































 programming
programmingSimilar presentations:










Изучение принципов работы датчика расстояния. Его применение в программировании робота
1.
1-4 классыКурс молодого инженера 2.0
Презентация занятия
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.
ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
21 занятие
2021
2.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
ТЕМА: ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.
ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
1. ПРИВЕТСТВЕННОЕ СЛОВО ПРЕПОДАВАТЕЛЯ
2. ПОВТОРЕНИЕ МАТЕРИАЛА ПРОШЛОГО УРОКА
Рис.1
inginirium.ru
5
3.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
2. ПОВТОРЕНИЕ МАТЕРИАЛА ПРОШЛОГО УРОКА
Рис.2
Какой датчик мы изучали
на прошлом уроке? В чём
разница работы его
режимов?
inginirium.ru
6
4.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
7
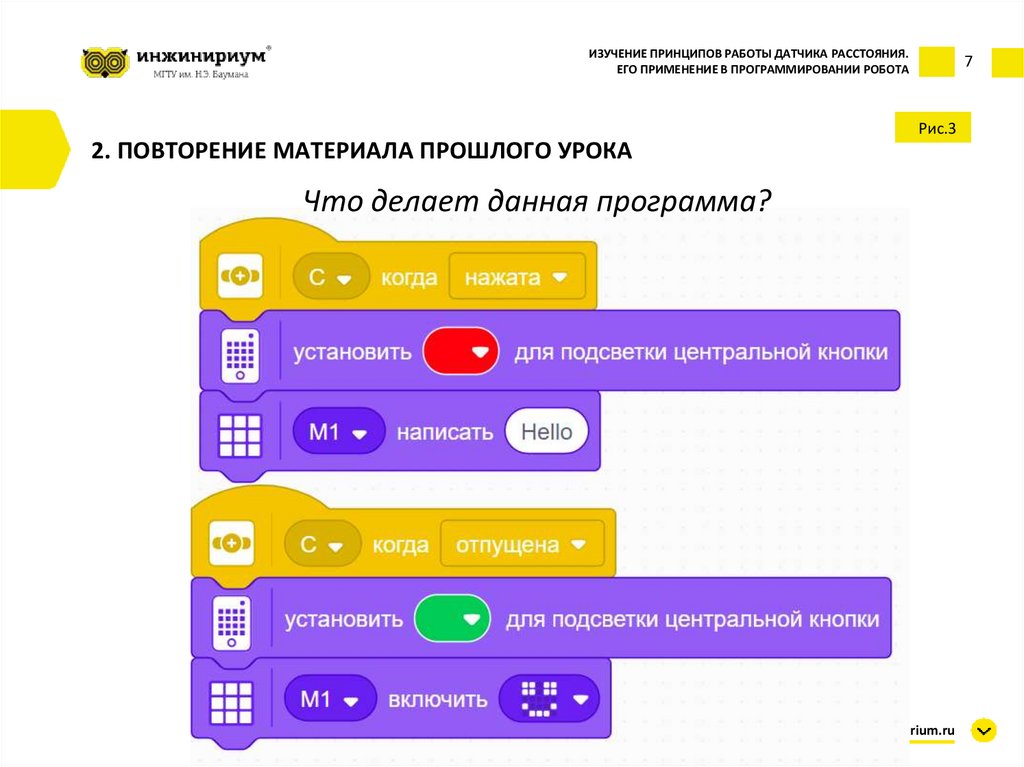
Рис.3
2. ПОВТОРЕНИЕ МАТЕРИАЛА ПРОШЛОГО УРОКА
Что делает данная программа?
inginirium.ru
5.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
2. ПОВТОРЕНИЕ МАТЕРИАЛА ПРОШЛОГО УРОКА
Дайте определение термину “звук” и заполните пропуски в схеме.
Рис.4
Звук – …
?
?
?
inginirium.ru
8
6.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
31
Рис.27
4. КАК РАБОТАЮТ ДАТЧИКИ КАСАНИЯ И РАССТОЯНИЯ
Датчик касания (силы) —
это датчик, который может
определять, когда красная
кнопка датчика нажата, а
когда отпущена.
