































 mechanics
mechanics electronics
electronicsSimilar presentations:






")



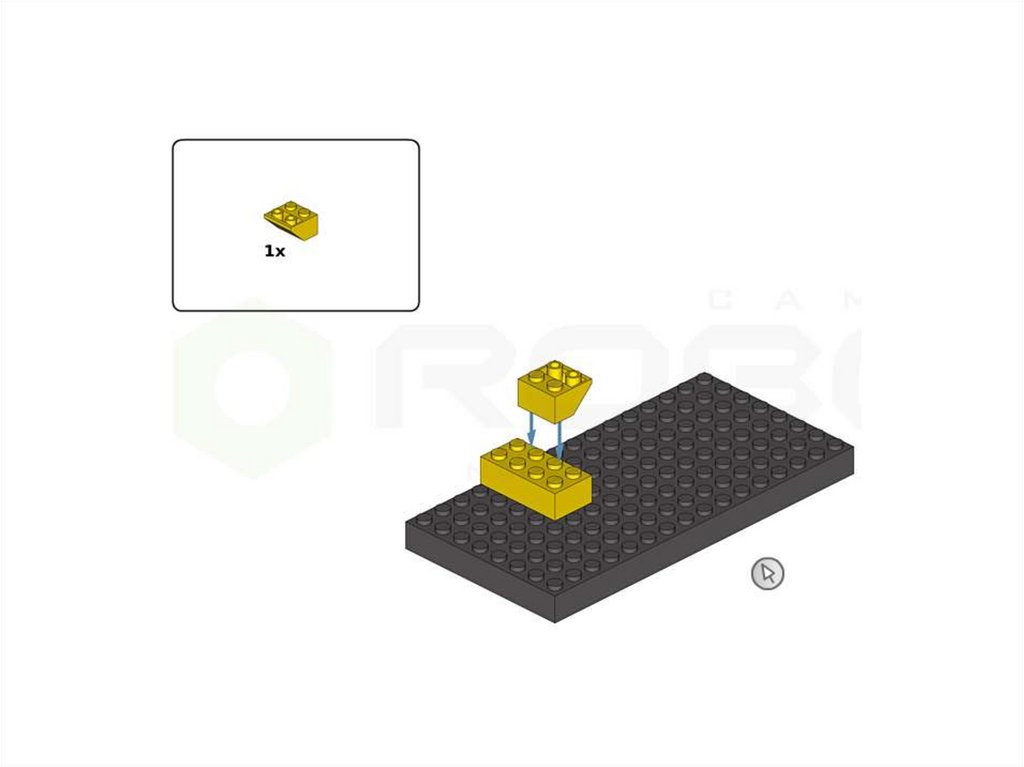
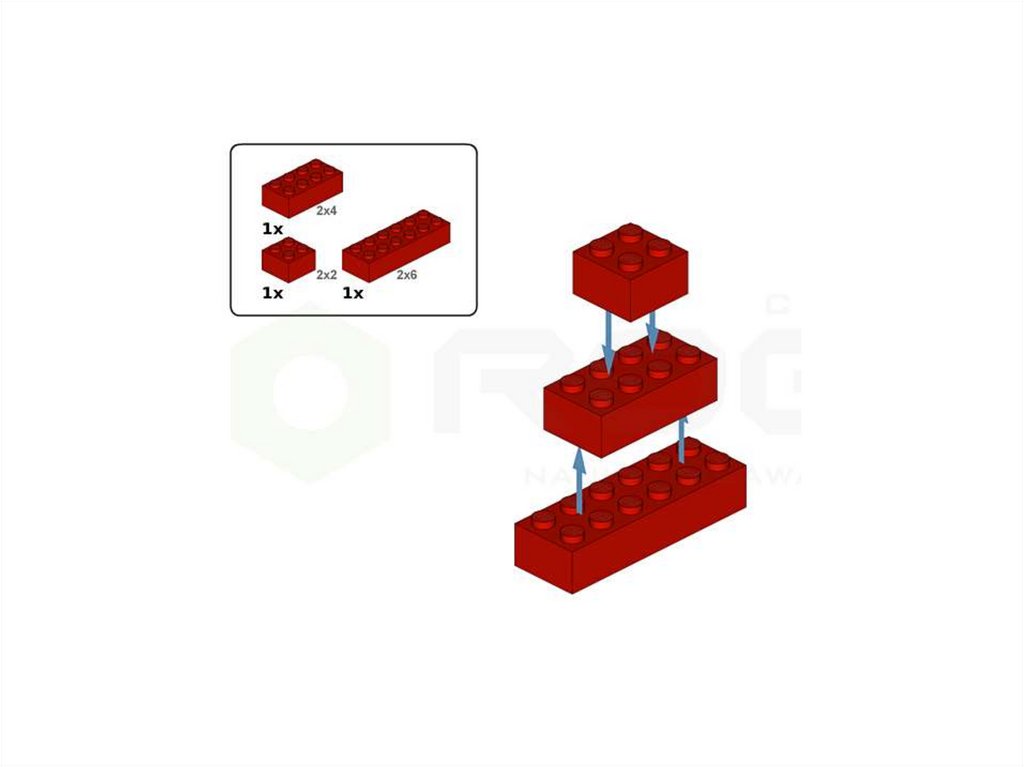
Подъемный кран. Lego. (Занятие 5)
1.
