


















































































 mechanics
mechanics electronics
electronicsSimilar presentations:










Механические характеристики производственных механизмов и электрических двигателей. Лекция 2
1.
Механические характеристики рабочих механизмов (РМ)n
4. Х= -1
Момент нелинейно падающий
Например:
• металлорежущие станки
Mc
Механические характеристики электродвигателей
n
1
2
3
M вр
1 – абсолютно жесткая характеристика;
2 – жесткая характеристика;
3 – мягкая характеристика
2.
Механические характеристики производственных механизмови электрических двигателей
При рассмотрении механических характеристик ЭП и механизмов
используется стандартная координатная сетка с четырьмя квадрантами.
Иногда пользуются только одним квадрантом, если рассматривают
один отдельный режим работы электрической машины.
II
> 0 генератор
или
M < 0 торможение
I
> 0 двигательный режим
выбранного направления
M > 0 движения
–М
+М
< 0 двигательный режим
обратного направления
M < 0 движения
III
< 0 генератор
или
M > 0 торможение
IV
3.
Для устойчивого функционирования привода надохорошо знать характеристики как производственного
механизма, так и двигателя. А точнее речь идет о их
совместимости.
Все производственные механизмы можно по типу
характеристик разделить на четыре основные группы и
описать их общим выражением:
х
М с М 0 М с.н М 0 ,
н
где
Мс.н, н – момент сопротивления механизма при
номинальном режиме вращения;
М0 – момент, обусловленный потерями холостого
хода;
х – показатель степени.
4.
Введем понятие жесткости механическойхарактеристики механизма, т.е. ее наклон,
как
М с
с
.
х=2
х=1
1. х = 0; с = 0.
2. х = 1; с > 0.
х = –1
х=0
3. х = 2; с > 0.
Мс
4. х = –1; с < 0.
5.
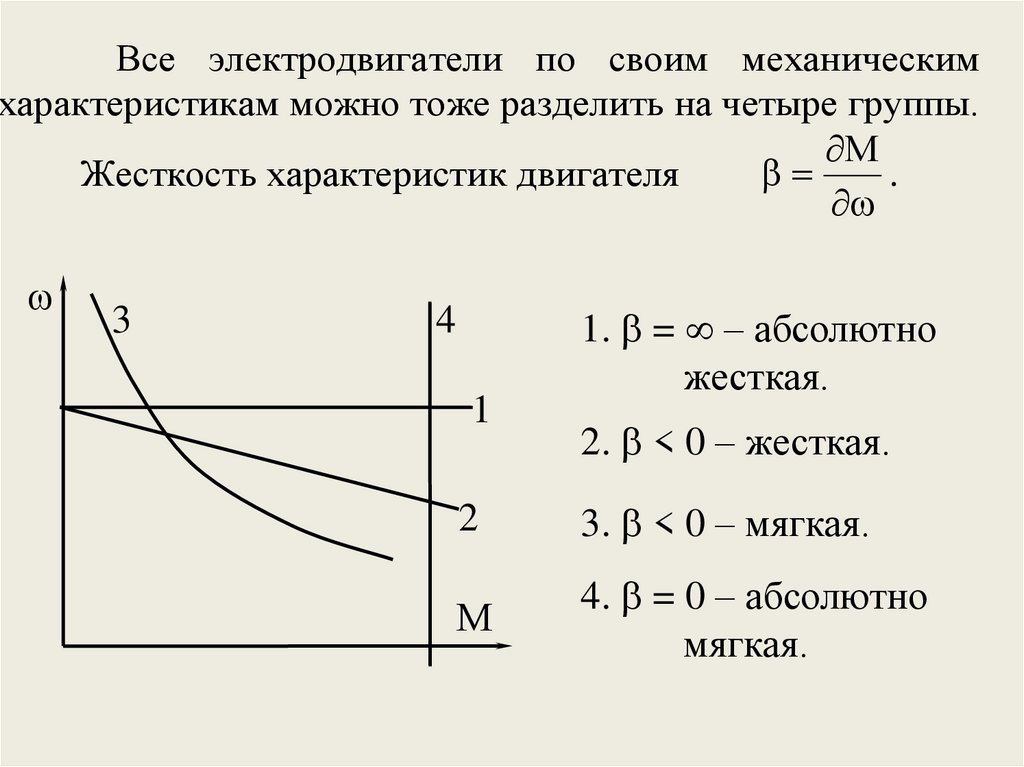
Все электродвигатели по своим механическимхарактеристикам можно тоже разделить на четыре группы.
М
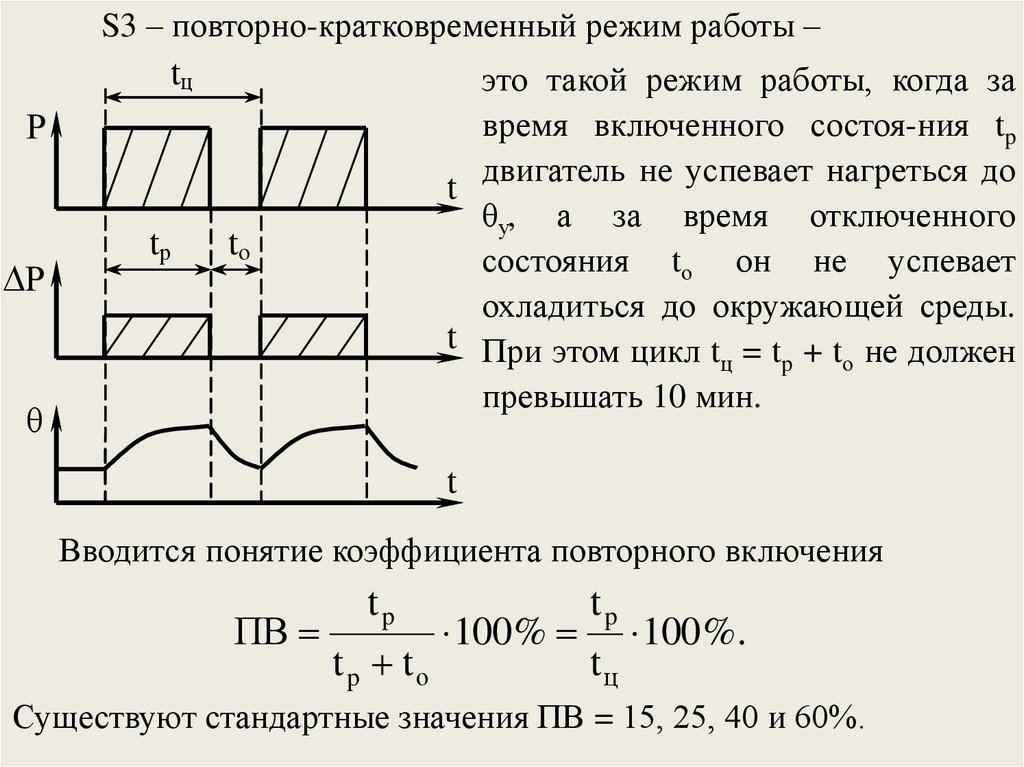
Жесткость характеристик двигателя
.
3
4
1
1. = – абсолютно
жесткая.
2. < 0 – жесткая.
2
3. < 0 – мягкая.
М
4. = 0 – абсолютно
мягкая.
6.
Понятие о статической устойчивости приводаПод статической устойчивостью понимается такое
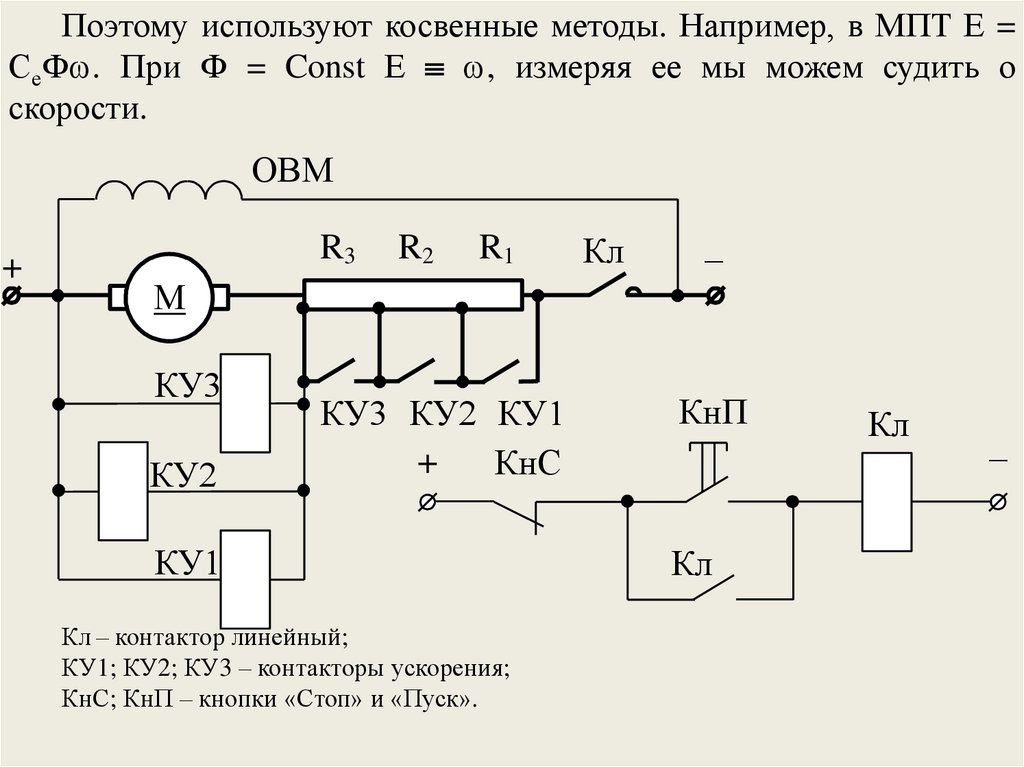
состояние установившегося режима работы привода,
когда при случайно возникшем отклонении скорости от
установившегося значения привод возвращается в точку
установившегося режима.
