











")

")









 electronics
electronicsSimilar presentations:




")





Электромагнитный переходный процесс в электрических машинах
1.
5. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕССВ ЭЛЕКТРИЧЕСКИХ МАШИНАХ
2.
Аналитическое исследование электромагнитного переходногопроцесса в электрических машинах представляет достаточно
сложную задачу.
Для её упрощения вводится ряд допущений:
• учитывается только периодическая слагающая тока статора;
• скорость ротора считается неизменной и равной ;
• рассматривается синхронная машина, работающая отдельно
от других источников питания;
• трансформаторные ЭДС принимаются равными нулю,
вследствие того, что обобщённые векторы потоков
изменяются медленно.
Таким образом, в дальнейшем рассматривается в известной мере
идеализированная машина. Это вносит погрешности в оценку
отдельных величин. Однако, как показывают сопоставления
полученных величин с экспериментальными данными, обычно
погрешности находятся в допустимых для практических расчётов
пределах.
3. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
5.1. Уравнения синхронной машины вфазных координатах
4.
Принципиальная схема синхронной машины, роторкоторой имеет явновыраженные полюсы
A
d
Bк
q
C
Uf
iC
if
A
iB
Aк
iA
B
C
uC
B
uB
A
uA
Cк
B
C
0
5.
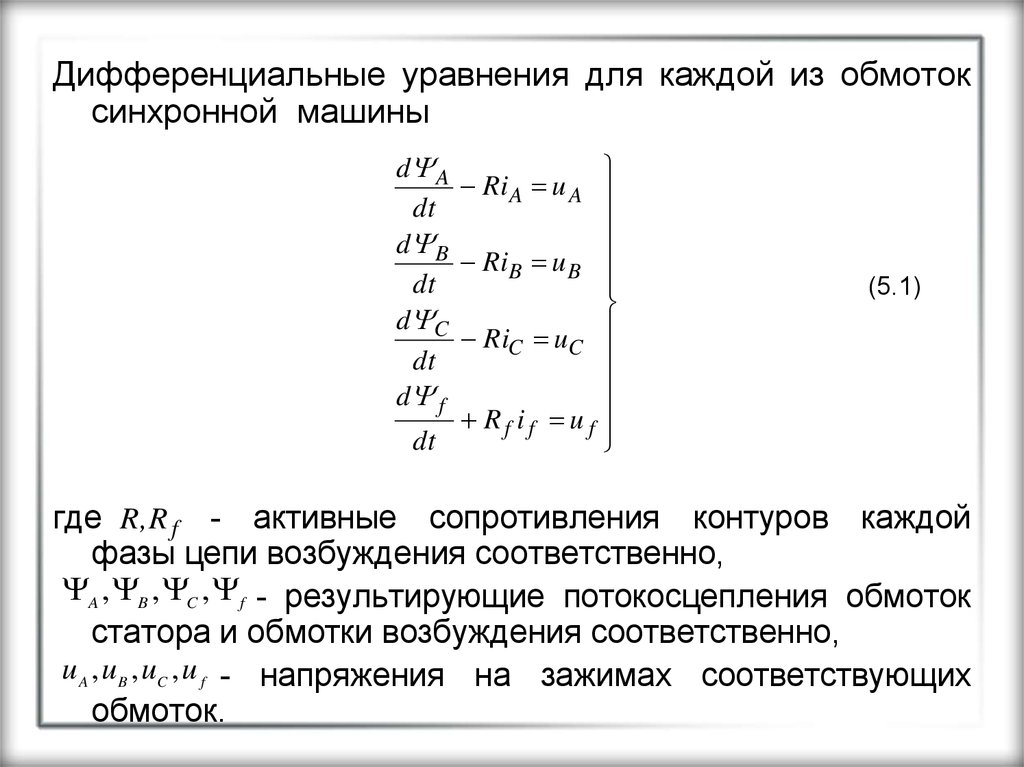
Дифференциальные уравнения для каждой из обмотоксинхронной машины
d A
RiA u A
dt
d B
RiB u B
dt
d C
RiC uC
dt
d f
Rf if u f
dt
(5.1)
где R , R f - активные сопротивления контуров каждой
фазы цепи возбуждения соответственно,
A , B , C , f - результирующие потокосцепления обмоток
статора и обмотки возбуждения соответственно,
u A , u B , uC , u f - напряжения на зажимах соответствующих
обмоток.
6.
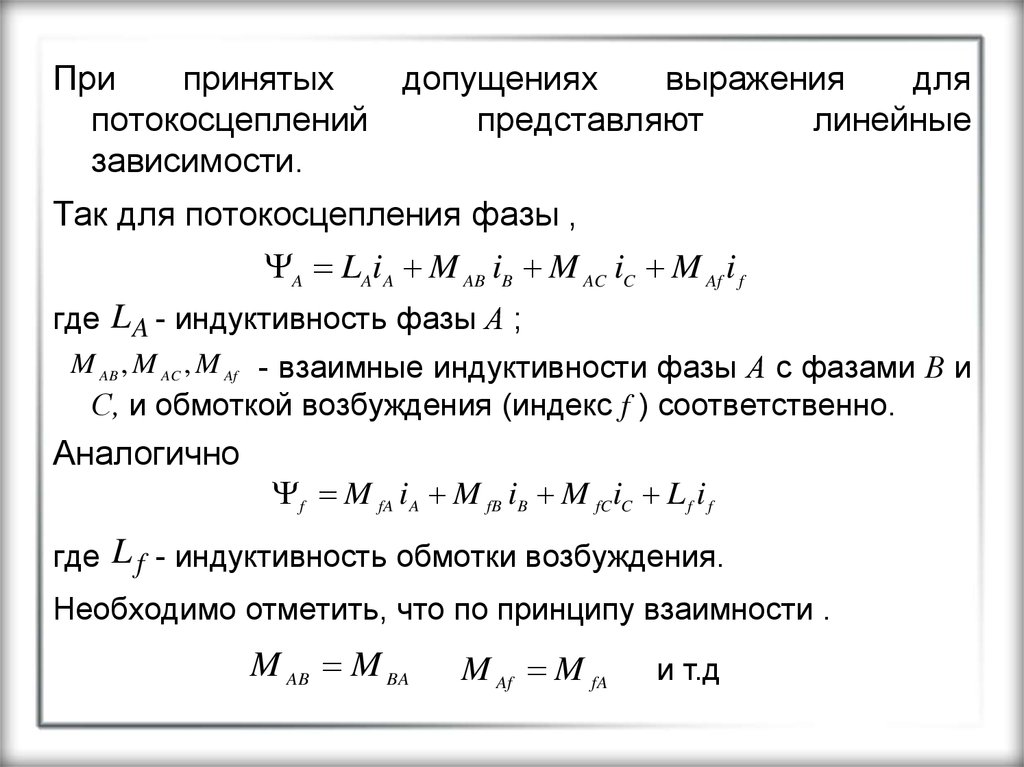
Припринятых
допущениях
выражения
для
потокосцеплений
представляют
линейные
зависимости.
Так для потокосцепления фазы ,
A LAiA M AB iB M AC iC M Af i f
где L A - индуктивность фазы А ;
M AB , M AC , M Af - взаимные индуктивности фазы А с фазами В и
С, и обмоткой возбуждения (индекс f ) соответственно.
Аналогично
f M fA iA M fB iB M fCiC L f i f
где L f - индуктивность обмотки возбуждения.
Необходимо отметить, что по принципу взаимности .
M AB M BA
M Af M fA
и т.д
7.
