







 software
softwareSimilar presentations:








")

Розробка автоматизованої системи керування об’єктом "Підтримка рівня води у лаві шахти"
1.
Міністерство освіти і науки УкраїниПавлоградський коледж
Національного технічного університету
“Дніпровська політехніка”
Курсовий проект
З дисципліни: “Мікропроцесорні системи”
Тема: Розробка автоматизованої системи керування
об’єктом
“Підтримка рівня води у лаві шахти”
Виконавець: студент групи
КС-1-19
Тихонов А.О.
Керівник проекту: Герасимюк В.І.
2.
Мета роботиРозробити автоматизовану
систему керування об’єктом
“Підтримка рівня води у лаві шахти ”
на мові низького рівня – Assembler
3.
Огляд аналогівВодонапірні вежі
Рожновського, призначені для
регулювання нерівномірності
водоспоживання, зберігання
резервного запасу води.
Рисунок 1 Водонапірна вежа Рожновського
4.
Рисунок 2 Структурна схема системи керуванняОпис структурної схеми системи керування:
1.
2.
3.
4.
5.
6.
БЖ – блок живлення, за його допомогою на вхід контролера подається напруга.
БК – блок комутації.
МК – мікроконтролер MCS-51, який координує роботу об’єктів управління МПС.
Відцентровий насос та помповий насос – підтримують рівень води у лаві шахти.
Нижній та верхній датчики – контролюють рівень води у лаві шахти.
Т.Н. («рівень нижній»), Т.С. («рівень середній»), Т.В. («рівень верхній») – відображають
поточний стан рівня води .
5.
Мікроконтролер MCS-51Intel MCS-51 (i8051) – сімейство мікроконтролерів, розроблених фірмою Intel у 1980
році для використання у вбудовуваних системах.
Мікроконтролери сімейства 8051 мають такі апаратні особливості:
• внутрішній ОЗП обсягом 128 байт;
• 4096 байт вбудованої пам'яті програм;
• 128 байт вбудованої пам'яті даних;