Датчики положения
(расстояния) – устройства, с
помощью которых определяют
расстояние до определённого
неконтролируемого объекта.
inginirium.ru
7.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
44
Рис.40
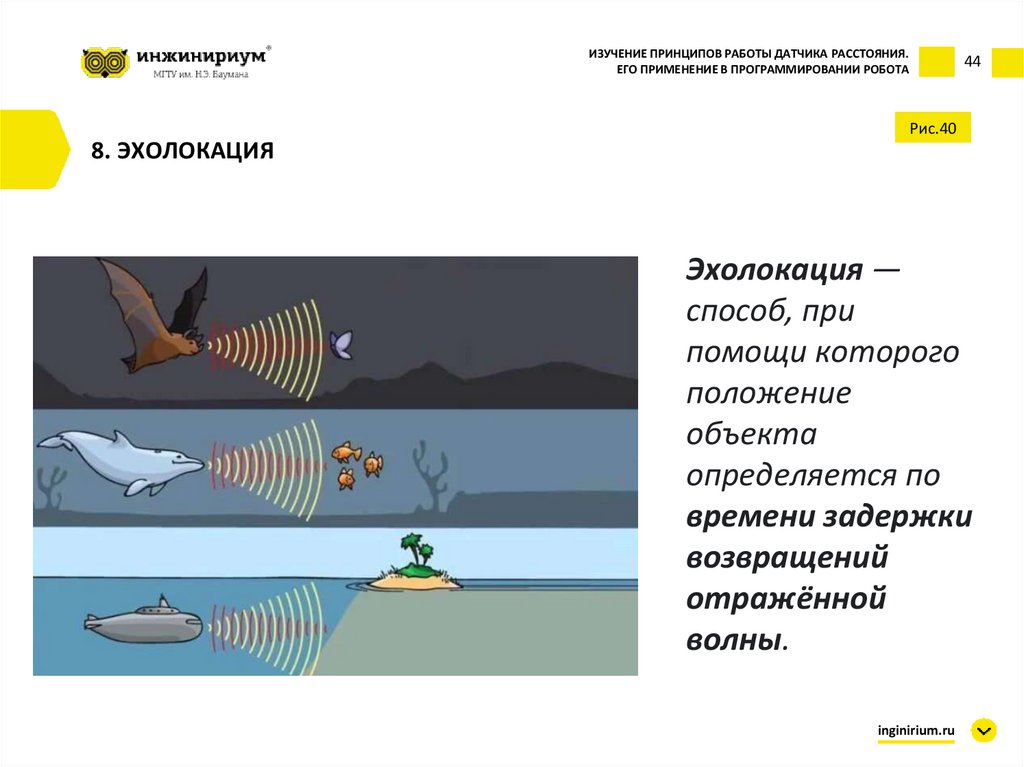
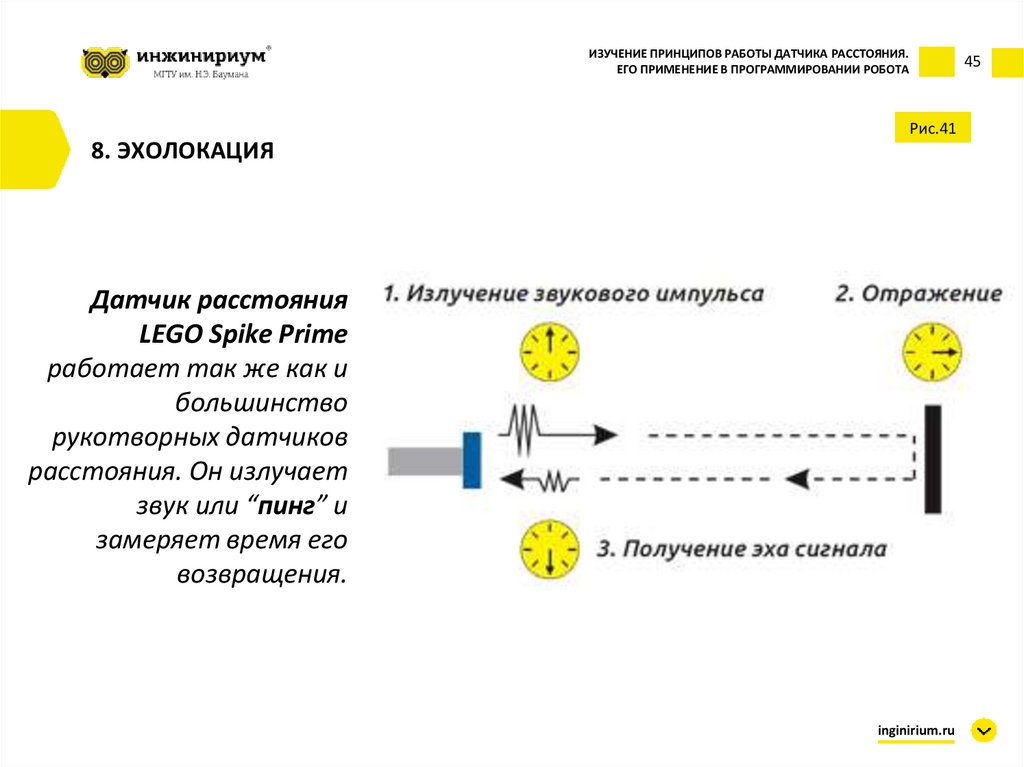
8. ЭХОЛОКАЦИЯ
Эхолокация —
способ, при
помощи которого
положение
объекта
определяется по
времени задержки
возвращений
отражённой
волны.