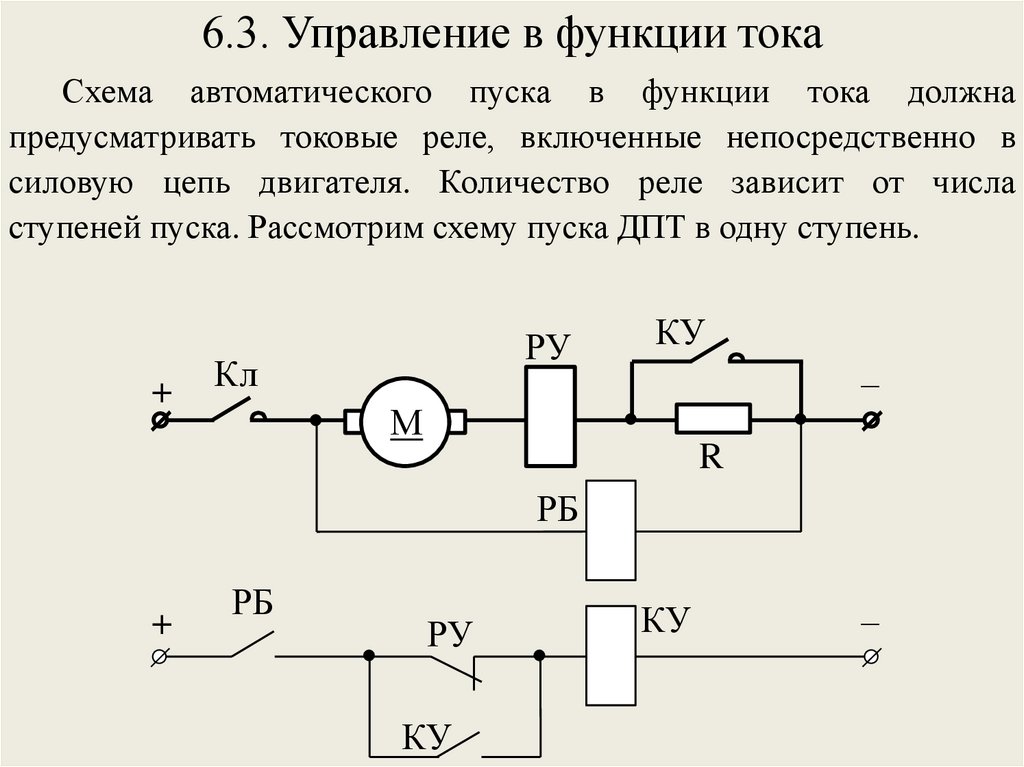
Статически не устойчивая система не возвращается
в равновесное состояние.
Система статически устойчива, если в точке
равновесия выполняется условие
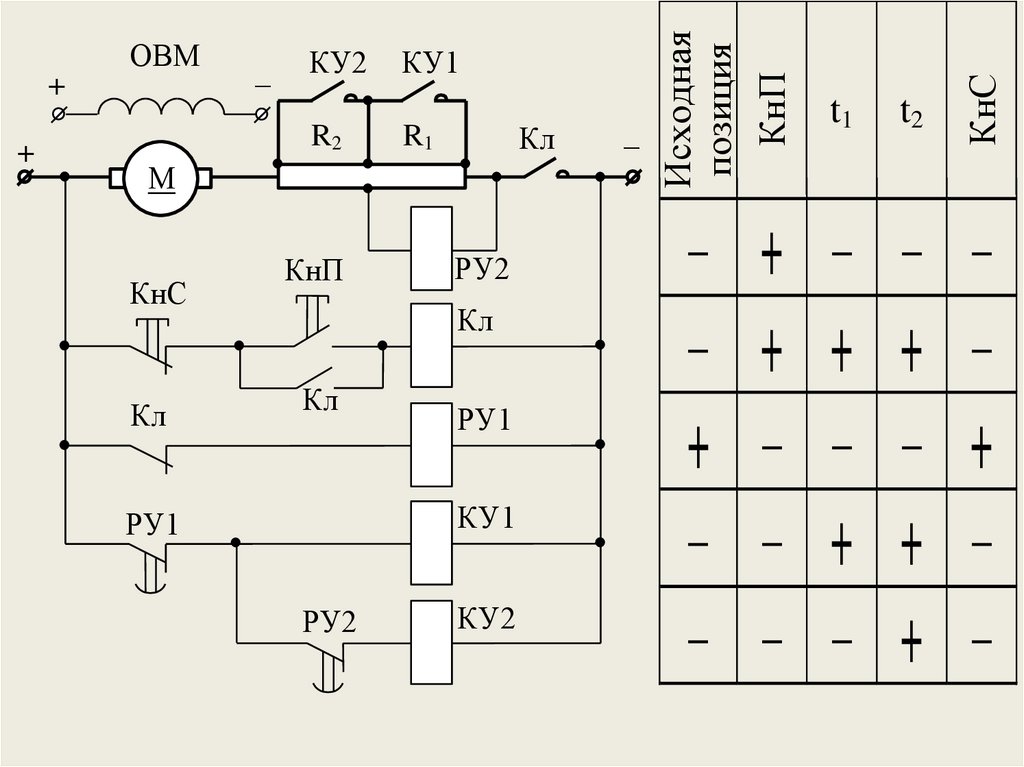
М М с
0;
или с 0.
7.
Возьмем, например, механическую характеристикуасинхронного двигателя М и рабочего механизма Мс.
т.1
М
т.2
т.3
Мс
М
В т.1 с = 0, < 0, – с < 0 условие (11) выполняется.
В т.2 с = 0, > 0, – с > 0 условие (11) не выполняется.
В т.2 достаточно сместиться несколько вправо и двигатель
перейдет в т.1, а если влево, то двигатель остановится, т.к. в т.3
Мп < Мс.
8.
Механические характеристики электродвигателейМеханические характеристики ДПТ независимого возбуждения
Двигательный режим (U > E).
+
–
U
Е
Rр
I
М
М
Rв
iв
Uв
+
–
U = E + I R;
pN
;
k
2 а
E = k ;
M = k I;
R = ra + Rp;
= f(I) – электромеханическая (скоростная) хар-ка;
U
R
I 0 ;
k k
U
– скорость идеаль 0
k
ного холостого хода.
9.
Механическая характеристика = f(M).0
U
R М U R
2 М 0 ,
k k k С С
R
R
2 М I – изменение скорости.
С
С
rа R р1
М н
с2
rа
М н 2
с
ест. Rр=0
н
Rр3>Rр2>Rр1
Rр1
Мкз1
Rр3
Мкз2
Мн
Rр2
М
10.
Построение механической характеристикиМеханическую характеристику можно построить по
паспортным данным: Iн; н; Pн; Uн; н. Так как
характеристика без учета реакции якоря может
приниматься линейной, то достаточно иметь две точки
характеристики: = 0; М = 0 и = н; М = Мн.
Рн
Мн
сн Iн ;
н
Uн
Uн
0
н
.
сн
U н I н rа
11.
Принимается, что половина потерь в двигателеприходится на якорь, т.е.
I н2 rа 0,5 1 н U н I н ;
Uн
;
rа 0,5 1 н
Iн
rа R р
;
нр 0 1 I н
Uн
Uн
I кз
I кз
;
.
М кз М н
R
Iн
Анализ характеристик или их построение можно вести
в относительных единицах:
I
М
R
; I* ; М *
; R*
;
*
0
Iн
Мн
Rн
Uн
* I* R * М * R * .
;
Rн
Iн
12.
Механические характеристики в тормозных режимахСуществуют три вида торможения.
1. Торможение с отдачей энергии в сеть. Это
рекуперация, двигатель переходит в генераторный режим
и работает на сеть. Это возможно при E > U, т.е. > 0.
На графике это во II квадранте выше значения 0, при
этом
R
0 М т 2 ; М = –Мт.
с
Момент на валу стал отрицательным, механическая
энергия со стороны вала преобразуется в электрическую.
13.
2. Динамическое торможение – двигатель отключается от сетии подключается к тормозному резистору.
Rр
Е
U E
E
I
;
R
R
М
M = –Mт;
I
–
+
iв
R
Мт 2 .
с
Характеристики располагаются во втором квадранте и
проходят через начало координат.
14.
IIРекуперация
I
0
Динамическое
торможение
Мс
A
B
C
ЭМТ
М
15.
3.Торможение
противовключением
или
режим
электромагнитного тормоза – это когда на вращающийся
двигатель подается напряжение другой полярности, при этом
приложенное напряжение слагается с ЭДС якоря, ток торможения
определяется
U E
I
.
R
На графике это точка С, в т. B режим короткого замыкания, а в т.
