









 physics
physics mechanics
mechanicsSimilar presentations:










Уравнение Лагранжа второго рода
1.
Новосибирский Государственный Архитектурно-СтроительныйУниверситет (Сибстрин)
ЛЕКЦИИ ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ.
ДИНАМИКА
ЛЕКЦИЯ 13.
УРАВНЕНИЕ ЛАГРАНЖА ВТОРОГО РОДА
Кафедра теоретической механики
2. План лекции
(1736-1813)Я прожил жизнь. Я добился признания
как математик. Я никогда не
испытывал к кому-нибудь ненависти. Я
не сделал ничего дурного, и мне будет
легко умирать.
Жозеф Луи Лагранж
•Уравнение Лагранжа
• Основная задача динамики в обобщенных
координатах
• Случай потенциальных сил
• Рекомендации к решению задач
• Задача
•Заключение
3. Уравнения Лагранжа второго рода
Цель: Получить систему Д.У. для определениязаконов движения системы
q1 q1 (t ),
q2 q2 (t ),
qs qs (t )
Запишем принцип Даламбера-Лагранжа в
обобщенных координатах:
Aакт Aин (Q j Q ин
j ) q j 0
j
Qj F
акт
k
k
Q
ин
j
F
k
ин
k
r k
q j
- обобщенные силы,
r k
q j
- обобщенные силы инерции.
УРАВНЕНИЕ ЛАГРАНЖА II- РОДА
4.
q1 ,..., q s независимы,каждый из коэффициентов при
q1 ,..., q s равен нулю
j 1,..., s
Q j Qин
j 0,
(1)
2
T
m
v
Выразим Q ин
через
кинетическую
энергию
системы
k k / 2
j
Сила инерции любой из точек системы:
Fkин mk ak mk d vk / dt ,
Q