inginirium.ru
8.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
45
Рис.41
8. ЭХОЛОКАЦИЯ
Датчик расстояния
LEGO Spike Prime
работает так же как и
большинство
рукотворных датчиков
расстояния. Он излучает
звук или “пинг” и
замеряет время его
возвращения.
inginirium.ru
9.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
Рис.5
inginirium.ru
9
10.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
ШАГ 1
Рис.6
inginirium.ru
10
11.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
ШАГ 2
Рис.7
inginirium.ru
11
12.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
Рис.8
ШАГ 3
inginirium.ru
12
13.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
Рис.9
ШАГ 4
inginirium.ru
13
14.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
ШАГ 5
Рис.10
ШАГ 7
ШАГ 6
inginirium.ru
14
15.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
ШАГ 8
Рис.11
inginirium.ru
15
16.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
ШАГ 9
Рис.12
inginirium.ru
16
17.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
ШАГ 10
Рис.13
inginirium.ru
17
18.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
ШАГ 11
Рис.14
inginirium.ru
18
19.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
ШАГ 12
Рис.15
ШАГ 13
inginirium.ru
19
20.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
Рис.16
ШАГ 14
inginirium.ru
20
21.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
ШАГ 15
Рис.17
ШАГ 16
inginirium.ru
21
22.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
