40.
Доплеровские спутниковые системы• ГНСС первого поколения:
TRANZIT (США), ЦИКАДА (СССР)
Определение координат наземных пунктов
XA, YA, ZA
из решения системы уравнений вида (1),
где известны
координаты спутника Xi, Yi, Zi,
измерены
компоненты вектора скорости rX, rY, rZ
41.
ГНСС первого поколенияTRANZIT и ЦИКАДА
Характеристика
TRANZIT
ЦИКАДА
Период действия
1964 – 1996
1967 - 1997
Количество ИСЗ
5
6
Наклон орбиты
900
830
Высота
1075 км
1000 км
Период обращения
107 мин
105 мин
В СССР в 1984-1993 гг создана доплеровская геодезическая сеть (TRANZIT)
42.
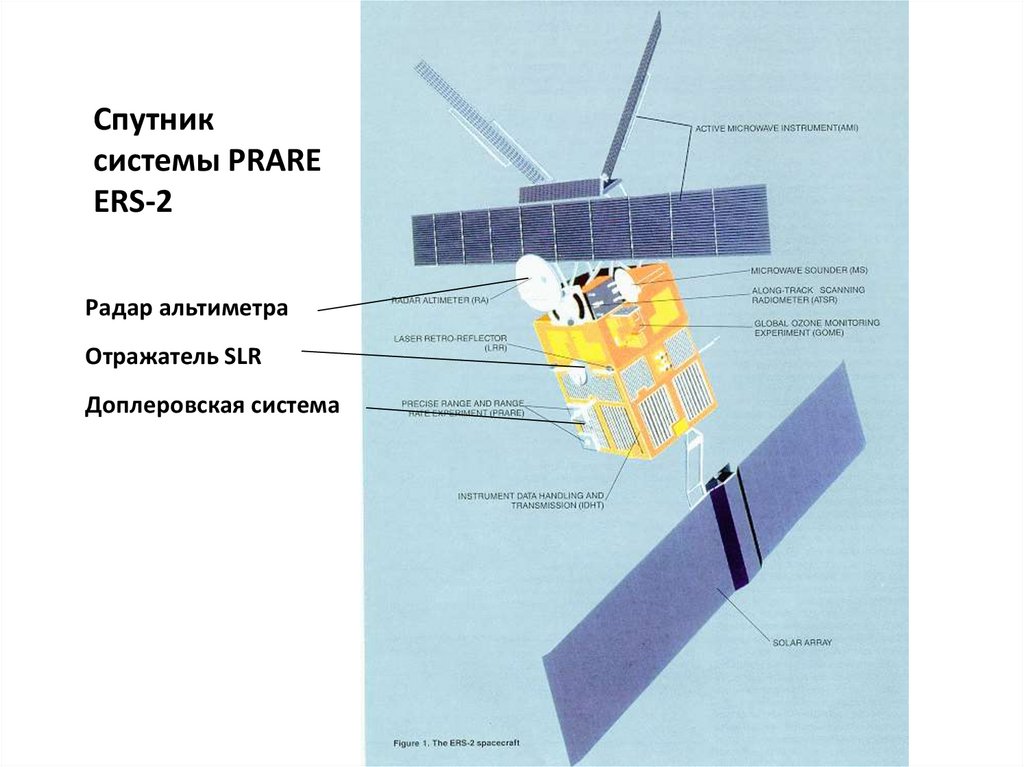
Доплеровские спутниковые системы• PRARE (Германия)
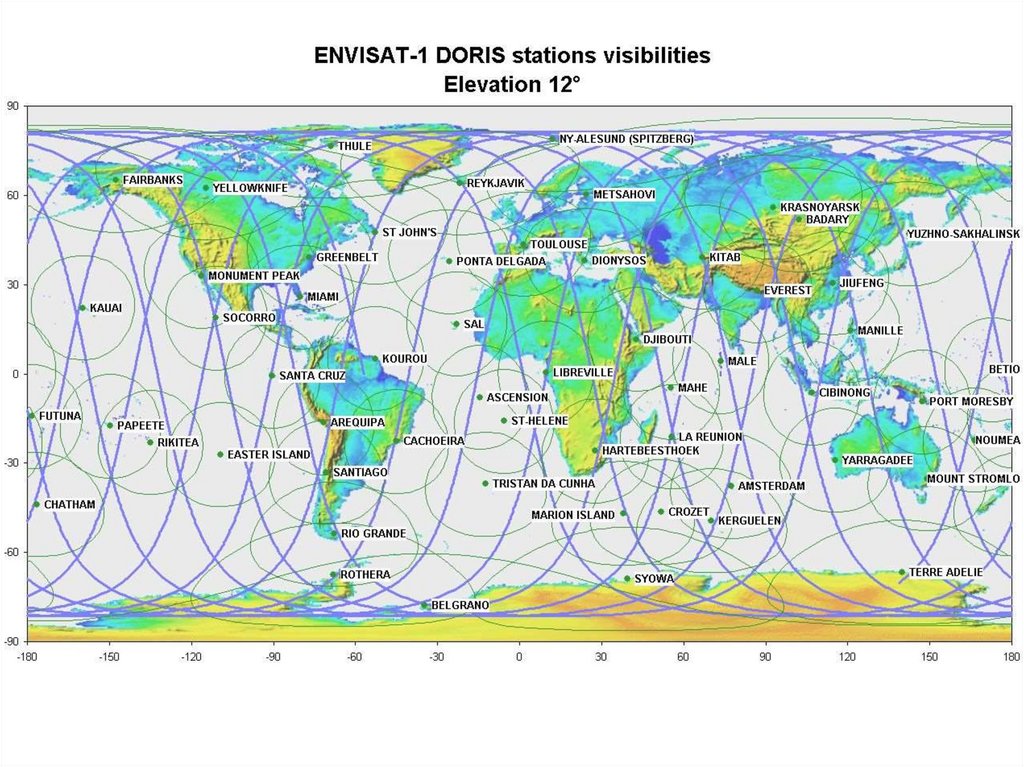
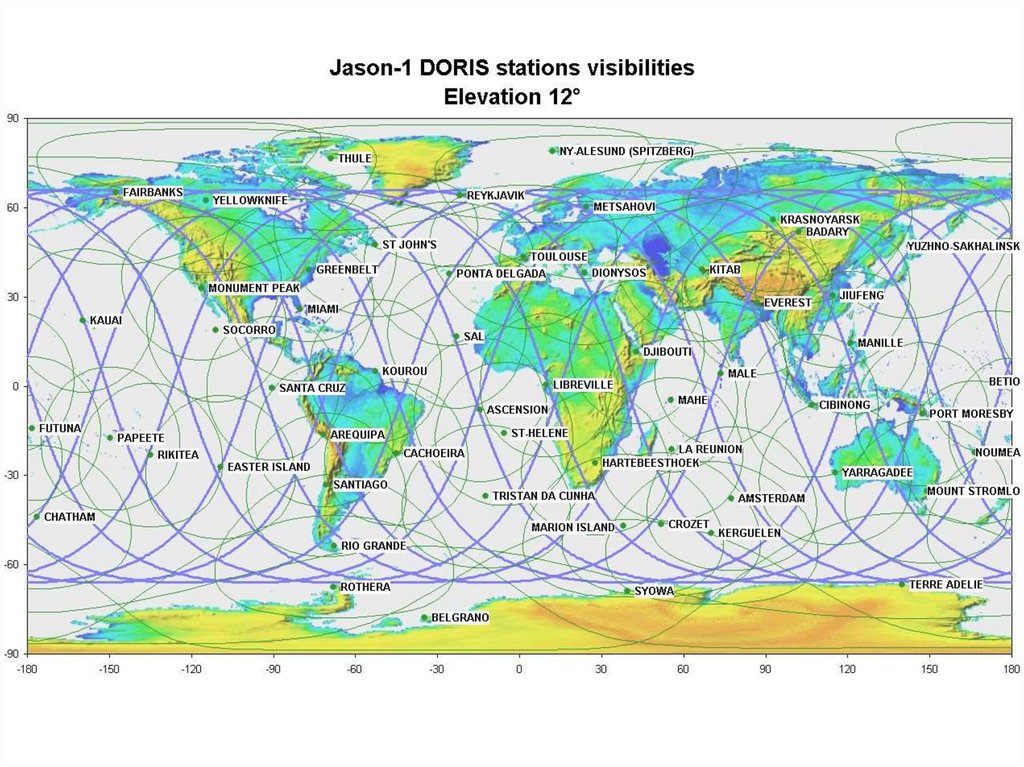
• DORIS (Франция)
Определение орбит ИСЗ (координат спутника Xi, Yi,
Zi)
из решения системы уравнений вида (1),
где выполняются
измерения скорости ИСЗ r
по сигналам от наземной сети автоматически
работающих радиомаяков
с известными координатами XA, YA, ZA
43.