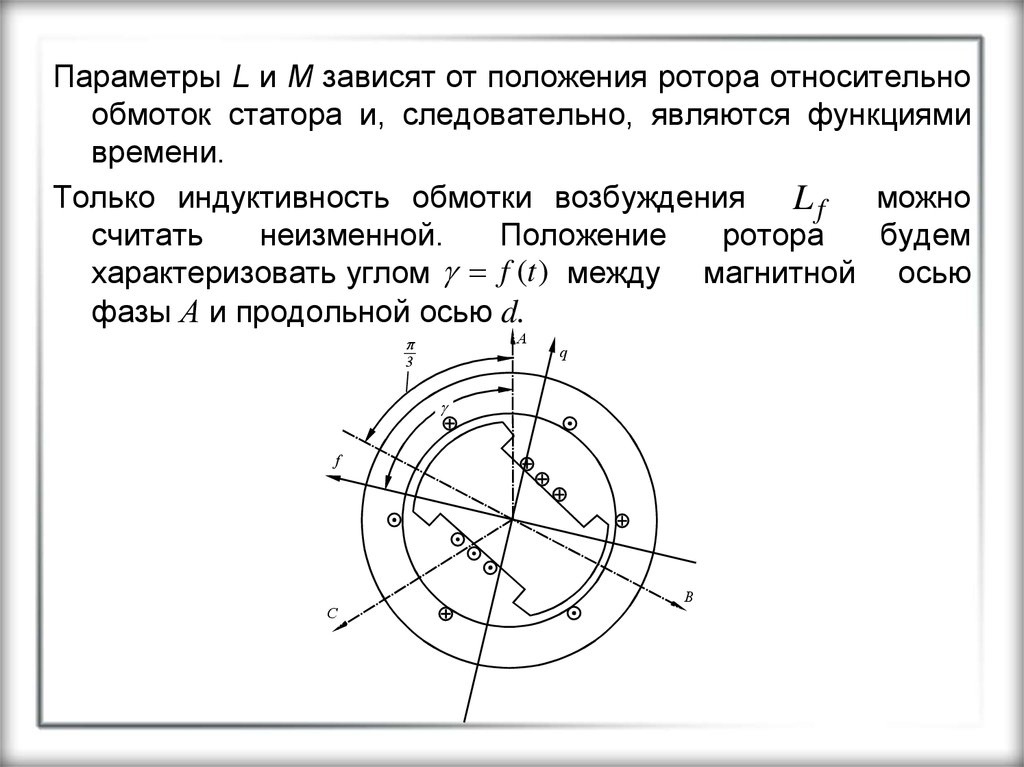
Параметры L и M зависят от положения ротора относительнообмоток статора и, следовательно, являются функциями
времени.
Только индуктивность обмотки возбуждения
L f можно
считать
неизменной.
Положение
ротора
будем
характеризовать углом f (t ) между магнитной осью
фазы А и продольной осью d.
A
3
q
f
C
B
8.
Синусоидальность наводимых в статоре ЭДС указываетна гармонический закон изменения взаимных
индуктивностей между обмоткой возбуждения и
каждой из фазных обмоток.
Так, например, для фазы А,
M Af M fA M d cos
где M d - максимальное значение взаимоиндукции при
совпадении магнитных осей обмоток статора и
ротора.
Изменение индуктивностей фазных обмоток и взаимных
индуктивностей между ними обусловлены вращением
явнополюсного ротора, поскольку при этом меняется
сопротивление
магнитным
потокам,
которые
определяют данные величины.
9.
Изменение магнитных потоков происходит гармоническис периодом T1 T 2 , так как при повороте ротора на
180о повторяется предыдущий цикл изменения
магнитного сопротивления.
Так, например, индуктивность фазы А определяется
выражением,
LA l0 l2 cos 2
взаимная индуктивность между обмотками фаз А и В,
M AB m0 m2 cos 2 / 3
где l 0 , m 0 - постоянные составляющие соответствующих
индуктивностей;
l2 , m2 - амплитуды вторых гармоник соответствующих
индуктивностей.
10. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
Аналогично могут быть записаны выражения для L и Mостальных обмоток.
Таким образом, коэффициенты в уравнениях системы
(5.1) являются переменными, что значительно
усложняет её решение.
(Дифференциальные
уравнения
с
переменными
коэффициентами называются параметрическими;
аналитическое решение имеют только немногие из
них).
11. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
5.2. Обобщённый вектор трёхфазнойсистемы и замена переменных синхронной
машины
12.
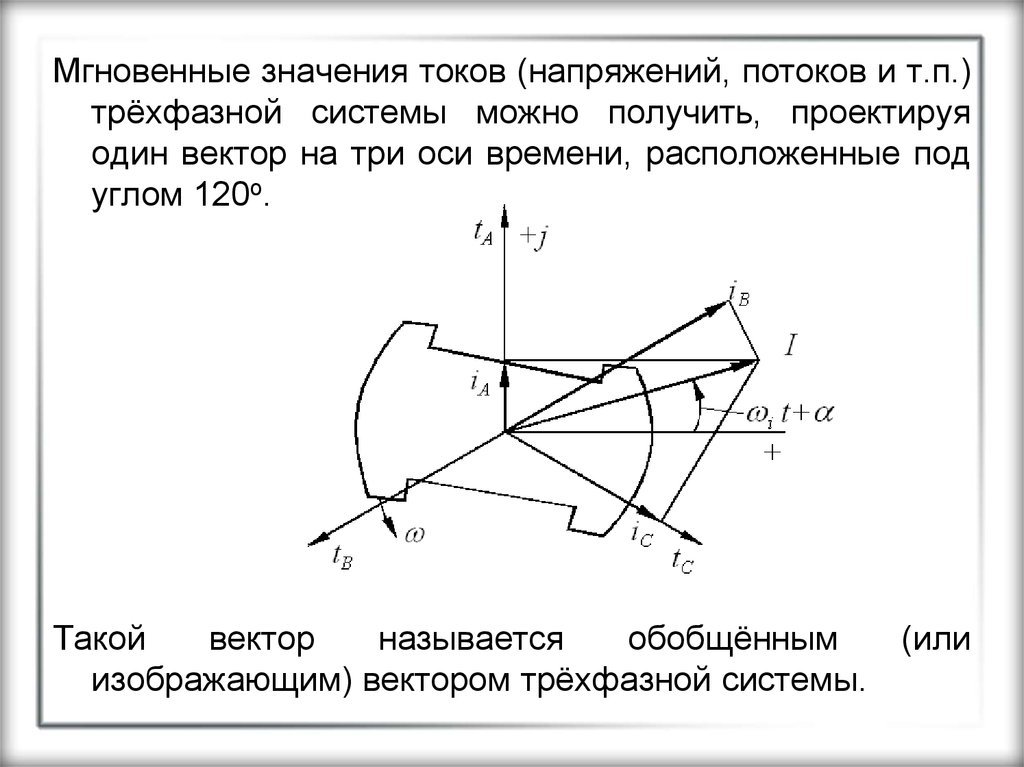
Мгновенные значения токов (напряжений, потоков и т.п.)трёхфазной системы можно получить, проектируя
один вектор на три оси времени, расположенные под
углом 120о.
Такой
вектор
называется
обобщённым
(или
изображающим) вектором трёхфазной системы.
13.
Замена фазных переменных величин обобщённымвектором позволяет разложить его на продольную (d) и
поперечную (q) составляющие.
Оси d,q,0 образуют декартову
вращающуюся вместе с ротором.
систему
координат,
Переход от неподвижной фазной системы координат A, B,
C к вращающейся, жестко связанной с ротором системы
d,q,0 был впервые предложен Блонделем для
установившегося режима.
Такой подход был распространён Парком Р.Х. на
переходный режим. Это позволяет параметрическую
систему
уравнений
(5.1)
свести
к
системе
дифференциальных
уравнений
с
постоянными
коэффициентами, что упрощает её решение.
14.