ШАГ 17
Рис.18
ШАГ 18
inginirium.ru
22
23.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
ШАГ 19
Рис.19
ШАГ 20
inginirium.ru
23
24.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
24
3. КОНСТРУИРОВАНИЕ
ШАГ 21
Рис.20
ШАГ 22
inginirium.ru
25.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
Рис.21
ШАГ 23
ШАГ 25
ШАГ 24
inginirium.ru
25
26.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
26
3. КОНСТРУИРОВАНИЕ
Рис.22
ШАГ 27
ШАГ 26
inginirium.ru
27.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
Рис.23
ШАГ 29
ШАГ 28
inginirium.ru
27
28.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
Рис.24
ШАГ 29
inginirium.ru
28
29.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
3. КОНСТРУИРОВАНИЕ
ШАГ 30
Рис.25
ШАГ 31
inginirium.ru
29
30.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
30
3. КОНСТРУИРОВАНИЕ
Рис.26
ШАГ 32
ШАГ 34
ШАГ 33
inginirium.ru
31.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
5. ПРОГРАММИРОВАНИЕ РОБОТА
Блоки управления датчиком расстояния
Рис.28
inginirium.ru
32
32.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
33
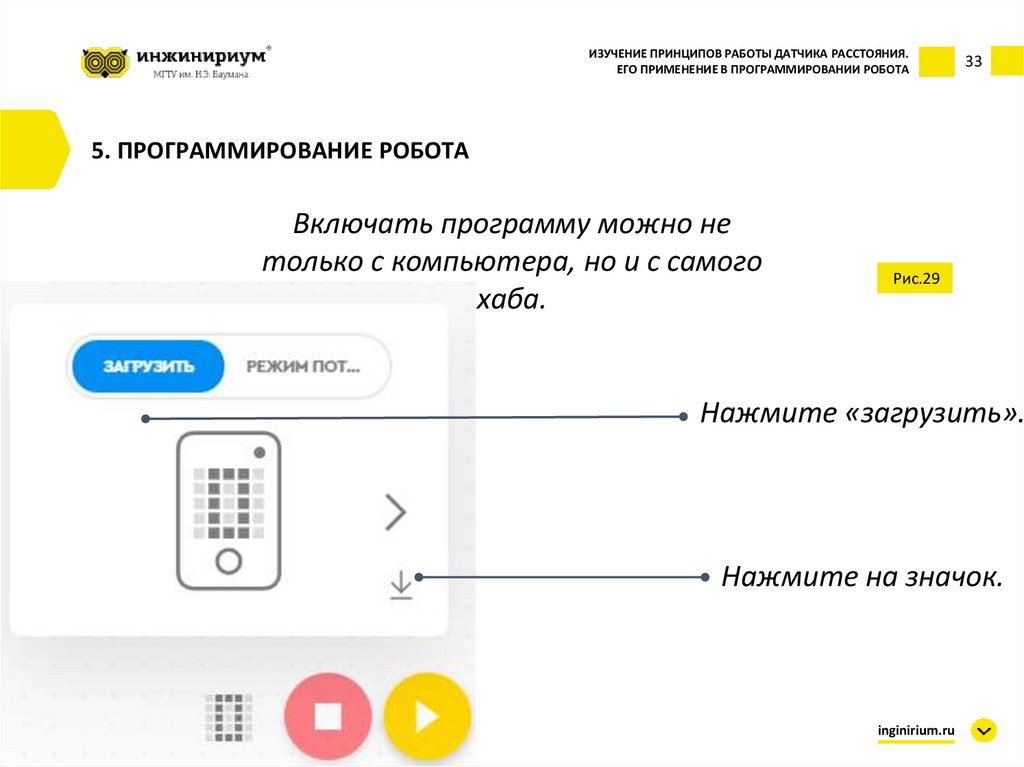
5. ПРОГРАММИРОВАНИЕ РОБОТА
Включать программу можно не
только с компьютера, но и с самого
хаба.
Рис.29
Нажмите «загрузить».
Нажмите на значок.
inginirium.ru
33.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
34
Рис.30
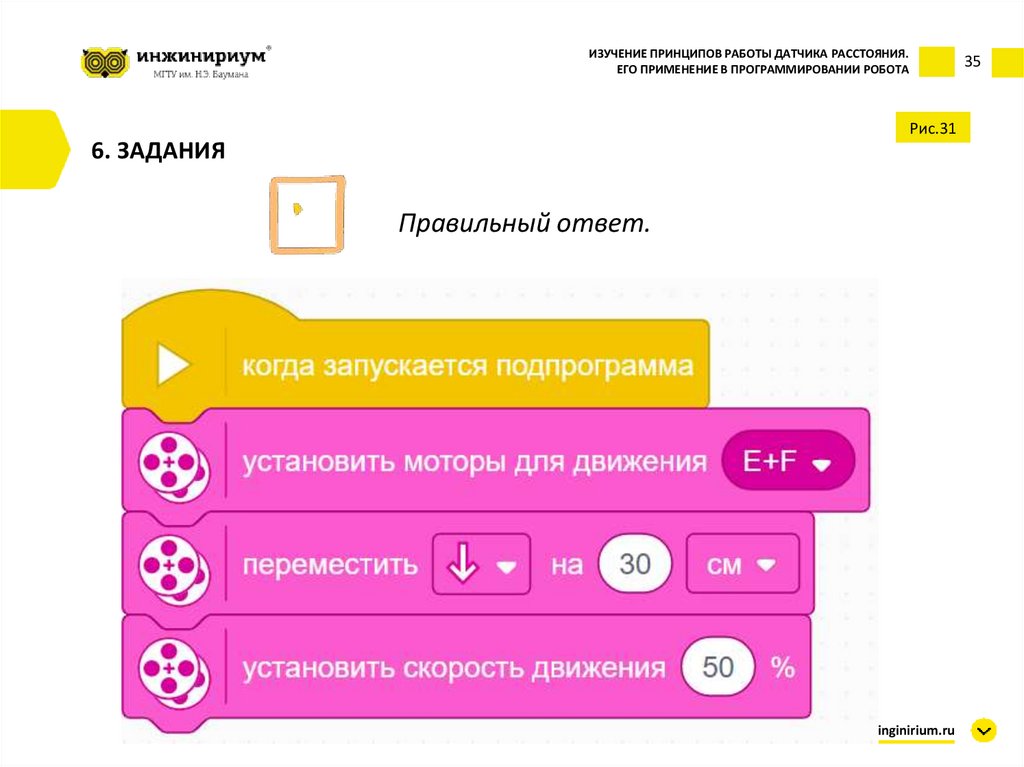
6. ЗАДАНИЯ
1. Зпрограммируйте робота так, чтобы он поехал назад на
30 см со скоростью 50%.