ПОДЪЕМНЫЙ КРАН1
2.
Подъемный кран3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
29.
30.
31.
32.
33.
34.
35.
36.
37.
38.
39.
40.
41.
42.
43.
44.
45.
46.
47.
48.
49.
50.
51.
52.
53.
54.
55.
56.
57.
58.
59.
60.
61.
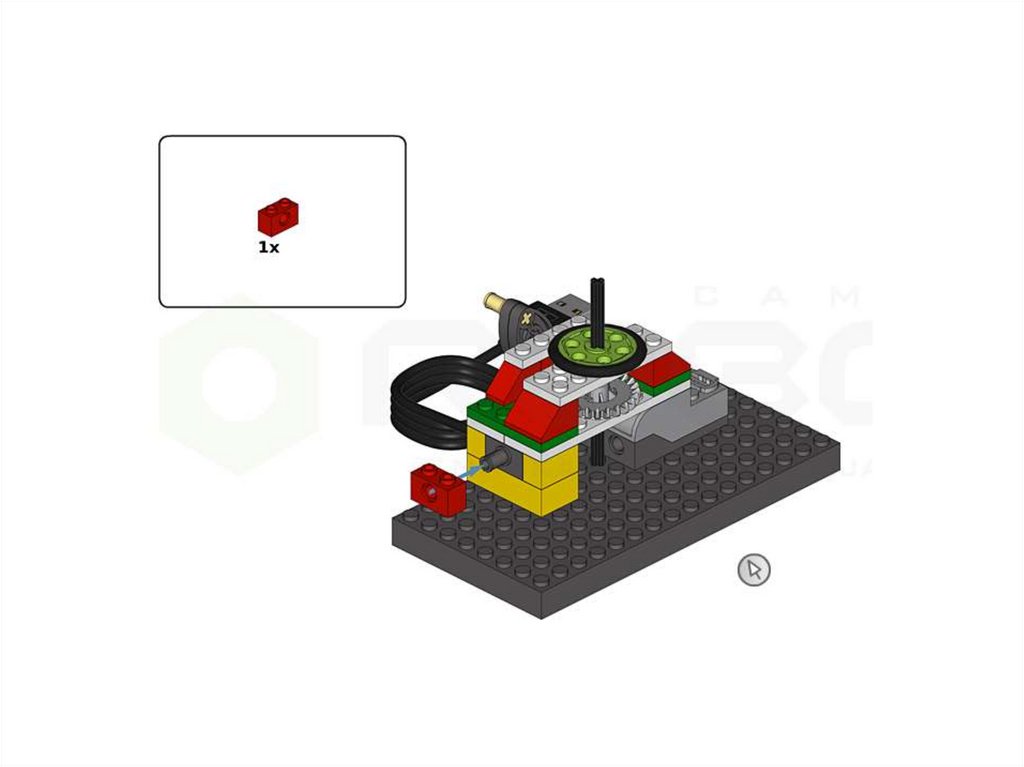
Наша конструкция - модельбашенного крана.
Такой кран позволяет переносить
большие грузы с места на место в
пределах досягаемости его стрелы.
62.
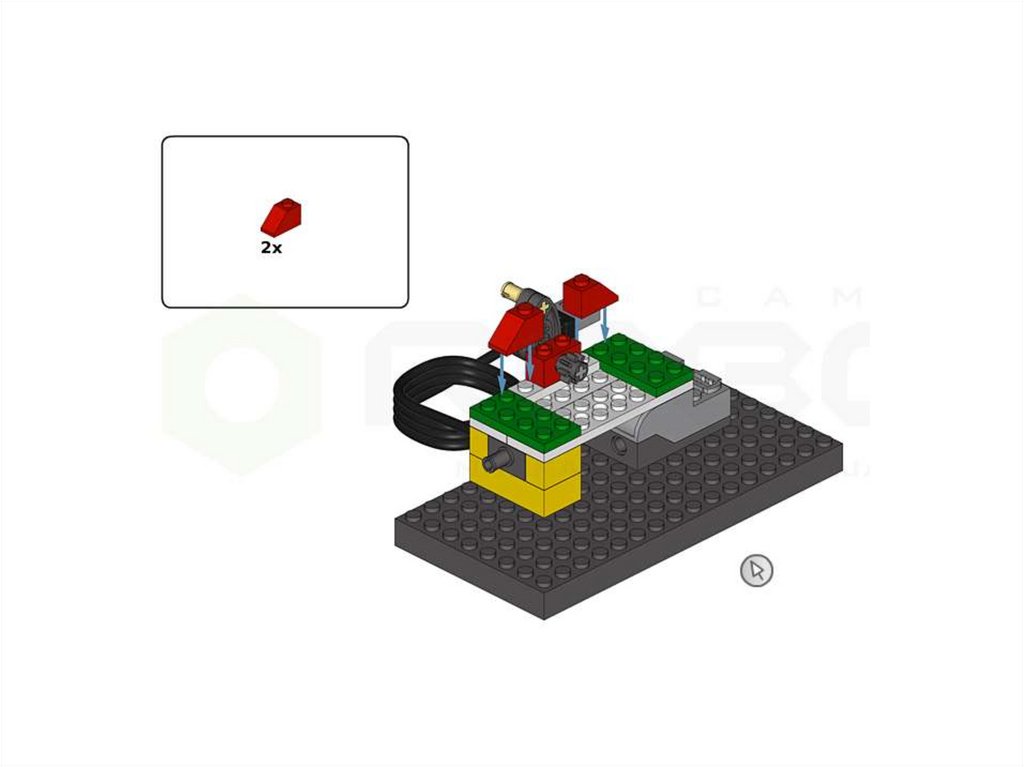
1. Башня подъемного крана можетвращаться благодаря небольшой
рукоятке, расположенной возле
основания конструкции. Зубчатая
передача соединяет рукоятку с
башней через шестеренки,
соединенные между собой под
углом 90°.