ин
j
d vk rk
mk
dt q j
преобразуем правую часть
d vk rk
rk
d
d rk
(vk
) vk (
)
dt q j dt
q j
dt q j
УРАВНЕНИЕ ЛАГРАНЖА II- РОДА
( 2)
5.
Qин
j
d
r
r
d
k
k
mk (vk
) vk (
)
dt
q
dt
q
j
j
d r k r k
r k
vk
q j
dt
t
k q j
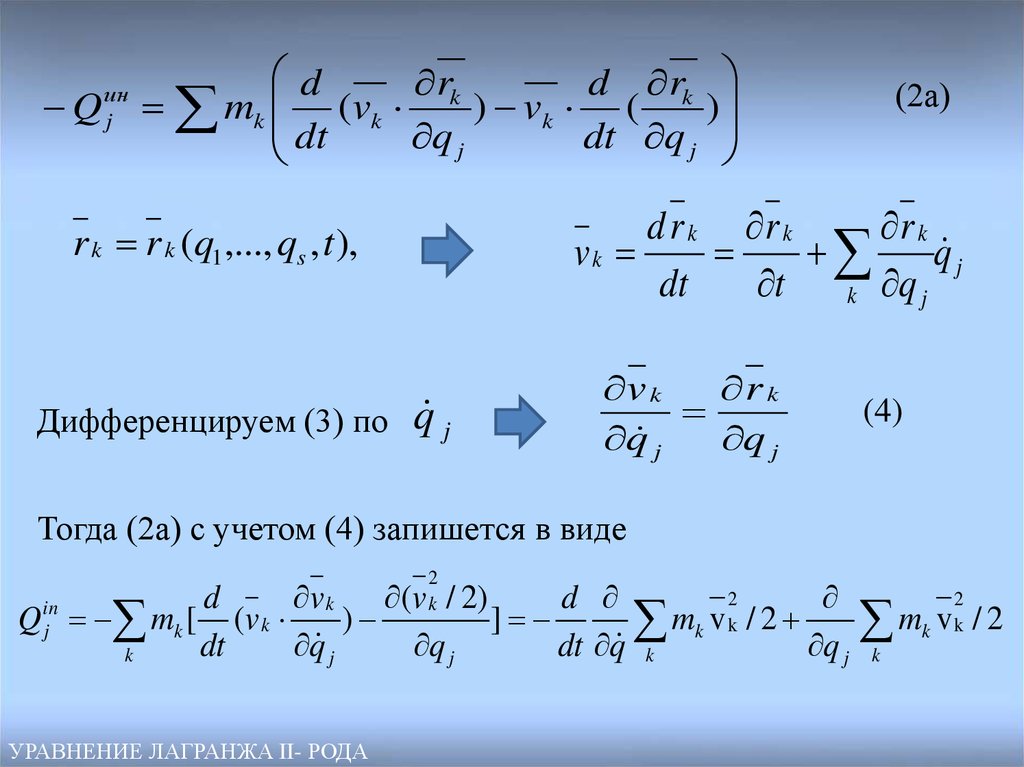
r k r k (q1 ,..., qs , t ),
Дифференцируем (3) по
(2а)
q j
v k
r k
q j
q j
(4)
Тогда (2а) с учетом (4) запишется в виде
2
k
2
d
v k (v / 2)
d
Q mk [ (v k
)
]
mk v k / 2
dt
q j
q j
dt q k
q j
k
in
j
УРАВНЕНИЕ ЛАГРАНЖА II- РОДА
m v
k
k
2
k
/2
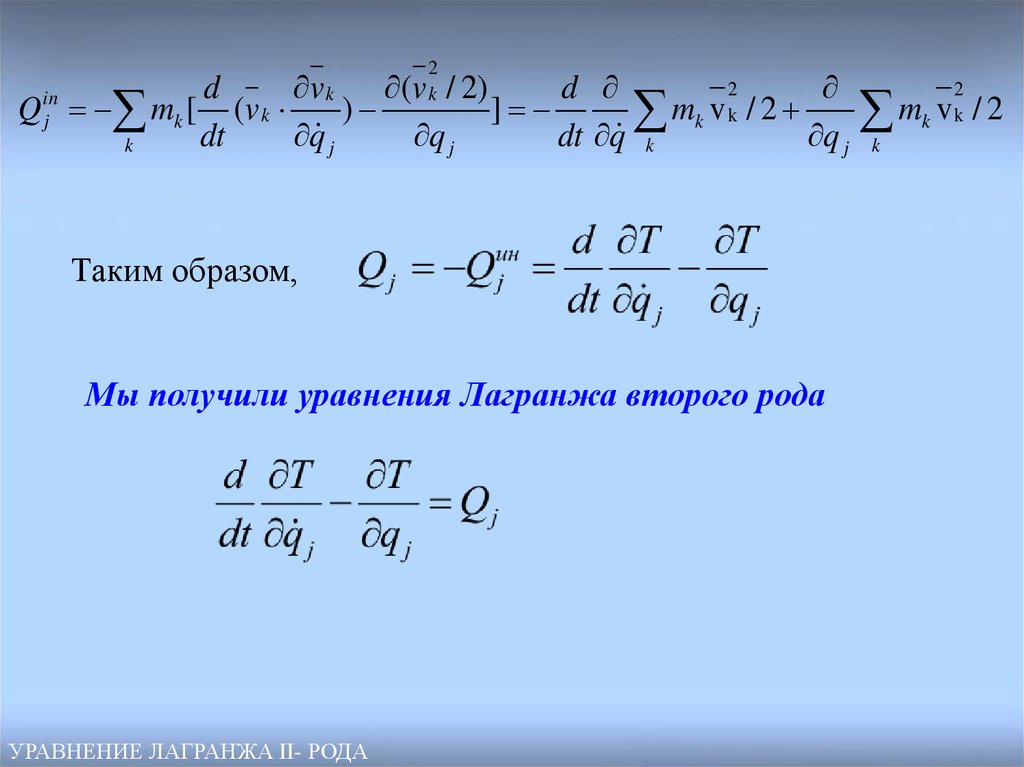
6.
2k
2
d
v k (v / 2)
d
Q mk [ (v k
)
]
mk v k / 2
dt
q j
q j
dt q k
q j
k
in
j
Таким образом,
Мы получили уравнения Лагранжа второго рода
УРАВНЕНИЕ ЛАГРАНЖА II- РОДА
m v
k
k
2
k
/2
7.
Основная задача динамики в обобщенных координатах состоит втом, чтобы, зная обобщенные силы Q1…Qs и начальные условия,
определить обобщенные координаты q1…qs как функции времени.
Случай потенциальных сил
Если действующие на систему силы потенциальные, то можно
Л-II записать в виде:
d (T П ) Т П
d T T
П
0
0,
dt q q j q j
dt q j1
q j
j
Последнее равенство справедливо потому, что
потенциальная энергия П зависит только от координат
q1…qs, а от обобщенных скоростей не зависит
L Т П
УРАВНЕНИЕ ЛАГРАНЖА II- РОДА
П
qj
-называется функцией Лагранжа
0
8.