inginirium.ru
34.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
35
Рис.31
6. ЗАДАНИЯ
Правильный ответ.
inginirium.ru
35.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
36
Рис.32
6. ЗАДАНИЯ
2. Сделайте так, чтобы робот двигался прямо вдоль стены,
пока она не исчезнет, иначе он должен повернуть направо.
Используйте блоки управления датчиком расстояния
inginirium.ru
36.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
38
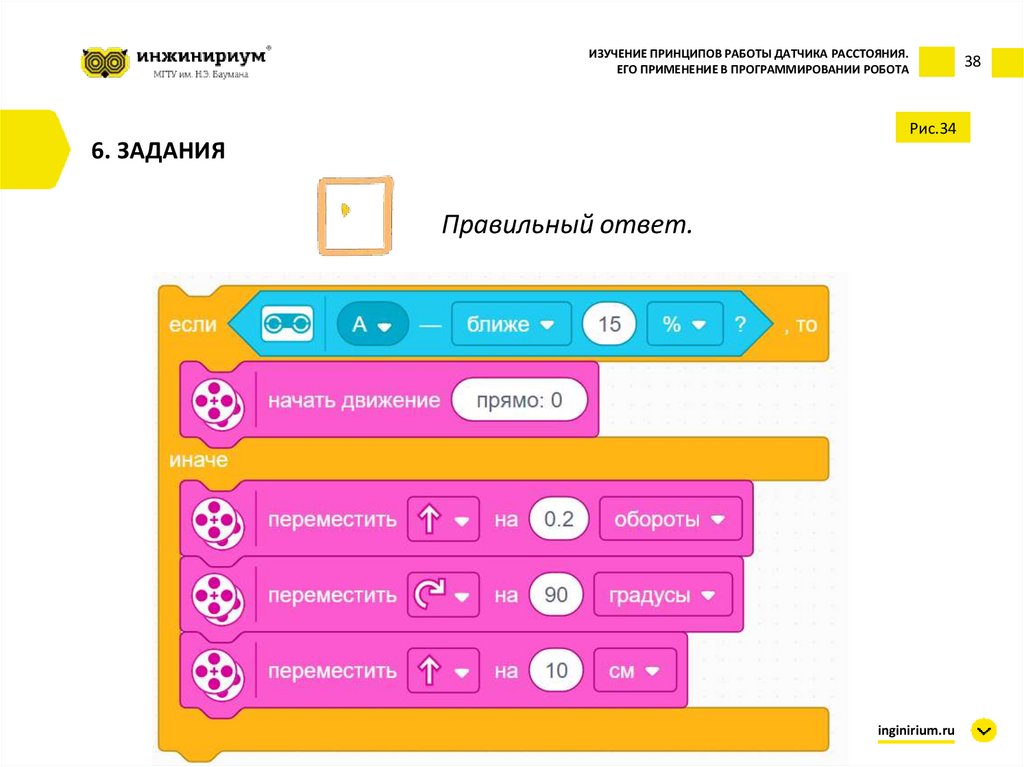
Рис.34
6. ЗАДАНИЯ
Правильный ответ.