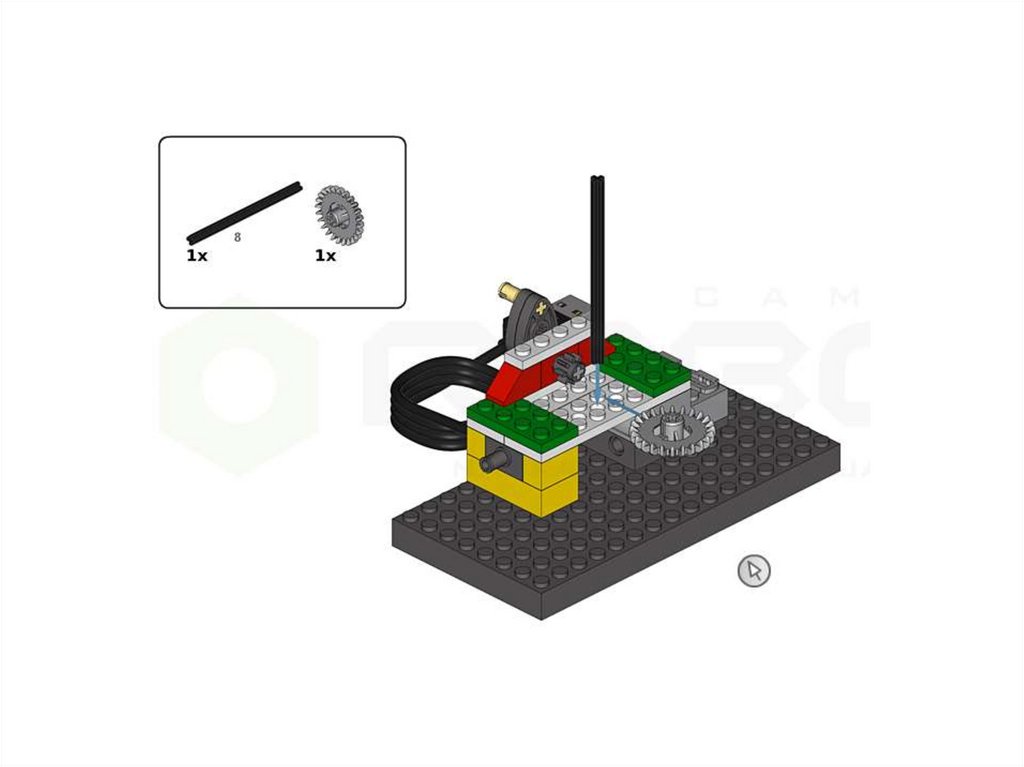
2. Обрати внимание, что башня
вращается медленнее рукоятки изза того, что количество зубьев
шестеренки, соединенной с
рукояткой, меньше количества
зубьев шестеренки, соединенной с
башней.