Уравнения Лагранжа позволяют:1. Решить основную (обратную) задачи динамики в
обобщенных координатах – по известным обобщенным
силам Q1 ,..., Qs и начальным условиям найти закон
движения системы q1 q1 (t ), q2 q2 (t ),
qs qs (t )
2. Решить прямую задачу динамики – по заданному
закону движения
Q1 ,..., Qs
найти обобщенные силы
А по ним уже восстанавливать активные силы,
действующие на систему.
Уравнения Лагранжа являются основным
инструментом исследования сложных механических
систем.
УРАВНЕНИЕ ЛАГРАНЖА II- РОДА
9. Рекомендации к решению
1. Выбрать механическую систему и проверитьсвязи на применимость.
(если связь не идеальная – перевести силу трения в разряд
активных сил; если связь неудерживающая – рассматривать
только те возможные перемещения, которые удерживают
точки на этой связи).
2. Изобразить все активные силы (и реакции
неидеальных связей)
3. Определить число степеней свободы s и ввести
обобщенные координаты q1 ,..., q s
РЕКОМЕНДАЦИИ К РЕШЕНИЮ Л- II
10. Рекомендации к решению Л-II
4. Получить зависимость кинетическойэнергии в виде T T (q1 ,..., q s , q 1 ,..., q s , t )
5. Найти обобщенные силы Q1 ,..., Qs
(взять qi 0, i j, q j 0, составить уравнение A j F
Выразить все
s k через qi ,
Aj F
акт
k
акт
k
sk ,
k
получить выражение
s k Q j q j
и найти
Qj )
6. Написать начальные условия Н.У.: q j (0) q j 0 , q j (0) q j 0
k
7. Составить уравнения Лагранжа и проинтегрировать их с
учетом Н.У.
РЕКОМЕНДАЦИИ К РЕШЕНИЮ Л- II
11. Задача
Дано: масса тележки равна m1, масса катка m2,Определить: ускорение тележки вдоль
горизонтальной плоскости под действием
приложенной к ней силы F , если каток при этом
катится по тележке без скольжения, массой колес
пренебречь
F
12. Решение
1. Система имеет две степени свободы . В качествеобобщенных координат выберем координату x тележки и
координату s центра масс С катка катка относительно
тележки. Тогда уравнения Л-II для системы будут:
d T T
;
Q
1
dt x x
2.
2
где
v
C
T
Q
2
s
(а)
T2 m v / 2 J c / 2
T1 m1 x / 2
d T
dt s
2
2 c
x s
2
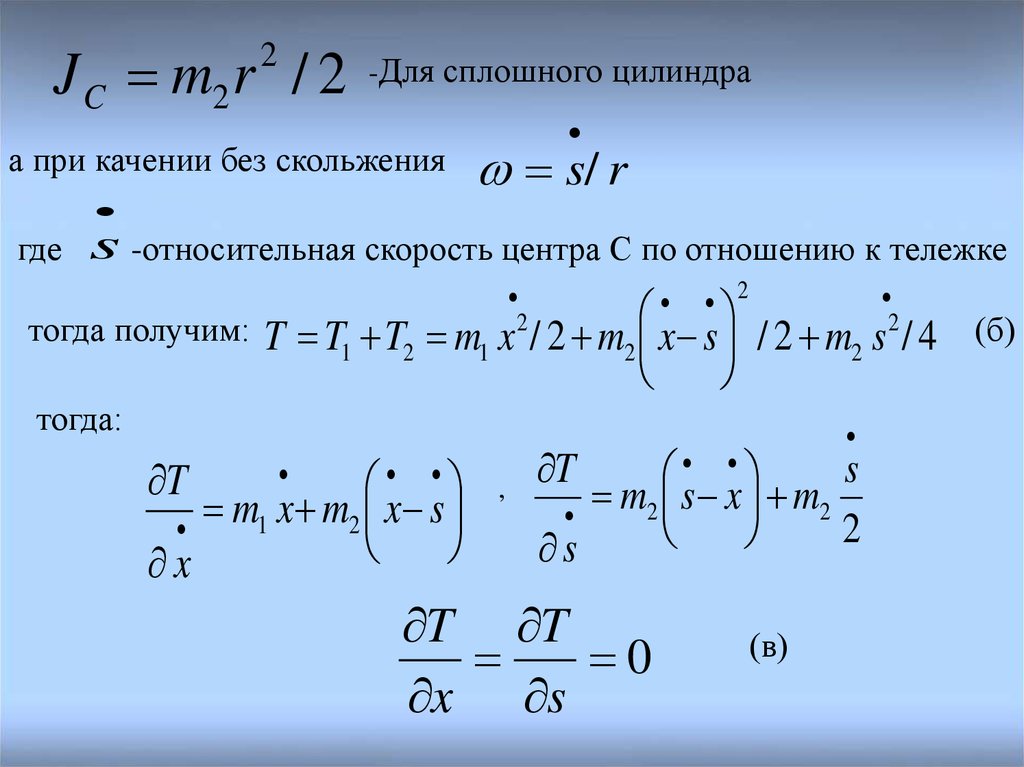
13.