inginirium.ru
37.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
37
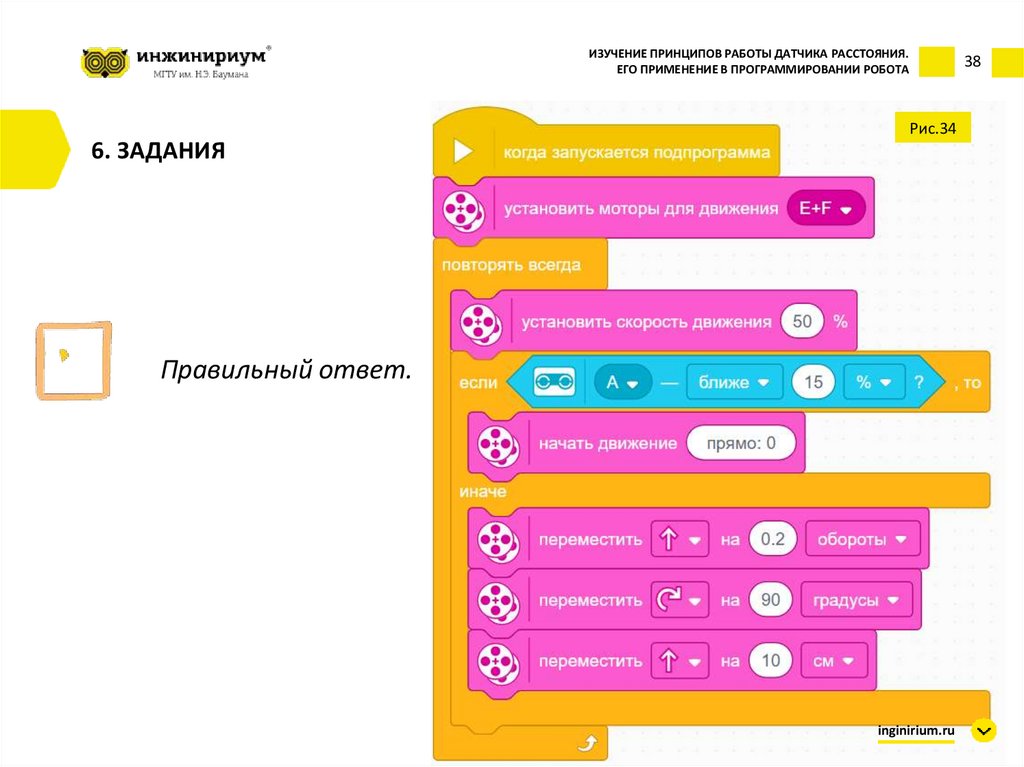
Рис.33
6. ЗАДАНИЯ
Зациклите данное действие.
inginirium.ru
38.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
38
Рис.34
6. ЗАДАНИЯ
Правильный ответ.
inginirium.ru
39.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
39
Рис.35
6. ЗАДАНИЯ
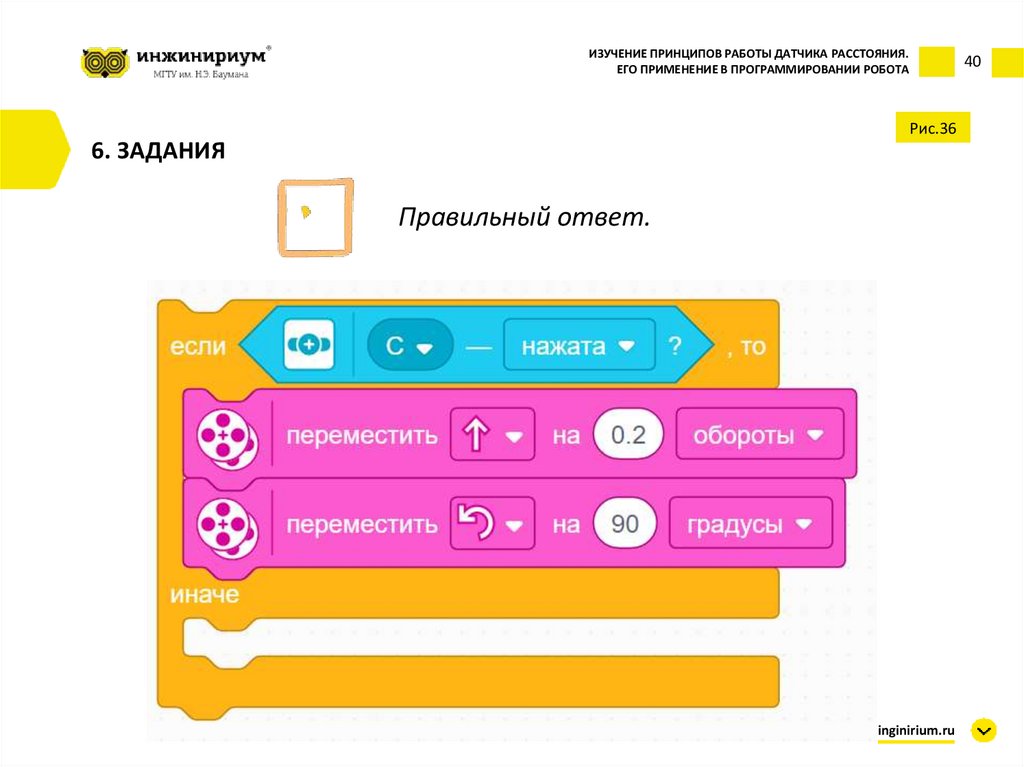
3. Сделайте так, чтобы, когда робот упирался в стенку,
он поворачивал на 90 градусов
inginirium.ru
40.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
40
Рис.36
6. ЗАДАНИЯ
Правильный ответ.