• адресація 64 Кбайт пам'яті програм і 64 Кбайт пам'яті даних.
Рисунок 3 Структурна схема мікроконтролера MCS
8051
6.
Рисунок 4Відцентрові насоси використовуються
для транспортування рідин шляхом
перетворення кінетичної енергії
обертання в гідродинамічну енергію
потоку рідини. Обертальна енергія, як
правило, передається від двигуна або
електродвигуна.
Рисунок 5 Насос помпового
типу
Насос помпового типу
призначений для перекачування
води. Найчастіше використовують
для відкачування води з кабельних
траншей, затоплених підвалів,
будівельних каналів та інших
конструкцій.
7.
Рисунок 6 Поплавковий датчик рівня водиПоплавковий датчик – прилад
який використовується для виміру і контролю
рівня рідини в резервуарі.
Рисунок 7 RGB світлодіод
RGB світлодіоди виконують
функцію світлових транспарантів
і відображати інформацію про
рівні води.
8.
ПускачМагнітний пускач електромеханічний комутаційний
апарат, призначений для керування
живленням електродвигунів
Рисунок 8 Пускач
9.
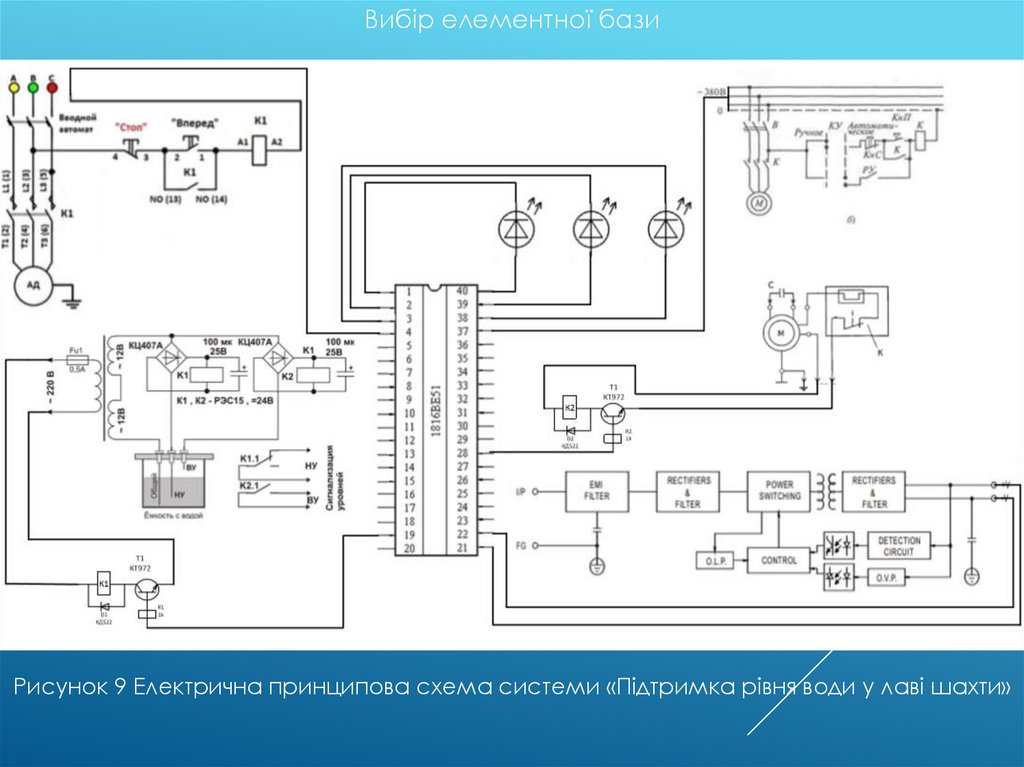
Вибір елементної базиРисунок 9 Електрична принципова схема системи «Підтримка рівня води у лаві шахти»
10.
Опис структурної схеми джерела живленняБлок живлення - вторинне джерело живлення, призначене для
забезпечення живлення електроприладу електричною енергією.
Основним призначенням блоку живлення LRS-75-24 В є незалежне
живлення від вхідного пристрою. Завдяки такому блоку
забезпечується вентиляція, освітлення, напруга і зв'язок.
Рисунок 10 Електрична схема блоку живлення
11.
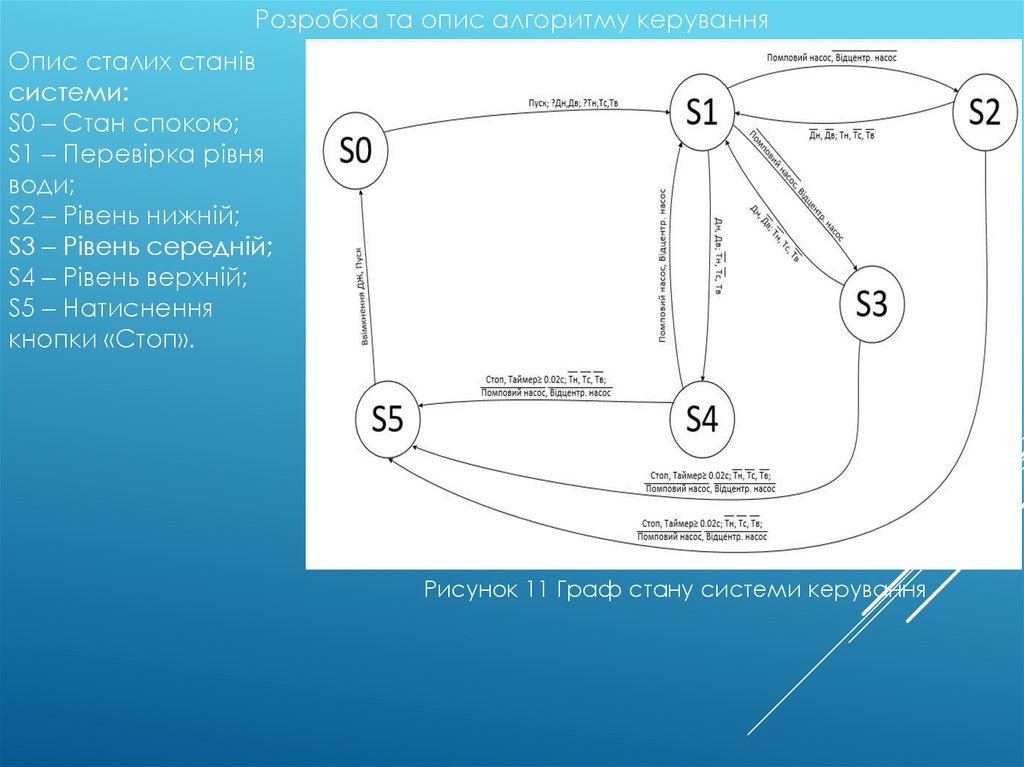
Розробка та опис алгоритму керуванняОпис сталих станів
системи:
S0 – Стан спокою;
S1 – Перевірка рівня
води;
S2 – Рівень нижній;
S3 – Рівень середній;
S4 – Рівень верхній;
S5 – Натиснення
кнопки «Стоп».