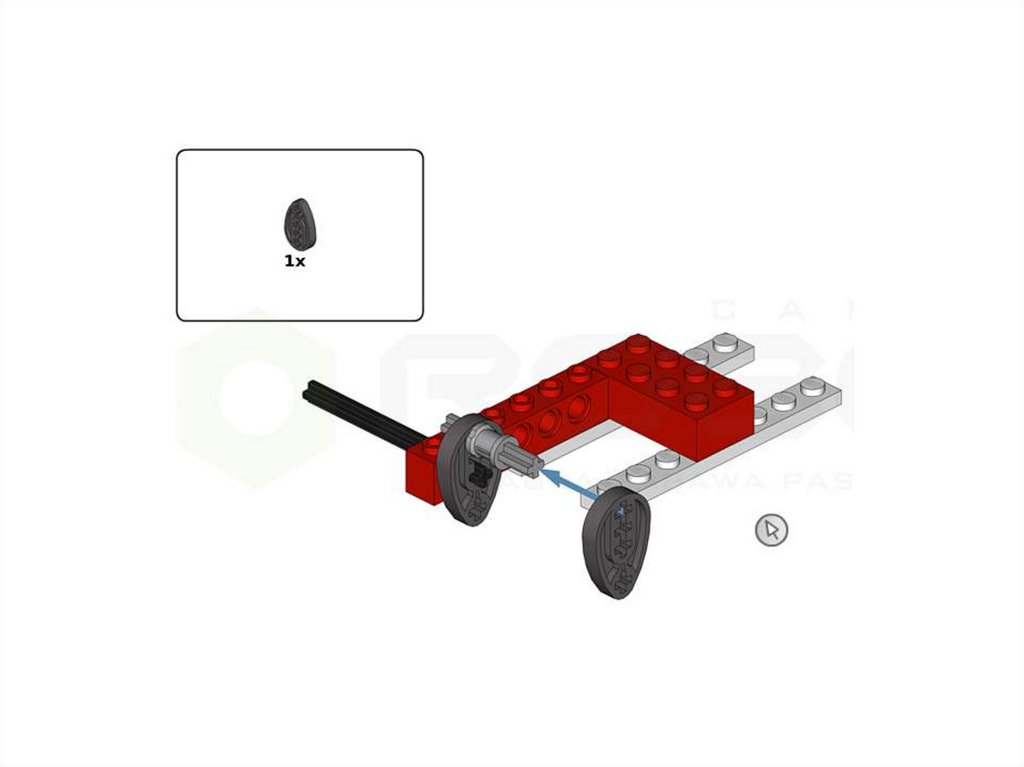
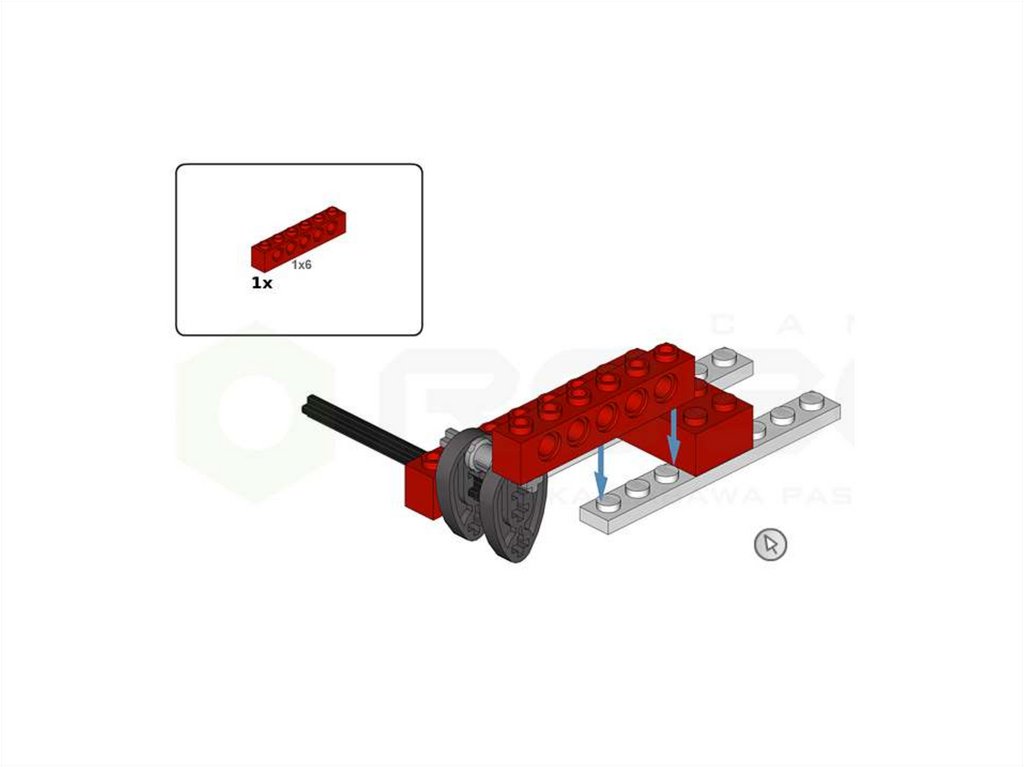
63.