PRARE – Precise Range And Range-RateEquipment
Работа системы – 1982 – 2006 (?)
3 сегмента системы:
• Сеть наземных станций (радиомаяков) по всему миру ;
• Космический сегмент ERS-2 (высота полета 780 км,
наклон орбиты 98,500)
• Контрольный сегмент (главная станция управления,
Потсдам, станция контроля времени и системных
команд, станция калибровки).
44.
Спутниксистемы PRARE
ERS-2
Радар альтиметра
Отражатель SLR
Доплеровская система
45.
DORIS – Doppler Orbitography andRadiopositioning Integrated by Satellite
46.
47.
48.
Задачи, решаемые с помощью DORIS, PRARE1. Точное определение орбит ИСЗ;
2. Определение координат и скоростей
движения станций;
3. Определение ПВЗ и ГПЗ;
4. Определение движения геоцентра;
5. Определение параметров ионосферы;
6. Мониторинг ледников, оползней,
вулканов.
49.
IDS – International DORIS Servicehttp://www.ids-doris.org/
50.
3.3.4 Спутниковая альтиметрия(измерение расстояния от ИСЗ до поверхности океана)
Радиовысотомер: высокочастотные импульсы
ЭМ волн сантиметрового диапазона,
продолжительностью 100 нс
Радиовысотомер, расположенный на борту ИСЗ, измеряет
разность высот двух поверхностей:
• средней уровенной поверхности морей и океанов и
• уровенной поверхности точки нахождения ИСЗ в момент
измерения
51.
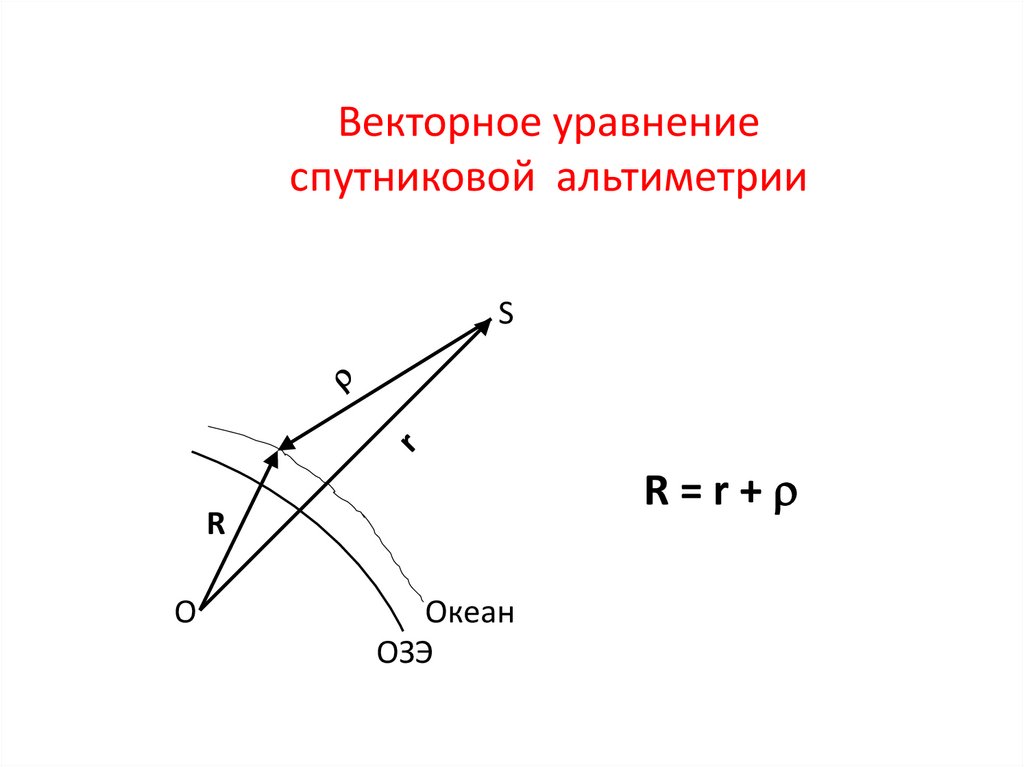
Векторное уравнениеспутниковой альтиметрии
S
R=r+r
R
О
Океан
ОЗЭ
52.