Величина обобщённого вектораможет
определена исходя из следующих равенств
i A I sin i t ,
iB I sin i t / 3 ,
iC I sin i t / 3 ,
быть
(5.2)
где i
- угловая скорость обобщённого вектора I,
которая в переходном режиме может отличаться от
угловой скорости вращения ротора ,
, - начальный угол обобщённого вектора
относительно оси, перпендикулярной оси обмотки A.
15.
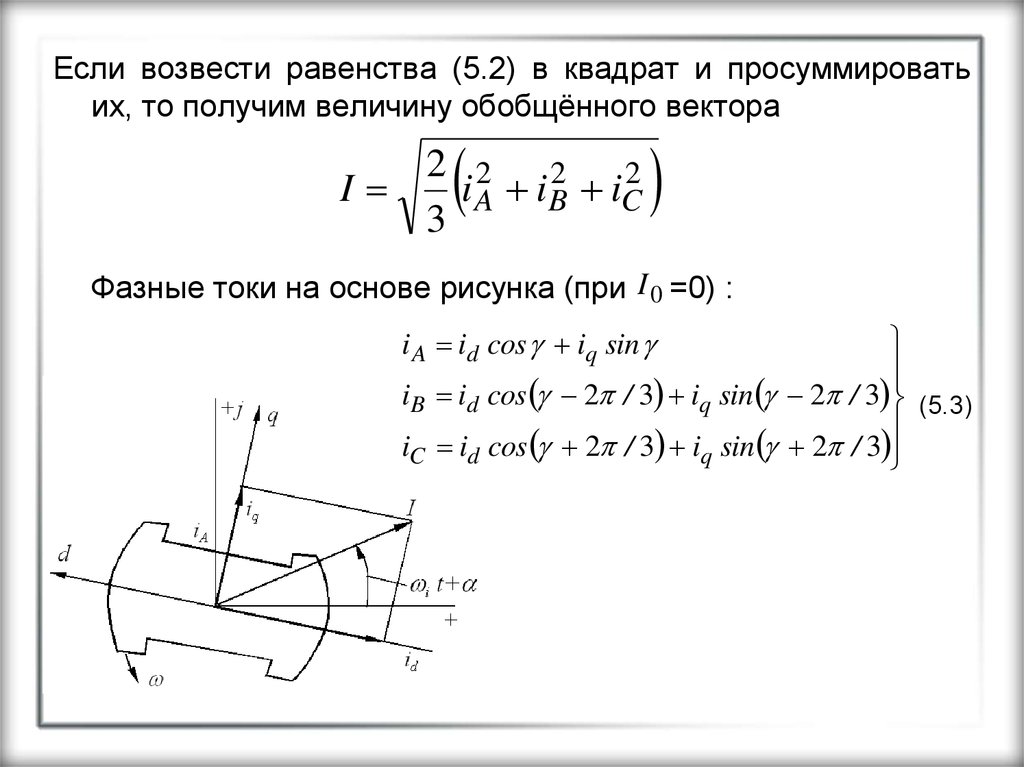
Если возвести равенства (5.2) в квадрат и просуммироватьих, то получим величину обобщённого вектора
2 2 2 2
I
i A iB iC
3
Фазные токи на основе рисунка (при I 0 =0) :
iB id cos 2 / 3 iq sin 2 / 3 (5.3)
iC id cos 2 / 3 iq sin 2 / 3
i A id cos iq sin
16. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
5.3. Уравнения Парка для синхронноймашины
17.
В уравнение для фазы обмотки статора (из (5.1))d A
RiA u A
dt
подставим выражения для фазных величин ( , i , u ),
выраженные
через
обобщённые
векторы
в
продольной и поперечной осях ротора (из 5.3))
i A id cos iq sin
u A ud cos uq sin
A d cos q sin
С
помощью этой подстановки заменим фазные
переменные
обобщёнными.
После
дифференцирования и преобразования получим
d q
d d
d
d
q
Rid cos u q
d
Riq sin 0 (5.4)
ud
dt
dt
dt
dt
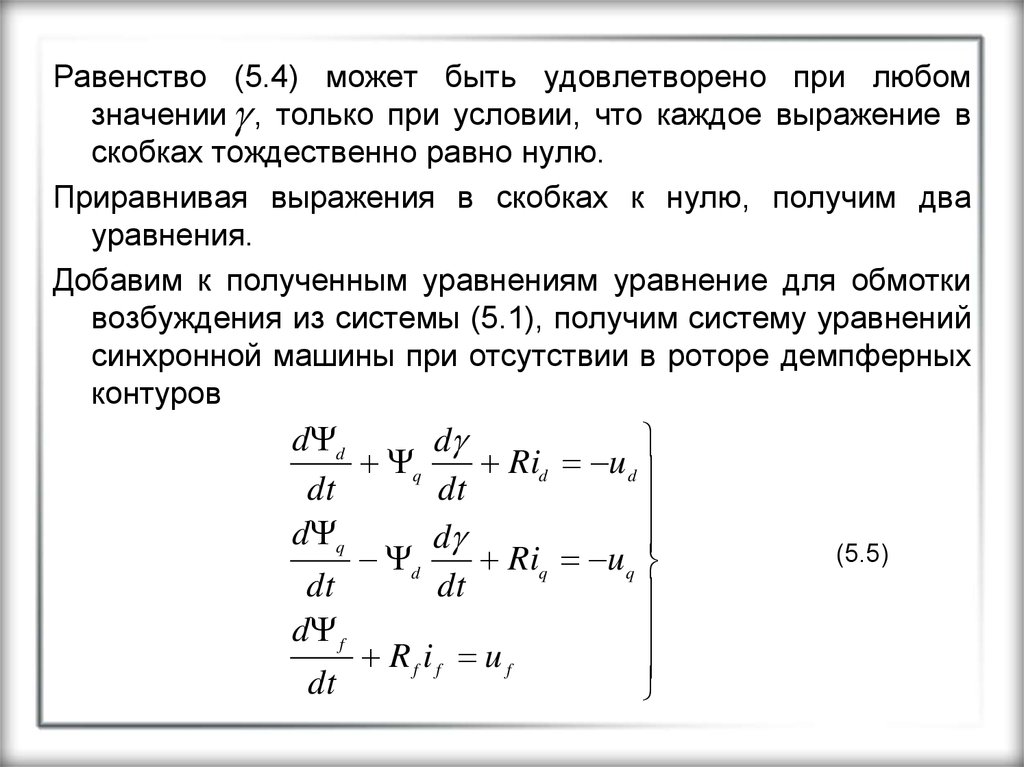
18.
Равенство (5.4) может быть удовлетворено при любомзначении , только при условии, что каждое выражение в
скобках тождественно равно нулю.
Приравнивая выражения в скобках к нулю, получим два
уравнения.
Добавим к полученным уравнениям уравнение для обмотки
возбуждения из системы (5.1), получим систему уравнений
синхронной машины при отсутствии в роторе демпферных
контуров
d d
d
q
Rid u d
dt
dt
d q
d
d
Riq u q
dt
dt
d f
Rf if u f
dt
(5.5)
19.
Полученные уравнения называются уравнениями Парка.Они выражают теорию двух реакций обмоток статора
синхронной машины и характеризуют переходный
процесс в ней.
Входящие в систему дифференциальные уравнения
имеют постоянные коэффициенты.
d d , d q представляют
ЭДС
dt
трансформации,
такdtкак наводятся в обмотках статора
Слагаемые
и ротора благодаря изменению потокосцеплений.
Трансформаторные ЭДС наводятся в переходном
режиме, в стационарном режиме они отсутствуют.
20.
d, представляют собой ЭДС
dt
Слагаемые, содержащие
вращения (резания), которые наводятся в обмотках
статора благодаря вращающемуся полю.