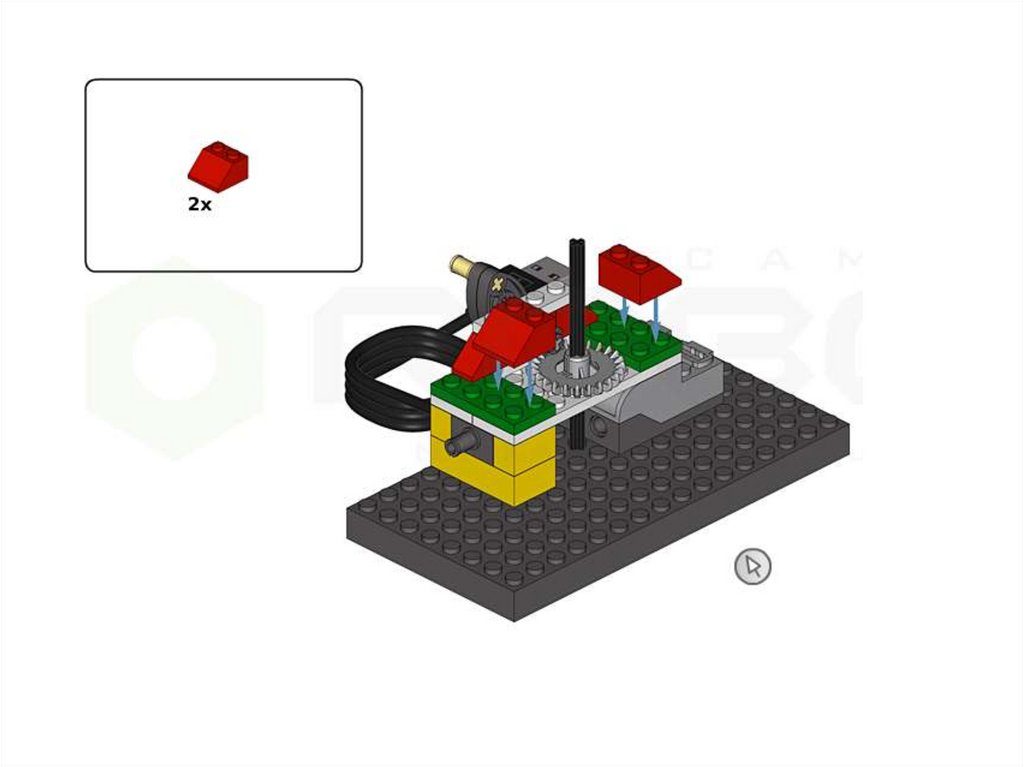
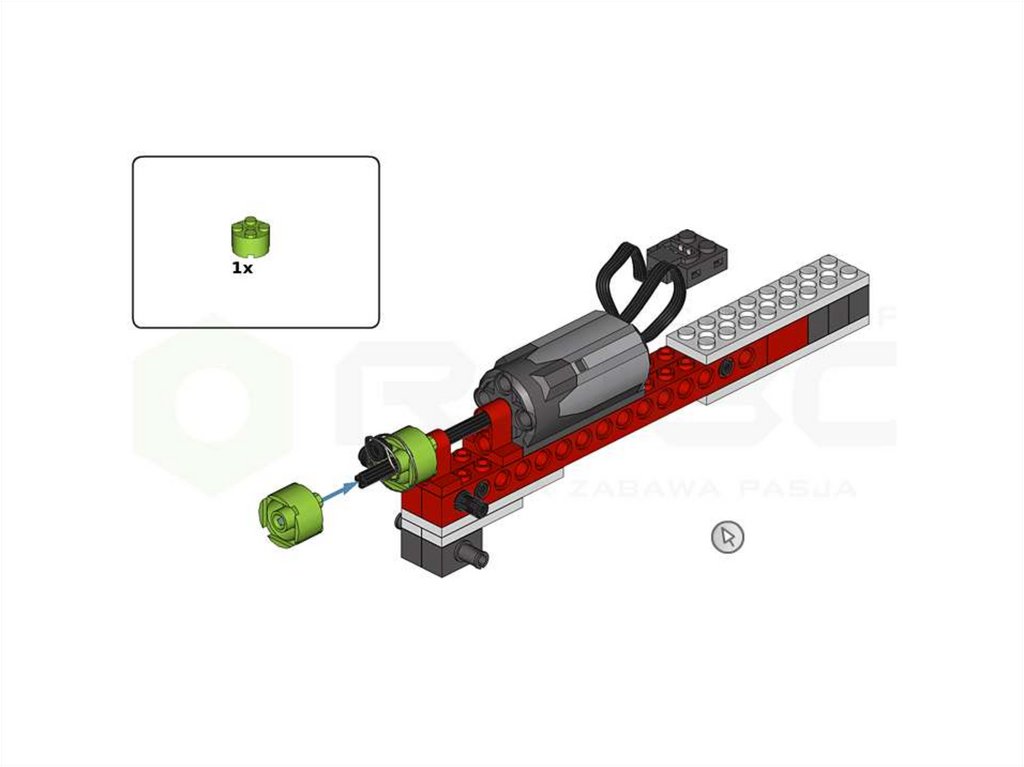
Груз поднимается вверх с помощьютроса, который наматывается на
барабан.
1. Двигатель WeDo, ротор которого
вращается в соответствующую
сторону, приводит в действие весь
подъемный механизм.