А двигательный режим с дополнительным сопротивлением в цепи
якоря, что поясняется таблицей
Точка
Режим
Соотношение
Двигатель
U -E
А
I
U
E
IR
R
Режим к.з. ( = 0)
U
B
I
U E = 0 IR
R
ЭМТ
U E
C
I
U
E
IR
R
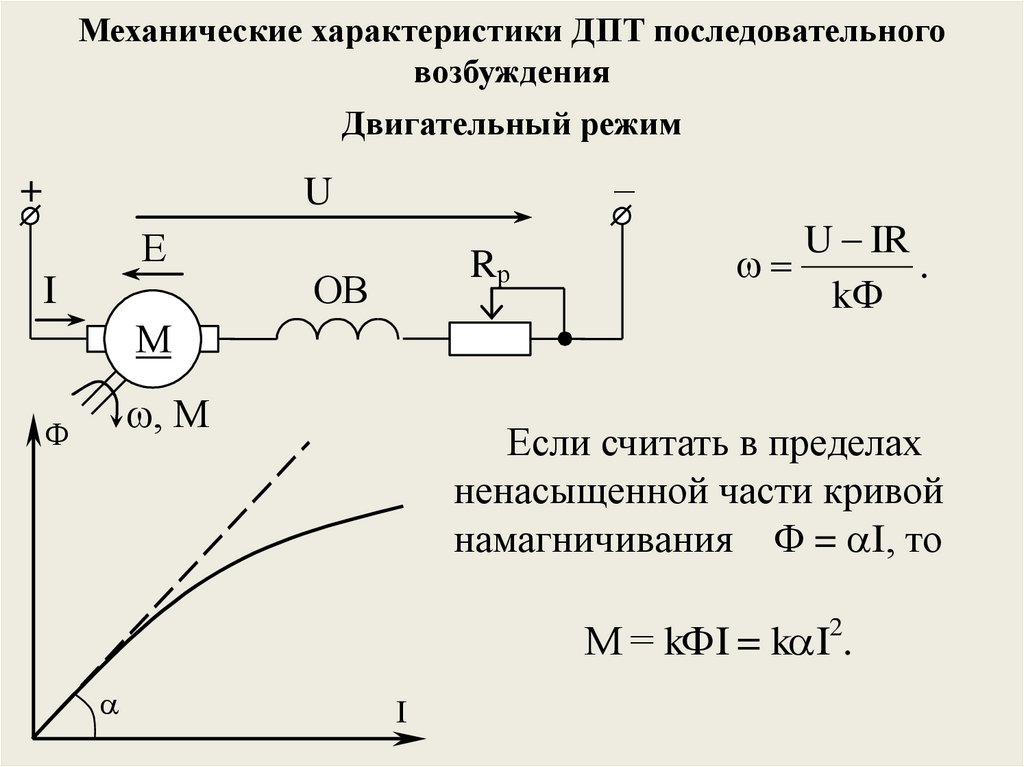
16.
Механические характеристики ДПТ последовательноговозбуждения
Двигательный режим
+
–
U
Е
I
Rр
ОВ
М
, М
U IR
.
k
Если считать в пределах
ненасыщенной части кривой
намагничивания = I, то
2
М = k I = k I .
I
17.
UR
Тогда
;
М k
k
k
А
В.
М
ест. Rp= 0
Rp1
Rp2
Rp2>Rp1
М
18.
Тормозные режимы1. Механическая характеристика двигателя последовательного
возбуждения не имеет пересечения с осью , т.е. не имеет
определенного значения 0, следовательно, он не может перейти
автоматически в генераторный режим. Рекуперация возможна
только после перехода на схему независимого возбуждения.
ест.
А
В
С
М
19.
2.Режим
динамического
торможения
аналогичен
предыдущему двигателю. Но надо иметь ввиду следующую
особенность. Для того, чтобы двигатель возбудился в
генераторном режиме, необходимо изменить полярность
подключения обмотки возбуждения.
Rт
Rт
I
Е
ОВ
Е
I
М
М
+
ОВ
–
На
графике
характеристики
расположены
во
квадранте.Пунктирные
линии
соответствуют
условию
независимым возбуждением.
II
с
20.
3. Режим противовключения возможен в двух случаях:– внешний момент больше момента Мк.з. и двигатель вращается в
противоположную сторону;
– изменяется направление тока в обмотке возбуждения.
21.
Механические характеристики асинхронногодвигателя
Двигательный режим
Из Г-образной схемы замещения, приняв с 1,имеем
М
3Uф2 R '2
.
М
2
2
0 [ R1 R '2 s х1 х '2 ]s
М
R1; R 2; x1; x 2 – параметры обмоток
статора и ротора.
0
s
;
0
2 n 0 2 f
0
;
60
р
R '2
s кр
.
2
R 12 х1 х ' 2
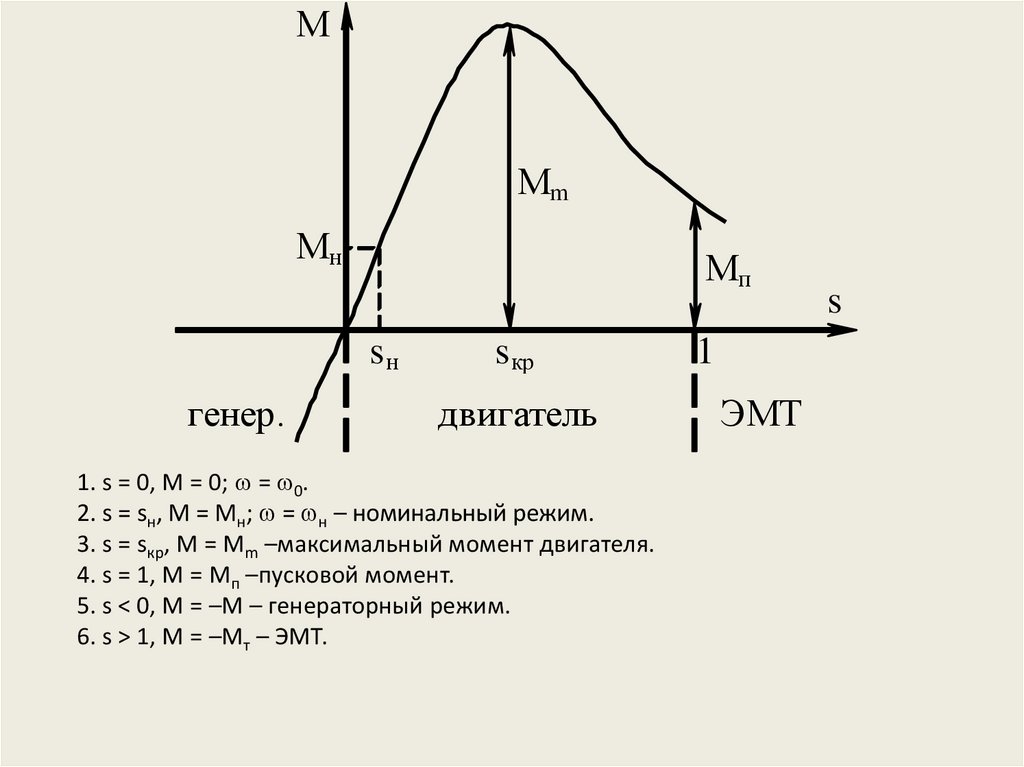
22.
ММm
Мн
Мп
sн
генер.
s кр
двигатель
1. s = 0, M = 0; = 0.
2. s = sн, M = Мн; = н – номинальный режим.
3. s = sкр, M = Мm –максимальный момент двигателя.
4. s = 1, M = Мп –пусковой момент.
5. s < 0, M = –М – генераторный режим.
6. s > 1, M = –Мт – ЭМТ.
1
ЭМТ
s
23.
Формула Клосса2М m
;
М
s s кр
s кр
s
s кр s н 1 ;
2
Мm
.
Мн
Из анализа выражения (18) следует:
1. s > sкр sкр/s 0 M = 2Mm sкр/s – гипербола;
2. s < sкр s/sкр 0 M = 2Mm s/sкр – прямая.
Следовательно, рабочая часть характеристики может
быть признана прямой линией, а нерабочая часть –
гиперболой.
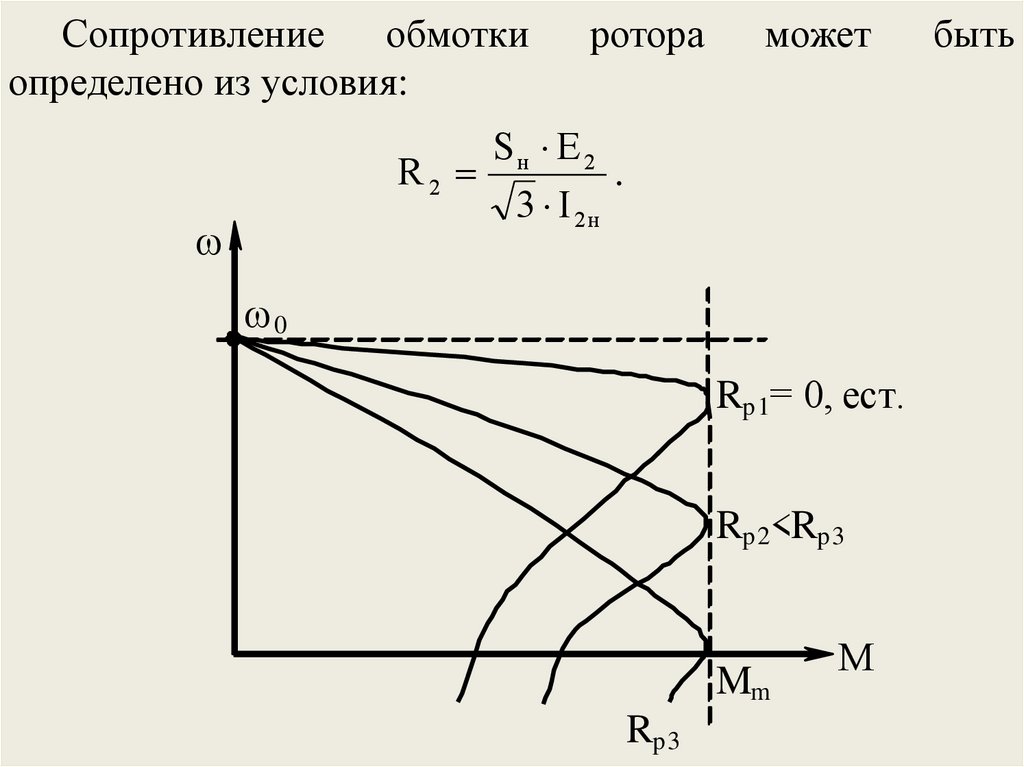
24.