inginirium.ru
41.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
41
Рис.37
6. ЗАДАНИЯ
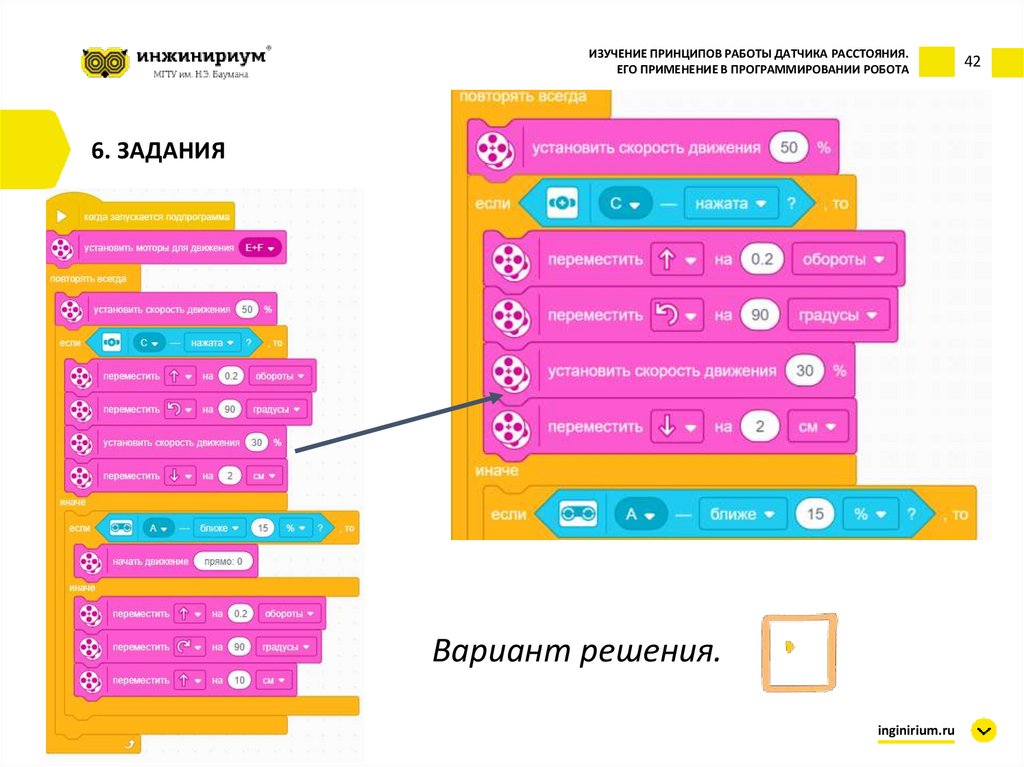
4. Откалибруйте свою программу
inginirium.ru
42.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
42
Рис.38
6. ЗАДАНИЯ
Вариант решения.
inginirium.ru
43.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
43
Рис.39
7. ТЕСТИРОВАНИЕ
Создайте лабиринт из подручных материалов и
по очереди протестируйте ваших роботов
inginirium.ru
44.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ ДАТЧИКА РАССТОЯНИЯ.ЕГО ПРИМЕНЕНИЕ В ПРОГРАММИРОВАНИИ РОБОТА
9. РЕФЛЕКСИЯ
Насколько Вы
поняли тему?
?
inginirium.ru
46