Навигационная функция(альтиметрия)
r r(геоид, R*, SDr),
R* - положение спутника
SDr - сумма поправок в измеренное
расстояние за атмосферу, аппаратные
задержки, и др.
53.
Задачи, решаемые с помощью спутниковойальтиметрии
1. Если известна орбита ИСЗ (вектор r), измерен r, то
определяется R => поверхность геоида в первом
приближении;
2. Если известна модель геоида (вектор R), измерен r, то
определяется r => орбита ИСЗ;
3. Если известны r, R, предвычислен r = R- r, измерен r’, то
определяются отклонения r - r’
=> эталонирование радиовысотомера, определение
амплитуды волн океана,
оценка точности прогноза орбиты ИСЗ,
и т.д.
54.
Спутники, поддерживающие альтиметрию55.
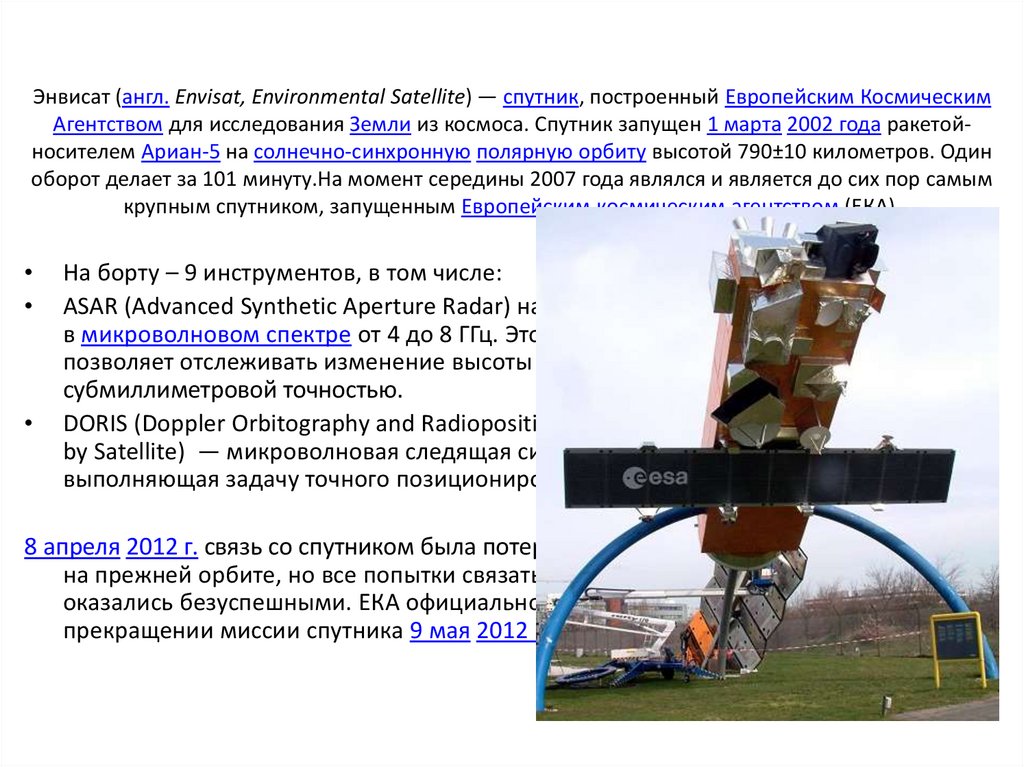
Энвисат (англ. Envisat, Environmental Satellite) — спутник, построенный Европейским КосмическимАгентством для исследования Земли из космоса. Спутник запущен 1 марта 2002 года ракетойносителем Ариан-5 на солнечно-синхронную полярную орбиту высотой 790±10 километров. Один
оборот делает за 101 минуту.На момент середины 2007 года являлся и является до сих пор самым
крупным спутником, запущенным Европейским космическим агентством (ЕКА).
На борту – 9 инструментов, в том числе:
ASAR (Advanced Synthetic Aperture Radar) наблюдает Землю
в микроволновом спектре от 4 до 8 ГГц. Этот инструмент
позволяет отслеживать изменение высоты поверхности с
субмиллиметровой точностью.