Сопротивлениеобмотки
определено из условия:
ротора
может
Sн Е 2
R2
.
3 I 2н
0
Rp1= 0, ест.
Rp2<Rp3
Mm
Rp3
М
быть
25.
Тормозные режимыАсинхронный
торможения:
двигатель
обладает
режимами
1. АД может автоматически перейти в генераторный
режим, если частота вращения ротора превзойдет
синхронную скорость, т.е.
> 0.
В этом случае в сеть возвращается активная мощность,
т.е. имеем режим рекуперации, при этом АМ продолжает
потреблять реактивную мощность из сети, которая идет на
поддержание вращающегося магнитного поля.
26.
IIРекуперация
I
0
Динам.
тормож.
М
III
IV
27.
2. Динамическое торможение – двигатель отключается отсети, а на обмотку статора подается постоянное напряжение.
+
–
Rp
М
Механическая мощность со стороны
вала преобразуется в электрическую,
которая гасится на сопротивлении в цепи
ротора и его обмотке.
3. Режим противовключения (ЭМТ) – на ходу меняют
чередование фаз при подключении обмотки статора. Магнитное
поле реверсируется, момент на валу двигателя становится
тормозным.
28.
Механические и угловые характеристики синхронногодвигателя
0
Rв
М
М
Генератор
Двигатель
+
–
Абсолютно жесткая ( = ) характеристика
–Мm М Мm ;
= 0.
Момент на валу СД зависит от угла нагрузки Q.
М
29.
Для неявнополюсной машины имеем:М
Мm
Мн
Qн
Qкр
Р mUE
М f Q
sin Q .
0 0 х d
180
Q
mUE
Мm
;
0 х d
Мm
2 2,5(3,5 4);
Мн
0 Q 900 – рабочая часть характеристики.
30.
Режимы торможения:1. Рекуперация возможна, но она не дает снижения
скорости.
Rв
+
–
М
М
2. Динамическое торможение
– СД отключается от сети и
присоединяется к тормозному
резистору. СМ переходит в
генераторный режим.
3.
Противовключение
не
применяется,
т.к.
асинхронный режим при торможении не эффективен.
31.
Регулирование угловой скорости ЭПОсновные показатели регулирования
max
D 10:1.
1. Диапазон регулирования: D
,
min
i
2. Плавность регулирования: пл
,
i 1
если число ступеней регулирования z , то пл 1.
D zпл 1.
Р2
;
Р 2 Р
3. Экономичность:
m
р m
Р t
2q q
1
(Р Р )t
2q
1
q
q
– средневзвешанный,
m – число ступеней.
32.
Для привода переменного тока еще добавляется:cos
Р
– коэффициент мощности;
Р2 Q2
m
cos р m
Р t
q q
– средневзвешанный.
1
Р Q t
2
q
2
q
q
1
4. Стабильность угловой скорости (жесткость
характеристики).
5. Направления регулирования – вверх от основной,
вниз от основной, однозонное, двухзонное.
6. Допустимая нагрузка двигателя при регулировании.
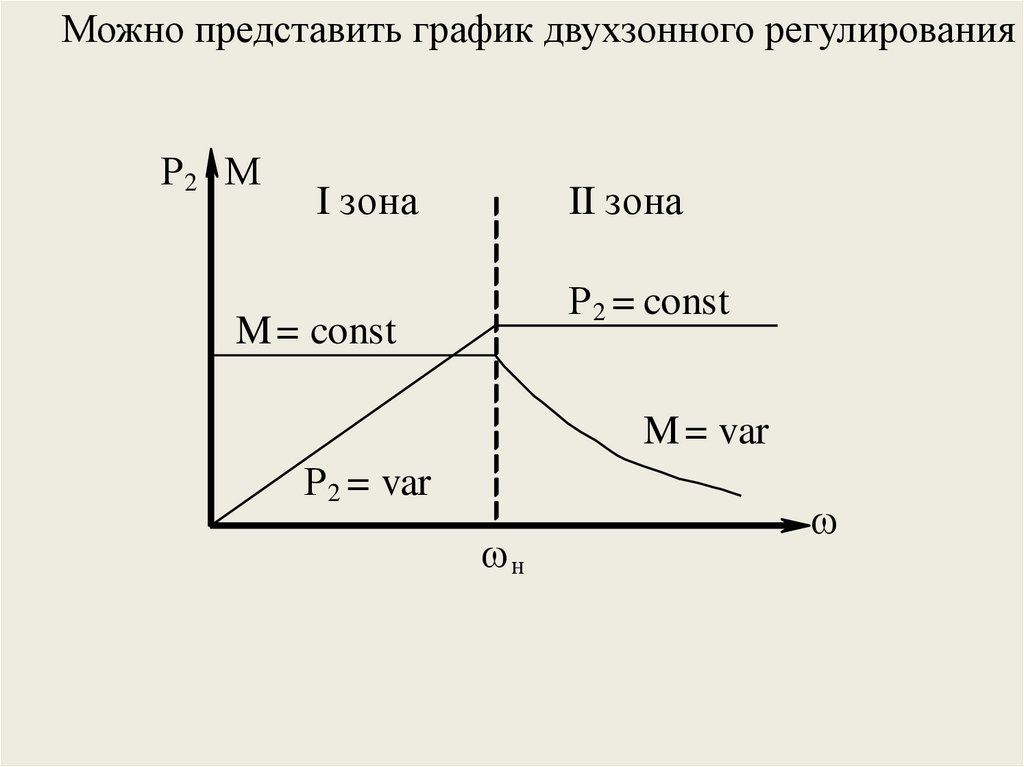
33.
Можно представить график двухзонного регулированияР2 М
I зона
II зона
Р2 = const
M = const
M = var
Р2 = var
н
34.
Регулирование угловой скорости ДПТ независимоговозбуждения
Все способы регулирования вытекают из известного
выражения электромеханической характеристики:
U IR
.
kФ
Их три. Дело в том, как ими управлять.
Изменением магнитного потока ( = var)
1
.
35.
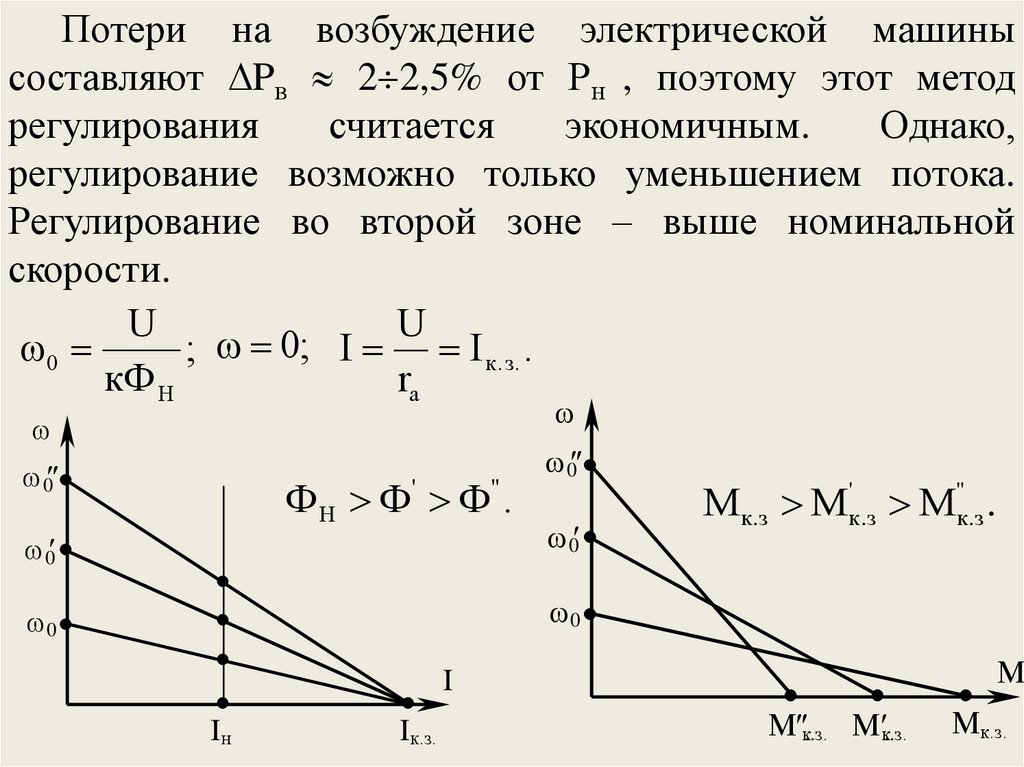
Потери на возбуждение электрической машинысоставляют Pв 2 2,5% от Рн , поэтому этот метод
регулирования
считается
экономичным.
Однако,
регулирование возможно только уменьшением потока.
Регулирование во второй зоне – выше номинальной
скорости.
U
U
0
;
0
;
I I к . з. .
кФ H
ra
0
ФH Ф Ф .
'
''
0
0
0
0
0
Мк.з М'к.з М"к.з .
М
I
Iн
Iк.з.
М к..з. М к..з.
Мк.з.
36.
Импульсное регулирование напряжения (U = var)K
+
К – электронный ключ.