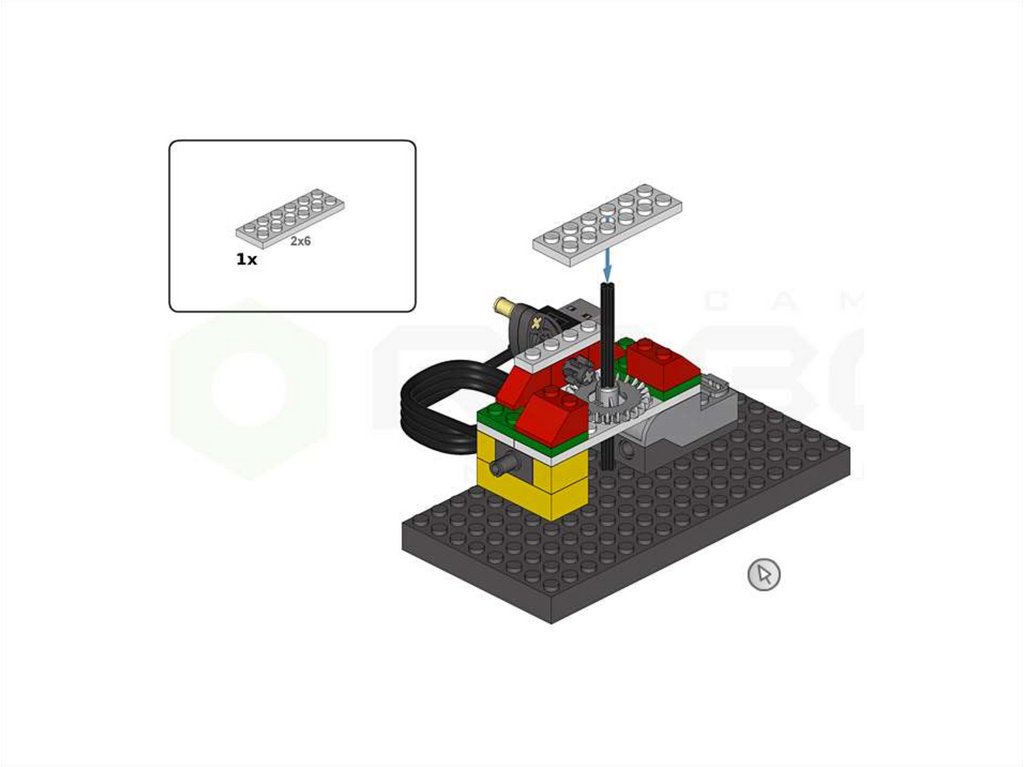
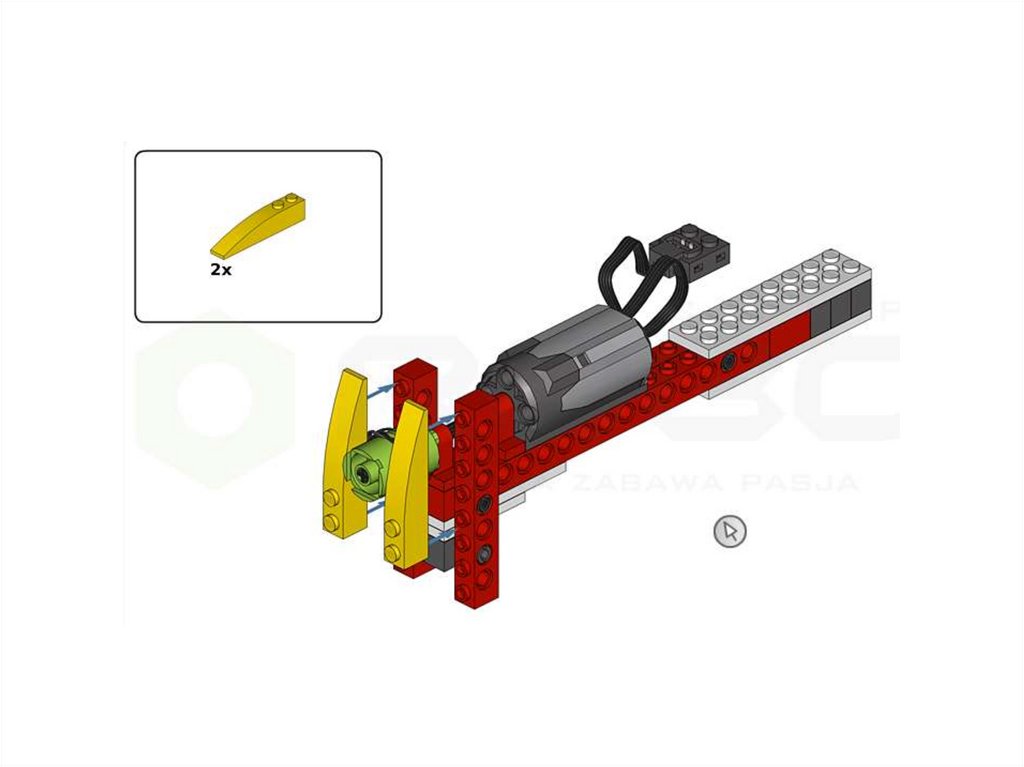
2. Барабан похож на цилиндр, на
который наматывается трос. Чем
больше диаметр барабана, тем
быстрее наматывается трос. Если
трос полностью размотан, то
неважно, в какую сторону будет
вращаться барабан – трос будет
наматываться на него в любом
случае.