В обмотках ротора в стационарном режиме эти ЭДС
отсутствуют, так как не создают в них изменяющегося
потока. В переходном режиме происходит перемещение
обобщённого вектора потока относительно ротора и в его
обмотках наводятся ЭДС скольжения.
d и q включают потоки рассеяния
Потокосцепления
обмоток статора.
Полные синхронные индуктивности Ld Lad L , Lq Laq L
При принятом положительном направлении потока из ротора
в статор результирующее потокосцепление можно
выразить через обобщённые векторы токов ротора и
статора
d Lad i f Ld id
,
q Lq iq
21. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
5.4. Трёхфазное короткое замыканиесинхронной машины
22. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
5.4.1. Переходный процесс в синхронноймашине без демпферных обмоток при
отключённом регуляторе возбуждения
23. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
При указанных выше допущениях и учитывая, что вместе КЗ ud u q 0
из
первого
и
второго
уравнений
системы
(5.5)
путём
несложных
преобразований можно получить
I
Eq
xd2 R 2
(5.6)
где Eq Riq xd id - синхронная ЭДС в установившемся
режиме.
Выражение (5.6) может быть использовано для расчёта
переходного режима при заданных значениях Eq и x d
24.
Изменение во времени действующего значенияпериодической слагающей тока получим из третьего
уравнения системы (5.5)
d f
dt
Rf if u f
Разделим это уравнение на R f , и учитывая, что ,
f L f i f получим
L f di f
R f dt
где i fe
uf
Rf
if
uf
Rf
- вынужденный ток возбуждения.
(5.7)
25.
Постоянная времени обмоткиразомкнутой обмотке статора
Lf 0
Tf 0
Rf
возбуждения
при
при замкнутой обмотке статора постоянная времени
свободного переходного тока статора
x d
Td T f 0
xd
С учётом последнего выражения перепишем уравнение
(5.7) в виде
Td
di f
dt
i f i fe
(5.8)
26. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
Так как относительных единицах ток возбуждения равенЭДС i f * Eq* , то (5.8) представим в виде
Td
dEq
dt
Eq Eqe
(5.9)
где Eqe вынужденная
ЭДС,
создаваемая
возбудителем, равная при отключённом регуляторе
возбуждения ЭДС предшествующего режима.
27. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
Решение дифференциального уравнения (5.9)Eq Eq 0 Eqe exp( t / Td ) Eqe
(5.10)
где Eq 0 - начальная полная ЭДС в первый момент КЗ с
учётом возрастания за счёт свободных токов ответной
реакции ротора.
28.
В соответствие с (5.6) разделим все члены уравнения(5.10) на ( xd xв н )
,
пренебрегая
активными
сопротивлениями; получим действующее значение
тока в любой момент времени
I t I dt I 0 I exp t / Td I I св .0 exp t / Td I
(5.11)
где I св .0 I 0 I - начальный свободный переходный ток.
29. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
Начальный переходныйформулы
I 0
ток
КЗ
определяется
из
Eq
x d xв н
Установившейся ток, соответствующий принуждённой
ЭДС .
I
Eqе
xd xв н
30. Кривая действующего значения тока, соответствующая (5.11)
ItI0'
' 0
Iсв
I
0
1
2
3
4
t
5 c
Кривая действующего значения тока КЗ при замыкании на
выводах статора синхронной машины без демпферных обмоток
31. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
5.4.2. Влияние демпферных обмоток на токкороткого замыкания.
32.
Упрощённо можно считать, что демпферная обмоткаприводит
к
возникновению
дополнительного
свободного сверхпереходного тока
I I exp( t / Td )
I св I dсс
где Td - постоянная времени демпферной обмотки при
замкнутой обмотке статора,
I 0 Eq x d xвн - начальный сверхпереходный ток.
Ток КЗ в любой момент времени
I t I св .0 exp t / Td I св .0 exp t / Td I
(5.12)
33.
Выражение (5.12) с двумя постоянными времени сдопустимой для практики погрешностью (10-15%)
позволяет определить периодический ток.
В действительности процесс протекает сложнее.
Демпферные обмотки и тело ротора имеют много
контуров, свободные токи вначале протекают по
поверхности, постепенно проникая во внутрь.
Магнитная связь между продольной демпферной
обмоткой и обмоткой возбуждения исключает
независимое изменение тока в любой из них.
34. Кривая тока в соответствии с выражением (5.12)
ItI0''
I0'
' 0
Iсв
I
0
1
2
3
4
t
5 c
Кривая действующего значения тока КЗ при замыкании на выводах
статора синхронной машины с демпферными обмотками
35. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
5.4.3. Влияние автоматического регуляторавозбуждения на процессы в синхронной
машине.
36.
Автоматическим регулятором возбуждения (АРВ)называется
устройство
релейной
форсировки
возбуждения, которое приходит в действие при
определённом снижении напряжения генератора
(например, при КЗ).
Релейная
форсировка
является
простой,
но
эффективной мерой повышения устойчивости работы
генераторов, а также потребителей электроэнергии.
Релейная форсировка характеризуется предельным
(потолочным)
током
возбуждения,
скоростью
нарастания напряжения и вынужденного тока
возбуждения.
Существенной особенностью данного режима работы
является нелинейность характеристики возбудителя
и машины (вследствие насыщения зубцов ротора и
других элементов на пути магнитного потока).
37.
Для упрощения решения задачи расчёта тока КЗхарактеристики
машины
примем
линейными,
соответствующими некоторому среднему насыщению. При
этом можно считать, что действие АРВ заключается в
увеличении тока КЗ.
Выражение для тока КЗ можно представить в виде
I t I t без АРВ I np F (t )
(5.13)
где I np - предельное приращение установившегося тока КЗ за
счет АРВ,
F ( t ) – функция, определяющая закон приращения во
времени синхронной ЭДС вследствие форсировки
возбуждения машины (зависит от постоянных времени
сверхпереходного тока и обмотки возбуждения);
I t без АРВ - периодическая слагающая тока КЗ при отключённом
АРВ (вычисляется по формулам (5.11) или (5.12) в
зависимости от наличия демпферных обмоток).
38. Кривая тока КЗ при наличии АРВ
ItI0'
' 0
Iсв
I
0
0,5
1
t
c
Кривая действующего значения тока КЗ при замыкании на выводах
статора синхронной машины с АРВ
39.
Выражение (5.13) предполагает увеличение токавозбуждения
до
предельного
значения,
что
соответствует близким КЗ.
При удалённых КЗ напряжение генератора через 1-5 с
может достигнуть номинального U í , после чего АРВ
поддерживает ток возбуждения на достигнутом
уровне.
При этом ток КЗ в генераторе, также неизменный
Uн
It
xв н
При включённом АРВ затухание свободных оков,
возникших при КЗ, компенсируется увеличением токов
от действия АРВ.
40. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
5.4.4. Расчёт периодической составляющейтока короткого замыкания методом
типовых кривых
41. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
Наиболее важным и характерным являетсяначальное значение периодической слагающей
тока КЗ.
Однако, в ряде случаев требуется учитывать
изменение периодической слагающей тока КЗ:
для
проверки
термической
устойчивости
аппаратов, отключаемого тока, анализа действия
релейной защиты.