ШИР – широтноимпульсное регулирование
Tк = const;
+
i
Д
U
ОВ
М
iv
–
–
U
Uа.ср
t1
Tк
t2
t
t1
– скважность;
Tk
U
R
Мср
;
2
kФ
(kФ)
Uа.ср = U;
f 800 1200 Гц.
ШИМ – широтноимпульсная модуляция;
t1 = const, f = var.
37.
Реостатно-импульсное регулирование+
–
U
E
ср
К
ср
i
М
Rдоб
t1
– скважность;
t1 t 2
R Э R доб (1 );
ср
t1 t2
t
0
ra R доб (1 )
U
ср
М ср
;
2
kФ
(kФ)
.
0
=1
Мн
=0
Мк.з.
М
38.
Регулирование угловой скорости ДПТпоследовательного возбуждения
E
Iа
М
–
U
+
ОВ Iв
Rр
М
Iш
rш1
rш2
rш3
U = var. Используется любой метод регулирова-ния
подводимого напряжения: регулируемый источник;
система Г–Д; импульсное регулирование; метод
переключения.
U
а)
–
+
Uа
U = 3000 В
Uа = U/N = 500 В
39.
Uб)
+
–
U = 3000 В
Uа = 1000 В
U
в)
+
U = 3000 В
Uа = 1500 В
–
40.
= var.Iв = Iа – Iш;
Iв = Iа;
rш
.
rв rш
U
R
.
M k
k
k
R = var.
ОП < 1
ест. = 1
реостатные
М
41.
Регулирование угловой скорости ЭП переменноготока
Все более широкое применение в электроприводах
имеют асинхронные двигатели, имеющие известные Вам
преимущества перед ДПТ. Однако эти двигатели имеют
ряд
существенных
недостатков,
связанных
с
возможностью
регулирования
угловой
скорости.
Основные методы регулирования вытекают из
соотношения
2 f1
2 о (1 s)
(1 s). ;
p
0 2
s
;
0
PЭЛ 2 s PЭМ .
42.
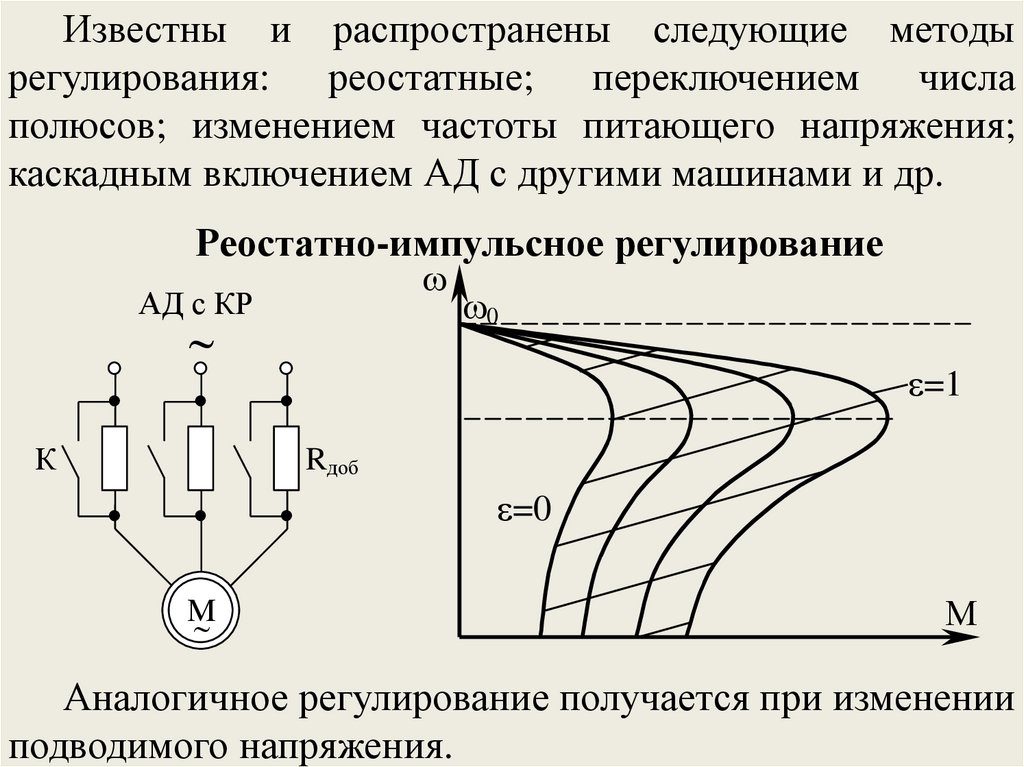
Известны и распространены следующие методырегулирования: реостатные; переключением числа
полюсов; изменением частоты питающего напряжения;
каскадным включением АД с другими машинами и др.
Реостатно-импульсное регулирование
АД с КР
К
0
=1
Rдоб
=0
М
М
Аналогичное регулирование получается при изменении
подводимого напряжения.
43.
АД с ФР0
=1
Rэ=0
М
=0
Rэ=R
М
K
L
область
регулирования
R
44.
Регулирование переключением числа полюсовN
S
N
S
A
N p=2
B
S
N
A
p=1
B
S
A
N
B
p=1
Могут быть различные варианты переключения. Однако соотношение скоростей при
этом составляет 2 : 1.
Электромагнитный
момент
асинхронного
двигателя M , а, в
свою очередь, поток
обратнопропорционален
числу витков обмотки
1/W.
45.
Различные способы переключения дают разное числовитков обмотки в фазе. В зависимости от этого
получаются различные характеристики и условия
регулирования.
01
02
Для
вентиляторной
нагрузки
P = var
M = var
М
01
M = const
02
М
46.
0102
P = const
М
Выпускает промышленность максимум 4хскоростные
АД. В них укладывается две независимые обмотки,
каждая из которых имеет две скорости максимум 6 : 1
(3000 : 500 об/мин).
Частотное регулирование
При регулировании частоты питающего напряжения
надо иметь ввиду следующее:
U1
U1 E1 k f1 или Ф
.
kf1
47.
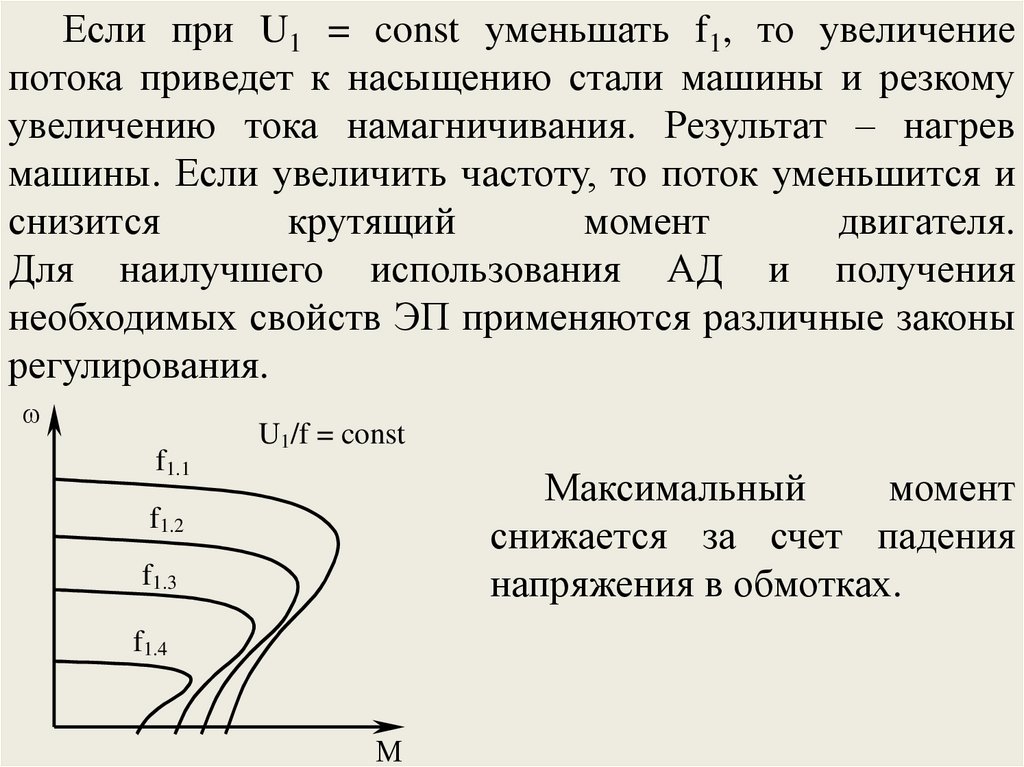
Если при U1 = const уменьшать f1, то увеличениепотока приведет к насыщению стали машины и резкому
увеличению тока намагничивания. Результат – нагрев
машины. Если увеличить частоту, то поток уменьшится и
снизится
крутящий
момент
двигателя.
Для наилучшего использования АД и получения
необходимых свойств ЭП применяются различные законы
регулирования.
f1.1
U1/f = const
Максимальный
момент
снижается за счет падения
напряжения в обмотках.
f1.2
f1.3
f1.4
М
48.
Способ регулирования считается экономичным с плавнымрегулированием, весьма эффективным, но
требующий дорогого
оборудования – преобразователя частоты
(ПЧ).
P = const, U = const
f > fн
0
U
const
f
U Uн
Mm = const
f
Iz
fн
М
Каскадные системы
Каскадные электроприводы позволяют полезно
использовать энергию скольжения АД, повышая при этом
эффективность электропривода.
49.
Принципиальная схема одного из примеров каскада,так называемого асинхронно-вентильным (АВК), при
веден на рисунке.
М
Т
L
B
И
В данном случае часть
возвращается в ту же сеть.