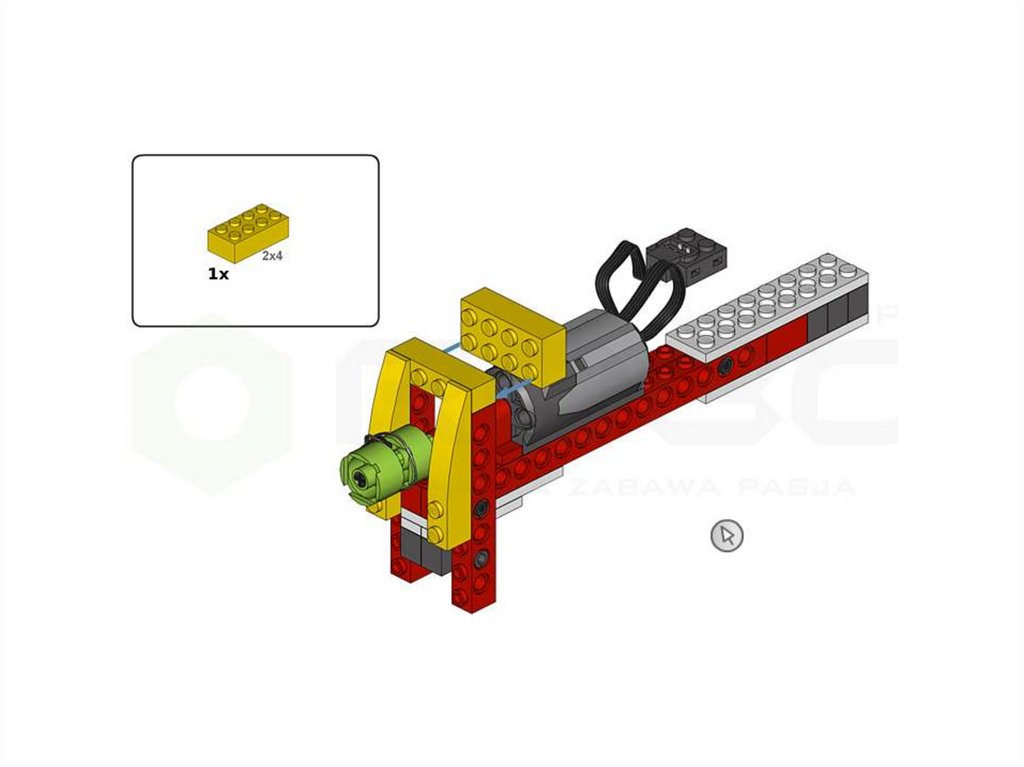
3. Трос вместе с зацепом (крюком)
будет перемещаться вверх и вниз.
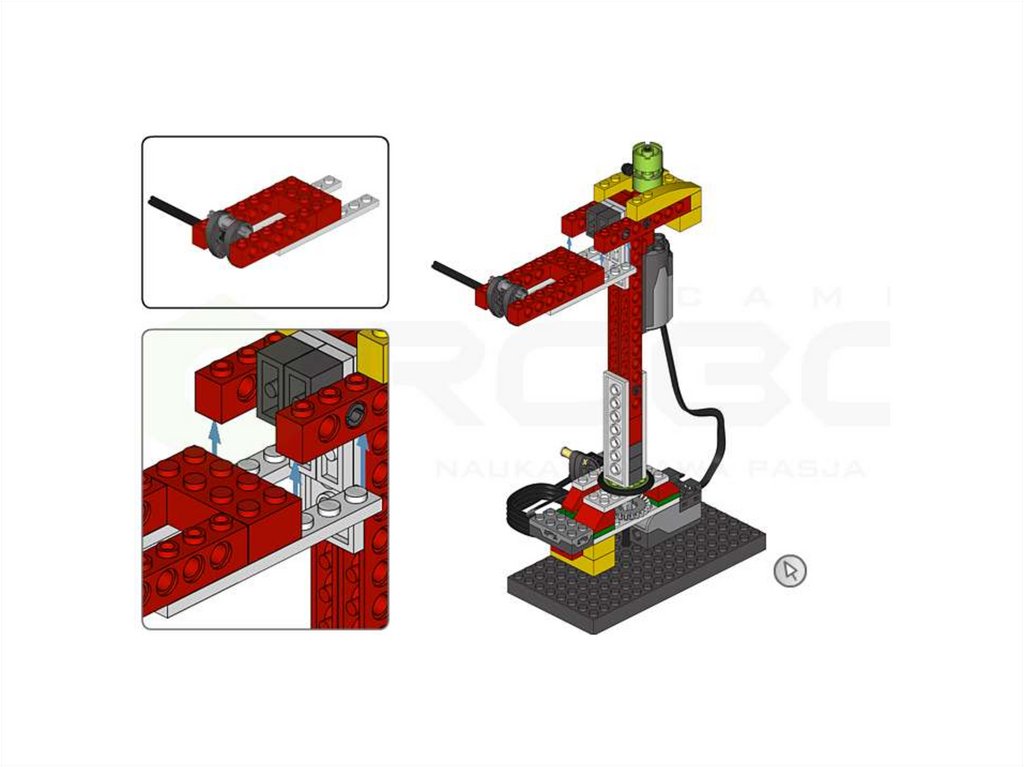
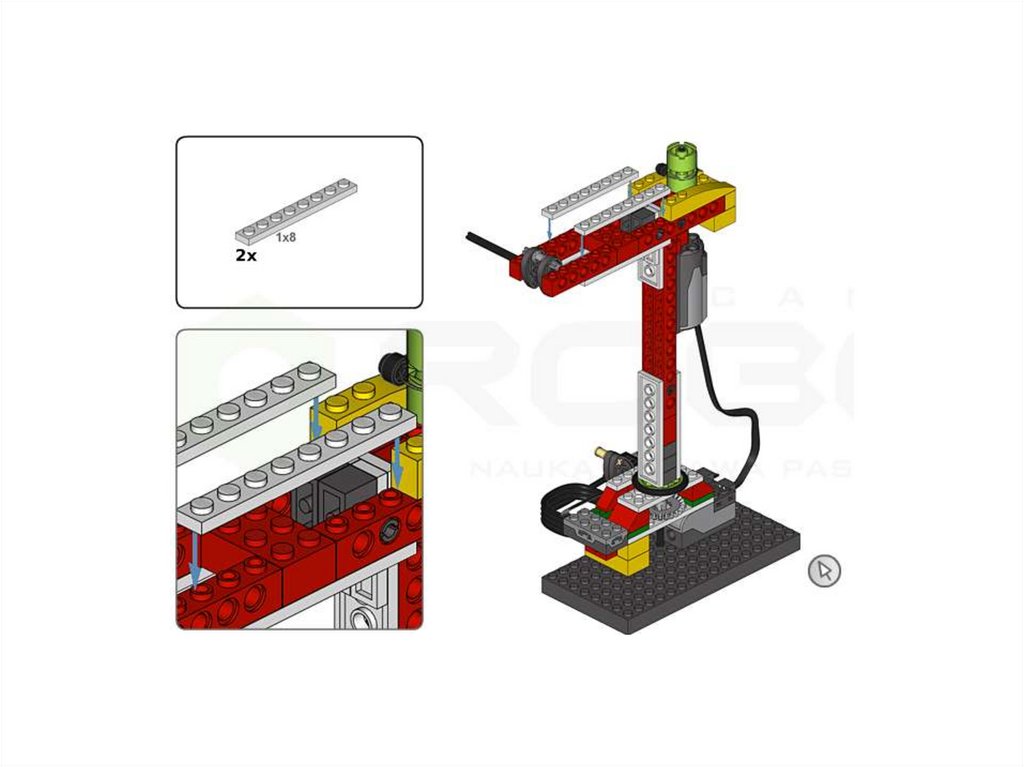
64.