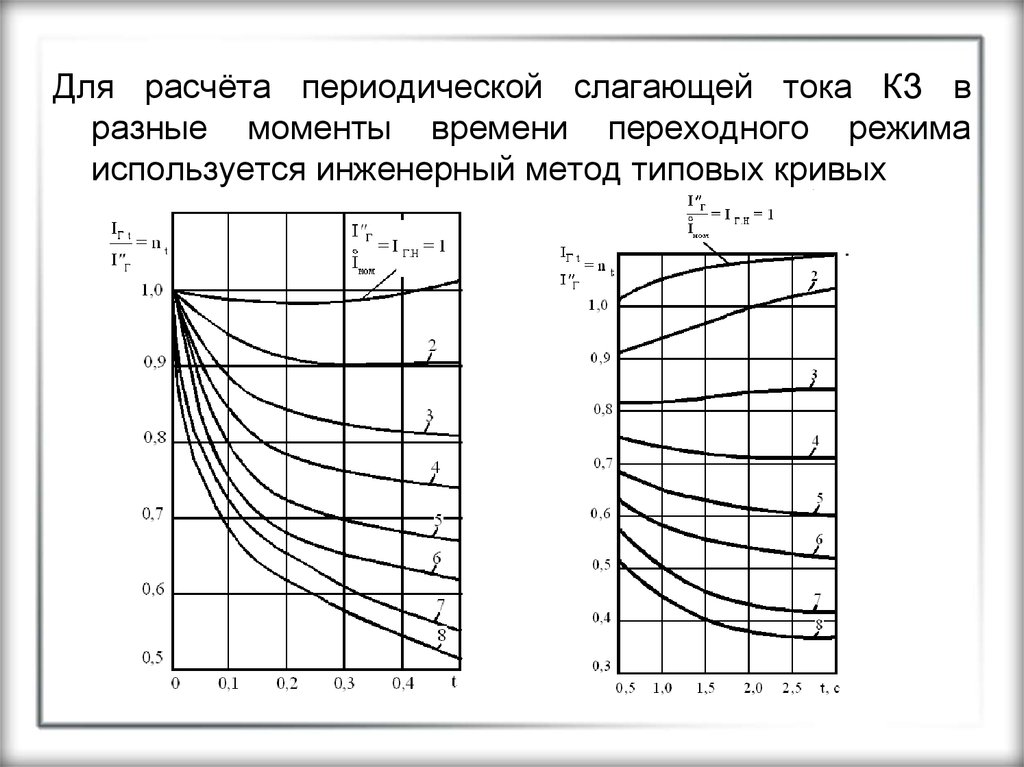
42.
Для расчёта периодической слагающей тока КЗ вразные моменты времени переходного режима
используется инженерный метод типовых кривых
43.
Известно, что параметры турбо- и гидрогенераторовразличны, поэтому характер изменения тока во времени
различен даже при одинаковой удалённости КЗ.
Типовые
кривые
получены
путём
решения
дифференциальных уравнений синхронной машины и
представляют собой средние кривые изменения тока во
времени в относительных единицах (для турбо- и
гидрогенераторов).
Максимальная погрешность усреднения не превышает
10%, что является приемлемым для практических
расчётов.
Использование типовых кривых рекомендуется для
турбогенераторов мощностью 12,5 - 800 МВт,
гидрогенераторов до 500 МВт и всех крупных
синхронных компенсаторов.
44.
Типовые кривые представляют собой относительныезначения токов (отнесены к сверхпереходным токам
генератора) для различных моментов времени t.
Для учёта удалённости КЗ введено отношение начального
тока КЗ генератора
I кг к его номинальному току I ном ,
т.е. I н.г* I кг I ном , характеризующие кратность тока КЗ к
номинальному току.
Таким образом, типовые кривые представляют собой
семейство кривых f (t ) I гt I г при различных значениях
I кг I ном const , которые характеризуют изменение во
времени относительного тока.
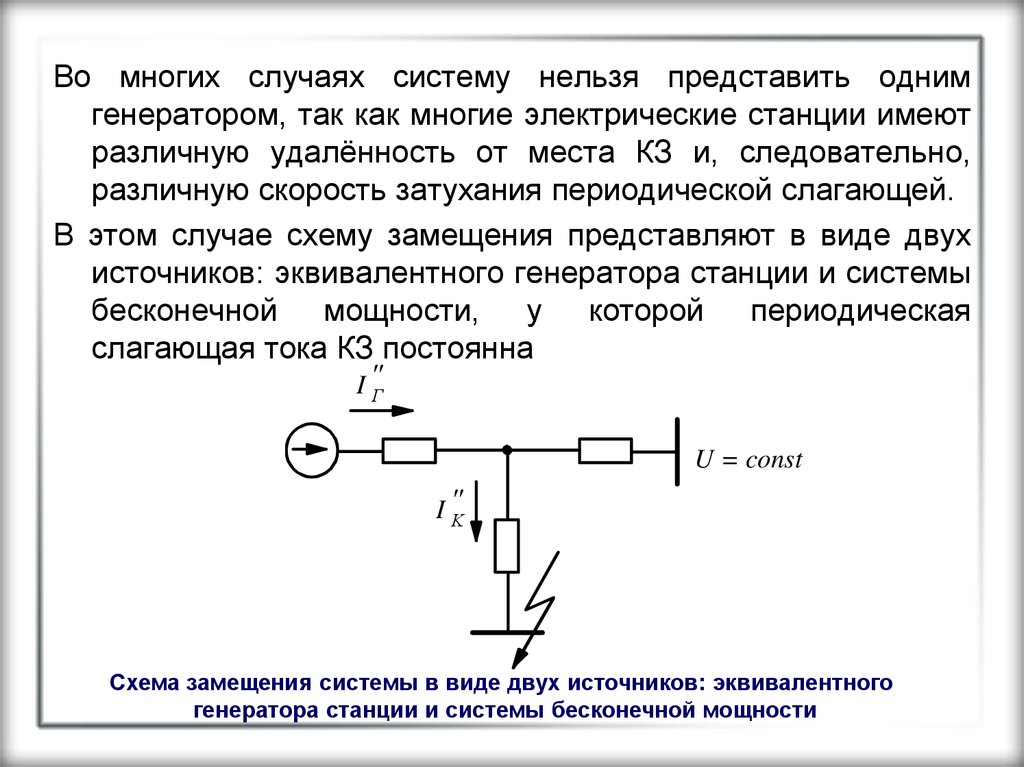
45.
Во многих случаях систему нельзя представить однимгенератором, так как многие электрические станции имеют
различную удалённость от места КЗ и, следовательно,
различную скорость затухания периодической слагающей.
В этом случае схему замещения представляют в виде двух
источников: эквивалентного генератора станции и системы
бесконечной мощности, у которой периодическая
слагающая тока КЗ постоянна
I ''Г
U = const
I ''K
Схема замещения системы в виде двух источников: эквивалентного
генератора станции и системы бесконечной мощности
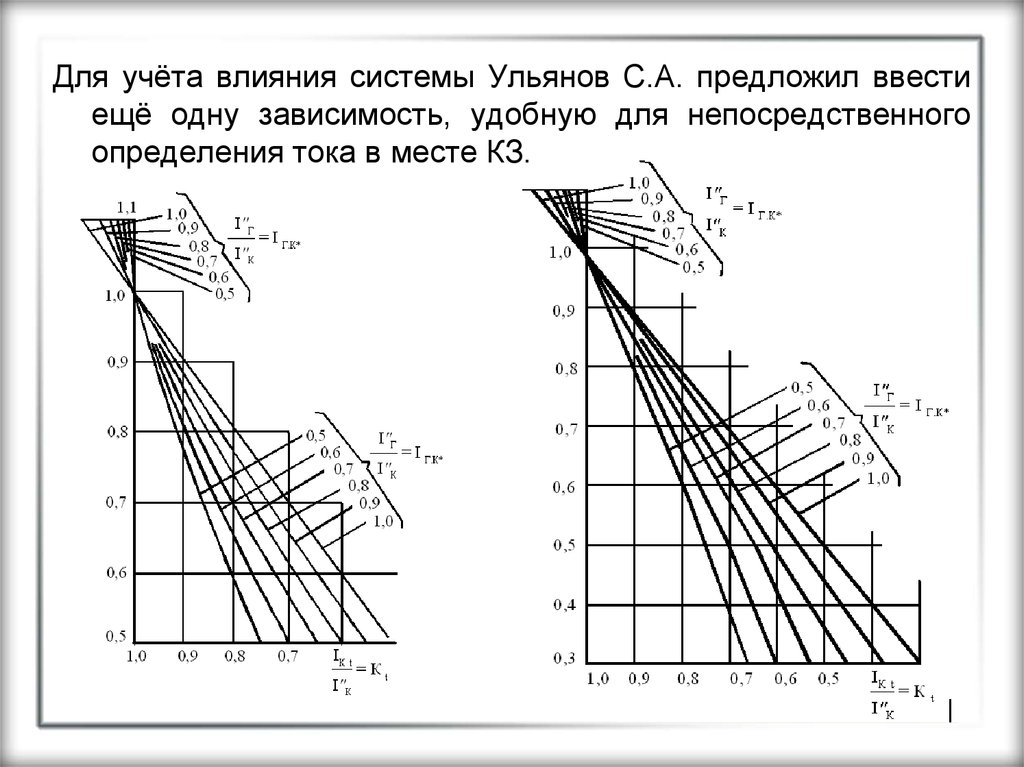
46.