J C m2 r / 22
-Для сплошного цилиндра
а при качении без скольжения
где
s/ r
s -относительная скорость центра С по отношению к тележке
тогда получим:
2
2
2
T T1 T2 m1 x / 2 m2 x s / 2 m2 s / 4
тогда:
T
m1 x m2 x s
x
,
T
s
m2 s x m2
2
s
T T
0
x s
(в)
(б)
14.
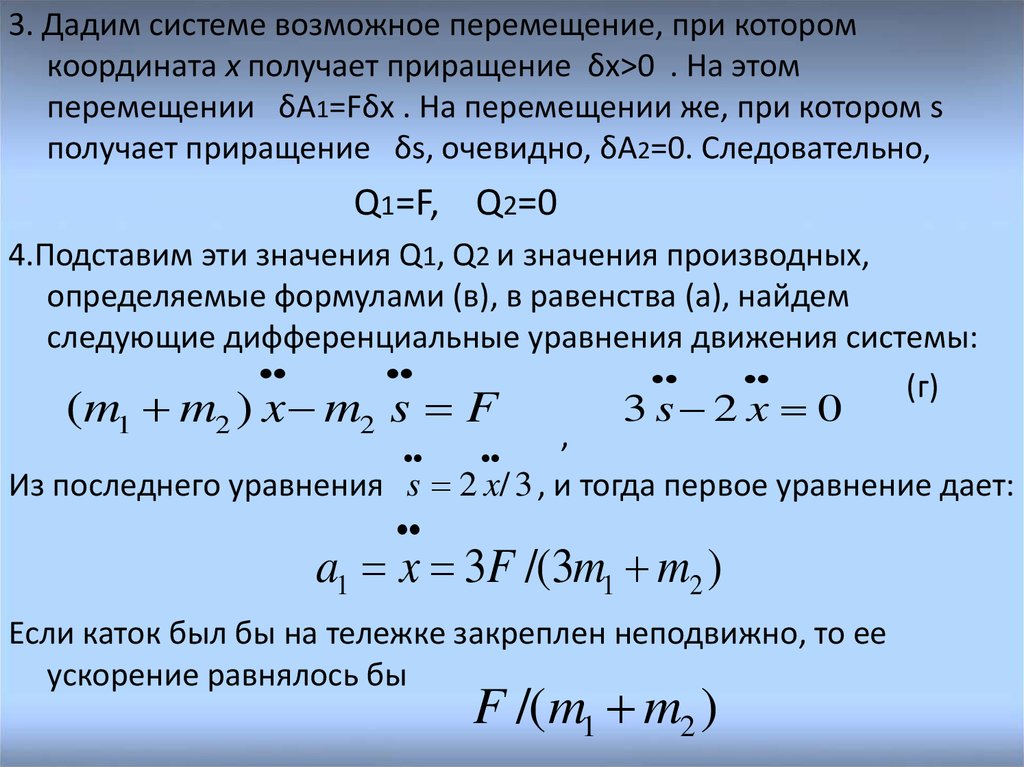
3. Дадим системе возможное перемещение, при которомкоордината х получает приращение δx>0 . На этом
перемещении δA1=Fδx . На перемещении же, при котором s
получает приращение δs, очевидно, δА2=0. Следовательно,
Q1=F, Q2=0
4.Подставим эти значения Q1, Q2 и значения производных,
определяемые формулами (в), в равенства (а), найдем
следующие дифференциальные уравнения движения системы:
(г)
3 s 2 x 0
(m1 m2 ) x m2 s F
,
Из последнего уравнения s 2 x/ 3 , и тогда первое уравнение дает:
a1 x 3F /(3m1 m2 )
Если каток был бы на тележке закреплен неподвижно, то ее
ускорение равнялось бы
F /( m1 m2 )
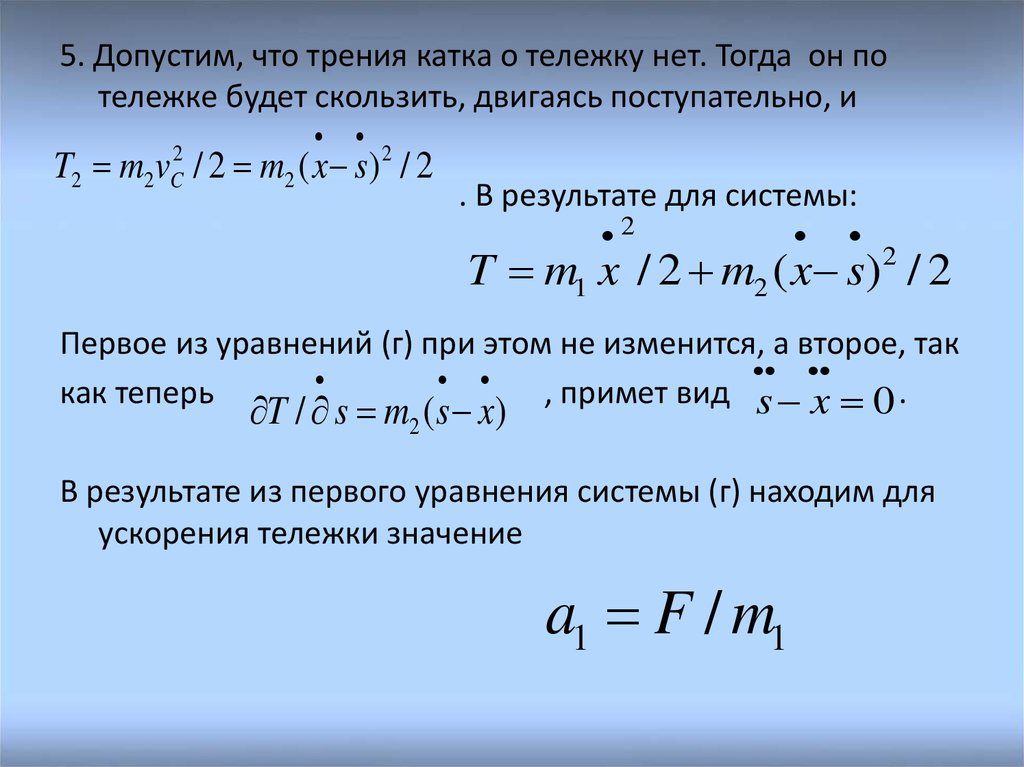
15.
5. Допустим, что трения катка о тележку нет. Тогда он потележке будет скользить, двигаясь поступательно, и
T2 m v / 2 m2 ( x s) 2 / 2