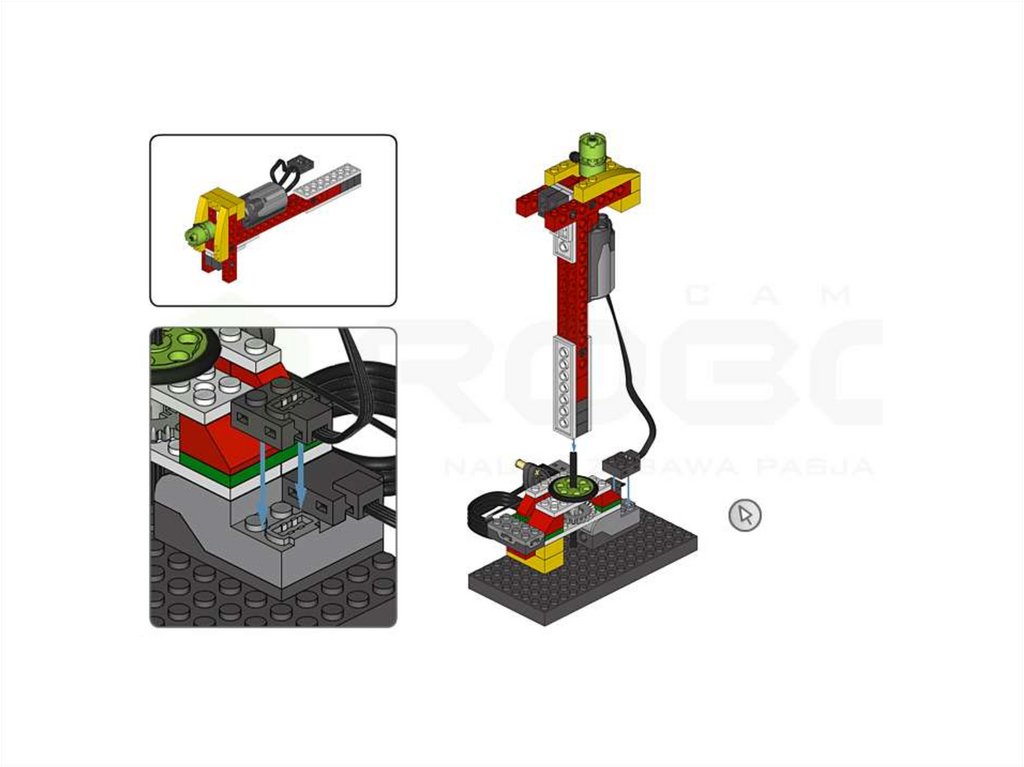
1. Когда ты наклонишь датчик,прикреплённый к основанию
крана, то запустишь двигатель.
2. Двигатель вращает катушку, на
которую наматывается трос.
3. Груз, прицепленный на конце
троса, может подниматься
или опускаться.
4. Перед опусканием груза ты
можешь перевернуть плечо
подъёмного крана, вращая
рукоятку у основания.
65. Программирование
ЗаданиеСоздайте программу, по которой робот может
поднимать и опускать груз в зависимости от
положения датчика наклона. Мотор должен
останавливаться, когда датчик в
горизонтальном положении
66.
1. Блоки с изображением конверта связаныдруг с другом и позволяют передавать
управление различным сегментам
программы.
67.
1. Блок с изображением песочных часов приостанавливает выполнениепрограммы до момента выполнения некоторого условия – наклона
датчика вверх.
2. В этом случае ожидание длится до момента наклона датчика вниз.
68.
1. Этот блок задает скорость вращения ротора двигателя. Малыеобороты обеспечивают бóльшую точность работы.
2. Двигатель должен работать до момента выравнивания датчика
наклона.