Для учёта влияния системы Ульянов С.А. предложил ввестиещё одну зависимость, удобную для непосредственного
определения тока в месте КЗ.
47.
Расчёт токов КЗ с помощью типовых кривых приотсутствии
системы
бесконечной
мощности
производится в следующей последовательности.
1. Составляется схема замещения для начального
сверхпереходного режима. Все генераторы и нагрузки
вводятся сверхпереходными ЭДС.
2. Схема замещения преобразуется (упрощается)
относительно
точки
КЗ
и
определяются
эквивалентные ЭДС Е э и сопротивление õ ý .
3. С помощью найденных значений ЭДС и
сопротивления определяется начальный ток КЗ от
обобщённого генератора I ã (при расчёте без учёта
нагрузок он равен току в месте КЗ).
48.
4. Определяется номинальный ток генераторов, приведенныйк ступени КЗ
I ном
Pэ.ном
3U ном cos н
где Рэ.ном - номинальная мощность всех генераторов
станции, U ном - напряжение генератора, приведенное к
ступени КЗ (среднее номинальное напряжение ступени
КЗ), cos í - коэффициент мощности.
5. По найденным в п.п. 3 и 4 значениям и определяется
кратность начального тока КЗ генератора
I г .н* I к I ном
Для
заданных
моментов
времени
определяются
действующие значения периодической составляющей тока
КЗ, используя найденные по кривым значения nt
I гt I г nt
49. Пример 5.1.
Для схемы, произвести расчёт изменения во временипериодической составляющей тока КЗ в месте
трёхфазного
повреждения,
используя
типовые
кривые.
S
Л
АТ
K
G
ЭC
Схема участка сети к примеру 5.1.
(З)
50. ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕХОДНЫЙ ПРОЦЕСС В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
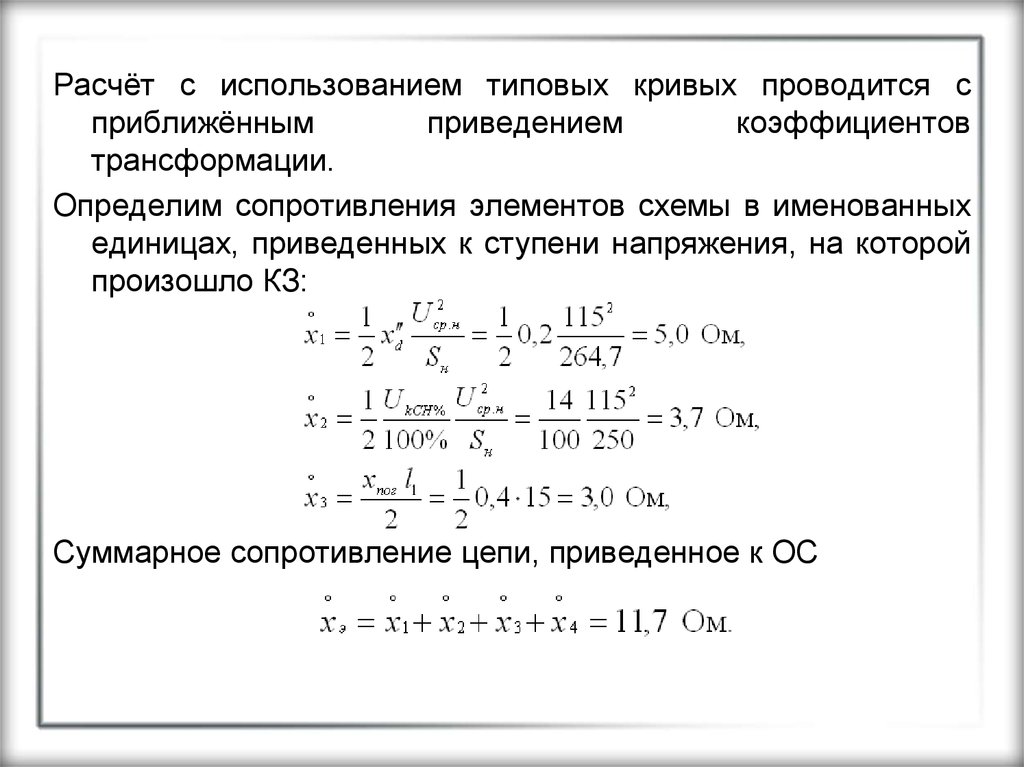
Схема замещения участка сети к примеру 5.151.
Расчёт с использованием типовых кривых проводится сприближённым
приведением
коэффициентов
трансформации.
Определим сопротивления элементов схемы в именованных
единицах, приведенных к ступени напряжения, на которой
произошло КЗ:
Суммарное сопротивление цепи, приведенное к ОС
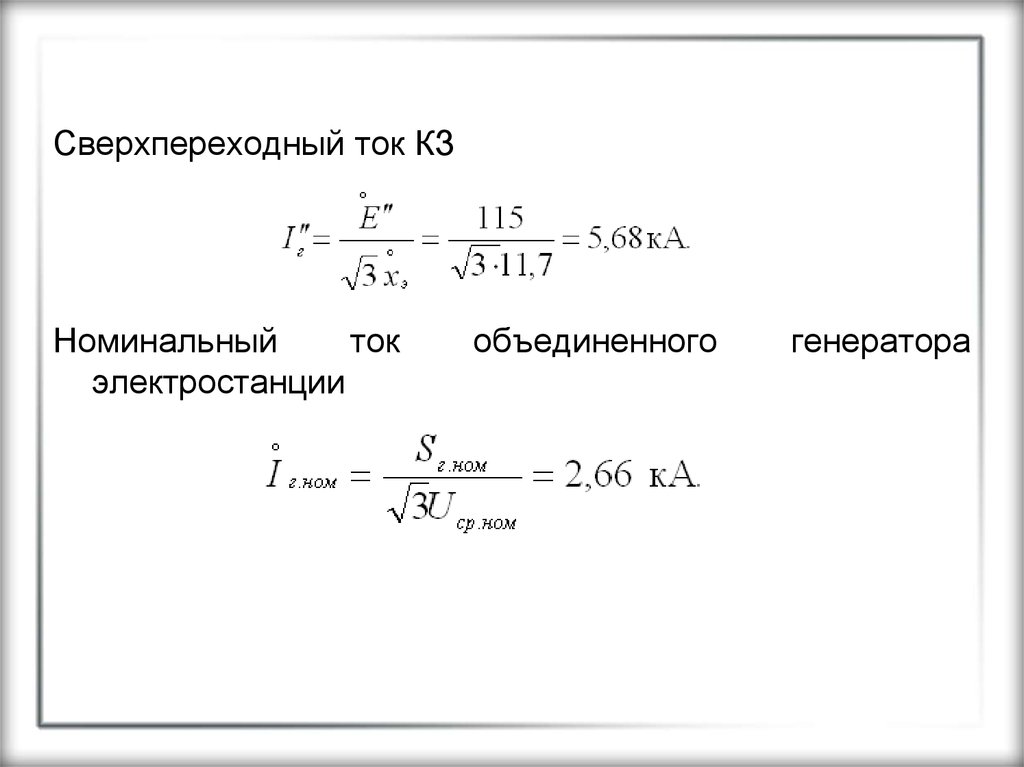
52.