М – АД с ФР;
В – выпрямитель;
И – инвертор;
Т – трансформатор
согласующий;
L – реактор для
сглаживания
выпрямленного тока.
мощности
скольжения
50.
Пример двухдвигательного привода, обеспечивающегоустойчивую работу при низких скоростях.
0
1
М
1
3
М
2
М
2
0
Здесь M1 работает в режиме двигателя, M2 – в режиме
противовключения. Их валы жестко связаны. Получаем
суммарную характеристику 3.
51.
Другой пример, когда одна из машин работает врежиме динамического торможения.
+ –
0
2
М
1
1
М
2
3
М
Коэффициент полезного действия в таком режиме
невелик, работа привода на пониженной угловой скорости
должна быть ограничена по времени.
52.
Рассмотрим пример рабочего электрического вала.Мс1
М
1
М
2
Rдоб
Мс2
53.
Статоры M1 и M2 включены на одну сеть, фазныероторы включены встречно и параллельно им включены
регулируемые резисторы. При Rдоб = 0 электрический вал
превращается в обычные независимые АД. Если Rдоб = ,
то электрические машины работают в режиме сельсинной
передачи угла. Если нагрузки на двигателях одинаковые,
то двигатели вращаются одинаково. Если окажется
нагрузка разной, то в роторной цепи появится
уравнительный ток, который будет подгружать двигатель с
меньшей нагрузкой и разгружать – с большей.
54.
Переходные режимы в ЭПОбщие положения
Переходным или динамическим режимом ЭП называется
режим работы при переходе из одного установившегося состояния
привода к другому, происходящему во время пуска, торможения,
реверсирования и резкого изменения нагрузки на валу.
Эти режимы характеризуются изменениями E, , M и I.
Изучение переходных режимов электропривода имеет большое
практическое значение.
Результаты их расчетов позволяют правильно определить
мощность электродвигателей и аппаратуры, рассчитать систему
управления и оценить влияние работы ЭП на производительность и
качество работы производственных механизмов.
55.
Учитывая, что тепловые процессы обладаютзначительной инерцией, то считают их не влияющими на
переходный процесс. Тогда уделяется внимание
механическим и электромагнитным факторам, т. е.
процесс носит название электромеханического. Иногда
магнитные процессы не соизмеримы по времени с
механическими, тогда в расчете учитываются только
механическая инерция движущихся масс ЭП.
В результате анализа переходных процессов появляется
необходимость построить зависимости:
i = f1(t);
M = f2(t);
= f3(t);
l = f4(t).
56.
Пуск ДПТ независимого возбуждения+ K
Rв
Rр
+
i
U
М
0
с
ОВ
с
М(I)
–
–
Мс(Iс)
Мк.з(Iк.з)
Допустим: Ф = const; U = const; Mc = const; La = 0;
R = Rp + ra.
U c iR ;
d
M ci J
Mс
dt
Решая эту систему получим:
U
JR d M с R
2
2
с
с dt
с
57.
илиd
0 Tм
с ,
dt
где
JR J с
Tм 2
с
M к.з
электромеханическая постоянная времени привода.
Решим дифференциальное уравнение с правой частью
d с
0 с с .
;
dt Tм Tм
В общем виде решение следующее
t
с Се Tм ,
где С – постоянная интегрирования, находится из
условия:
при t = 0 = нач.
58.
Характер изменения скорости подчиняется законуэкспоненты. Теоретически переходный процесс длится
бесконечно. На практике он считается оконченным при
достижении скорости 0,95 0,98 от установившегося
значения, а это соответствует
t п ( 3 4 )Т м .
Решая аналогично систему (26) только относительно
тока или момента, мы получим следующие уравнения:
i I с ( I нач I с )е
t
Tм
;
М Mс (Mнач Mс )е
n n с ( n нач n с )е
t
Tм
t
.
Tм
;
59.
Тогда имеем пуск в общем виде:с ( нач с )е
t
Tм
Частные случаи:
– пуск двигателя при нач = 0 и Мс 0
с (1 е
t
Tм
);
– пуск двигателя при нач = 0 и Мс = 0
0 (1 е
t
Tм
).
.
60.
Рассмотрим процесс пуска во времениI n
I1
I
nc
I2
Ic
n
0
tx1
tx2
tx3
tx
t
I1 = (2 2,5)Iн – максимальный пусковой ток;
I2 = (1,15 1,25)Iн – минимальный пусковой ток или ток
переключения.
61.
txТогда
I 2 I с ( I1 I с )е
отсюда
I1 I с
t х Т мх ln
,
I2 Iс
где
Tмx
,
Rх
Т мх J 2 ,
с
х – ступень пуска;
Rx – сопротивление цепи якоря на этой ступени;
Тмх – электромеханическая постоянная на х-й ступени.
tx1 > tx2 > tx3;
tx = (3 4)Tм.
62.
Расчет мощности ЭПОбщие положения
Правильный выбор двигателя по мощности очень
важен. Применение двигателя с заниженной мощностью
может вызвать нарушение в работе механизма, снижение
производительности, аварию и выход его из строя.
Использование же двигателя завышенной мощности
приводит к увеличению капитальных затрат, снижению
электрических показателей, уменьшению КПД и т. д.
Кроме того необходимо еще правильно выбрать
двигатель по исполнению, т. е. по степени защиты, по
способу охлаждения и по климатическому исполнению.
Это все учитывают конкретные условия эксплуатации ЭП.
63.
Для выбора мощности двигателя важно иметьграфическое
изображение
зависимости
момента
сопротивления от времени
называемая нагрузочной
диаграммой механизма. Или зависимость скорости
исполнительного механизма от времени, называемая
диаграммой скорости электропривода.
Очень часто приведенные графические зависимости
носят случайный характер. Тогда для них определяются
общепринятые статистические характеристики, которые
учитываются
при
уточнении
мощности
электродвигателей.
64.
Потери энергии в ЭППри
управлении
ЭП
возникают
потери
в
электродвигателях, которые разделяют на постоянные и
переменные.
В общем случае можно записать, что суммарные
потери в двигателе
P Pk P ,
где Pk – постоянные потери; P – переменные
потери.
Для МПТ:
P = I2R;
P M( 0 ) M 0
Pэм
.
0
0
Для АД:
P 3(I12R1 I'2 R '2 );
2
R1
R1
P M 0s 1
Pэмs 1
.
R '2
R '2
65.
Особое значение имеют потери в переходных режимах.Имеет смысл находить потери энергии за время
переходного процесса, в виде:
tП . П .
tП . П
0
0
AП . П P (t )dt ( Pk P )(t )dt.
Так как постоянные потери в переходных процессах по
сравнению с переменными малы, то ими можно
пренебречь.
tП.П
Тогда для МПТ: A П.П M( 0 )dt.
0
Если двигатель запускается в холостую (Mc = 0), то из
уравнения движения следует: dt J d тогда
M
0
A П.0 J( 0 )d
0
или
A П.0 J
2
0
2
.
66.
Пуск двигателя в холостую связан с потерями в нем,равными запасенной кинетической энергии приводом.
Полезная работа так же равна запасу кинетической
энергии, т. е. расход электрической энергии из сети равен:
А эл А П.0 А П.0 J 02 .
При пуске двигателя под нагрузкой (Mc = const) потери
энергии составят:
t
t
d
A ПП М( 0 )dt (М с J )( 0 )dt.
dt
0
0
Решая выражение (33), получим
t
2
c
A П.П J 0 c
M c 0 t П сdt ,
2
0
2
2
– потери на
где
A П 0 дин J 0 c c J 0
2
2
разгон инерционных масс;
П.П
П.П
П.П
67.
tA П.С М с 0 t П.П dt – потери, выз0
ванные наличием момента нагрузки.
Проводя аналогичный анализ различных переходных
процессов можно дать ряд рекомендаций по более
эффективному использованию электропривода:
1. При пуске в холостую (Mc = 0) меньше потерь.
П.П
2. Торможение противовключением при Mc = 0
сопровождается потерями AТ.П. 3 AП.дин
3. Торможение противовключением при Mc 0 потери
меньше.
4. Реверсирование при Mc = 0 дает потери
AР.П. 4 AП.дин.
5. В АМ потери в роторе и статоре перераспределяются
в зависимости от соотношения R1/R'2.
68.
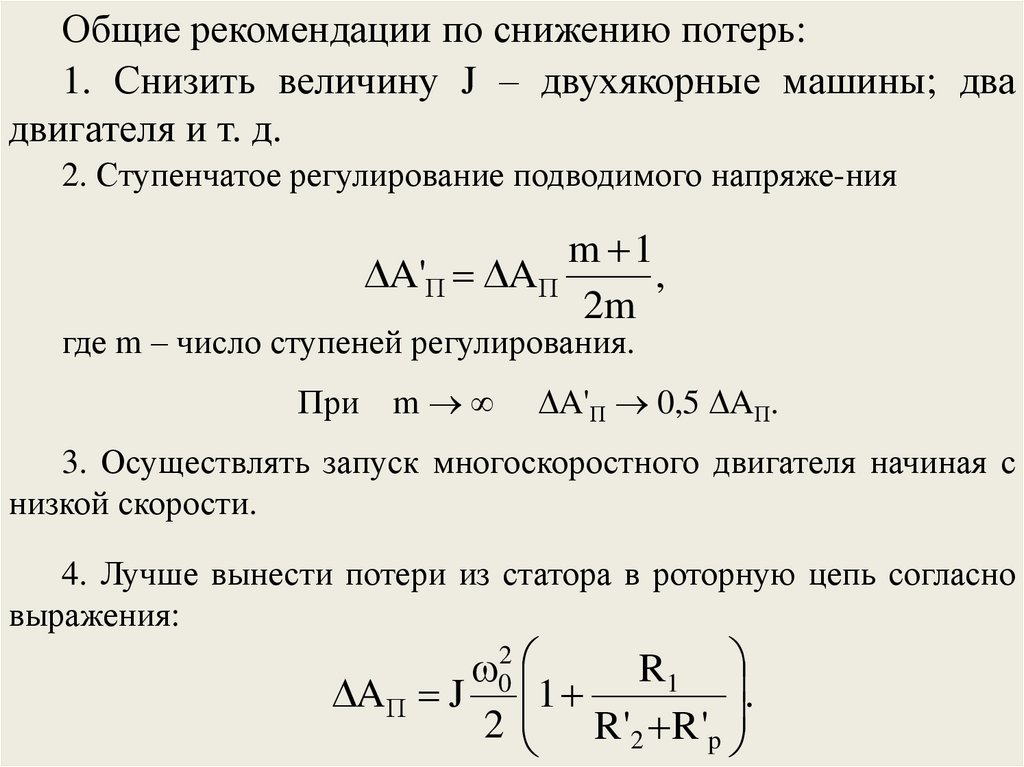
Общие рекомендации по снижению потерь:1. Снизить величину J – двухякорные машины; два
двигателя и т. д.