Рисунок 11 Граф стану системи керування
12.
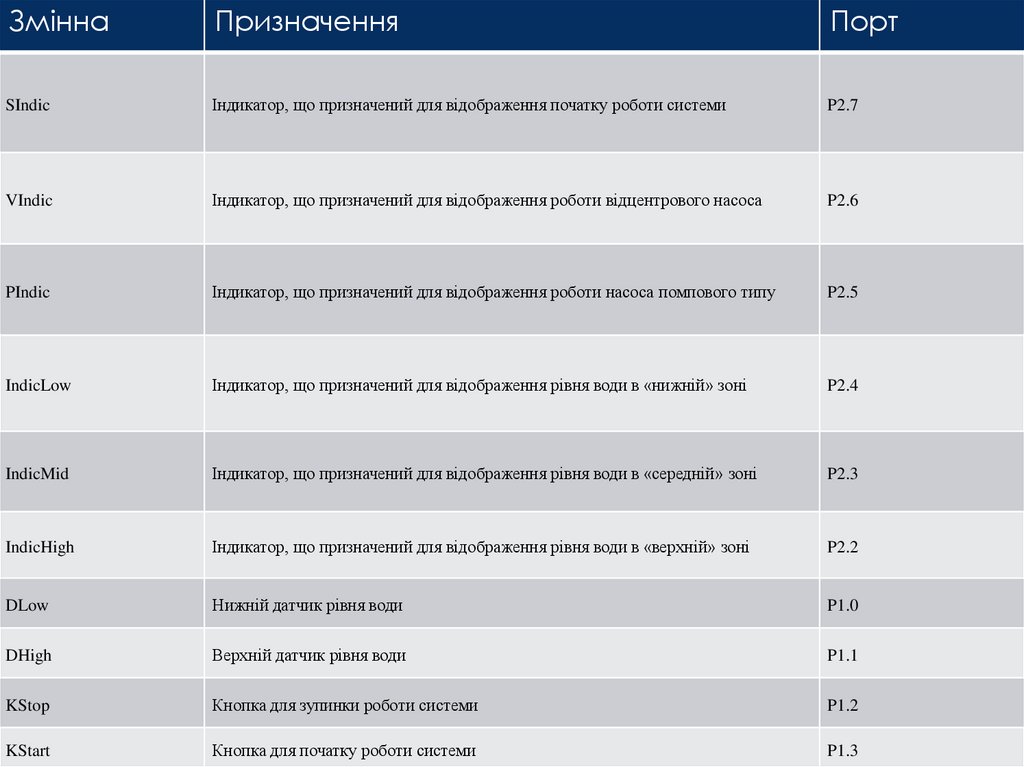
ЗміннаПризначення
Порт
SIndic
Індикатор, що призначений для відображення початку роботи системи
P2.7
VIndic
Індикатор, що призначений для відображення роботи відцентрового насоса
P2.6
PIndic
Індикатор, що призначений для відображення роботи насоса помпового типу
P2.5
IndicLow
Індикатор, що призначений для відображення рівня води в «нижній» зоні
P2.4
IndicMid
Індикатор, що призначений для відображення рівня води в «середній» зоні
P2.3
IndicHigh
Індикатор, що призначений для відображення рівня води в «верхній» зоні
P2.2
DLow
Нижній датчик рівня води
P1.0
DHigh
Верхній датчик рівня води
P1.1
KStop
Кнопка для зупинки роботи системи
P1.2
KStart
Кнопка для початку роботи системи
P1.3
13.
Опис програмного забезпеченняДля написання програмного забезпечення була використана мова
програмування низького рівня - Assembler. Налаштування програми
для системи керування виконано в програмі MCStudio.
У програмі використовувались наступні команди:
SET - присвоєння порту;
CLR - обнулення;
SETB - встановлення біта в логічну одиницю;
JMP - безумовний перехід;
JB - перехід за умови, що біт встановлений;
14.
MC Studio – це інтегральне середовищерозробки програмного забезпечення для
мікроконтролерів серії MCS-51, яке має
симулятор
оточення,
що
дозволяє
промоделювати
пристрої,
що
оточують
мікроконтролер в реальній системі.
15.
ВИСНОВКИУ ході розробки програмного забезпечення було
вивчено особливості програмування мовою низького
рівня - Assembler. Поглиблені практичні навички
роботи з середовищем програмування низького
рівня MC Studio.