Сверхпереходный ток КЗНоминальный
ток
электростанции
объединенного
генератора
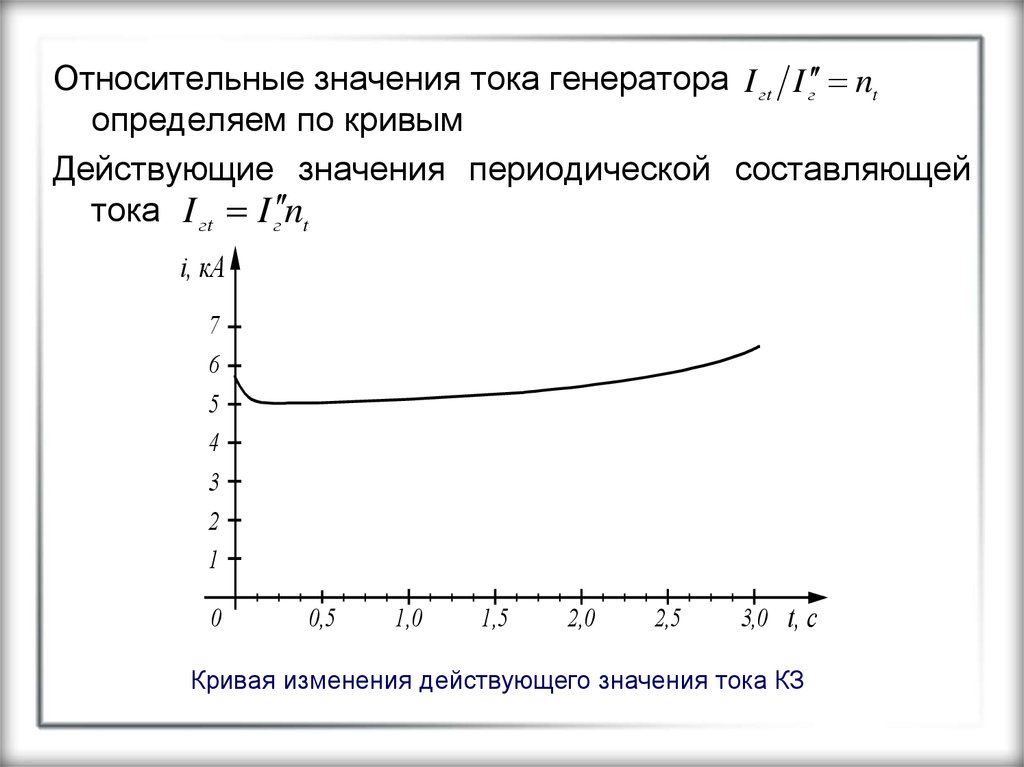
53.
Относительные значения тока генератора I гt I г ntопределяем по кривым
Действующие значения периодической составляющей
тока I гt I г nt
i, кА
7
6
5
4
3
2
1
0
0,5
1,0
1,5
2,0
2,5
3,0 t, с
Кривая изменения действующего значения тока КЗ
54.
5.5. Переходные процессы в электрическихдвигателях
55.
Синхронные двигатель и компенсатор являютсядополнительными источниками тока КЗ, так как их
сверхпереходная (или переходная) ЭДС больше
подведенного напряжения ( U c ),
которое
при
возникновении КЗ в любой точке сети уменьшается.
Схема замещения синхронного двигателя такая же, как
и синхронного генератора.
Параметры схемы замещения синхронного двигателя
находятся, используя параметры предшествующего
режима.
При отсутствии справочных данных для синхронного
двигателя можно приближенно принять E* СД 1,1 и x* СД 0,2
56.
Для определения ударного тока от синхронногодвигателя, необходимо предварительно определить
постоянную времени, для нахождения которой
находится его активное сопротивление
RСД * 0,25 1 н н cos
где н - КПД двигателя.
Недовозбужденный
синхронный
двигатель
также
работает в режиме генератора при значительных
снижениях напряжения, возникающих при КЗ (при
малой удалённости КЗ).
При малых снижениях напряжения, когда сохраняется
неравенство E U c ,
он
по-прежнему
будет
потреблять ток из сети.
57.
Асинхронные двигатели, составляющие основную частьпромышленной нагрузки, работают с малым скольжением
s =2-5%.
Для практических расчетов можно считать, что они работают
с синхронным числом оборотов.
Следовательно, в начальный момент КЗ асинхронный
двигатель можно рассматривать как недовозбужденный
синхронный.
Существенный ток КЗ генерируют только асинхронные
двигатели, непосредственно связанные с точкой КЗ или
находящиеся в зоне малой удалённости от неё, т.е. те, у
которых сверхпереходные ЭДС превышают напряжения
сети в точке присоединения двигателей.
Этот ток обусловлен электромагнитной энергией, запасённой
в обмотках АД до возникновения КЗ.
58. Переходные процессы в электрических двигателях
Ротор асинхронного двигателя в начальный момент КЗпродолжает по инерции вращаться.
В
цепи ротора протекает остаточный ток, а
соответствующий ему поток пронизывает обмотку
статора, и, вследствие его изменения в ней наводится
ЭДС.
Так как цепь обмотки статора замкнута, протекает ток к
точке КЗ.
После затухания свободного тока ротора (вследствие
активного сопротивления цепи ротора) генерирование
тока асинхронным двигателем прекращается.
59.
Исходя из неизменности потокосцепления с обмоткойротора в начальный момент КЗ, для асинхронного
двигателя можно установить его сверхпереходные
ЭДС и сопротивление.
Схема замещения асинхронного двигателя для
определения
сверхпереходных
параметров
аналогична
схеме
замещения
синхронного
генератора.
Сверхпереходное
сопротивление
асинхронного
двигателя по существу является сопротивлением КЗ,
относительную величину которого можно определить
из выражения x* AД 1 / k пуск
Сверхпереходная ЭДС определяется из условий
предшествующего
режима.