DORIS (Doppler Orbitography and Radiopositioning Integrated
by Satellite) — микроволновая следящая система,
выполняющая задачу точного позиционирования спутника.
8 апреля 2012 г. связь со спутником была потеряна. Он остался
на прежней орбите, но все попытки связаться с аппаратом
оказались безуспешными. ЕКА официально объявило о
прекращении миссии спутника 9 мая 2012 года[1
56.
3.3.5 Радиоинтерферометрия сосверхдлинной базой РСДБ (VLBI)
Наблюдаемые объекты:
удаленные
внегалактические
радиоисточники – квазары и
радиогалактики
База:
Земля – Земля
Земля – Спутник
Спутник – Спутник
Земля - Луна
57.
Навигационная функция(РСДБ)
Измеряемая величина:
Dt - разность времени между приходом радиосигнала на
антенны РСДБ-комплекса:
Dt = Dt(DR, r*, ПОЗ, ГПЗ, SDr),
DR - параметры базы,
r* - положение радиоисточника (направление),
ПОЗ - параметры ориентировки Земли:
ПВЗ+ (dy, de) – поправки к двум углам нутации,
ГПЗ – параметры грав.поля Земли,
SDr - поправки в измеренные величины за атмосферу,
аппаратн.задержки и пр.
58.
РСДБрешаемые задачи:
реализация инерциальной небесной
системы координат ICRF;
реализация инерциальной земной системы
координат ITRF. Системы ITRF и ICRF
связаны между собой через параметры
ориентировки Земли;
определение параметров ориентировки
Земли;
определение параметров ГПЗ; и т.д.
59.
Радиоинтерферометрическая сеть"Квазар-КВО", Россия, Институт прикладной
астрономии РАН,СПб
Обсерватории:
Светлое,
Зеленчукская,
Бадары,
Уссурийск
Центр обработки информации:
ИПА РАН, СПб
60.
Радиоастрономическая обсерватория“Светлое”
61.
Радиоастрономическая обсерватория"Бадары"
62.
Радиоастрономическая обсерватория“Зеленчукская”
63.
IVS – Международная РСДБ-служба для геодезии иастрометрии www.ivs.org
• Основана в 1999 г для поддержки программ для геодезических,
геофизических и астрометрических исследований.
• Более 30 станций сети, распределенных по всей Земле, с небольшим
дефицитом в южном полушарии
• 3 центра управления: NASA-GSFC, NEOS, Geodetic Institute of the
University of Bonn
• 5 корреляторов NEOS, NASA (США), BKGMPI (Германия), GSI (Япония),
СRL (Япония)
• 6 дата-центров, 19 аналитич.центров, 9 технологич. центров, 1
координационный центр
• 30 членов организации в 15 странах и более чем 230 индивидуальных
членов ассоциации
64.
3.3.6 Геодезический спутник ГЕОИКНазначение
• создание региональных геодезических сетей
• работы по изучению топографии Мирового океана
• уточнение формы Земли и координат ее центра масс
• установление системы координат ПЗ-90
Основные технические
характеристики
• высота круговой орбиты 1500 км
• период обращения 116 мин
• наклон орбиты 74, 83 градуса
• масса 1610 кг
Бортовой ретрансляционный комплекс
• радиовысотомер (спутниковая альтиметрия)
• доплеровская система
• ретранслятор дальномерной запросной системы
• система световой сигнализации (для фотографирования с
наземных фотоастрономических установок)
• уголковые отражатели для лазерной локации
65.
ГЕО-ИК-2• Гео-ИК-2 — российская спутниковая система, которая
должна была состоять из двух космических аппаратов,
предназначенных для проведения геодезических
измерений. Разработку и создание системы вело ОАО
«Информационные спутниковые системы» имени
академика М. Ф. Решетнёва. С запуском спутника «Гео-ИК2» после длительного перерыва должно было начаться
возобновление космической геодезической программы
России.
• Запуск первого спутника в феврале 2011 года окончился
неудачей, спутник был выведен на нерасчетную орбиту.
66.
ГЕО-ИК-2Предназначение спутниковой системы
• определение параметров гравитационного поля Земли
• построение высокоточной геодезической сети в
геоцентрической системе координат
• определение движений континентальных литосферных
плит, земных приливов, скорости вращения Земли и
координат полюсов.