2
2 C
. В результате для системы:
2
T m1 x / 2 m2 ( x s) / 2
2
Первое из уравнений (г) при этом не изменится, а второе, так
как теперь
, примет вид s x 0 .
T / s m2 (s x)
В результате из первого уравнения системы (г) находим для
ускорения тележки значение
a1 F / m1
16. Заключение
1. В обобщенных координатах принцип Даламбера-Лагранжапринимает вид уравнений Лагранжа второго рода
d T T
Qj ,
dt q q j
j 1,..., s.
2. Уравнения Л-II представляют собой систему из s
дифференциальных уравнений второго порядка
относительно обобщенных координат q1 ,..., q s
s
- число степеней свободы
T T (q1 ,..., qs , q 1 ,..., q s , t ) - кинетическая энергия
Q j , j 1,..., s - обобщенные силы
ЗАКЛЮЧЕНИЕ
17. Достоинства уравнений Лагранжа
3. Для консервативных механических систем уравненияЛагранжа имеют вид
d T T
П
,
dt q q j
q j
j 1,..., s.
П (t , q1 ,..., qs ) - потенциальная энергия системы
Достоинства уравнений Лагранжа
1. Позволяют исключить из рассмотрения все
идеальные связи.
2. Их вид и число не зависят ни от
количества тел в системе, ни от вида их
движения.