2. Ступенчатое регулирование подводимого напряже-ния
m 1
A'П AП
,
2m
где m – число ступеней регулирования.
При
m
A'П 0,5 AП.
3. Осуществлять запуск многоскоростного двигателя начиная с
низкой скорости.
4. Лучше вынести потери из статора в роторную цепь согласно
выражения:
02
R1
A П J
1
.
2 R '2 R 'p
69.
5.3. Классы изоляцииПотери энергии в электродвигателе вызывают нагрев его
отдельных элементов. Допустимый нагрев двигателя определяется
нагревостойкостью применяемых изоляционных материалов.
Чем больше нагревостойкость, тем при той же мощности
меньше размеры двигателя или при тех же размерах можно
увеличить его мощность.
Лучшему использованию двигателя способствует так же более
совершенная система охлаждения.
Изоляционные материалы, применяемые в электрических
машинах,
делятся
на
следующие
основные
классы
нагревостойкости:
70.
изоляция класса Aд 105 С;
изоляция класса E
д 120 С;
изоляция класса B
д 130 С;
изоляция класса F
д 155 С;
изоляция класса H
д 180 С;
изоляция класса C
д>180 С.
Соблюдение установленных ограничений по допустимой
температуре нагрева обеспечивает срок службы изоляции
электрических машин 15÷20 лет.
71.
Превышение допустимых ограничений ведет кразрушению изоляции обмоток и резкому сокращению срока
эксплуатации двигателя.
Так, для изоляции класса А превышение допустимой
температуры на 8 – 10о С сокращает срок службы вдвое.
Расчетная температура окружающей среды в нормальных
условиях принимается оc= 40 С.
Обычно речь идет о превышении температуры обмоток
над температурой окружающей среды:
o.c .
(35)
72.
5.4. Нагревание и охлаждение двигателяДля
упрощения
анализа
тепловых
процессов
в
электродвигателях принимаются следующие допущения:
1) двигатель рассматривается как однородное тело с одинаковой
температурой во всех его точках;
2) теплоотдача во внешнюю среду пропорциональна первой
степени разности температур двигателя и окружающей среды;
3) температура охлаждающей среды постоянна;
4) теплоемкость двигателя, мощность тепловых потерь и
теплоотдача не зависят от температуры двигателя.
На основе этих допущений составим уравнение теплового
баланса двигателя при неизменной нагрузке:
Qdt A dt Cdt,
73.
где Q – количество теплоты, выделяемое двигателемв единицу времени, Дж/с;
А – теплоотдача двигателя, Дж / (с ∙ оС);
С – теплоемкость двигателя, Дж / оС;
Qdt – все тепло, выделяемое в двигателе;
Cdt – тепло, идущее на нагрев самого двигателя;
Aτdt – тепло, отдаваемое двигателем в окружающую среду.
Разделим уравнение на Adt и получим:
Q
C d
A
A dt
или
d
y Тн ,
dt
74.
Qy – установившееся
A
превышения температуры;
где
(конечное)
значение
С – постоянная времени нагрева двигателя –
Tн
А
время, в течение которого превышение температуры от τ = 0
достигло бы τу без отдачи тепла в окружающую среду.
Решением уравнения (37) является:
t
t
T
T
y 1 e 0 е ,
н
н
где τ0 – начальное превышение температуры.
Если τ0 = 0, то
t
T
y 1 e .
н
75.
01у
0
02
Tн
t
t
Tо
Процесс нагревания или охлаждения
оконченным через (3 ÷ 4) Тн или (3 ÷ 4) Tо.
можно
считать
76.
5.5. Режимы работы ЭПРазличные условия работы производственных механизмов
обусловливают различные режимы работы электроприводов,
которые классифицируются на восемь режимов с условным
обозначением от S1 до S8.
Рассмотрим с вами только три основных, остальные получаются
соответствующим сочетанием основных.
S1 – продолжительный номинальный режим работы.
При длительном режиме работы Р
двигатель
достигает
t установившегося
значения
температуры θу, обусловлен-ного
t потерями ΔP в этом двигателе.
Р
Р
θ
θу
t
77.
S2 – кратковременный режим работы –Р
Р
θ
tр
это такой режим, при котором за
время включенного состоя-ния tp
t
двигатель не успевает нагреться до
установившегося
значения
температуры θу, а за время
t отключенного
состоя-ния
он
успевает
охладиться
до
окружающей среды.
t
Приняты следующие стандартные продолжительности
включения 10, 30, 60 и 90 мин.
78.
S3 – повторно-кратковременный режим работы –tц
это такой режим работы, когда за
время включенного состоя-ния tp
t двигатель не успевает нагреться до
θу, а за время отключенного
состояния tо он не успевает
охладиться до окружающей среды.
t При этом цикл t = t + t не должен
ц
p
о
превышать 10 мин.
Р
Р
tр
tо
θ
t
Вводится понятие коэффициента повторного включения
ПВ
tp
tp tо
100 %
tp
tц
100 %.
Существуют стандартные значения ПВ = 15, 25, 40 и 60%.
79.
5.6. Расчет мощности двигателяпри продолжительном режиме работы (S1).
Для правильного расчета мощности двигателя необходимо знать
нагрузочную диаграмму, представляющую зависимости: P = f(t);
M = f(t) или I = f(t). Если выбрать двигатель завышенной мощности,
то это приведет к завышенным капитальным затратам, мощность
двигателя будет не использована, а работать он будет с пониженным
η и коэффициентом мощности. Заниженная мощность приведет к
превышению допустимой температуры нагрева, т. е. к сокращению
срока службы изоляции.
80.
Продолжительный режим может быть двух видов:а) при постоянной нагрузке.
Тогда двигатель выбирается из каталога по известной нагрузке
рабочего механизма при соблюдении условия
Ррасч Ркат (запас не более 15 %).
б) при переменной нагрузке.
В этих случаях пользуются, чаще всего, методом средних потерь
m
Pср ( Pi t i / t ц ),
i 1
где Рi – мощность потерь на i-м интервале; ti –
продолжительность i-го интервала; m– число интервалов в цикле tц.
81.
Сущность метода заключается в том, что если найденныесредние потери Рср для выбранного двигателя не больше его
номинальных потерь Рном, т. е. Рср Рном, то будет выполняться
условие
ср ≤ ном ≤ доп.
Отсюда следует, что
при Рср > Рном, двигатель перегревается;
при Рср < Рном, двигатель недоиспользован.
Так как потери в двигателе Р = I2r, то можно использовать
метод эквивалентных величин. Например, эквивалентный ток
n
tц
1 2
IЭ
i ( t )dt
tц 0
2
I
i t i
i 0
tц
тогда двигатель выбирается из условия Iэ Iном.
,
82.
Если соблюдать условие М = сI,n
то
Mэ
2
M
i Ti
i 1
tц
;
М э М ном .
Если соблюдается условие P = M
и
= const,
n
то
Рэ
2
P
i t i
i 1
tц
,
Р э Рном .
83.
5.7. Расчет мощности двигателя прикратковременном режиме работы
Для
кратковременного
режима
работы
выпускаются
специальные двигатели, имеющие стандартные мощности для
стандартных
длительностей
работы.
Если
реальный
график
отличается от стандартного, то он приводится к стандартному.
Можно для кратковременного режима работы использовать и
двигатель общего применения. При этом надо иметь ввиду
следующее.
84.
Ру > доп
Ркр
доп
2
1
t
tр
Если Рном = Ркр, то двигатель окажется недоиспользован.
Кривая 1. Правильно выбранный двигатель за время работы
должен нагреться до доп (кривая 2).
85.
5.8. Расчет мощности двигателя приповторно-кратковременном режиме работы
Двигатель
выбирается
по
фактическому
коэффициенту
повторного включения и необходимой мощности. Если реальный
график нагрузки отличается от стандартного , то он приводится к
стандартному и уже по нему выбирается из каталога. Приведение
производится по выражению
Pст Pε
ε
,
ε ст
где
ε
tр
tр tо
.
86.
6. Системы автоматического управления ЭП6.1. Общие сведения
Управление ЭП заключается в осуществлении пуска,
регулирования скорости, торможения, реверсирования, а
также поддержания режима работы привода в
соответствии с требованиями технологического процесса.
Ручное управление:
низкая производительность;
невозможность дистанционного управления;
в мощных приводах управление затруднено
или вообще не возможно.
Автоматическое управление ЭП является одним из
основных условий повышения производительности
механизмов.
87.
В системе управления ЭП используются: релейно-контактныеаппараты; усилители; преобразовательные устройства и датчики;
бесконтактные логические элементы; микропроцессоры и микро
ЭВМ и т.п.