• решение ряда прикладных задач,требующих оперативного
определения координат наземных пунктов, в том числе:
создание региональных геодезических сетей,
дистанционное зондирование Земли, определение
морского геоида, мониторинг ледовой обстановки.
67.
ГЕО-ИК-2• Оборудование спутника
• радиовысотомер «Садко» производства Thales Alenia
Space;
• аппаратура доплеровской системы;
• бортовое синхронизирующее устройство;
• оптическая ретрорефлекторная антенна.
• Параметры орбиты
• Оба аппарата системы должны были быть выведены на
солнечно-синхронную орбиту с высотой около 1000 км и
наклонением 99,4º.
68.
Продолжение ГЕО-ИК-2• 04.06.2016 – Гео-ИК2 №2 (Космос-2517) –
запуск с космодрома Плесецк
• 30.08.2020 - Гео-ИК2 №3 (Космос-2540) запуск с космодрома Плесецк
Спутники военного назначения
69.
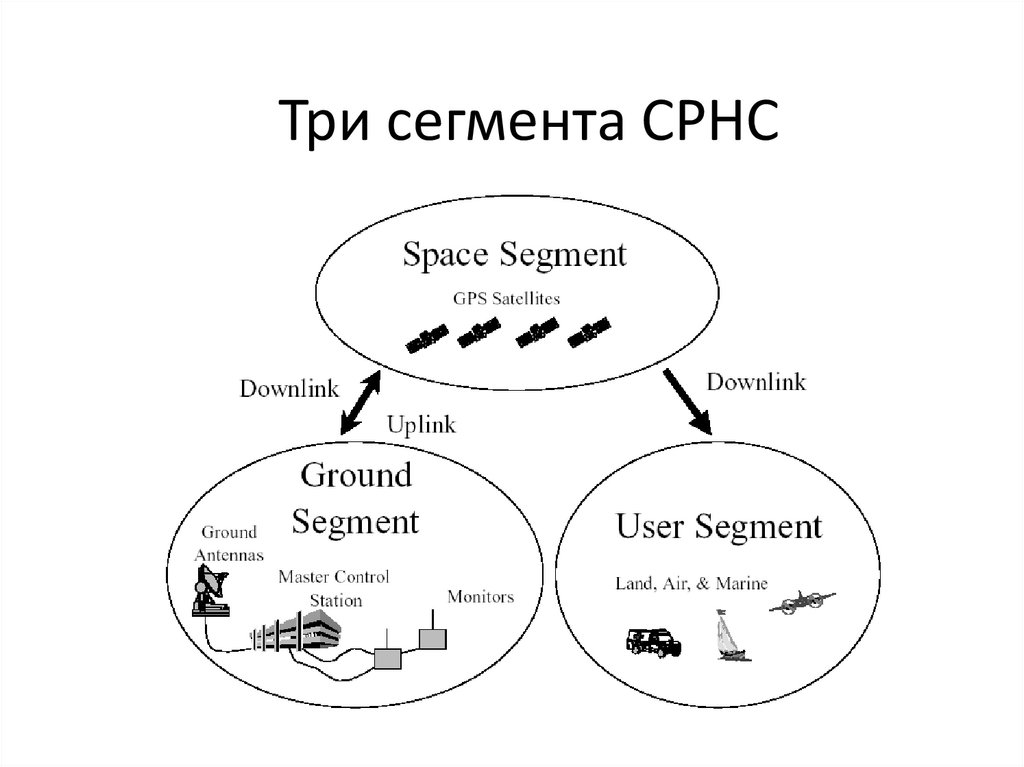
3.3.7 Спутниковые радиотехнические навигационныесистемы второго поколения. Радидальномерные измерения
• GPS – Global Position System (США) –
созвездие NAVSTAR
• ГЛОНАСС – Глобальная навигационная
спутниковая система (СССР – Россия)
• GALILEO (Европа)
• Бэйдоу (Китай) – созвездие KOMPASS
70.
3.3.7 Радиодальномерные измерения,навигационная функция
r r(R, R*, Dt,ПВЗ, ГПЗ, SDr),
R – положение пункта в ОЗСК,
R* - положение спутника в ОЗСК,
Dt - поправка часов приемника,
ПВЗ – параметры вращения Земли:
ГПЗ – параметры гравитац. поля Земли,
SDr - сумма поправок в измеренное расстояние
за атмосферу, аппаратные задержки, и др.