При
отсутствии
справочных данных она приближенно может быть
принята равной E* AД 0,9
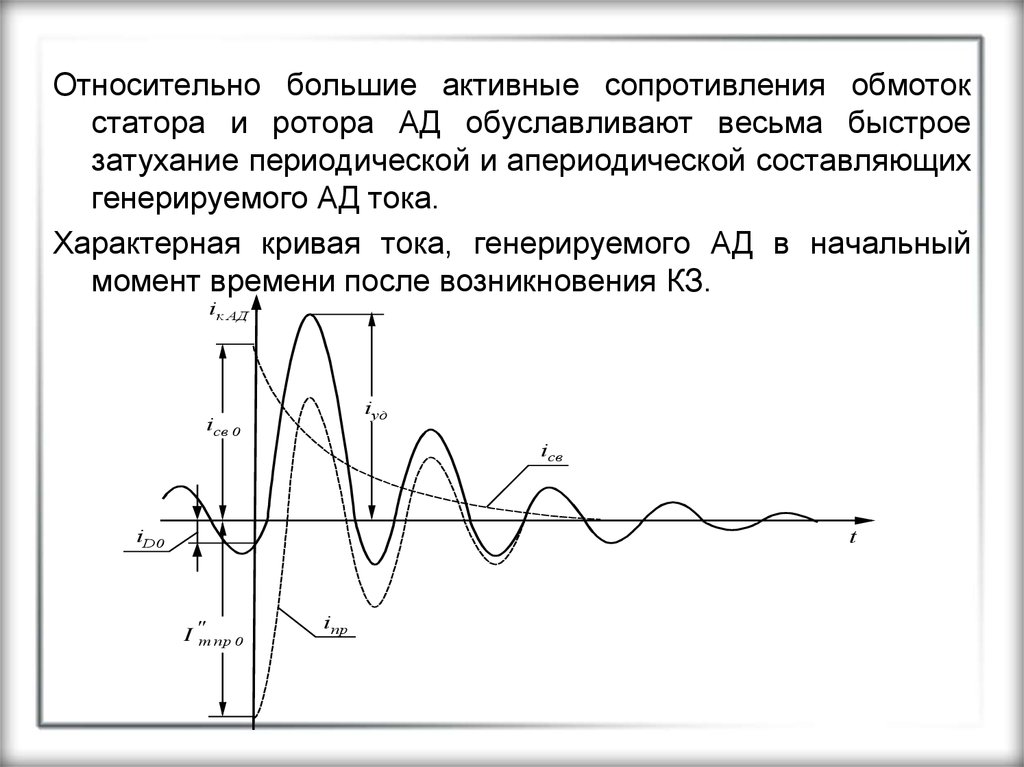
60.
Относительно большие активные сопротивления обмотокстатора и ротора АД обуславливают весьма быстрое
затухание периодической и апериодической составляющих
генерируемого АД тока.
Характерная кривая тока, генерируемого АД в начальный
момент времени после возникновения КЗ.
iк АД
iуд
iсв 0
iсв
iD0
t
I ''m пр 0
iпр
61. Переходные процессы в электрических двигателях
Дополнительный ударный ток от АДi уд. АД
E АД
x АД
где k уд. АД ударный
двигателя.
2k уд. АД
коэффициент
асинхронного
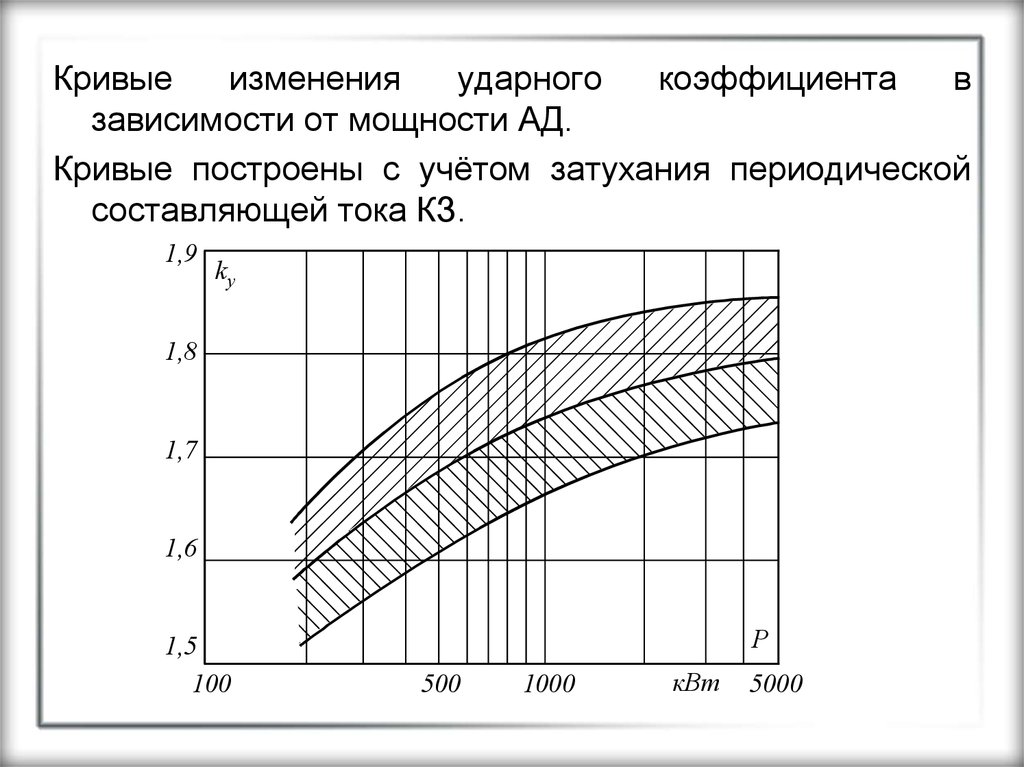
62.
Кривыеизменения
ударного
коэффициента
в
зависимости от мощности АД.
Кривые построены с учётом затухания периодической
составляющей тока КЗ.
1,9
kу
1,8
1,7
1,6
1,5
100
Р
500
1000
кВт
5000
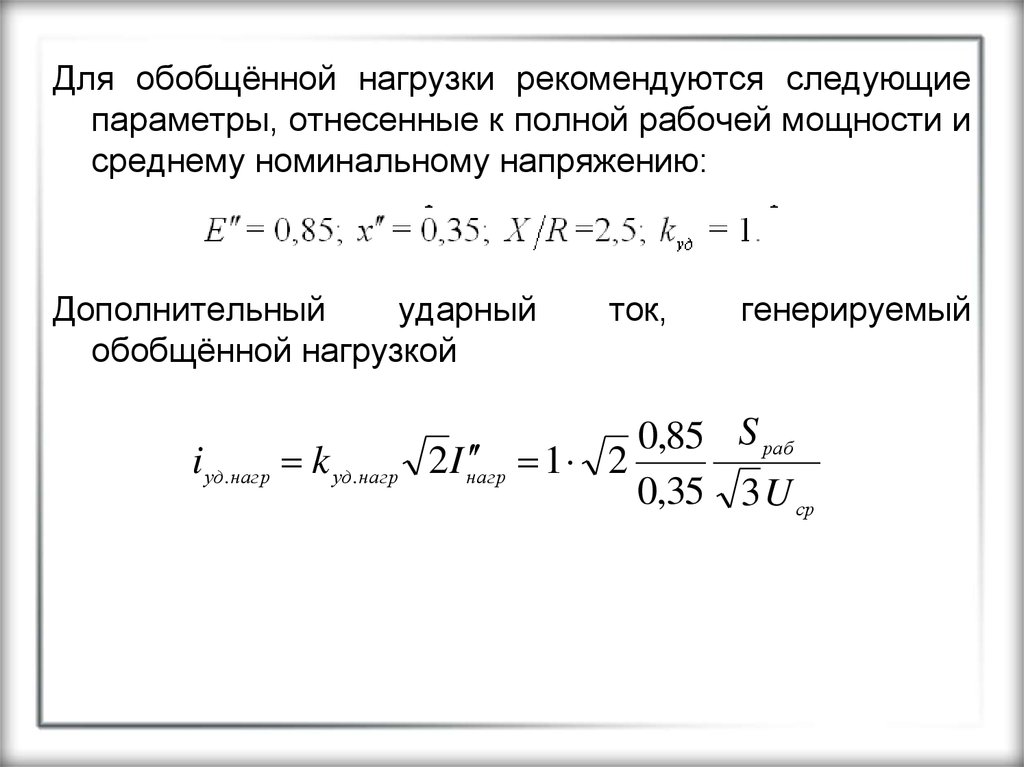
63.
Для обобщённой нагрузки рекомендуются следующиепараметры, отнесенные к полной рабочей мощности и
среднему номинальному напряжению:
Дополнительный
ударный
обобщённой нагрузкой
i уд.нагр k уд.нагр
ток,
генерируемый
0,85 S раб
1 2
2 I нагр
0,35 3 U ср