Различают системы управления:
разомкнутые – изменение возмущающих воздействий приводит
к изменению ранее заданного режима работы
привода;
замкнутые
–
независимо от состояния возмущающих
воздействий можно поддерживать заданный
режим работы привода.
88.
Для обеспечения чтения схем и для их проектирования имеетсясистема условных обозначений.
Различают цепи главного тока (силовые цепи), которые
изображаются утолщенными линиями. И цепи вспомогательные –
это цепи управления. Они изображаются более тонкими линиями.
Два типа схем:
принципиальная схема – содержит изображение элементов всех
аппаратов и машин без учета их фактического расположения в
пространстве . Такая схема позволяет изучить принцип работы и
определить возможные неисправности;
89.
схема соединений (монтажная) – изображается разводкапроводов цепей с указанием их сечения, марок и способов их
прокладки. При этом учитывается место их фактического
расположения.
На схемах контакты различных устройств изображаются в
положении, которое они занимают при отключенных катушках этих
устройств.
А
Кр.
Kл
А
Б
Б
+
Kл
а)
–
А
Kл
Б
Зел.
б)
+
в)
Kл
–
90.
Контактор линейный Кл имеет два типа контактов: одинзамыкающий, другой размыкающий. В случае а катушка Кл
обесточена, по схеме б будет гореть зеленая сигнальная лампа. Если
на катушку Кл подать напряжение, то якорь контактора изменит
свое положение. Замкнутый контакт разомкнется, а другой
соответственно, замкнется. Загорится красная сигнальная лампа, а
зеленая погаснет. Это будет обозначать, в данном случае, что
контактор включен.
Условные обозначения элементов электрических силовых и
вспомогательных цепей, принятых при проектировании и
построении электрических схем.
91.
обмотка компенсационнаяобмотка параллельного
возбуждения МПТ, обмотка
независимого возбуждения
предохранитель плавкий
контакт замыкающий с
замедлителем, действующим при
срабатывании
контакт замыкающий с
замедлителем, действующим при
возврате
контакт размыкающий с
замедлителем, действующим при
срабатывании
резистор постоянный
диод
контакт размыкающий с
замедлителем, действующим при
возврате
контакт замыкающий
контакт замыкающий,
разрывающийся под током, для
коммутации сильноточной цепи
контакт размыкающий
контакт замыкающий
дугогасительный для коммутации
сильноточной цепи
92.
катушка электромеханическогоустройства
контакт с автоматическим
возвратом при перегрузке
электротепловое реле
контакт замыкающий с
механической связью
выключатель кнопочный
нажимной, с замыкающим
контактом
выключатель кнопочный
нажимной, с размыкающим
контактом
выключатель кнопочный без
самовозврата, нажимной с
возвратом посредством
вторичного нажатия кнопки
выключатель трехполюсный
Y
двигатель асинхронный
трехфазный, соединенный в
треугольник, с короткозамкнутым ротором
машина синхронная трехфазная
явнополюсная с обмоткой
возбуждения и с пусковой
короткозамкнутой обмоткой на
роторе; обмотка статора
соединена в звезду
машина асинхронная трехфазная
с фазным ротором, обмотка
которого соединена в звезду (Y);
обмотка статора соединена в
Y
треугольник ( )
93.
6.2. Управление в функцииугловой скорости (ЭДС)
Автоматическое управление двигателем можно осуществить в
функции скорости, тока нагрузки и времени. Иногда управление
двигателем совершается в функции пути, если рабочий механизм
совершает поступательное движение. Рассмотрим типовые узлы
релейно-контактного управления пуском двигателей постоянного
тока.
Управление в функции угловой скорости требует прибора
контроля угловой скорости с последующим воздействием на
соответствующий аппарат. Таким прибором может быть
тахогенератор, установленный на валу двигателя. Однако это
дополнительное оборудование усложняет схему.
94.
Поэтому используют косвенные методы. Например, в МПТ Е =СеФ . При Ф = Const Е , измеряя ее мы можем судить о
скорости.
ОВМ
+
R3
R2
R1
М
КУ3
КУ2
КУ3 КУ2 КУ1
+
КнС
КУ1
Кл – контактор линейный;
КУ1; КУ2; КУ3 – контакторы ускорения;
КнС; КнП – кнопки «Стоп» и «Пуск».
Кл
–
КнП
Кл
Кл
–
95.
К недостатку этого метода пуска двигателя можно отнести то,что двигатель может остаться на реостатной позиции, если по
каким-либо причинам возросла во время разгона нагрузка на валу,
не предусмотренная расчетами.
Рассмотрим типовую схему кнопочной станции. Особо следует
обратить внимание на контакт Кл, шунтирующий КнП. Кнопка КнП
остается включенной в течение времени пока она нажата. Если
кнопку отпустить, то под воздействием пружины контакт
разомкнется и двигатель будет отключен от сети. При срабатывании
линейного контактора его контакт Кл шунтирует КнП и катушка
контактора останется под напряжением. Такой прием называется
«стать на самоподпитку», этот прием применяется очень широко.
96.
Каждый контактор КУ настроен на срабатывание при различныхнапряжениях Uку1 < Uку2 < Uку3; т.е. при достижении двигателем
определенной скорости 1 срабатывает КУ1. Своими контакторами
он закорачивает часть пускового сопротивления R1. Дальнейший
рост скорости приводит к срабатыванию последовательно КУ2, а
затем КУ3. Последний шунтирует оставшуюся часть резистора и
двигатель выходит на естественную характеристику. Процесс
разгона завершается.
Недостатком этой схемы является то, что требуются контакторы
с различным напряжением срабатывания. Этот недостаток
устраняется другим способом схемного включения контакторов.
Посмотреть самостоятельно.
97.
6.3. Управление в функции токаСхема автоматического пуска в функции тока должна
предусматривать токовые реле, включенные непосредственно в
силовую цепь двигателя. Количество реле зависит от числа
ступеней пуска. Рассмотрим схему пуска ДПТ в одну ступень.
+
РУ
Кл
КУ
–
М
R
РБ
+
РБ
РУ
КУ
КУ
–
98.
РУ – реле токовое, реле ускорения;КУ – контактор ускорения;
РБ – реле блокировочное, tРБ > tРУ, tКУ.
При включении от тока якоря срабатывает РУ и разрывает свои
контакты РУ в цепи питания катушки КУ. Двигатель разгоняется
при введенном в цепь якоря резисторе R. Контакт РБ не позволяет
контактору КУ включиться вместе с подачей напряжения на
двигатель, т. к. tРБ > tРУ, tКУ. Когда ток опускания реле РУ достигает
значения тока переключения I2, то контакты РУ замыкают цепь
катушки КУ, который срабатывает и шунтирует пусковой резистор
R. Контакт в цепи управления КУ шунтирует контакт РУ, что
исключает воздействие РУ на повторный бросок тока в цепи якоря.
99.
Достоинство данного принципа управления заключается в том,что все переключения производятся при заданных токах в цепи
якоря.
Недостатком такого принципа является то, что в случае
повышения нагрузки во время пуска схема может остаться с
включенным резистором. Это может привести к выходу его из
строя.
100.
6.4. Управление в функции времениДля автоматизации пуска используются различные реле
времени:
механические,
электромагнитные,
электронные,
пневматические и т. д. Необходимая выдержка времени каждого
реле определяется на основании пусковой диаграммы.
При настройке реле необходимо учитывать время срабатывания
контакторов, которое составляет для контакторов постоянного тока
0,1 ÷ 0,4 с, а для контакторов переменного тока 0,05 ÷ 0,07 с.
Принцип работы реле времени необходимо посмотреть.
Рассмотрим следующую схему
101.
+–
КУ2
R2
КУ1
Кл
R1
М
КнС
Кл
КнП
РУ2
Кл
Кл
РУ1
КУ1
РУ1
РУ2
КУ2
–
2
t1
t2
КнС
+
Исходная
Исх
позиция
по
КнП
ОВМ
1
– + – – –
– + + + –
+ – – – +
– – + + –
– – – + –
–
–
+
–
–
+
+
–
–
–
–
+
–
+
–
–
+
–
+
+
–
–
+
–
–
102.
РУ– реле ускорения, реле времени;КУ– контактор ускорения.
Пуск двигателя происходит в соответствии с таблицей.
Исходная позиция: получает питание только катушка РУ1 через
контакт Кл. Катушки КУ1 и КУ2 питание не получают, т. к. контакт
РУ1 разомкнут.
Нажимаем КнП: получает питание катушка Кл, замыкается
силовой контакт Кл и Кл, шунтирующий КнП, теряет питание
катушка РУ1, получает питание катушка РУ2 за счет прохождения
пускового тока по резистору R1, разрывается контакт РУ2.
103.
По истечении времени t1, времени срабатывания РУ1:замыкается контакт РУ1, получает питание катушка КУ1,
шунтируется резистор R1, катушка РУ2 теряет питание, пошел
отсчет времени t2.
По истечении времени t2, времени срабатывания РУ2:
замыкается контакт РУ2, катушка КУ2 получает питание,
шунтируется резистор R2, двигатель выходит на естественную
характеристику.
Нажатие КнС приводит схему в исходное состояние, двигатель
останавливается.
104.
Принцип имеет достоинство в том, что в любом случаедвигатель выйдет на естественный режим. Однако, завышение
нагрузки может привести к превышению пускового тока, от этого
существует соответствующая защита.
6.5. Типовые узлы схем управления
торможением ДПТ
Чаще всего в автоматизированных установках
используются режимы динамического торможения и
противовключения.
Ниже
приведены
схемы
с
использованием
изложенных
ранее
принципов
управления.